一种便于夹取的晶圆传送机械臂的制作方法
本发明属于半导体,具体涉及一种便于夹取的晶圆传送机械臂。
背景技术:
1、晶圆是制作硅半导体电路所用的硅晶片,硅晶片是通过硅晶棒在经过研磨,抛光,清洗,切片后得到的片状硅晶,通常为圆形,也就是晶圆,而从晶圆到成品中间还需要经过多道加工工序,因此需要传送机械臂将晶圆从料盒中转运至输送带或者工作台上。
2、现有的传送机械臂通常采用吸盘吸附方式,但是经过清洗后的晶圆表面上残留有液体,使得吸盘吸附困难,甚至会导致晶圆发生脱落的情况,并且晶圆表面上产留的液体会导致堆叠的晶圆吸附在一起,需要手动分片,十分影响工作效率。
技术实现思路
1、本发明的目的是为了解决背景技术中的问题,而提出的一种便于夹取的晶圆传送机械臂。
2、为了实现上述目的,本发明采用了如下技术方案:
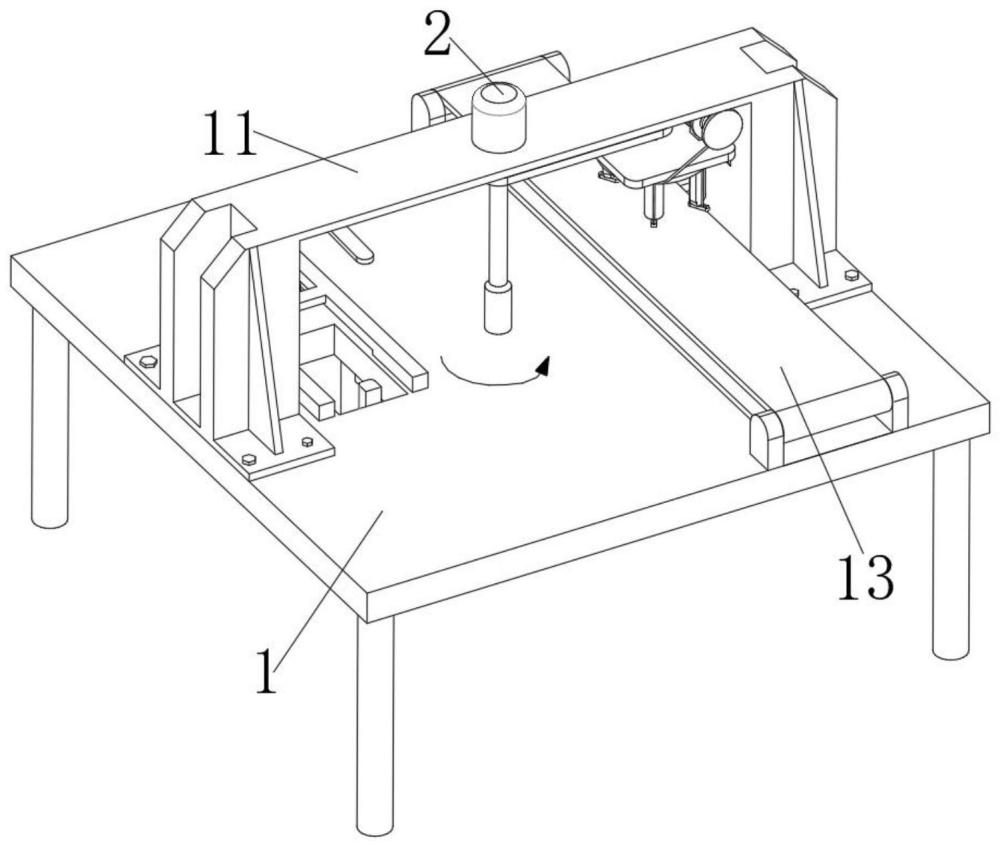
3、一种便于夹取的晶圆传送机械臂,包括底座,所述底座的外壁上通过螺栓连接有支座,所述支座的外壁上通过螺栓连接有电机,所述电机的主轴上焊接有悬臂,所述悬臂的端部外壁上焊接有电推杆,所述电推杆的输出端焊接有安装架,所述安装架位于悬臂两侧的外壁上焊接有两对对称分布的限位柱,所述安装架靠近限位柱的一侧外壁上转动插接有调节架,所述调节架的外壁上焊接有若干个调节柱,每个所述限位柱的端部外壁上转动插接有拦截块,每个所述拦截块的外壁上开设有行程槽,每个所述拦截块与调节柱一一对应,每个所述调节柱滑动插接在行程槽内,所述底座的底部外壁上焊接有料盒,所述底座的外壁上设置有输送带,所述安装架上设置有调节机构,所述料盒内设置有分片机构。
4、在上述的一种便于夹取的晶圆传送机械臂中,所述底座的外壁上设置有限位框和避位槽,所述料盒延伸至限位框内,所述限位框的外壁上开设有拨槽,所述避位槽与限位柱相适配,所述避位槽和输送带对称分布在电机的两侧,所述避位槽与电机的距离与悬臂的长度相适配。
5、在上述的一种便于夹取的晶圆传送机械臂中,所述调节机构包括调节齿轮,所述安装架的顶部外壁上焊接有支架,所述支架的外壁上通过转轴转动插接有调节齿轮,所述调节齿轮两侧的转轴上焊接有一对对称分布的绞盘,每个所述绞盘的外壁上均缠绕有软绳,两个所述软绳的缠绕方向相反,每个所述软绳的端部均粘接在调节架远离绞盘的一侧外壁上。
6、在上述的一种便于夹取的晶圆传送机械臂中,所述支座靠近料盒和输送带的两侧外壁上均滑动插接有调节齿条,每个所述调节齿条的外壁与支座的外壁之间均设置有弹簧一,每个所述调节齿条均与调节齿轮单向啮合,所述调节齿轮与靠近输送带一侧的调节齿条向下啮合,所述调节齿轮与靠近料盒一侧的调节齿条向上啮合。
7、在上述的一种便于夹取的晶圆传送机械臂中,所述分片机构包括拨杆,所述拨杆转动插接在底座的外壁上,所述拨杆与拨槽相适配,所述拨杆与悬臂始终保持垂直状态,所述拨杆的端部外壁上焊接有带轮二,所述电机的主轴端部外壁上焊接有带轮一,所述带轮一与带轮二直径大小相同,所述带轮一与带轮二的外壁上套装有传动带。
8、在上述的一种便于夹取的晶圆传送机械臂中,所述拨杆远离带轮二的一侧外壁上焊接有半齿轮一,所述料盒靠近限位框的一端内壁上开设有安装槽,所述安装槽内转动插接有齿圈,所述齿圈与半齿轮一相互啮合。
9、在上述的一种便于夹取的晶圆传送机械臂中,所述齿圈的内环壁上焊接有四个等距圆周分布的凸块一,所述齿圈的内环壁上滑动插接有一对对称分布的滑柱,每个所述滑柱的外壁上均焊接有转动块,每个所述转动块的外壁与齿圈的内环壁之间设置有弹簧三,所述弹簧三套装在滑柱的外壁上,每个所述转动块的外壁上均开设有滑槽,所述安装槽的内壁上滑动插接有四个等距圆周分布的夹持块,每个所述夹持块的外壁均焊接有滑杆,每个所述滑杆均与滑槽相适配,每个所述夹持块的外壁上均焊接有凸块二,所述凸块二与凸块一相适配。
10、在上述的一种便于夹取的晶圆传送机械臂中,所述拨杆靠近带轮二的一侧外壁上焊接有半齿轮二,所述料盒的底部外壁上焊接有凸台,所述凸台的外壁上转动插接有丝杆,所述丝杆的外壁上焊接有传动齿轮,所述传动齿轮与半齿轮二相互啮合,所述半齿轮二的直径大于传动齿轮的直径,所述丝杆的外壁上通过螺纹套装有上料架,所述上料架滑动插接在料盒内。
11、与现有技术相比,本发明的有益效果是:
12、1、通过设置的限位柱和拦截块,使得当限位柱插入避位槽时,避位槽内的晶圆能够进入限位柱之间,实现对晶圆的框选,限位柱端部的拦截块能够转动,从而能够将晶圆兜住,进而使得安装架能够携带晶圆进行转运,避免了传统吸盘吸附方式的一系列问题;
13、2、通过设置的分片机构,使得当电机带动悬臂从输送带向避位槽逆时针转动一百八十度时,在传动带的作用下,拨杆也随之同向转动半周,此时半齿轮一与齿圈啮合,从而使得齿圈带动转动块和凸块一转动,当凸块一与凸块二抵接时,凸块一向内推动凸块二,使得凸块二带动夹持块向晶圆靠近,实现对料盒内顶部第二个晶圆进行夹持的效果,同时夹持块通过滑杆带动转动块向晶圆靠近,实现对料盒内顶部第一个晶圆进行夹持的效果,从而使得转动块带动第一个晶圆相对第二个晶圆进行转动,使得晶圆之间出现间隙,从而使得空气进入间隙中,避免晶圆之间存在负压导致吸附过紧而无法分开的情况,当电机带动悬臂从避位槽向输送带逆时针转动一百八十度时,在传动带的作用下,拨杆也随之同向转动半周,此时半齿轮二与传动齿轮啮合,从而使得传动齿轮带动丝杆转动,在螺纹配合的作用下,进而使得上料架在料盒内上升一个晶圆厚度,从而将料盒内顶部第一个晶圆推进限位框内,实现向限位框内上料的效果;
14、3、通过设置的调节机构,使得当电机带动安装架转动至避位槽上方时,控制电推杆伸展,使得安装架带动限位柱下移,从而使得避位槽内的晶圆插接在限位柱之间,当安装架下降至底部后,控制电推杆收缩,安装架带动支架上的调节齿轮向上移动,使得调节齿轮与调节齿条向上啮合,从而使得两个绞盘转动,由于两个软绳的缠绕方向相反,使得一个绞盘收卷软绳,另一个绞盘释放软绳,从而使得收卷的软绳能够拉动调节架转动,调节架上的调节柱拨动拦截块转动,实现将限位柱之间的晶圆兜住,当电机带动安装架转动至输送带上方时,控制电推杆伸展,安装架带动调节齿轮向下移动,使得调节齿轮与调节齿条向下啮合,从而使得两个绞盘反向转动,进而使得软绳带动调节架反向转动,调节架带动调节柱反向拨动拦截块,使得拦截块收纳起来,从而使得限位柱之间的晶圆能够落下;
15、综上所述,通过设置的限位柱和拦截块,使得避位槽内的晶圆能够进入限位柱之间,实现对晶圆的框选,限位柱端部的拦截块能够转动,从而能够将晶圆兜住,进而使得安装架能够携带晶圆进行转运,避免了传统吸盘吸附方式的一系列问题,通过设置的分片机构,使得转动块带动第一个晶圆相对第二个晶圆进行转动,使得晶圆之间出现间隙,避免晶圆之间吸附过紧而无法分开的情况。
技术特征:
1.一种便于夹取的晶圆传送机械臂,包括底座(1),其特征在于:所述底座(1)的外壁上通过螺栓连接有支座(11),所述支座(11)的外壁上通过螺栓连接有电机(2),所述电机(2)的主轴上焊接有悬臂(21),所述悬臂(21)的端部外壁上焊接有电推杆(22),所述电推杆(22)的输出端焊接有安装架(23),所述安装架(23)位于悬臂(21)两侧的外壁上焊接有两对对称分布的限位柱(232),所述安装架(23)靠近限位柱(232)的一侧外壁上转动插接有调节架(24),所述调节架(24)的外壁上焊接有若干个调节柱(241),每个所述限位柱(232)的端部外壁上转动插接有拦截块(25),每个所述拦截块(25)的外壁上开设有行程槽(251),每个所述拦截块(25)与调节柱(241)一一对应,每个所述调节柱(241)滑动插接在行程槽(251)内,所述底座(1)的底部外壁上焊接有料盒(12),所述底座(1)的外壁上设置有输送带(13),所述安装架(23)上设置有调节机构,所述料盒(12)内设置有分片机构。
2.根据权利要求1所述的一种便于夹取的晶圆传送机械臂,其特征在于:所述底座(1)的外壁上设置有限位框(121)和避位槽(123),所述料盒(12)延伸至限位框(121)内,所述限位框(121)的外壁上开设有拨槽(122),所述避位槽(123)与限位柱(232)相适配,所述避位槽(123)和输送带(13)对称分布在电机(2)的两侧,所述避位槽(123)与电机(2)的距离与悬臂(21)的长度相适配。
3.根据权利要求1所述的一种便于夹取的晶圆传送机械臂,其特征在于:所述调节机构包括调节齿轮(26),所述安装架(23)的顶部外壁上焊接有支架(231),所述支架(231)的外壁上通过转轴转动插接有调节齿轮(26),所述调节齿轮(26)两侧的转轴上焊接有一对对称分布的绞盘(261),每个所述绞盘(261)的外壁上均缠绕有软绳(262),两个所述软绳(262)的缠绕方向相反,每个所述软绳(262)的端部均粘接在调节架(24)远离绞盘(261)的一侧外壁上。
4.根据权利要求3所述的一种便于夹取的晶圆传送机械臂,其特征在于:所述支座(11)靠近料盒(12)和输送带(13)的两侧外壁上均滑动插接有调节齿条(111),每个所述调节齿条(111)的外壁与支座(11)的外壁之间均设置有弹簧一(112),每个所述调节齿条(111)均与调节齿轮(26)单向啮合,所述调节齿轮(26)与靠近输送带(13)一侧的调节齿条(111)向下啮合,所述调节齿轮(26)与靠近料盒(12)一侧的调节齿条(111)向上啮合。
5.根据权利要求1所述的一种便于夹取的晶圆传送机械臂,其特征在于:所述分片机构包括拨杆(3),所述拨杆(3)转动插接在底座(1)的外壁上,所述拨杆(3)与拨槽(122)相适配,所述拨杆(3)与悬臂(21)始终保持垂直状态,所述拨杆(3)的端部外壁上焊接有带轮二(31),所述电机(2)的主轴端部外壁上焊接有带轮一(27),所述带轮一(27)与带轮二(31)直径大小相同,所述带轮一(27)与带轮二(31)的外壁上套装有传动带(32)。
6.根据权利要求5所述的一种便于夹取的晶圆传送机械臂,其特征在于:所述拨杆(3)远离带轮二(31)的一侧外壁上焊接有半齿轮一(33),所述料盒(12)靠近限位框(121)的一端内壁上开设有安装槽(125),所述安装槽(125)内转动插接有齿圈(4),所述齿圈(4)与半齿轮一(33)相互啮合。
7.根据权利要求6所述的一种便于夹取的晶圆传送机械臂,其特征在于:所述齿圈(4)的内环壁上焊接有四个等距圆周分布的凸块一(41),所述齿圈(4)的内环壁上滑动插接有一对对称分布的滑柱(421),每个所述滑柱(421)的外壁上均焊接有转动块(42),每个所述转动块(42)的外壁与齿圈(4)的内环壁之间设置有弹簧三(422),所述弹簧三(422)套装在滑柱(421)的外壁上,每个所述转动块(42)的外壁上均开设有滑槽(423),所述安装槽(125)的内壁上滑动插接有四个等距圆周分布的夹持块(5),每个所述夹持块(5)的外壁均焊接有滑杆(51),每个所述滑杆(51)均与滑槽(423)相适配,每个所述夹持块(5)的外壁上均焊接有凸块二(52),所述凸块二(52)与凸块一(41)相适配。
8.根据权利要求6所述的一种便于夹取的晶圆传送机械臂,其特征在于:所述拨杆(3)靠近带轮二(31)的一侧外壁上焊接有半齿轮二(34),所述料盒(12)的底部外壁上焊接有凸台(124),所述凸台(124)的外壁上转动插接有丝杆(6),所述丝杆(6)的外壁上焊接有传动齿轮(61),所述传动齿轮(61)与半齿轮二(34)相互啮合,所述半齿轮二(34)的直径大于传动齿轮(61)的直径,所述丝杆(6)的外壁上通过螺纹套装有上料架(62),所述上料架(62)滑动插接在料盒(12)内。
技术总结
本发明涉及半导体技术领域,具体涉及一种便于夹取的晶圆传送机械臂,包括底座,所述底座的外壁上通过螺栓连接有支座,所述支座的外壁上通过螺栓连接有电机,所述电机的主轴上焊接有悬臂,所述悬臂的端部外壁上焊接有电推杆,所述电推杆的输出端焊接有安装架。本发明中通过设置的限位柱和拦截块,使得避位槽内的晶圆能够进入限位柱之间,实现对晶圆的框选,限位柱端部的拦截块能够转动,从而能够将晶圆兜住,进而使得安装架能够携带晶圆进行转运,避免了传统吸盘吸附方式的一系列问题,通过设置的分片机构,使得转动块带动第一个晶圆相对第二个晶圆进行转动,使得晶圆之间出现间隙,避免晶圆之间吸附过紧而无法分开的情况。
技术研发人员:杜春辉,张晓星,冯建炜
受保护的技术使用者:苏州赛美达半导体科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!