一种键合装置及键合方法与流程
本技术涉及半导体制造领域,尤其是涉及一种键合装置及键合方法。
背景技术:
1、随着半导体技术进入后摩尔时代,为满足高集成度和高性能的需求,芯片结构向着三维方向发展。其中,通过键合技术实现“异质混合”是“超摩尔定律”的重要技术之一,芯片(die)与芯片(或芯片与晶圆)混合键合工艺能够将不同工艺节点制程的芯片进行高密度的互连,实现更小尺寸、更高性能和更低功耗的系统级集成。其中,半导体键合技术是指将两片同质或异质半导体材料经过表面清洗和活化处理后,在一定的条件下直接结合,通过范德华力、分子力甚至原子力使晶圆键合成为一体的技术。目前常用的键合方式包括如下三种:晶圆-晶圆键合技术(wafer-to-wafer,w2w)、芯片-晶圆键合技术(chip-to-wafer,c2w)以及芯片-芯片键合技术(chip-to-chip,c2c)。其中,c2w键合工艺因为不受芯片尺寸匹配限制,而受到全球半导体厂商的青睐。
2、在c2w键合工艺中,为了保证键合精度,在将芯片转移到晶圆上时,需先与相应的晶圆进行对准再实施键合。为了实现键合对准精度,目前的c2w键合工艺中的对准系统中,通常会设置两组镜头组件以分别识别一个晶圆上的一组对准标记(mark)和一个芯片上的一组对准标记。而在对晶圆和芯片进行对准时,主要有两种方法,一种方法是:两组镜头组件固定,芯片和晶圆以两组镜头组件为基准来对准;另一种方法则是以晶圆为基准,两组镜头组件和芯片运动来对准。而不论是哪种对准方法,设置两组镜头组件的对准系统均需要在同一视场内同时识别两组对准标记,对准标记的位置受镜头组件的视场大小限制,从而导致芯片的对准标记与晶圆对准标记分布受限,且每个芯片需要进行多次对准,耗时较长,导致产率较低。
技术实现思路
1、本技术提供一种键合装置和键合方法,以有效缩短耗时,并有利于提高键合效率,提高产率。
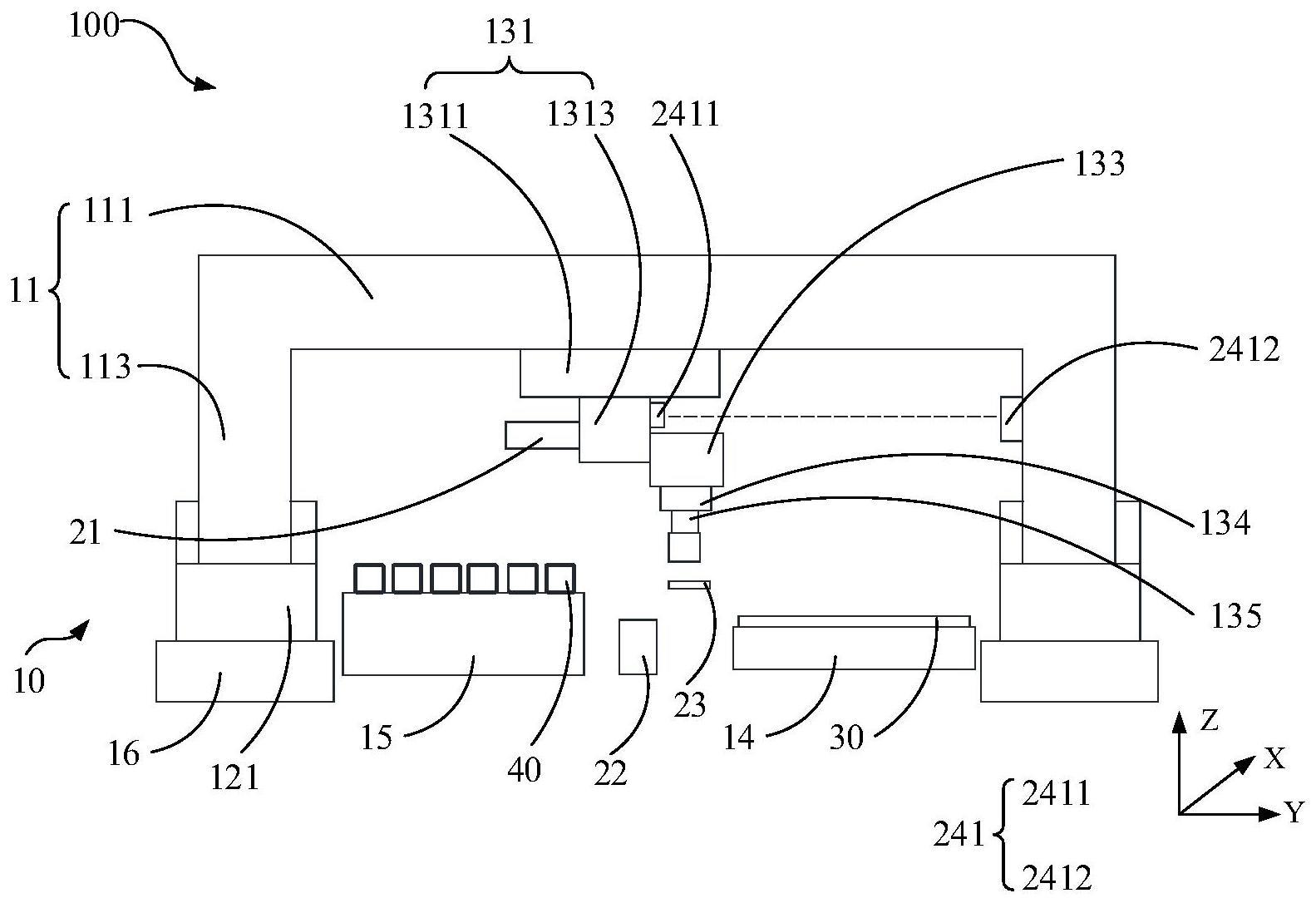
2、为解决上述技术问题,本技术提供的第一个技术方案为:提供一种键合装置,包括:机台、包括可移动取物台;激光干涉仪组件包括:第一激光干涉仪单元,被配置为确定所述可移动取物台沿第一方向的位移信息;第二激光干涉仪单元,被配置为确定所述可移动取物台沿第二方向的位移信息;基于所述沿第一方向的位移信息和所述沿第二方向的位移信息,所述激光干涉仪组件还被配置为确定所述可移动取物台的坐标信息。
3、在一些实施例中,所述第一激光干涉仪单元包括:第一反光镜和第一激光干涉仪,其中,所述第一反光镜和所述第一激光干涉仪被配置为随所述可移动取物台同步在所述第二方向发生位移;所述第二激光干涉仪单元包括:第二反光镜和第二激光干涉仪,其中,所述第二反光镜和所述第二激光干涉仪被配置为随所述可移动取物台同步在所述第一方向发生位移。
4、在一些实施例中,所述机台还包括:基架和设于所述基架的门架;其中,所述第一激光干涉仪单元的位置由门架控制;所述第一反光镜设于所述可移动取物台,且所述第一激光干涉仪设于所述门架的一侧板;或所述第一激光干涉仪设于所述可移动取物台,且所述第一反光镜设于所述门架的一侧板;其中,在平行于所述门架的侧板的平面内,所述第一反光镜的投影与所述第一激光干涉仪的投影至少部分重合;基于所述可移动取物台沿所述第一方向发生的位移变化,所述第一反光镜和所述第一激光干涉仪共同配合以确定所述可移动取物台沿所述第一方向的位移信息。
5、在一些实施例中,所述第二激光干涉仪单元的位置由所述门架和所述基架共同控制;所述第二反光镜设于所述门架的另一侧板,且所述第二激光干涉仪设于所述基架的侧板;或所述第二激光干涉仪设于所述门架的另一侧板,所述第二反光镜设于所述基架的侧板;其中,在平行于所述基架的侧板的平面内,所述第二反光镜的投影与所述第二激光干涉仪的投影至少部分重合;基于所述可移动取物台沿所述第二方向发生的位移变化,所述第二反光镜和所述第二激光干涉仪共同配合以确定所述可移动取物台沿所述第二方向的位移信息。
6、在一些实施例中,所述键合装置还包括:第一卡盘,被配置为承载待键合的第一元件;第一图像采集件,位于所述可移动取物台的一侧且具有第一视角,并被配置为读取所述第一元件的第一对准标记和第二对准标记;以及第二图像采集件,位于所述机台且具有第二视角,并被配置为读取被所述可移动取物台拾取的第二元件的第三对准标记和第四对准标记。
7、在一些实施例中,基于所述第一图像采集件的视场范围位于待键合的第一元件所在的区域,所述第一图像采集件被配置为读取所述第一元件的第一对准标记和第二对准标记;基于所述可移动取物台拾取的第二元件移动至所述第二图像采集件的视场范围,所述第二图像采集件被配置为读取所述第二元件的第三对准标记和第四对准标记。
8、在一些实施例中,所述键合装置还包括:参考组件,设于所述机台;所述参考组件设置有参考标记,且基于所述参考组件位于同一位置时,所述第一图像采集件与所述第二图像采集件被配置为识别所述参考标记获得的不同坐标信息,以确定所述校正坐标系中的固定坐标。
9、在一些实施例中,所述激光干涉仪组件还包括:计算机系统,分别与所述第一激光干涉仪、所述第二激光干涉仪连接;其中,基于读取的第一对准标记和第二对准标记,或基于读取的第三对准标记和第四对准标记,所述计算机系统被配置成定义所述校正坐标系;基于确定的所述固定坐标,所述计算机系统被配置为在所述校正坐标系中产生与所述第一对准标记、所述第二对准标记、所述第三对准标记以及所述第四对准标记沿所述第一方向和所述第二方向的坐标信息;基于产生的沿所述第一方向和所述第二方向的坐标信息,所述计算机系统还被配置为确定所述第一元件的预设表面位置和所述第二元件位置之间的角度偏差,且所述激光干涉仪组件配合所述可移动取物台调整所述第二元件的位置,以使所述第二元件键合在所述第一元件的预设表面位置。
10、在一些实施例中,所述可移动取物台包括:键合头,被配置为拾取待键合的第二元件;第一驱动件,包括:第一宏驱动件,位于所述门架的顶板朝向所述第一卡盘的一侧,且被配置为在水平面内沿所述第一方向移动所述键合头;和第一微驱动件,位于所述第一宏驱动件背离所述顶板的一侧,且被配置为在所述水平面内沿所述第一方向微移动所述键合头;以及第二驱动件,包括:第二宏驱动件,位于所述基架的底板朝向所述门架的一侧,且被配置为在所述水平面内沿所述第二方向移动所述键合头;和第二微驱动件,连接于所述第二宏驱动件和所述门架,且被配置为在所述水平面内沿所述第二方向微移动所述键合头。
11、为解决上述技术问题,本技术提供的第二个技术方案为:提供一种键合方法,包括:读取待键合的第一元件的第一对准标记和第二对准标记;读取待键合的第二元件的第三对准标记和第四对准标记;根据所述第一对准标记和所述第二对准标记,或根据所述第三对准标记和所述第四对准标记,确定校正坐标系;确定所述校正坐标系中的固定坐标;根据所述第一对准标记、所述第二对准标记、所述第三对准标记、所述第四对准标记和所述固定坐标,确定第一方向坐标信息,第二方向坐标信息;根据所述第一方向坐标信息和所述第二方向坐标信息,确定所述第一元件和所述第二元件的键合对准位置;以及键合所述第二元件于所述第一元件的预设表面位置。
12、在一些实施例中,根据所述第一方向坐标信息和所述第二方向坐标信息确定所述第一元件和所述第二元件的键合对准位置包括:根据所述第一对准标记、所述第二对准标记、所述第三对准标记和所述第四对准标记沿所述第一方向和所述第二方向的坐标信息,确定角度偏差;根据所述角度偏差,校正所述第一元件和所述第二元件的相对位置;根据校正的相对位置,确定所述第一元件和所述第二元件的键合对准位置。
13、在一些实施例中,所述确定所述校正坐标系中的固定坐标包括:通过读取参考组件位于同一位置时,所述第一图像采集件与所述第二图像采集件识别所述参考标记获得的不同坐标信息,确定所述固定坐标。
14、在一些实施例中,所述根据所述第一对准标记、所述第二对准标记、所述第三对准标记和所述第四对准标记,确定第一方向坐标信息,第二方向坐标信息包括:控制第一激光干涉仪单元在所述校正坐标系中产生与所述第一对准标记、所述第二对准标记、所述第三对准标记和所述第四对准标记在所述第一方向的位移信息,并控制所述计算机系统将所述在第一方向上的位移信息转换为在所述第一方向上的坐标信息;控制第二激光干涉仪单元在所述校正坐标系中产生与所述第一对准标记、所述第二对准标记、所述第三对准标记和所述第四对准标记在所述二方向的位移信息,并控制所述计算机系统将所述在第二方向上的位移信息转换为在所述第二方向上的坐标信息。
15、在一些实施例中,产生在所述第一方向的坐标信息包括:通过第一激光干涉仪和第一反光镜确定可移动取物台沿所述第一方向的位移信息;根据沿所述第一方向的位移信息,在所述校正坐标系中产生与所述第一对准标记、所述第二对准标记、所述第三对准标记以及所述第四对准标记在所述第一方向的坐标信息;产生在所述第二方向的坐标信息包括:通过第二激光干涉仪和第二反光镜确定可移动取物台沿所述第二方向的位移信息;根据沿所述第二方向的位移信息,在所述校正坐标系中产生与所述第一对准标记、所述第二对准标记、所述第三对准标记以及所述第四对准标记在所述第二方向的坐标信息。区别于相关技术,本技术提供的键合装置的结构设计中,通过设置激光干涉仪组件,并通过第一激光干涉仪单元测量可移动取物台沿第一方向的位移变化进而确定可移动取物台在第一方向上的位移信息,以及通过第二激光干涉仪单元测量可移动取物台沿第二方向的位移变化进而确定可移动取物台在第二方向上的位移信息。由此,可以通过第一激光干涉仪单元和第二激光干涉仪单元,与可移动取物台形成高精度的运动闭环,进而实现可移动取物台的精确定位,从而提高键合精度。
16、进一步地,本技术提供的键合装置还通过设置参考组件,并配置为根据校正信息校正待键合的第一元件和待键合的第二元件的相对位置,从而仅需对待键合的第一元件识别一次和参考组件识别一次即可确定校正信息并校正待键合的第一元件和待键合的第二元件的相对位置。由此,本技术中的键合装置无需通过两个相机在同一视场内同时识别待键合的第一元件和待键合的第二元件,即可完成第二元件和第一元件的对准并进行键合,同时也无需对每个待键合的第二元件进行多次对准,有效缩短耗时,并有利于提高键合效率,提高产率。
17、进一步地,本技术中键合装置经过参考组件中的两个图像采集件和参考元件同时识别参考元件的校正标记即可,因此,待键合的第一元件的对准标记和待键合的第二元件的对准标记分布不受限制,进而有效减少了待键合的第一元件的对准标记和待键合的第二元件的对准标记受相机视场大小限制的影响。
- 还没有人留言评论。精彩留言会获得点赞!