制动电阻、制动电阻模块、伺服驱动器及机器人的制作方法
本技术涉及机器人,具体而言,涉及一种制动电阻、制动电阻模块、伺服驱动器及机器人。
背景技术:
1、工业机器人用伺服驱动器在设计选型时通常会搭配制动电阻,伺服电机在减速时因过大的负载惯量会变成发电机,此时伺服电机会反向给伺服驱动器供电,这就会造成伺服驱动器过压报警,为了释放这部分能量,通常会给伺服驱动器配置一块制动电阻(配置技巧为增大电阻功率,适当减小电阻阻值),以在伺服驱动器驱动伺服电机运行时进行减速,从而防止伺服驱动器减速过压,减小减速距离,提高动态性能。
2、工业机器人需根据伺服电机的选型选取不同功率、不同阻值、不同尺寸的制动电阻进行搭配,并安装到伺服驱动器上进行搭配使用。
3、但是,当制动电阻的技术参数如功率、阻值,功率、阻值等不同时,制动电阻的外形尺寸也是是不一样的,外形尺寸的不同影响了多个制动电阻的组装成本和效率,且由于制动电阻属于能耗制动,在使用时发热严重,还需搭配良好的散热环境。
技术实现思路
1、本实用新型的主要目的在于提供一种制动电阻、制动电阻模块、伺服驱动器及机器人,以解决现有技术中的制动电阻的外形尺寸的不同影响了多个制动电阻的组装成本和效率的问题。
2、为了实现上述目的,根据本实用新型的第一方面,提供了一种制动电阻,包括:电阻主体,电阻主体用于安装在制动电阻的待安装位置处;公续接触点和母续接触点,公续接触点设置在电阻主体的第一侧,母续接触点设置在电阻主体的第二侧;公续接触点相对于电阻主体的中心线的位置与母续接触点相对于电阻主体的中心线的位置均一致;其中,电阻主体上设置有用于供第一紧固件穿过的第一通孔。
3、进一步地,第一通孔的数量为多个,多个第一通孔间隔设置在电阻主体上。
4、进一步地,制动电阻还包括:防呆公头和防呆母头,防呆公头位于电阻主体的第一侧且与公续接触点间隔设置,防呆母头设置在电阻主体的第二侧且与母续接触点间隔设置;其中,防呆公头相对于电阻主体的中心线的位置与防呆母头相对于电阻主体的中心线的位置对应设置。
5、进一步地,电阻主体上设置有用于供散热气流通过的散热孔,公续接触点和母续接触点均位于散热孔的周侧。
6、进一步地,制动电阻包括连接块,设置在电阻主体上,电阻主体通过连接块与制动电阻的待安装位置处连接,连接块上设置有用于供第二紧固件穿过的第二通孔,第二紧固件穿过第二通孔后与待安装位置处连接。
7、进一步地,电阻主体的矩形板体,矩形板体包括沿自身中心线间隔设置的正面和反面以及环绕自身中心线一侧连接的四个侧面,四个侧面包括沿第一方向相对设置的两个第一侧面和沿第二方向相对设置的两个第二侧面;其中,连接块的数量为两个,两个连接块分别设置在两个第一侧面上,且两个连接块均位于相应的第一侧面的靠近同一个第二侧面的一侧。
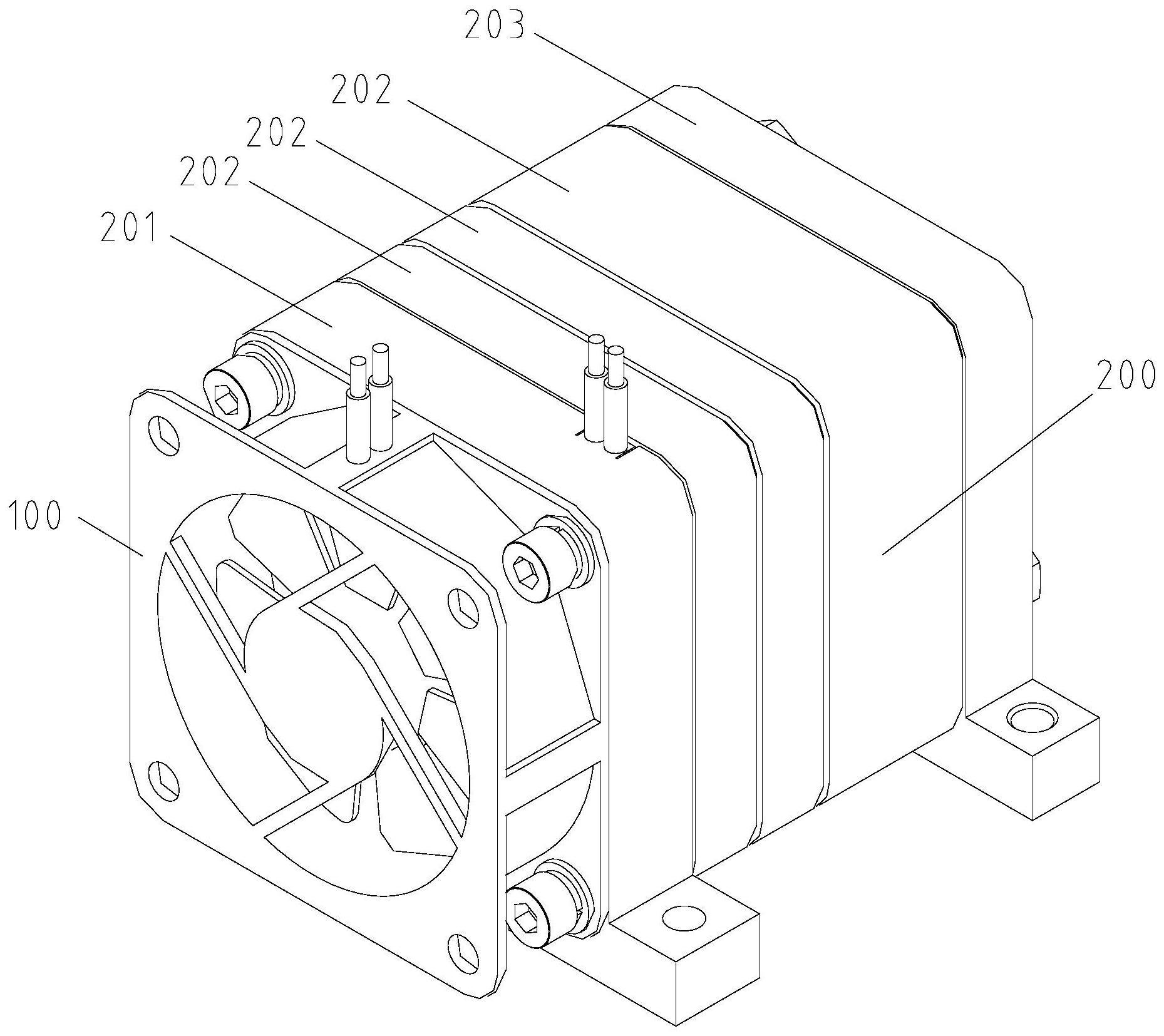
8、根据本实用新型的第二方面,提供了一种制动电阻模块,包括:散热风扇;制动电阻,制动电阻为上述的制动电阻,制动电阻与散热风扇之间通过第一紧固件可拆卸地连接。
9、进一步地,制动电阻的数量为多个,多个制动电阻沿远离散热风扇的方向依次设置;其中,各个制动电阻的公续接触点相对于相应的电阻主体的中心线的位置均一致;各个制动电阻的母续接触点相对于相应的电阻主体的中心线的位置均一致;各个制动电阻的第一通孔相对于相应的电阻主体的中心线的位置均一致。
10、根据本实用新型的第三方面,提供了一种伺服驱动器,其特征在于,包括驱动器主体和设置在驱动器主体上的制动电阻模块,制动电阻模块为上述的制动电阻模块。
11、根据本实用新型的第四方面,提供了一种机器人,其特征在于,包括上述的伺服驱动器。
12、应用本实用新型的技术方案,本实用新型的制动电阻包括:电阻主体,电阻主体用于安装在制动电阻的待安装位置处;公续接触点和母续接触点,公续接触点设置在电阻主体的第一侧,母续接触点设置在电阻主体的第二侧;公续接触点相对于电阻主体的中心线的位置与母续接触点相对于电阻主体的中心线的位置均一致;其中,电阻主体上设置有用于供第一紧固件穿过的第一通孔。这样,本实用新型通过将制动电阻设置为上述的结构,使得对制动电阻的选型更加地灵活,可以根据选型需要对多个制动电阻进行任意搭配组合,以更好的选取贴近实际需求的制动电阻,减少了元器件冗余带来的成本浪费,且多个制动电阻能够进行叠加组装,降低了不同尺寸的制动电阻独立布局带来的空间浪费,解决了现有技术中的制动电阻的外形尺寸的不同影响了多个制动电阻的组装成本和效率的问题。
技术特征:
1.一种制动电阻,其特征在于,包括:
2.根据权利要求1所述的制动电阻,其特征在于,所述第一通孔(4)的数量为多个,多个所述第一通孔(4)间隔设置在所述电阻主体(1)上。
3.根据权利要求1所述的制动电阻,其特征在于,所述制动电阻还包括:
4.根据权利要求1所述的制动电阻,其特征在于,电阻主体(1)上设置有用于供散热气流通过的散热孔(7),所述公续接触点(2)和所述母续接触点(3)均位于所述散热孔(7)的周侧。
5.根据权利要求1所述的制动电阻,其特征在于,所述制动电阻包括连接块(8),设置在电阻主体(1)上,所述电阻主体(1)通过所述连接块(8)与所述制动电阻的待安装位置处连接,所述连接块(8)上设置有用于供第二紧固件穿过的第二通孔(9),所述第二紧固件穿过所述第二通孔(9)后与所述待安装位置处连接。
6.根据权利要求5所述的制动电阻,其特征在于,所述电阻主体(1)的矩形板体,所述矩形板体包括沿自身中心线间隔设置的正面(11)和反面(12)以及环绕自身中心线一侧连接的四个侧面,所述四个侧面包括沿第一方向相对设置的两个第一侧面(13)和沿第二方向相对设置的两个第二侧面(14);其中,所述连接块(8)的数量为两个,两个所述连接块(8)分别设置在所述两个第一侧面(13)上,且两个所述连接块(8)均位于相应的所述第一侧面(13)的靠近同一个所述第二侧面(14)的一侧。
7.一种制动电阻模块,其特征在于,包括:
8.根据权利要求7所述的制动电阻模块,其特征在于,所述制动电阻(200)的数量为多个,多个所述制动电阻(200)沿远离所述散热风扇(100)的方向依次设置;其中,
9.一种伺服驱动器,其特征在于,包括驱动器主体和设置在所述驱动器主体上的制动电阻模块,所述制动电阻模块为权利要求7或8所述的制动电阻模块。
10.一种机器人,其特征在于,包括权利要求9所述的伺服驱动器。
技术总结
本技术提供了一种制动电阻、制动电阻模块、伺服驱动器及机器人,制动电阻包括:电阻主体,电阻主体用于安装在制动电阻的待安装位置处;公续接触点和母续接触点,公续接触点设置在电阻主体的第一侧,母续接触点设置在电阻主体的第二侧;公续接触点相对于电阻主体的中心线的位置与母续接触点相对于电阻主体的中心线的位置均一致;其中,电阻主体上设置有用于供第一紧固件穿过的第一通孔,以解决现有技术中的制动电阻的外形尺寸的不同影响了多个制动电阻的组装成本和效率的问题。
技术研发人员:徐晓应,黄建威,杨文堂,高小云,张志波
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!