一种超洁净环境的机械臂吸力调节方法及系统与流程
本发明涉及晶圆传送,更具体地说,本发明涉及一种超洁净环境的机械臂吸力调节方法及系统。
背景技术:
1、在超洁净环境中,机械臂上设置有多个吸盘,吸盘与真空泵相连接,通过真空泵抽取超洁净环境中的气体,从而达到晶圆传送目的。吸力补偿是晶圆传送最重要的一项功能,从而提供晶圆传送稳定的吸力。传统的吸力补偿是通过定期对真空泵进行气密性检查从而获得气体泄漏数据,基于气体泄漏数据再进行调整,但这种方式存在一定的局限性,需要通过将真空泵停止运行后才能获得气体泄漏数据,为此在实际使用过程中,由于气体泄漏数据不能实时获取,当吸力值达不到预期值时,会出现晶圆掉落。
2、目前,缺乏晶圆在传送过程中对吸力值进行实时调节,当然也存在部分调节发明,如申请公开号cn115332143a的申请文件,公开了一种适用于晶圆传送用机械臂的数据处理方法及系统,获取晶圆和晶圆贴片的总重量信息,根据总重量信息计算综合吸力值,根据初始膜区域分配系数、初始贴片区域分配系数对综合吸力值进行分解,得到位于保护膜区域每个第一吸盘的第一吸力值,以及位于贴片区域每个第二吸盘的第二吸力值;若第一吸盘的第一吸力值大于等于晶圆保护膜处的第一超限值,根据相应第一吸盘的位置确定第一待检测区域;获取所述第一待检测区域的第一平整度信息,根据所述第一平整度信息确定第一待检测区域的差值信息,根据所述差值信息或用户输入信息对所述第一吸力值的权重值进行训练,可以针对不同重量的晶圆自动生成相应的吸力进行晶圆的转运,提升良品率。
3、上述方法虽然在晶圆传送过程中对吸力进行权重值训练,为了保证晶圆在传送的安全性,根据不同的晶圆重量调整吸盘的吸力,由于真空泵的长时间运转,容易出现密封圈老化、损坏或安装不牢固问题,从而导致密封性不良,当出现此类情况时,使得在传送相同重量的晶圆时,实时变化的吸力值达不到预期值,导致在晶圆在翻转动作时出现掉落损坏,增加了生产晶圆破损率。
4、为此,本发明提供了一种超洁净环境的机械臂吸力调节方法及系统。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种超洁净环境的机械臂吸力调节方法及系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种超洁净环境的机械臂吸力调节方法,包括:
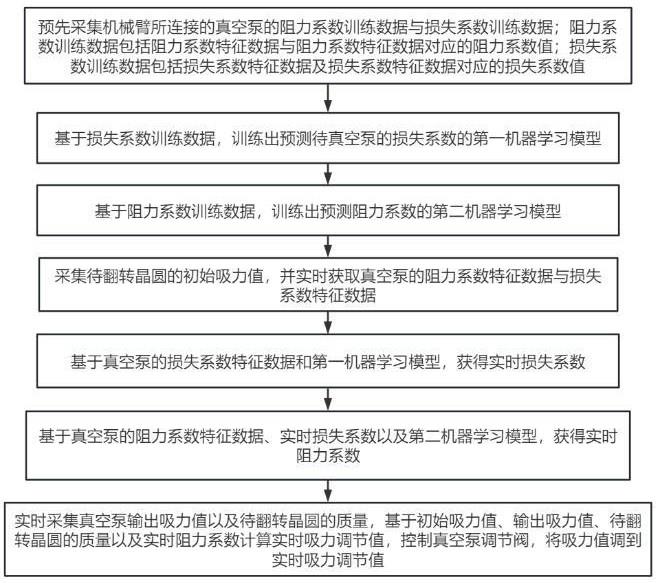
3、预先采集机械臂所连接的真空泵的阻力系数训练数据与损失系数训练数据;阻力系数训练数据包括阻力系数特征数据与阻力系数特征数据对应的阻力系数值;损失系数训练数据包括损失系数特征数据及损失系数特征数据对应的损失系数值;
4、基于损失系数训练数据,训练出预测真空泵的损失系数值的第一机器学习模型;
5、基于阻力系数训练数据,训练出预测真空泵的阻力系数值的第二机器学习模型;
6、采集待翻转晶圆的初始吸力值,并实时获取真空泵的阻力系数特征数据与损失系数特征数据;
7、基于真空泵的损失系数值特征数据和第一机器学习模型,获得实时损失系数值;
8、基于真空泵的阻力系数特征数据、实时损失系数值以及第二机器学习模型,获得实时阻力系数值;
9、实时采集真空泵输出吸力值以及待翻转晶圆的质量,基于初始吸力值、输出吸力值、待翻转晶圆的质量以及实时阻力系数值计算实时吸力调节值,控制真空泵调节阀,将吸力值调到实时吸力调节值。
10、进一步地,阻力系数特征数据包括摩擦阻力、气体流速、气体密度、真空泵的损失系数值、环境温度与环境湿度;损失系数特征数据包括泄露气体流量、真空泵气体容积、真空泵压力值与真空泵温度。
11、进一步地,摩擦阻力为抽取气体时与真空泵壁面发生摩擦产生的阻力,通过摩擦测量仪多次测量并计算平均值获得;
12、气体流速为真空泵抽取超洁净环境中的气体所产生的流速,通过气体流量计进行测量获取;
13、气体密度为真空泵抽取超洁净环境中气体的密度,通过气体密度计检测获取;
14、损失系数值为真空泵的密封度,通过使用损失系数测量方法获取;
15、环境温度与环境湿度通过温度计与湿度计测量实验环境中的温湿度;
16、阻力系数值为真空泵抽取气体受到的平均阻力值,在收集过程中,通过压差计测量并计算平均值获取。
17、进一步地,泄漏气体流量为真空泵泄漏源流出的气体流量,通过氦质谱仪获取;
18、真空泵压力值通过压力测量设备测量获取;
19、真空泵气体容积为真空泵抽取气体的容积,通过激光干涉仪进行测量获取;
20、真空泵温度通过温度计测量获取。
21、进一步地,训练出预测真空泵的损失系数值的第一机器学习模型的方式为:
22、将每组损失系数特征数据集合转换为第一特征向量,第一特征向量中的元素包括泄露气体流量、真空泵气体容积、真空泵压力值与真空泵温度的值;
23、所有第一特征向量的集合作为第一机器学习模型的输入,所述第一机器学习模型以对每组损失系数特征数据预测的损失系数值作为输出,以每组损失系数特征数据对应的实际的损失系数值作为预测目标,以最小化所有预测的损失系数值的第一预测准确度之和作为训练目标;其中,第一预测准确度的计算公式为;,其中,为每组损失系数特征数据的编号,组损失系数特征数据对应的预测的损失系数值,组损失系数特征数据对应的实际的损失系数值;对第一机器学习模型进行训练,直至第一预测准确度达到收敛时停止训练;优选的,所述第一机器学习模型为深度神经网络模型或深度信念网络模型中的任意一种。
24、进一步地,训练出预测真空泵的阻力系数值的第二机器学习模型的方式为:
25、将每组阻力系数特征数据集合转换为第二特征向量,其中,第二特征向量中的元素包括气体流速、气体密度、真空泵的损失系数值、环境温度与环境湿度的值;
26、所有第二特征向量的集合作为第二机器学习模型的输入,所述第二机器学习模型以对每组阻力系数特征数据预测的阻力系数值作为输出,以每组阻力系数特征数据对应的实际的阻力系数值作为预测目标,以最小化所有预测的阻力系数值的第二预测准确度之和作为训练目标;其中,第二预测准确度的计算公式为;,其中,为每组阻力系数特征数据的编号,组阻力系数特征数据对应的预测的阻力系数值,组阻力系数特征数据对应的实际阻力系数值;对第二机器学习模型进行训练,直至第二预测准确度达到收敛时停止训练;优选的,所述第二机器学习模型为深度神经网络模型或深度信念网络模型中的任意一种;
27、进一步地,获得实时损失系数值的方式为:将待晶圆翻转的真空泵的损失系数特征数据集合为第一特征向量,并将第一特征向量输入至第一机器学习模型,第一机器学习模型输出预测的实时损失系数值。
28、进一步地,获得实时阻力系数值的方法为:将第一机器学习模型输出预测的实时损失系数值标记为ssx,并将待翻转晶圆的真空泵的阻力系数特征数据中的损失系数设置为ssx,将待翻转晶圆的真空泵的阻力系数特征数据集合为第二特征向量,并将第二特征向量输入至第二机器学习模型,第二机器学习模型输出预测的实时阻力系数值。
29、进一步地,所述初始吸力值为待晶圆翻转的真空泵的吸力值,通过预先使用的真空计获得;待翻转晶圆的真空泵输出吸力值以及晶圆质量分别通过真空计和负载传感器实时采集;
30、计算实时吸力调节值的方式为:将初始吸力值标记为,将待翻转晶圆的目标吸力值标记为,将晶圆质量大小标记为,第二机器学习模型预测的实时阻力系数标记为;
31、将实时吸力调节值标记为;其中,实时吸力调节值的计算公式为:
32、。
33、第二方面,本发明提供一种超洁净环境的机械臂吸力调节系统,用于实现上述的一种超洁净环境的机械臂吸力调节方法,包括:
34、第一数据采集模块,用于预先采集机械臂所连接的真空泵的阻力系数训练数据与损失系数训练数据;阻力系数训练数据包括阻力系数特征数据与阻力系数特征数据对应的阻力系数值;损失系数训练数据包括损失系数特征数据及损失系数特征数据对应的损失系数值;
35、第一模型训练模块,基于损失系数训练数据,训练出预测真空泵的损失系数值的第一机器学习模型;
36、第二模型训练模块,基于阻力系数训练数据,训练出预测真空泵的阻力系数值的第二机器学习模型;
37、第二数据采集模块,用于采集待翻转晶圆的初始吸力值,并实时获取真空泵的阻力系数特征数据与损失系数特征数据;
38、损失系数处理模块,基于真空泵的损失系数特征数据和第一机器学习模型,获得实时损失系数值;
39、阻力系数处理模块,基于真空泵的阻力系数特征数据、实时损失系数值以及第二机器学习模型,获得实时阻力系数值;
40、吸力调节模块,实时采集真空泵输出吸力值以及待翻转晶圆的质量,基于初始吸力值、输出吸力值、待翻转晶圆的质量以及实时阻力系数值计算实时吸力调节值,控制真空泵调节阀,将吸力值调到实时吸力调节值。
41、第三方面,本发明提供一种电子设备,包括:处理器和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;
42、所述处理器通过调用所述存储器中存储的计算机程序,执行上述的一种超洁净环境的机械臂吸力调节方法。
43、第四方面,本发明提供一种计算机可读存储介质,储存有指令,当所述指令在计算机上运行时,使得计算机执行上述的一种超洁净环境的机械臂吸力调节方法。
44、本发明的技术效果和优点:
45、本发明通过预先在实验环境中采集阻力系数特征数据以及损失系数特征数据,并通过精确测量的方式获得阻力系数值与损失系数值,基于损失系数特征数据与其对应的损失系数值训练出预测损失系数值的第一机器学习模型,基于阻力系数特征数据与其对应的阻力系数值训练出预测阻力系数值的第二机器学习模型;在超洁净环境中,实时采集在待翻转晶圆的真空泵的初始吸力值、晶圆质量以及待翻转晶圆的目标吸力值,根据损失系数特征数据作为第一机器学习,获得预测的损失系数值,将预测的损失系数值作为阻力系数特征数据的损失系数,通过第二机器学习获得预测的损失系数值,并基于真空泵的初始吸力值、晶圆质量以及待翻转晶圆的目标吸力值计算出实时吸力调节值,提高了吸力值补偿的准确性,实现了在动态变化的真空泵中,实时调节吸力调节值,保证晶圆翻转时的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!