一种基于GIS定位的输电线路巡检机器人的制作方法
一种基于gis定位的输电线路巡检机器人
技术领域
1.本实用新型涉及巡检机器人技术领域,具体为一种基于gis定位的输电线路巡检机器人。
背景技术:
2.随着科技的不断发展,新产品的不断升级,人们的生活环境发生了巨大变化,即使是在互联网时代,我们仍然对电力有着日益增长的需求。目前,架空输电线路是电力输送的主要手段,不可避免地,架空输电线路长期在户外经受风吹日晒和雨雪的侵蚀,很容易出现线路破损、老化等情况,如果不能及时发现问题,将会造成电力输送的中断,从而给用电者带来巨大的不便和损失。因此,对架空输电线路进行定期巡检和排查变得十分重要。
3.目前,对架空输电线路巡查主要是通过巡检机器人巡查,巡检机器人主要包括悬挂式机器人和无人机两类。悬挂式机器人悬挂在架空线上,通过滚动或者攀爬的方式进行线路巡检。
4.目前的输电线路巡检机器人内部多装有gis定位器,用于与监控中心通信,获取巡检机器人的位置和巡检机器人周围地理面貌,但是目前的gis定位器大多是通过螺栓固定设置在巡检机器人的控制箱内,不便于gis定位器拆装。
技术实现要素:
5.本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
6.鉴于上述和/或现有巡检机器人中存在的问题,提出了本实用新型。
7.因此,本实用新型的目的是提供一种基于gis定位的输电线路巡检机器人,方便gis定位器的安装和拆卸。
8.为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
9.一种基于gis定位的输电线路巡检机器人,其包括:
10.巡检机器人本体,其具有搭载在输电线路上并沿着输电线路移动的驱动轮,其控制箱的底部开设安装槽,所述安装槽内对称设置有第一连接块,所述第一连接块相视的一侧壁开设第一贯穿孔;
11.定位器,设置在安装槽内,其一侧壁对称设置有第二连接块,所述第二连接块相视的一侧壁开设第二贯穿孔,所述第二连接块与所述第一连接块一一对应的对接,且所述第二贯穿孔与所述第一贯穿孔同轴心;
12.卡插固定组件,位于两个所述第一连接块之间,其包括对称设置的限位柱和位于两个所述限位柱之间并呈压缩状态的弹性件;
13.其中,所述限位柱插入至所述第一贯穿孔内,并延伸至所述第二贯穿孔内,将所述第一连接块与所述第二连接块锁定。
14.作为本实用新型所述的一种基于gis定位的输电线路巡检机器人的一种优选方案,其中,还包括可拆卸的设置在所述巡检机器人本体的底部并将所述安装槽封闭的密封盖板。
15.作为本实用新型所述的一种基于gis定位的输电线路巡检机器人的一种优选方案,其中,所述限位柱上开设有手指插槽。
16.作为本实用新型所述的一种基于gis定位的输电线路巡检机器人的一种优选方案,其中,所述弹性件为弹簧。
17.作为本实用新型所述的一种基于gis定位的输电线路巡检机器人的一种优选方案,其中,所述第二贯穿孔的孔径大于所述第一贯穿孔的孔径。
18.与现有技术相比,本实用新型具有的有益效果是:通过在巡检机器人本体的底部开设安装槽并设置相互对称的第一连接块,在gis定位器上设置与第一连接块对应的第二连接块,通过卡插固定组件的限位柱插入至第一连接块的第一贯穿孔内,并通过压缩的弹簧的复原推力将限位柱推送至第二连接块的第二贯穿孔内,将gis定位器固定在安装槽内,当拆卸时,使两个限位柱相向移动,使限位柱从第二连接块的第二贯穿孔内退出。解决了传统gis 定位器拆装不便的问题。
附图说明
19.为了更清楚地说明本实用新型实施方式的技术方案,下面将将结合附图和详细实施方式对本实用新型进行详细说明,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
20.图1为本实用新型一种基于gis定位的输电线路巡检机器人一方向的结构示意图;
21.图2为本实用新型一种基于gis定位的输电线路巡检机器人另一方向的结构示意图;
22.图3为本实用新型一种基于gis定位的输电线路巡检机器人的整体结构爆炸图;
23.图4为本实用新型一种基于gis定位的输电线路巡检机器人的卡插固定组件结构示意图。
具体实施方式
24.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
25.其次,本实用新型结合示意图进行详细描述,在详述本实用新型实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本实用新型保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
27.本实用新型提供一种基于gis定位的输电线路巡检机器人,方便gis定位器的安装和拆卸。
28.图1
‑
图4示出的是本实用新型一种基于gis定位的输电线路巡检机器人一实施方式的结构示意图,请参阅图1
‑
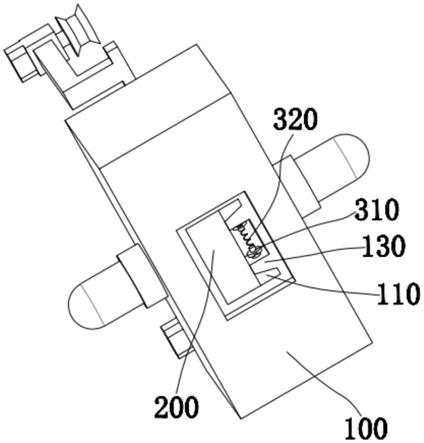
图4,本实施方式的一种基于gis定位的输电线路巡检机器人,其主体部分包括巡检机器人本体100、gis定位器 200和卡插固定组件300。
29.巡检机器人本体100具有搭载在输电线路上并沿着输电线路移动的驱动轮110,其控制箱的底部开设安装槽120,安装槽120内对称设置有第一连接块130,第一连接块130相视的一侧壁开设第一贯穿孔130a,第一连接块130 用于与gis定位器200上的第二连接块210对接,并使第一连接块130的第一贯穿孔130a与gis定位器200的第二连接块210上的第二贯穿孔210a同轴心。
30.gis定位器200设置在安装槽120内,用于与监控中心通信,获取输电线路巡检机器人的位置和周围的地理面貌,gis定位器200一侧壁对称设置有第二连接块210,第二连接块210相视的一侧壁开设第二贯穿孔210a,第二连接块210与第一连接块130一一对应的对接,且第二贯穿孔210a与第一贯穿孔130a同轴心。作为优选,在本实施方式中,第二贯穿孔210a的孔径大于第一贯穿孔130a的孔径。
31.卡插固定组件300位于两个第一连接块130之间,其包括对称设置的限位柱310和位于两个限位柱310之间并呈压缩状态的弹性件320,限位柱310 插入至第一贯穿孔130a内,并延伸至第二贯穿孔210a内,将第一连接块130 与第二连接块210锁定。作为优选,在本实施方式中,弹性件320为弹簧。
32.结合图1
‑
图4,本实施方式的一种基于gis定位的输电线路巡检机器人,通过在巡检机器人本体100的底部开设安装槽120,并设置相互对称的第一连接130,在gis定位器上200设置与第一连接块130对应的第二连接块210,并且gis定位器上200放置在安装槽120内,第一连接块130与第二连接块 210对接,通过卡插固定组件300的限位柱310插入至第一连接块130的第一贯穿孔130a内,并通过压缩的弹性件320的弹性复原推力将限位柱310推送至第二连接块210的第二贯穿孔210a内,进而将gis定位器200固定在安装槽120内,当需要将gis定位器上200从安装槽120内拆除时,捏动限位柱 310,使两个限位柱310相向移动压缩弹性件320,直至限位柱310从第二连接块210的第二贯穿孔210a内脱出即可。
33.进一步的,在本实施方式中,还包括密封盖板,封盖板可拆卸的设置在巡检机器人本体100的底部,将安装槽120封闭。而且限位柱310上开设有手指插槽310a,在对gis定位器200拆装时,维修人员的手指可以插入至手指插槽310a内,方便移动限位柱310。
34.虽然在上文中已经参考实施方式对本实用新型进行了描述,然而在不脱离本实用新型的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本实用新型所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本实用新型并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1