一种配网带电作业机器人锂电池安装装置的制作方法
本发明属于配网机器人,具体涉及一种配网带电作业机器人锂电池安装装置。
背景技术:
1、带电作业可以保证电力系统的不间断供电,增强检修的计划性,不致因检修而影响用户的正常用电,提高检修质量,同时还能节约检修时间,减轻劳动强度,而带电作业机器人能够更好的完成带电作业,但是带电作业机器人存在问题是锂电池的安装,由于锂电池重量以及体积较大,因此常采用螺栓固定连接等方式进行锂电池的安装,螺栓连接等方式拆卸比较繁琐,由于在拆卸螺栓无法实现同时拆卸,因此当被拆卸的螺栓松动时,锂电池会由于自身的重力与机器人本体基准板脱离,另外在拆卸螺栓时无法保证旋出的长度相同,导致锂电池与安装位置发生倾斜或产生竖直方向的窜动,一方面使得锂电池安装不牢固,不能给机器人提供可靠的供电来源,另一方面使得螺栓较难被拆卸;因此,提供一种结构简单、便于使用、拆装便捷、拆装速度快、安全可靠的一种配网带电作业机器人锂电池安装装置是非常有必要的。
技术实现思路
1、本发明的目的是为了克服现有技术的不足,而提供一种结构简单、便于使用、拆装便捷、拆装速度快、安全可靠的一种配网带电作业机器人锂电池安装装置。
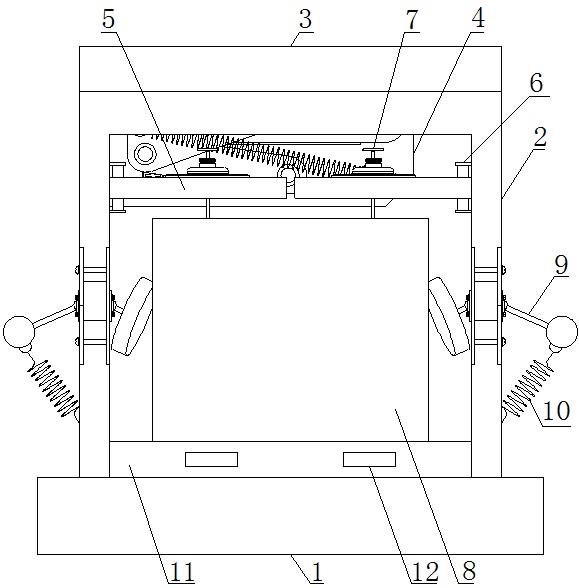
2、本发明的目的是这样实现的:一种配网带电作业机器人锂电池安装装置,它包括底座和箱体,所述的底座上方设置有箱体,所述的箱体上方设置有箱盖,所述的箱盖通过翻转机构与箱体连接,所述的箱体内部上方左右两侧均设置有活动板,所述的活动板一端均通过相应的活动轴与箱体侧壁活动连接,所述的活动板上方均设置有固定机构,所述的活动板下方设置有锂电池,所述的锂电池左右两侧均设置有镜像锁定机构,所述的镜像锁定机构下方均设置有锁紧弹簧,所述的锂电池下方设置有电性连接板,所述的电性连接板前面左右两侧均设置有电性连接器。
3、所述的翻转机构包括固定板和连接板,所述的固定板通过固定螺丝与箱体连接,所述的连接板与箱盖连接。
4、所述的固定板前面下方设置有第一连杆,所述的第一连杆两端均通过相应的第一销轴分别与固定板、连接板活动连接,所述的第一连杆上方设置有第二连杆,所述的第二连杆两端均通过相应的第二销轴分别与固定板、连接板活动连接,所述的第二连杆前面设置有定位弹簧,所述的定位弹簧两端均通过相应的弹簧杆分别与固定板、连接板连接。
5、所述的固定机构包括底板,所述的底板上方设置有基座,所述的基座上方设置有锁定套,所述的锁定套上方设置有螺纹套,所述的螺纹套上方设置有t型杆,所述的t型杆贯穿固定机构、活动板与锂电池接触。
6、所述的锁定套包括锁定腔体和内螺纹,所述的锁定套下方设置有锁定腔体,所述的锁定腔体位于基座内部且所述的锁定腔体左右两侧通过横杆与基座内壁连接,所述的锁定套内部上方设置有内螺纹。
7、所述的螺纹套内部对应t型杆处设置有通孔,所述的螺纹套外部设置有外螺纹,所述的螺纹套通过外螺纹与锁定套的内螺纹螺纹连接。
8、所述的锁定腔体内部设置有松紧部件,所述的松紧部件上方外周均匀设置有若干个分叉板,所述的分叉板上方均设置有锥面且所述的分叉板与锥面整体构成上宽下窄的锥形结构。
9、所述的镜像锁定机构包括一组侧板,所述的侧板之间通过固定螺钉连接,所述的侧板内侧设置有活动中空套筒,所述的侧板左侧设置有第一限位板,所述的第一限位板内部设置有第一大球体,所述的第一大球体左侧设置有摇杆,所述的摇杆下方设置有与锁紧弹簧连接的挂环。
10、所述的侧板右侧设置有第二限位板,所述的第二限位板内部设置有第二大球体,所述的第二大球体右侧设置有第三连杆,所述的第三连杆右侧设置有锁定块。
11、所述的活动中空套筒内部左右两侧均设置有锥形座,所述的锥形座内侧设置有套管,所述的套管内部左右两侧均设置有小球体,所述的小球体外侧均设置有第四连杆,所述的小球体均通过相应的第四连杆分别与第一大球体、第二大球体连接。
12、本发明的有益效果:本发明为一种配网带电作业机器人锂电池安装装置,在使用中,向上打开箱盖,箱盖通过翻转机构实现90度翻转,进而实现箱盖的开启,然后逆时针旋转固定机构,解除固定机构对锂电池的锁定状态,然后转动活动板,活动板绕着活动轴转动到与箱体侧壁接触的一侧,然后取下锁紧弹簧,使得锁紧弹簧与镜像锁定机构解除连接状态,解除镜像锁定机构对锂电池的锁定状态,断开锂电池与电性连接器的连接状态后即可取下锂电池,然后对锂电池进行更换,将充满电的锂电池放入箱体内并与电性连接器连接,通过底座与箱体的配合,便于将锂电池安装在箱体内部,提高对锂电池的支撑性,然后通过镜像锁定机构对锂电池进行锁定后将锁定弹簧与镜像锁定机构连接,通过活动板与固定机构的配合,将锂电池卡紧在箱体内部,保证对锂电池的卡装效果,安装方便快速;相比于传统的螺栓连接方式,本发明拆装便捷且速度快,使用更为方便、安全和可靠,效率更高,避免螺栓安装带来的拆卸比较繁琐、螺栓无法实现同时拆卸导致锂电池会由于自身的重力与机器人本体基准板脱离以及螺栓旋出的长度不同导致锂电池与安装位置发生倾斜或产生竖直方向的窜动等问题,实用性更高;本发明具有结构简单、便于使用、拆装便捷、拆装速度快、安全可靠的优点。
技术特征:
1.一种配网带电作业机器人锂电池安装装置,它包括底座和箱体,其特征在于:所述的底座上方设置有箱体,所述的箱体上方设置有箱盖,所述的箱盖通过翻转机构与箱体连接,所述的箱体内部上方左右两侧均设置有活动板,所述的活动板一端均通过相应的活动轴与箱体侧壁活动连接,所述的活动板上方均设置有固定机构,所述的活动板下方设置有锂电池,所述的锂电池左右两侧均设置有镜像锁定机构,所述的镜像锁定机构下方均设置有锁紧弹簧,所述的锂电池下方设置有电性连接板,所述的电性连接板前面左右两侧均设置有电性连接器。
2.如权利要求1所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的翻转机构包括固定板和连接板,所述的固定板通过固定螺丝与箱体连接,所述的连接板与箱盖连接。
3.如权利要求2所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的固定板前面下方设置有第一连杆,所述的第一连杆两端均通过相应的第一销轴分别与固定板、连接板活动连接,所述的第一连杆上方设置有第二连杆,所述的第二连杆两端均通过相应的第二销轴分别与固定板、连接板活动连接,所述的第二连杆前面设置有定位弹簧,所述的定位弹簧两端均通过相应的弹簧杆分别与固定板、连接板连接。
4.如权利要求1所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的固定机构包括底板,所述的底板上方设置有基座,所述的基座上方设置有锁定套,所述的锁定套上方设置有螺纹套,所述的螺纹套上方设置有t型杆,所述的t型杆贯穿固定机构、活动板与锂电池接触。
5.如权利要求4所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的锁定套包括锁定腔体和内螺纹,所述的锁定套下方设置有锁定腔体,所述的锁定腔体位于基座内部且所述的锁定腔体左右两侧通过横杆与基座内壁连接,所述的锁定套内部上方设置有内螺纹。
6.如权利要求4所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的螺纹套内部对应t型杆处设置有通孔,所述的螺纹套外部设置有外螺纹,所述的螺纹套通过外螺纹与锁定套的内螺纹螺纹连接。
7.如权利要求5所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的锁定腔体内部设置有松紧部件,所述的松紧部件上方外周均匀设置有若干个分叉板,所述的分叉板上方均设置有锥面且所述的分叉板与锥面整体构成上宽下窄的锥形结构。
8.如权利要求1所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的镜像锁定机构包括一组侧板,所述的侧板之间通过固定螺钉连接,所述的侧板内侧设置有活动中空套筒,所述的侧板左侧设置有第一限位板,所述的第一限位板内部设置有第一大球体,所述的第一大球体左侧设置有摇杆,所述的摇杆下方设置有与锁紧弹簧连接的挂环。
9.如权利要求8所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的侧板右侧设置有第二限位板,所述的第二限位板内部设置有第二大球体,所述的第二大球体右侧设置有第三连杆,所述的第三连杆右侧设置有锁定块。
10.如权利要求8所述的一种配网带电作业机器人锂电池安装装置,其特征在于:所述的活动中空套筒内部左右两侧均设置有锥形座,所述的锥形座内侧设置有套管,所述的套管内部左右两侧均设置有小球体,所述的小球体外侧均设置有第四连杆,所述的小球体均通过相应的第四连杆分别与第一大球体、第二大球体连接。
技术总结
本发明涉及一种配网带电作业机器人锂电池安装装置,它包括底座和箱体,底座上方设置有箱体,箱体上方设置有箱盖,箱盖通过翻转机构与箱体连接,箱体内部上方左右两侧均设置有活动板,活动板一端均通过相应的活动轴与箱体侧壁活动连接,活动板上方均设置有固定机构,活动板下方设置有锂电池,锂电池左右两侧均设置有镜像锁定机构,镜像锁定机构下方均设置有锁紧弹簧,锂电池下方设置有电性连接板,电性连接板前面左右两侧均设置有电性连接器;本发明具有结构简单、便于使用、拆装便捷、拆装速度快、安全可靠的优点。
技术研发人员:江建,徐峰亮,杨益
受保护的技术使用者:国网河南省电力公司信阳供电公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!