方位角或极向磁通机器的制作方法
1.本发明总体上涉及电机,并且尤其涉及可变磁阻机器。
背景技术:
2.电机的概念是众所周知的,并且在19世纪后期发明的第一类电机(比如,感应式机器和同步式机器)在现今的工业中仍是非常重要的。电动机器总体上包括一个可移动部分(典型地但不限于转子或转换器)和一个第二部分(典型地但不限于定子)。这些部分被气隙分开,该气隙将可移动部分与第二部分分开。这些部分中的至少一个部分(典型地定子)还具有可以承载电流的电绕组。
3.电动机器的特征在于,与机械系统(比如,齿轮箱、液压系统和气动系统)相比,它们具有低的力或转矩密度,但是具有高的功率密度,因为它们可以在高速下运行。1kw/kg的功率密度是电动机的代表性数字。
4.大多数电机的特征还在于,如果忽略绕组中的涡电流,则电阻功率损耗(其通常构成电动机器中的大部分损耗)独立于气隙速度v。然而,以总功率的百分比来计,电阻功率损耗变得与1/v成比例,因为总功率与v成比例。因此,一般电动机器典型地在10
‑
100m/s的高速下具有高效率,其中90%
‑
98%的范围内的效率是常见的。在低速(例如,低于5m/s)下,电机典型地具有较低的效率。
5.而且,电阻损耗典型地在电动机器中产生热力问题,并且限制转矩和力密度以及超过几秒的操作的功率密度。
6.由于低的力或转矩密度以及不良的低速效率,在需要高的转矩或力以及低速的应用中,电动机器通常与齿轮箱、液压系统或气动系统结合使用。这使得电动机器能够以高速和低转矩运行。然而,这些机械系统具有某些缺点。机械转化在系统中产生额外的损耗,其取决于系统典型地为3%
‑
20%并且在部分负载中甚至更高。与电机本身相比,机械转化系统还在更大程度上需要维护,这可能增加总成本。作为示例,对于风力,齿轮箱的维护问题在过去20年间一直是连续性的大问题。
7.为了应对低速效率问题和低力密度问题,已经提出并开发了属于被称为可变磁阻机器(vrm)和特别是可变磁阻永磁机器(vrpm)的机器系列的多种不同的机器类型。这些机器类型(例如,游标机器(vm)、游标混合机器(vhm)以及横向磁通机器(tfm)的不同变体)实现了被称为磁传动的几何效果,该几何效果通过使绕组更短和更厚而大幅降低了绕组电阻。这是通过以下方式来实现的:将几何结构布置成使得来自若干邻近极的磁通沿相同方向行进,并且使得来自这些极的磁通在可移动部分(即,转换器或转子)移动一个极长时切换方向。
8.这些机器还发展出了比其他机器更高的剪切应力,其中剪切应力被限定为每单位气隙面积的有用剪切力。然而,与标准机器相比,它们总体上不会大大增加每单位体积中填装的气隙面积的量,因此尽管这些机器的力密度增加,但它仅是适度的。这些机器类型的众所周知的问题是漏磁通量变大,并且功率因数在满负载时变低。由此,它们不能同时具有高
功率因数和非常高的剪切应力。尽管已经针对风力提出了它们,但是由于这些缺点,它们尚未达到广泛普及的市场渗透率。
9.在参考文献[1
‑
4]中已经提出了一种类型的tfm机器。这种机器具有的优点是,它确实以每单位体积相当大的气隙面积填装。然而,该机器看起来像被一分为二的变压器,并且在每相多达两个巨大线圈中具有远离气隙的线圈。不幸的是,这种设计也具有一些微小的缺点。所提出的设计给出了大的漏磁通量,这导致了低的功率因数。而且,它具有大的夹合磁法向力,这需要强大的机械结构来保持芯部。这是由于以下事实:线圈仅围绕两个结构缠绕,并且这两个结构远离空气间隙中的一些空气间隙来定位。
[0010]
现有技术的电机的问题在于,在低速应用中以及在需要高的力或转矩密度的应用中,目前的解决方案不能达到非常高的转矩或力密度,并且最转矩密集的机器在满负载时具有低的功率因数。这导致大且昂贵的直接驱动机器,其通常具有相当大的损耗。
技术实现要素:
[0011]
因此,所提出的技术的总体目的是提供具有改善的总体转矩或力密度和增加的低速效率的电机。
[0012]
上述目的是通过根据独立权利要求所述的设备来实现的。在从属权利要求中限定了优选实施例。
[0013]
总而言之,在第一方面中,一种通过切换磁通量来运行的电机包括第一磁结构、第二磁结构和绕组。该第一磁结构和该第二磁结构被布置成沿着预定运动路径相对于彼此能够移动。该第一磁结构和该第二磁结构沿着垂直于该预定运动路径的闭合路径具有相应的区段,这些相应的区段经由平行于该预定运动路径的多于4个空气间隙来彼此交错。每个区段被限定为相应的磁结构的如沿着该闭合路径的方向来看位于面向该多于4个空气间隙中的两个连续空气间隙的区段表面之间的部分。对于这些磁结构的每个区段,磁场线穿过这些区段表面之间的磁性材料。该第一磁结构在每个空气间隙处沿平行于该预定运动路径的方向呈现可变磁导率。该第二磁结构在每个空气间隙处沿平行于该预定运动路径的方向呈现可变磁导率、永磁极和/或包括超导材料的磁极。被确定为该第一磁结构的区段的可变磁导率的连续最大值之间的平均距离的第一平均距离在35%内等于第二平均距离,该第二平均距离被确定为该第二磁结构的相邻区段的可变磁导率的连续最大值之间的平均距离或者被确定为该第二磁结构的该相邻区段的相同极性的连续磁极之间的平均距离。对于该多于4个空气间隙中的每个空气间隙,在至少一个运行相处的至少一个位置处,在气隙处垂直于该区段表面的磁通量密度的分量的平均值大于垂直于该区段表面的磁通量密度的分量的绝对值的平均值的15%。这些平均值是在均匀磁通距离上取得的,其中该均匀磁通距离是沿该预定运动路径的方向沿着相应的空气间隙的该第一平均距离的整数倍、大于3倍。对于这些磁结构的这些区段中的至少三个区段,该绕组具有相应的环,该相应的环是沿该预定运动路径的方向对于至少该均匀磁通距离围绕相应的区段设置的、或者沿着整个闭合的所述预定运动路径沿着相应的区段设置的。
[0014]
在第二方面中,一种系统包括根据第一方面的电机。该系统是可再生能量转化系统、风力发电厂、海浪发电厂、电动船舶推进系统、无齿轮电动机、直接驱动系统或力密集致动器。
[0015]
所提出的技术的一个优点是其增加了机器的力或转矩密度并且增加了机器的尤其是低速下的效率。当阅读具体实施方式时,将了解其他优点。
附图说明
[0016]
通过参考结合附图的以下描述,可以最好地理解本发明及其进一步的目的和优点,在附图中:
[0017]
图1a是通过切换磁通量来运行的电机的实施例的图示;
[0018]
图1b是部分剖去的图1a的实施例的视图;
[0019]
图1c至图1d是第二磁结构的实施例的示意性图示;
[0020]
图1e至图1f是第一磁结构的实施例的示意性图示;
[0021]
图1g至图1h是第一磁结构与第二磁结构之间的几何关系和磁关系的实施例的示意性图示;
[0022]
图2a至图2d是第一磁结构与第二磁结构之间的几何关系的实施例的示意性图示;
[0023]
图3是气隙中的磁通量的示意性图示;
[0024]
图4是展示变化的空气间隙磁通量的示例的图;
[0025]
图5是第二磁结构和相关联的绕组环的实施例的截面的示意性图示;
[0026]
图6是方位角或极向磁通机器的实施例的截面视图;
[0027]
图7是方位角或极向磁通机器的另一个实施例的截面视图;
[0028]
图8是方位角或极向磁通机器的又另一个实施例的截面视图;
[0029]
图9是利用表面安装的永磁体的第一磁结构与第二磁结构之间的几何关系的实施例的示意性图示;
[0030]
图10是在切换磁阻机器中的第一磁结构与第二磁结构之间的几何关系的实施例的示意性图示;
[0031]
图11是极向磁通机器的实施例的部分的示意性图示;
[0032]
图12是部分剖去的极向磁通机器的第一磁结构和第二磁结构以及绕组的实施例的部分的示意性图示;
[0033]
图13是部分剖去的旋转机器的实施例的示意性图示;
[0034]
图14是部分剖去的极向磁通机器的第一磁结构和第二磁结构以及绕组的另一个实施例的部分的示意性图示;以及
[0035]
图15是电机中的轴承放置的实施例的示意性图示。
具体实施方式
[0036]
在所有附图中,相同的附图标记用于相似或对应的元件。
[0037]
在此提出的技术通过具有极高的转矩或力密度、甚至在低速下的非常高的效率并且通过保持合适的功率因数来提供对于电机的总体转矩或力密度问题和低速效率问题两者的优质的解决方案。这是通过优选地考虑三个不同的方面来实现的。这些概念进而将给出框架,设计和几何特征必须遵循在这些框架内。
[0038]
绕组电阻通常是主要的缺点。为了具有许多分之一的绕组电阻,在此提出的技术实现所谓的磁传动。这个概念意味着绕组不是在每个单独的极之间缠绕的而是围绕许多极
来缠绕的。典型地,整个相被环绕成简单的环。由此,绕组可以变得比标准机器短若干倍。同时,绕组也可以被制造得厚若干倍。这进而使得绕组电阻是标准机器的许多分之一。取决于几何结构和尺寸,绕组电阻可以通过这样的措施来减小约1/100至1/5的因数。这也大幅减少了热力问题。
[0039]
要考虑的另一个概念是在尽可能小的体积中增加气隙的数量。换言之,由于机器的力是在空气间隙中发展的,所以努力增加一定机器体积内的总空气间隙面积。在此提出的技术实现了一种几何结构,该几何结构将许多气隙磁性地串联、紧密地包封在一起连接成优选地产生磁性闭环的几何结构。这优选地在比如铁等磁性材料块中没有不必要的长磁场线路径的情况下实现。在此提出的几何布置通过减少对于磁通量的磁性材料的任何被动返回路径来实现这一点。由此,与标准电机相比,在此提出的机器中每单位体积中可以填装更多倍的空气间隙面积。此外,这是在不使用过量的永磁体的情况下实现的。
[0040]
这与绕组中减小的电阻相结合还允许在电动机器中显著更高的电流负载。这意味着剪切应力(即,在气隙中发展的每单位面积的有用力)变成标准机器中的2
‑
4倍高。甚至高达100kn/m2的每单位面积的力也是可行的。与标准机器相比,当许多气隙由于磁传动被紧密地包封在一起时,剪切应力的增益变得甚至更大,因为标准机器在这方面具有不利的缩放比例。这与每单位体积或重量的气隙面积的显著增加相结合,给予在此提出的技术与标准机器相比大许多倍、典型地10
‑
25倍的力或转矩密度。
[0041]
这种几何结构的另一个效果是,它优选地可以被布置成使得可以局部地(至少理想地)消除气隙处的磁性材料上的法向力,这显著地减少了对重且庞大的结构材料的需要。在现有技术的电机中通常也执行对磁性材料上的法向力的消除,但典型地是在全局意义上执行的。这因此需要将法向力从机器的一侧载送到另一侧的内部结构。然而,在此提出的局部意义上的法向力消除是极其有利的。在此提出的技术大幅减少了对稳健的内部结构的需要。
[0042]
一些优选实施例的进一步的益处是消除了漏磁通量。通过以分布方式围绕至少三个区段布置绕组,一相的整个绕组类似于闭合或几乎闭合的线圈几何结构。这种几何结构可以是环形线圈或类似的形状。通过具有这样的几何结构,可以显著地减少或几乎消除漏磁通量。为此目的,在机器的这些实施例中的绕组以几乎消除全局漏磁通量的方式布置。由此,机器的功率因数可以维持在合理的水平,而不减小剪切应力,并且在优选实施例中可以达到0.8。而且,这样的几何关系减少了绕组中和机械结构中的涡电流以及电钢片中的平面涡电流的问题。
[0043]
本发明优选地涉及一种类型的电机,该电机利用几何效果来大幅增加机器的力或转矩密度并且增加机器的尤其是低速下的效率,并且在优选的情况下不影响功率因数。在此提出的技术在低速应用(比如,直接驱动)中以及在需要高的力或转矩密度的应用(但不限于此)中具有前所未有的性能。合适的应用是风力、潮汐力和海浪力(即,可再生能量)转化系统、电动船舶推进、齿轮电动机的替代、直接驱动应用和力密集致动器,但是本发明不限于此并且还可以用于许多其他的应用。本发明可以被实现为线性电机或旋转电机,但不限于此。
[0044]
在本披露内容中使用的一些术语可能需要明确的限定。
[0045]“电机”应被解释为当施加电流时可以在可移动本体上施加力的机器,或反之亦
然。典型地,电机用作发电机、电动机或致动器。
[0046]“气隙”或“空气间隙”典型地填充有空气,但不限于此,并且可以包括任何非磁性材料,比如,气体、液体、滑动轴承材料(比如,特氟纶等)。
[0047]“非磁性”在此应被解释为在0.2特斯拉的磁通量密度b下具有<50的相对磁导率并且具有<0.2特斯拉的剩余磁通密度的材料。进一步地,“磁性”在此应被解释为在0.2特斯拉的磁通量密度b或>=0.2特斯拉的剩余磁通密度下具有>=50的相对磁导率的材料。
[0048]
机械功率可以表示为p=fv,其中f是力,并且v是速度。
[0049]“速度”在此被限定为可移动部分与第二部分之间的相对速度。该速度是在将这两个部分分开的气隙处的这两个部分的相应表面处限定的。
[0050]“力”在此被限定为由可移动部分与第二部分之间的由电流施加的相对力。力是在分开这两个部分的气隙处的这两个部分的对应表面处并且沿着移动取得的,使得该力在这些表面处变成剪切力。
[0051]“法向力”在此被限定为在可移动部分与第二部分之间的气隙处的吸引法向力。
[0052]
在此提出的技术的几何结构被布置成实现磁传动,使得磁通量在简单的绕组环内部是单向的或几乎单向的。这个绕组环典型地是矩形绕组环,其在至少均匀磁通距离上包围磁通量,如以下进一步讨论的。应注意,这与同步电机中的分布式绕组(其中磁通不是单向的)不同。
[0053]
由此,连同实现磁传动的机器的类型(比如,游标机器(vm)、游标混合机器(vhm)、横向磁通机器(tfm)以及切换磁阻机器(srm))一起,本发明属于可变磁阻电机系列。这些机器实现了低电阻,但是没有达到与本发明一样高的力或转矩密度,因为它们没有磁性地串联连接许多气隙,并且由此没有如本发明那样以每单位体积大的气隙面积填装,而是仅达其若干分之一。而且,这些机器没有以与本发明相同的程度避免漏磁通量,并由此具有更多的涡电流问题和更低的功率因数。这些机器在局部意义上也不以在此提出的技术相同的程度上抵消磁法向力。由此,它们对于相同量的转矩需要更多的结构材料,这使得它们更重且更昂贵。
[0054]
轴向磁通同步电动机器(afm)是一种众所周知的同步机器,其中磁通量沿轴向方向布置。在少数情况下,已经提出,轴向磁通机器可以用许多磁性地串联的气隙来运行,这些气隙可以增加其转矩密度。然而,afm并不具有与本发明所具有的几乎一样低的绕组电阻,因为它不实现磁传动,并且因此不能同时达到高效率和高转矩密度,因为它不能在空气间隙中产生相同的剪切应力。进一步地,afm不能像本发明那样以每单位体积尽可能多的气隙面积填装,因为当磁极被制造得更短时,与本发明相比,afm的绕组电阻具有不利的缩放比例。与没有实现磁传动的任何电机(包括具有或不具有永磁体、感应式机器和同步磁阻机器、或其组合的带铁芯的和带空气芯的同步电动机器)相比,所描述的这些特征给予本发明在相结合的效率和力或转矩密度方面显著更好的性能。
[0055]
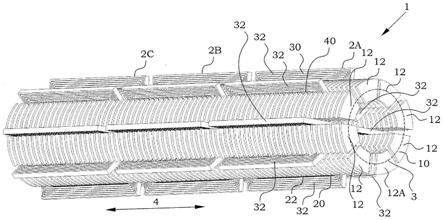
图1a展示了通过切换磁通量来运行的电机1的实施例。这个实施例是三相机器,其中不同的相2a、2b和2c彼此前后定位。每一相原则上独立于彼此运行并且它们仅机械地连接至彼此。电机1包括第一磁结构10,在这个实施例中,该第一磁结构被划分成八个区段12。电机1进一步包括具有多个环32的绕组30。在这个实施例中,在环32内部,存在第二磁结构20。在这个实施例中,第二磁结构20被划分成八个区段22(在图中仅可略微观察到其中一
个)。移除了机械结构部分,以便使得能够看到第一磁结构10和第二磁结构20以及绕组30。
[0056]
第一磁结构10和第二磁结构20被布置成可沿着预定运动路径4相对于彼此移动,在本实施例中,该预定运动路径是线性路径。第一磁结构10和第二磁结构20的区段12、22经由空气间隙40面向彼此放置,在图中仅对一个空气间隙进行编号。空气间隙40平行于预定运动路径4。闭合路径3可以垂直于运动路径4来限定。沿着这样的闭合路径3,第一磁结构10和第二磁结构20因此具有经由空气间隙40彼此交错的相应的区段12、22。换言之,当沿着闭合路径3通过时,第一磁结构10的区段12之后是由空气间隙40分开的第二磁结构20的区段22。同样,当沿着闭合路径3通过时,第二磁结构20的区段22之后是由空气间隙40分开的第一磁结构10的区段12。因此,在第二磁结构的每对区段22之间存在第一磁结构20的区段12,并且类似地在第二磁结构的每对区段12之间存在第一磁结构10的区段22。
[0057]
预定运动路径4涉及第一磁结构10与第二磁结构20之间的相对运动。这样的预定运动路径4可以例如被限定为第一磁结构10处的固定点相对于第二磁结构20处的固定点的运动。当然,也可以使用相反的限定,其限定为第二磁结构20处的固定点相对于第一磁结构10处的固定点的运动。由于该运动是相对运动,所以预定运动路径4在空间中不具有任何限定的位置,而是在所附附图中在移动部分的附近指示。即使预定运动路径4没有在绝对坐标中限定,但也在现实世界中很好地限定了预定运动路径4的方向。
[0058]
每个区段12、22因此可以被限定为相应的磁结构10、20的一部分,该部分位于沿着闭合路径3的方向的面向空气间隙40中的两个连续空气间隙的区段表面之间。
[0059]
在图1b中,示出了图1a的电机1的截断相2的图示。在此,第二磁结构20的区段22是直接可见的。为了增加图的可读性,仅对一个区段12、22和一个空气间隙40进行编号。在此可以看到,第二磁结构20的区段22位于沿着闭合路径3的方向的面向空气间隙40中的两个连续空气间隙的区段表面24、26之间。而且,第一磁结构10的区段12位于沿着闭合路径3的方向的面向空气间隙40中的两个连续空气间隙的区段表面14、16之间。
[0060]
此外,对于磁结构10、20的每个区段12、22,磁场线穿过区段表面14、16、24、26之间的磁性材料。这意味着在这个实施例16中,许多空气间隙40磁性地串联连接。此外,这些区段产生磁性闭环。空气间隙40相对紧密地填装在一起,并且在磁性材料块中不存在非常长的磁场线路径。
[0061]
可以通过进一步增加交错的区段的数量来甚至进一步地增强这些特性。目前,认为必须存在多于4个空气间隙以便实现明显的优点。使用多于6个空气间隙实现了更显著的优点。最优选地,提供多于10个空气间隙,并且为了得到真正的力密集或转矩密集的机器,优选地提供多于14个空气间隙。
[0062]
如图1a和图1b中可以看到的,沿着预定运动路径4还存在区段12、22的不同结构。这将结合图1c至图1f更详细地讨论。然而,应注意到第一磁结构10沿预定运动路径4的方向相对于第二磁结构20是可移动的,因为空气间隙40平行于该第二磁结构。
[0063]
在图1c中,如从空气间隙来看,展示了区段表面24中的一个区段表面的一部分。第二磁结构20的区段22包括与电钢片25的块或任何其他高导磁材料(被称为高导磁材料的第二部分23)交错的永磁体27a、27b的堆叠。使用标注“第二”是因为这些部分被设置在第二磁结构20内。电钢片25典型地阻止沿预定运动路径4的方向的涡电流。高导磁材料的第二部分23良好地传导磁场,并且由于永磁体沿预定运动路径4的方向以交变极性定位,高导磁材料
的第二部分23中的每第二者将呈现磁北极n,而其他者将呈现磁南极s。高导磁材料的第二部分23将充当磁通量集中结构。因此,在这个实施例中,沿平行于预定运动路径4的方向,在每个空气间隙处,第二磁结构20呈现永磁极n、s。
[0064]“高导磁材料”在本披露内容中被限定为在多于0.2特斯拉的磁通量密度下具有多于50的相对磁导率的材料。
[0065]
例如,可以用作与永磁体交错的块的、或者在如以下进一步讨论的使用电钢片描述的其他设计中使用的另一种高导磁材料例如是软磁性复合物(smc)。这些材料包括烧结成最终形状的具有电绝缘涂层的铁颗粒。这些材料可以沿所有方向传导磁通量,而不展现出任何重要的涡电流。
[0066]
由双箭头展示了第二磁结构20的相同极性的连续磁极之间的平均距离21。在这个特定实施例中,相同极性的连续磁极之间的所有距离是相同的,并且于是也与其平均值相同。然而,在替代实施例中,永磁体可以被设置成稍微移位,这意味着相同极性的连续磁极之间的距离可以稍微变化,然而,总是存在平均值。
[0067]
在图1d中,沿径向方向展示了与图1c中的区段22相同的部分。在此,可以容易地看到区段表面24和26。所指示的路径42展示了磁场线可以如何穿过区段表面24、26之间的磁性材料的一个示例,该磁性材料包括永磁体27a、27b和高导磁材料的第二部分23。换言之,区段表面24和26彼此磁性连接。
[0068]
因此,在一个实施例中,第二磁结构20的区段22中的至少一个区段包括永磁体27a、27b,这些永磁体被布置成沿着面向空气间隙的表面24、26呈现交替的极。
[0069]
在进一步的实施例中,包括永磁体27a、27b的第二磁结构20的每个区段22沿预定运动路径4的方向包括堆叠。这些堆叠包括由高导磁材料的第二部分23(即,在此为电钢片25的块)分开的永磁体27a、27b,其交替磁化方向平行于预定运动路径4。由此,第二周期性(即,平均距离21)等于每两个永磁体之间的距离。
[0070]
在图1e中,如从空气间隙来看,展示了区段表面14中的一个区段表面的一部分。第一磁结构10的区段12包括与定距块17交错的电钢片15或其他高导磁材料的块的堆叠。电钢片15的块良好地传导磁场,因此在区段表面14处呈现高磁导率。然而,如在这个实施例中,定距块17被设置在距空气间隙一定距离处,或者由非磁性材料制成。因此,定距块17在区段表面14处(即,面向空气间隙)呈现低磁导率。因此,沿平行于预定运动路径4的方向,在每个空气间隙处,第一磁结构10呈现可变磁导率。
[0071]
在这个实施例中,第一磁结构10的每个区段12包括堆叠,这些堆叠包括高导磁材料的第一部分13,在这种情况下为电钢片15的块。高导磁材料的第一部分13具有垂直于预定运动路径4的主要延伸。高导磁材料的第一部分13由非磁性材料或狭缝(即,定距块17或不存在材料)分开。因此,第一周期性等于两个连续的高导磁材料的第一部分13之间的距离。
[0072]
由双箭头展示了第一磁结构10的所述可变磁导率的连续最大值之间的平均距离11。在这个特定实施例中,第一磁结构10的可变磁导率的连续最大值之间的所有距离是相同的,并且于是也与其平均值相同。然而,在替代实施例中,高导磁材料的第一部分13可以被设置成稍微移位,这意味着第一磁结构10的所述可变磁导率的最大值之间的距离可以稍微变化,然而,总是存在平均值。
[0073]
在图1f中,沿径向方向展示了与图1e中的区段12相同的部分。在此,可以容易地看到区段表面14和16。所指示的路径42展示了磁场线可以如何穿过区段表面14、16之间的磁性材料的一个示例,该磁性材料包括高导磁材料的第一部分13。换言之,区段表面14和16彼此磁性连接。
[0074]
第一磁结构与第二磁结构之间的关系也是重要的。图1g示意性地展示了沿着垂直于预定运动路径4的闭合路径的一部分的第一磁结构10和第二磁结构20的一些区段12、22。在此,容易看到第一磁结构10的区段12和第二磁结构20的区段22的交替外观。空气间隙40将区段12、22彼此分开。在此,还可以看到,第一磁结构10的区段12的磁性部分能够传导来自第二磁结构20的区段22的磁极的磁场。因此,可以主要沿着虚线箭头44传导磁通量。在此可以注意到,所展示的磁通量沿相同方向(即,在图中向左)通过每个空气间隙40。
[0075]
图1h示意性地展示了当第一磁结构10和第二磁结构20已经沿预定运动路径4的方向相对于彼此位移了等于平均距离11的一半的距离时,图1g的第一磁结构10和第二磁结构20的区段12、22。磁通量的情况现在完全改变。现在,磁通量的路径沿图的向右方向,如虚线箭头45所展示的。在每个空气间隙40中,磁通量现在已经改变了其方向。
[0076]
在图1g和图1h中可以注意到,通过将第一磁结构10的距离11适配为等于第二磁结构20的距离21来实现在每个时刻在所有空气间隙上具有沿相同方向的磁通量的效果。为了实现磁通量的最大改变,这些平均距离应该是相同的。然而,人们可以偏离这种需求,牺牲部分的剪切应力和效率,并仍然具有可运行的机器。例如,有可能在平均距离上提供微小的偏差,例如以减小力波动和所谓的嵌齿效果,从而减小振动并且促进电动机的启动。还可以使用所谓的倾斜,其中第一磁结构10或第二磁结构20中的磁性材料倾斜,使得它们沿预定运动路径的方向相对于彼此呈现角度。
[0077]
在图2a至图2d中,示意性地展示了沿预定运动路径4的方向具有不同周期性的第一磁结构10和第二磁结构20的一些实施例。在图2a中,由平均距离11表示的第一磁结构10的周期性略微不同于由平均距离21表示的第二磁结构20的周期性。然而,差异仍然足够小以实现总的构造操作。在图2b中,两个磁结构的平均周期性相同,然而,第一磁结构10在连续结构重复之间具有不同的单独距离11’和11”。在图2c中,替代地,第二磁结构20具有不同的单独距离21’和21”。在图2d中,两个磁结构10、20在它们相应的结构重复之间具有不同的单独距离,并且甚至在平均距离11、21上具有小的差异。其他构型当然也是可能的。
[0078]
在具有弯曲的预定运动路径的实施例中,相对于曲率,在外侧上的磁结构可以具有不同的平均距离11、21,如以下将进一步讨论的。然而,对于第一磁结构的每个区段,总是存在第二磁结构的相邻区段,从而呈现落入以上在此讨论的限度内的平均距离。
[0079]
目前认为平均距离的这种偏差不应超过35%。换言之,被确定为第一磁结构的区段的可变磁导率的连续最大值之间的平均距离的第一平均距离在35%内等于第二平均距离,该第二平均距离被确定为第二磁结构的相邻区段的相同极性的连续磁极之间的平均距离。优选地,平均距离应保持尽可能地彼此接近。因此,在优选实施例中,第一磁结构和第二磁结构的平均距离之间的偏差不应超过30%、更优选地不超过20%、并且最优选地不超过10%。
[0080]
在限定可变磁导率的最大值时,预期考虑重复结构的总体变化。在这方面,可能引起小的局部最大值、不影响空气间隙外部的总体能量转化的微小的微观波动不被认为是最
大值。同样,给出小范围磁导率的波动并且对空气间隙外部的能量转化没有贡献的其他微小结构将被忽略。据信,宽度小于最宽主要最大值的20%的宽度的局部最大值对于机器的运行是较不重要的,并且在限定最大值之间的平均距离时应被忽略。
[0081]
同样,如果周期性被缺失的主要最大值中断,并且连续的主要最大值之间的距离于是变成双倍距离,则运行特性将稍微降级,但是在大多数情况下仍将是有用的。在限定最大值之间的平均距离时,在其他重复结构中的这种省略的最大值也应被忽略。
[0082]
因此,当前披露的技术基于空气间隙上的磁通量取决于两个磁结构之间的相对位置而改变量值和方向的基本原理。在理想情况下,忽略不想要的漏磁通,空气间隙上的所有磁通量在每个时刻都指向相同的方向。因此,该机器是利用磁通切换的机器。在本披露内容中,利用磁通切换的机器被限定为通过切换磁通量来运行的电机,并且由此实现所谓的磁传动。
[0083]
在研究图1a至图1h的特定实施例时,可以首先看到,在这个实施例中,预定运动路径是线性路径。还可以得出结论:机器由于沿方位角方向的磁通量改变来运行,并且这种类型的机器因此可以优选地被表示为方位角磁通切换机器。
[0084]
在理想世界中,当第一磁结构10的高导磁材料的第一部分13与第二磁结构20的高导磁材料的第二部分23对齐时,所有磁通量通过空气间隙40进入相反的区段中。然而,在现实世界中,总是存在漏磁通量。因此,一些磁通量将总是再次沿相反的方向在空气间隙40上泄漏回去。然而,通过仔细的设计,至少在磁结构对齐时,大部分磁通量将指向相同的方向。如果增加了这大部分,则将总体上增加在此提出的技术的效率、剪切应力和功率因数。
[0085]
图3示意性地展示了这些限定。第二磁结构20沿着面向空气间隙40的表面24呈现交替的磁极。箭头43展示了从北极通至南极的磁通量。一些(优选地大多数)磁通量经由第一磁结构10通至下一个第二磁结构20。这是在此提出的技术中用于实现机器的运行的磁通量,即,有用磁通量。应注意,这个图示中的空气间隙40显著夸张以便增加该图的可读性。然而,一些磁通量泄漏回到同一第二磁结构20而不通过任何第一磁结构10。如果考虑表面24处或靠近该表面的情况,如由虚线49所指示的,磁通量向外(即,向图中的右侧)通过。在当前情况下,五个箭头43离开第二磁结构20的每个北极,与线49相交。同时,磁通量也向内(即,向图中的左侧)通过。在当前情况下,两个箭头43到达第二磁结构20的每个南极,与线49相交。
[0086]
为了实现明显的优点,已估计最小限度是当沿一个方向的磁通量超过沿相反方向的磁通量约三分之一时。为了以适当的方式量化这一点,可以限定两个综合量度。在第一量度中,对进入或离开表面24的所有磁通量垂直于表面24的分量(包括其方向)进行平均。在图3中,由于来自每个北极的两个箭头返回到相邻的南极,它们在这样的平均中将彼此抵消。仅对应于穿过第一磁结构10的三个箭头的磁通将对平均值做出贡献,即,对于磁通切换机器的“有用”或净磁通量。在第二量度中,再次对进入或离开表面24的磁通量进行平均,但现在忽略方向。换言之,垂直于区段表面的磁通量密度的分量的绝对值用于进行平均。这给出了沿任一方向通过气隙的总磁通量的量度。通过考虑第一量度(即,有用磁通量)与第二量度(即,总磁通量)之间的比率,可以确定“有用”磁通量的相对量。如以上所提及的,沿一个方向的磁通量超过沿相反方向的磁通量约三分之一似乎是经历优点的下限。使用上述两个综合量度的比率,这对应于约0.15。实现了具有至少0.20的比率的更显著的优点。甚至更
优选具有至少0.25的比率,并且甚至更优选具有至少0.30的比率。最优选地,比率是至少0.40。
[0087]
由于磁通切换机器的基本理念是在气隙上具有随着第一磁结构与第二磁结构之间的相对位置而变化的磁通量,所以这种平均应当对于空气间隙40的长度的相当大的一部分是有效的。这对于多个连续的磁极和/或可变磁导率的最大值也应该是这种情况。换言之,这个条件应当存在于空气间隙沿着预定运动路径4的连续通过中。它还可以表达为,在沿着空气间隙40的至少几个极周期内应提供共同指向的“有用”磁通量。存在非磁通切换机器的不同示例,这些非磁通切换机器可以在空气间隙上局部地具有均匀指向的磁通量,但在包括若干磁极周期的距离上不具有均匀指向的磁通量。还应该在全部数量的极对上取得平均。因此,应该沿预定运动路径4的方向的多于三个极对的距离上取得上述平均。在图3中,箭头41指示极对距离的平均值的四倍的平均距离。因此目前相信,超过第一磁结构10的可变磁导率的连续最大值之间的平均距离11的整数倍(至少三倍)的平均值确保了真正的磁通切换基本设计。因此,进行平均的距离应该是磁结构的周期性的整数倍,以便具有有意义的比率来讨论。否则,周期内的磁通差异可能影响该比率,这是不预期的。
[0088]
还应注意到,有用磁通量与返回到同一磁结构的磁通量之间的关系可以在设备上变化。例如,更有可能的是,沿预定运动路径的方向,有用磁通量在磁结构的端部处比在磁结构的中部更低。以上进一步讨论的磁结构内设置的距离偏差也可能改变从一个位置到另一个位置的有用磁通量的比率。因此,以上讨论的条件旨在呈现于空气间隙中的至少一个位置处,例如,靠近磁结构的中部和/或靠近在磁结构的元件之间具有重复距离的部分。
[0089]
还应注意到,有用磁通量与返回到同一磁结构的磁通量之间的关系可以在运行相上变化。当第一磁结构和第二磁结构的变化结构彼此配准时(例如,如图1g和图1h中所展示的),认为有用磁通量非常高。然而,在中间相对位置中(即,在其他运行相中),情况可以不同。因此,以上关于磁通比率的讨论旨在至少对于一个运行相是有效的,例如,当有用磁通量被最大化时。
[0090]
换言之,对于空气间隙40中的每个空气间隙,在至少一个运行相处的至少一个位置处,在气隙40处垂直于该区段表面的磁通量密度的分量的平均值大于垂直于该区段表面的磁通量密度的分量的绝对值的平均值的15%,其中,这些平均值是在均匀磁通距离上取得的,其中,均匀磁通距离是沿预定运动路径4的方向沿着相应的空气间隙40的第一平均距离11的整数倍、大于3倍。为了实现高性能,优选的是这些条件存在于机器的尽可能大的部分中。因此,在优选实施例中,对于沿预定运动路径4的方向沿着相应的空气间隙40的第一平均距离11的多于5倍、甚至更优选地多于9倍并且最优选地多于15倍的均匀磁通距离,这种关系同样成立。
[0091]
如以上简要提及的,可以局部地消除气隙处的磁性材料上的法向力。从一侧的来自第一磁结构10的第二磁结构20上的力理想地通过相反侧上的来自第一磁结构10的相等力来补偿。类似地,除了(取决于几何结构)垂直于所述闭合路径3的易于机械处理的小的力分量之外,从一侧的来自第二磁结构20的第一磁结构10上的力通过相反侧上的来自第二磁结构20的相等力来补偿。这些力因此平衡,这显著地减少了对重且庞大的结构材料的需要。在现实世界中,将总是存在与完美几何结构的偏差,并且根据恩绍定理,这些偏差将产生不抵消的法向力。然而,这些力具有小得多的量值并且典型地由轴承处理。在此呈现的局部意
义上的法向力消除早先尚未以这种方式使用。
[0092]
因此,跨气隙的磁通量将在改变第一磁结构10和第二磁结构20沿着预定运动路径4的相对位移时改变。这在图4中示意性地展示。磁通量的这种变化同时出现在所有空气间隙以及第一磁结构10和第二磁结构20两者的所有区段中。通过将绕组30布置成环绕此可变磁通量,可以实现电机的运行。
[0093]
图5展示了具有环32(即,多个匝)的绕组30的实施例,这些环围绕第二磁结构20的区段22设置,使得绕组围绕区段22制成一个或多个匝。图4的变化的磁通量也将呈现于第二磁结构20的区段22上。环32总体上平行于预定运动路径4(即,横向于闭合路径)延伸,该闭合路径在这个实施例中垂直于图中的纸平面指向。换言之,环32沿预定运动路径4的方向具有其主要延伸。为了从磁通量的基本上均匀的方向获益以相对于被转化的功率量来减小绕组电阻,有益的是使这些环沿着预定运动路径4环绕多个磁极距离(即,在相同极性的连续磁极之间的距离)。为了实现明显的优点,目前认为应该由至少一个单个环32环绕至少三个磁极距离。然而,由单个环环绕的第二磁结构20的区段22越多,总共需要的绕组材料就越少,并且与所转化的功率相关的电阻损耗可能就越低。在图5中,环绕了15个磁极对。
[0094]
在一个实施例中,绕组是不垂直于预定运动路径来围绕第一磁结构的多于两个区段或第二磁结构的多于两个区段缠绕的。
[0095]
在进一步的实施例中,绕组的环是环绕导磁材料的第一部分中的多个连续的第一部分平行于预定运动路径缠绕的。
[0096]
磁传动的概念是通过如下方式使用的:绕组不是在每个单独的极之间缠绕的而是围绕许多极来缠绕的。这应对了当极被制造得更短时绕组变得更长且更薄的问题,其限制了标准机器的低速性能。典型地,整个相被环绕成简单的环,这意味着绕组可以保持非常短。典型地,环具有矩形或类似的形状。而且,由于存在大量可用空间并且由于对于短绕组而言其成本不那么高,绕组可以被制造得厚若干倍。总之,这使得绕组电阻是标准机器的许多分之一。
[0097]
如以下将进一步讨论的,绕组30也可以围绕第一磁性区段来设置。换言之,绕组具有沿预定运动路径的方向以至少上述均匀磁通距离围绕相应区段设置的环。
[0098]
此外,为了防止磁通泄漏出结构,有益的是提供围绕这些区段中的若干区段的环。这将在以下更详细地讨论。据信,可以通过围绕磁结构的区段中的至少三个区段具有环来实现效果。由环来环绕的区段越多,每单位重量可利用的功率就越多并且漏磁通量将越低。优选地,环围绕磁结构的区段中的至少四个区段、更优选地至少六个区段并且最优选地至少八个区段来设置。在图1a的实施例中,存在围绕所有八个区段的环。
[0099]
如果电机作为发电机来运行,则第一磁结构10和第二磁结构20被迫相对于彼此移动,从而在绕组30的环32中感生电压。同样,如果电机作为电动机来运行,则穿过绕组30的环32的变化的电流将引起第一磁结构10与第二磁结构20之间的力,从而产生相对运动。
[0100]
因此,在一个实施例中,电机是发电机。第一磁结构与第二磁结构的相对运动在绕组中产生感生的交流电压。
[0101]
在另一个实施例中,电机是电动机。穿过绕组传导的交流电流引起第一磁结构与第二磁结构的相对运动。
[0102]
迄今为止,仅讨论了第一磁结构与第二磁结构之间的相对运动。这可以通过许多
不同的方式来获得。
[0103]
在一个实施例中,第一磁结构是定子。换言之,第一磁结构被机械地附接到机器的固定支撑部分。第二磁结构则被布置成相对于定子(即,也相对于机器的支撑部分)可移动。在线性预定运动路径的情况下,第二磁结构因此变为转换器。
[0104]
在另一个实施例中,情况是相反的。第二磁结构是定子。换言之,第二磁结构被机械地附接到机器的固定支撑部分。第一磁结构则被布置成相对于定子(即,也相对于机器的支撑部分)可移动。在线性预定运动路径的情况下,第一磁结构因此变为转换器。
[0105]
在又另一个实施例中,第一磁结构和第二磁结构两者可以相对于机器的固定支撑部分可移动。
[0106]
在此提出的几何结构磁性地串联连接许多空气间隙。这典型地产生区段的几何上的闭环,即使这个闭环不是绝对要求。如果要实现磁传动,则存在穿过气隙的大的单向磁通量。由于磁通量密度是无发散的,所以磁通量不能消散,但必须或多或少继续地进入闭环。由此,如果这些区段本身不形成环,则必须添加其他磁性材料块以提供此功能。由于磁通大,这些磁性材料块中的磁场线路径将变得长。优选的是避免空气间隙之间的磁性材料块(比如,铁)中不必要的长磁场线路径,因为这些块不提供力或功率,而仅提供额外的质量、额外的损耗和额外的成本。这些理念的一个结果是,绕组的环可以围绕第一磁结构和/或第二磁结构的磁场线未给出相反方向的区段来放置。换言之,磁场线在围绕连续区段的环之间典型地不会非常大地改变其方向。在图1a至图1h的实施例中,由环来环绕的八个区段包围相对于其相邻环指向45
°
的磁场线。这些理念增大了实现大量空气间隙以及促进减少漏磁场的可能性。
[0107]
因此,在一个实施例中,通过两个连续的相应环的磁场线在这两个连续的环的位置之间改变的方向小于150度、并且优选地不多于120度、并且最优选地不多于90度。
[0108]
图6展示了垂直于图1的磁通切换电机1的预定运动路径的截面。在这个实施例中,它被实现为具有圆形布局以及磁通集中磁体结构。如可以看到的,绕组30由于其环32而类似于稀疏环形线圈。理想的环形线圈根本没有漏磁通。在这个实施例中,稀疏环形线圈绕组继承了这些特性中的一些特性,并由此全局漏磁通变得非常小。围绕环形形状的环的数量的增加将减小漏磁通,并同时减小连续的空气间隙之间的距离。
[0109]
因此,在机器中的绕组以几乎消除全局漏磁通量的方式布置。由此,机器的功率因数可以维持在合理的水平,而不减小剪切应力。在优选实施例中可以达到0.8的功率因数。而且,这样的几何关系减少了绕组中和机械结构中的涡电流以及电钢片中的平面涡电流的问题。
[0110]
本技术因此利用几何效果来增加机器的力或转矩密度并且增加机器的效率。这在低速时变得特别明显。在优选实施例中,甚至可以在不影响功率因数的情况下实现这一点。因此,在此提出的技术在低速应用(比如,直接驱动)中以及在需要高的力或转矩密度的应用中具有前所未有的性能。然而,本技术不限于此。合适的应用是一般的可再生能量转化系统,例如,风力或海浪力、电动船舶推进、齿轮电动机的替代、直接驱动应用和力密集致动器。然而,本技术不限于此,并且还可以用于许多其他的应用。
[0111]
然而,具有圆形截面的设计对机械结构及其安装提出了一些要求,尤其是对于在预定运动路径4中引入了破坏圆柱形对称性的曲率的旋转机器。为了实现对于制造和安装
而言有吸引力的设计,磁特性的一些牺牲对于实现更容易构建的设计可能是有意义的。
[0112]
图7中展示了一个替代方案。这种设计基于直的构建块,其中第二磁结构20的区段22与第一磁结构10的区段12a交错。第一磁结构10的两个端部区段12b则将组件连接到磁性闭环中,从而呈现闭合路径3。在这种结构中,第一磁结构10的区段12a被绕组的环32包围。
[0113]
这个实施例更容易生产和安装,但是在磁行为方面具有一些缺点。首先,即使图的上部或下部中的对齐区段的环包围具有相同方向的场线,端部区段12b的任一侧上的环反而包围方向改变了180度的场线,这不是最佳的。这将不可避免地引起一些漏场。这些非最佳特性的缺点必须与仅安装直块的益处相关。
[0114]
图8是替代性实施例。在此,第二磁结构20的两个附加区段22b已被添加到结构的侧边。这些区段22b交错在第一磁结构10的两个角区段12c之间。在这个实施例中,磁场线在结构中的任何地方都不改变方向超过90度,这改善了磁性行为。然而,附加区段22b反而增加了安装和构造的复杂性。
[0115]
在以上的实施例中,已经展示了用作磁通量集中结构的与高导磁材料的第二部分23交错的永磁体27a、27b的堆叠。换言之,第二磁结构的每个区段包括永磁体27a、27b,这些永磁体被布置成沿着面向空气间隙40的表面24、26呈现交替的极,由此第二周期性等于相同极性的两个连续极之间的距离。优选地,绕组的环是环绕多个连续的第二磁性材料片平行于预定运动路径来缠绕的。然而,磁场的提供也可以通过其他构型来提供。
[0116]
图9示意性地展示了具有表面安装的磁体的线性横向磁通机器的截面视图。这呈现了沿平行于第二磁结构20的预定运动路径4的方向沿着空气间隙40提供永磁极的替代方式。第二磁结构20在此包括具有磁性材料的中央本体29的区段22。在中央本体29的表面处设置有表面安装的磁体27c。通过这样的设计,区段22的相反侧上的极性可以不同,这意味着第一磁结构10的区段12可以被安装成沿预定运动路径4的方向没有位移。然而,由于在垂直于预定运动路径4的表面安装的磁体27c上存在磁力,所以必须存在用于确保表面安装的磁体27c的安全安装的装置。
[0117]
在替代性实施例中,第二磁结构在每个空气间隙处沿平行于所述预定运动路径的方向呈现包括超导材料的磁极。这些极则由超导材料形成的绕组提供,其具有环。这个实施例具有的优点在于,可以在第二磁结构中不使用铁的情况下实现显著更高的磁通量密度。缺点在于,该解决方案更昂贵并且它需要低温恒温器系统来将超导绕组冷却到超导温度。
[0118]
在又另一个替代方案中,可以采用切换磁阻机器设计。图10展示了这样的方法中的第一磁结构10与第二磁结构20之间的关系。第二磁结构20在此包括高导磁材料的第二部分23,例如,电钢片25的块。它们被设置有与第一磁结构10的高导磁材料的第一部分13基本上相同的周期性。同样在此,可以应用与以上进一步讨论的周期性之间的精确匹配的偏差。第二磁结构20因此在每个空气间隙处沿平行于预定运动路径的方向呈现可变磁导率。
[0119]
在切换磁阻的实施例中的力是通过第一磁结构10中的磁性材料与第二磁结构20的磁性材料(当它们未对齐并且被绕组中的电流磁化时)之间的简单吸引来产生的。这个力可以沿任一方向,这取决于第一磁结构10与第二磁结构20之间的相对位置。由此,切换磁阻的实施例的一个相只能在电周期的一半(四个中的两个象限)内沿期望的方向产生力,并且在其他两个象限期间保持无源。这对于机器类型来说是一个缺点,该机器类型直接使平均力密度减半并且使所需相数加倍。而且,力总体上低于永磁体的实施例,这是另一个缺点,
并且功率因数和效率更低。然而,切换磁阻的实施例的优点在于,在该实施例中不存在昂贵的永磁体,这降低了材料成本并且不会产生对用于制造这种单元的比如钕和镝等永磁体材料的可用性的依赖性。进一步地,当绕组中不存在电流时,在第一磁结构10与第二磁结构20之间不存在吸引力。由此,制造和组装变得显著地更不复杂。
[0120]
因此,在一个实施例中,第二磁结构的区段中的至少一个区段包括导磁材料的第二部分的堆叠,优选地具有垂直于预定运动路径、被非磁性材料或狭缝分开的主要延伸,其中第二平均距离被确定为连续的导磁材料的第二部分之间的平均距离。
[0121]
在进一步的实施例中,绕组的环是环绕导磁材料的第二部分中的多个连续的第二部分平行于预定运动路径缠绕的。
[0122]
可以注意到,在一些实施例中,切换磁阻方法可以与磁化磁结构结合。为此目的,第二磁结构的一些区段可以为磁阻切换类型,如以上在此所述,而第二磁结构的其他区段可以具有基于磁体的结构,例如,根据结合图1a至图9描述的实施例中的任一个。
[0123]
迄今为止,仅讨论了线性预定运动路径。然而,还可以针对弯曲的预定运动路径(例如,旋转机器)利用上述理念。
[0124]
对于旋转机器,以上讨论的大多数原理仍然有效。主要差异是预定运动路径的形状。第一磁结构和第二磁结构必须被成形为与预定运动路径相同的主要形状。这意味着,如果预定运动路径是圆形路径,则磁结构也必须是圆形的或被形成为圆形区段。
[0125]
图11展示了根据以上呈现的理念的旋转机器的一个实施例。展示了圆形预定运动路径4。具有主要环形形状的第一磁结构10存在区段12,该区段具有沿预定运动路径4的方向设置的多个高导磁材料的第一部分13。在这个实施例中,旋转电机1具有六个相2a
‑
f,并且取决于不同相的第一磁结构10之间的详细位移,机器可以是一相、二相、三相或六相机器。在主要环形形状的外部和内部看到绕组的多个环32。在这个视图中看不到第二磁结构。
[0126]
如以上简要提及的,与在外侧处的区段相比,在曲率的内侧(即,面对旋转机器的中心)的区段12、22沿着预定运动路径在磁结构10、20的磁性行为的重复之间的平均距离略微更小。然而,典型地,相邻区段仍然落入以上讨论的20%差异范围内。
[0127]
图12是图11的实施例的剖切图示的一部分。在此,可以看到存在“跑道形的”截面。长边相应地包括第一磁结构10和第二磁结构20的交替区段12a、22。在“跑道”的端部处,第一磁结构10的半圆形区段12d将磁路径闭合成闭合路径。绕组的环32被设置在“跑道”的外部和内部处(即,在闭合的磁性部分的内部和外部),由支撑定距块分开。环32延伸以包围第二磁结构20的属于机器的相的部分。
[0128]
在研究图11至图12的特定实施例时,可以首先看到,在这个实施例中,预定运动路径是圆形路径或至少其一部分。可以进一步注意到,在这个旋转机器中,跨过气隙40的磁通量指向极向方向。因为机器由于沿着极向方向的磁通量改变来运行,这种类型的机器因此可以优选地被表示为极向磁通切换机器。
[0129]
因此,在一个实施例中,预定运动路径是圆弧路径,由此电机是极向磁通机器。
[0130]
图13呈现了旋转机器的另一个实施例,其中为了清楚起见已经移除了结构材料。展示了圆形预定运动路径4。具有主要环形形状的第一磁结构10存在区段12,该区段具有沿预定运动路径4的方向设置的多个高导磁材料的第一部分13。大于一的任意数量的相沿着预定运动路径4分布,在这个特定图示中为3相2a
‑
c。在这个实施例中,围绕第二磁结构20的
区段22设置绕组的一个或多个环32,该一个或多个环对于每一相串联或并联地连接或以其组合连接。第一磁结构的两个带齿区段12e磁性地连接各相并且闭合机器的磁回路。
[0131]
在旋转机器中,移动的磁结构通常被称为转子。因此,在一个实施例中,第二磁结构是转子。在另一个实施例中,第一磁结构是转子。
[0132]
具有跑道截面几何结构的这种极向磁通切换机器的几何结构在避免漏磁通方面不如具有以上进一步呈现的圆形几何结构的方位角磁通切换机器好。然而,如早先所讨论的,该几何结构反而是制造起来较不复杂。
[0133]
如本领域的技术人员所认识到的,用于线性机器的任何几何结构也可以转移到旋转机器上。然而,由于额外的曲率,如果要求最佳的磁性行为,则制造和安装对于旋转机器而言将典型地甚至更麻烦。
[0134]
在仅具有一个相的旋转机器中,绕组可以以某种程度上特殊的方式来设置。这在图14中进行了展示。在这个实施例中,绕组30被设置为环绕整个旋转机器(磁路径内部)的一个单个环。绕组30的环在此沿着沿整个闭合的预定运动路径4的区段设置。
[0135]
这个实施例具有更短的绕组的优点,因为不需要返回绕组,这于是减少了一个特定实施例的传导损耗。缺点在于,每个相都需要一个实施例,并且需要至少两个或优选地三个分开的环形部来产生通常必需的恒定转矩。由此,每个导体环形部磁化较少的材料并产生较小的力,这使得电阻损耗的减小较不显著。而且,需要更多的轴承,并且功率因数将更低,因为在气隙外部的环形部绕组内部将存在漏磁通。
[0136]
本发明的总体挑战是准确地维持气隙。在图14中所展示的本发明的一个实施例中,这通过具有位于气隙40处或甚至位于气隙40中的轴承60来实现,该轴承相对于第二磁结构20的区段22来定位第一磁结构10的区段12。由此,无需支撑第一磁结构10的区段12和第二磁结构20的区段22的大的刚性结构,就可以维持气隙40,并且相应的区段可以保持分开。这种解决方案不是标准的,至少对于旋转机器(其中通常存在靠近转子的旋转轴线定位的轴承)不是标准的。轴承可以是任何类型的,比如,滚珠轴承、滚柱轴承、履带滚柱、流体轴承、滑动轴承等。
[0137]
图15示出了具有用于轴承60的替代位置的气隙40,其中轴承被放置在一定距离内。在60a处,轴承被放置在气隙外部,但是在气隙宽度距离61内。气隙宽度距离61是气隙沿垂直于预定运动路径和闭合路径两者的方向的宽度。在60b处,轴承位于气隙中,这减轻了对区段12、22的机械刚度要求,但干扰了机器的电磁操作。在60c处,这些轴承中的一个轴承被移除,并且剩余的轴承被放置在气隙的中心附近。这减少了轴承的数量,但是对机器引入了更多的刚度要求。最后,在60d处,大部分气隙或整个气隙被轴承覆盖。典型地,于是这是滑动轴承。总之,至少一个轴承60位于至少一个气隙40处或其附近,其中气隙40与轴承60之间的距离小于气隙40处的所述区段表面14、16、24、26的宽度61或优选地小于气隙40处的区段表面的宽度61的一半,其中宽度61是垂直于所述预定运动路径来取的。
[0138]
在所述预定运动路径具有曲率(这对于旋转机器而言是真实的)的实施例中,位于曲率内部的更靠近曲率中心的所述区段12、22的极长需要具有比位于更远离曲率中心的区段12、22更短的极长,以在相同频率下运行。由此,如果这些极具有所述区段表面的相同的所述宽度61,则这些极可以承载比位于更远离曲率中心的那些极更少的磁通量。这对于机器的性能可能是问题或轻微的缺点,因为力于是将变得更低并且漏磁通将变得更高。为了
对此进行补偿,对于更靠近曲率中心的区段,可以将区段的区段宽度61制造得更大。最佳地,区段宽度61可以被选择为与曲率中心与区段(12,22)的中心之间的距离成反比,使得所有区段可以承载大致相同量的磁通。
[0139]
因为在此提出的技术在低速应用中具有非常优异的性能,在低速应用中使用根据先前描述的机器是有利的。最重要的应用可能是直接驱动发电机和电动机,但是以低于5m/s的特征速度运行的系统也被认为是特别合适的。特征速度被限定为第一磁结构与第二磁结构(例如,转换器与定子、或者转子与定子)之间的典型相对运动速度。合适的应用典型地是可再生能量转化系统、风力、潮汐力、海浪力、电动船舶推进、齿轮电动机的替代(即,无齿轮电动机、牵引电动机)、一般的直接驱动系统、以及力密集致动器。
[0140]
上述实施例应被理解为本发明的一些说明性示例。本领域技术人员将理解,在不脱离本发明的范围的情况下,可以对实施例进行各种修改、组合和改变。具体地,在技术上可能的情况下,可以将不同实施例中的不同部分解决方案在其他配置中组合。然而,本发明的范围由所附权利要求限定。
[0141]
参考文献:
[0142]
[1]ep 3325800 a1
[0143]
[2]anders和erling guldbrandz
é
n。“a highly efficient and low
‑
cost linear tfm generator for wave power[用于波浪能的高效且低成本的线性tfm发电机]”ewtec 2017:第12届欧洲波浪能和潮汐能会议,2017年,8月27日至9月1日,爱尔兰科克郡。欧洲波浪能和潮汐能会议,2017年。
[0144]
[3]a.,2016年,“a low cost and highly efficient tfm generator for wave power[用于波浪能的低成本且高效的tfm发电机]”,第3届亚洲波浪能和潮汐能会议awtec,第822
‑
828页。
[0145]
[4]a.,2018年,“on the optimal pole width for direct drive linear wave power generators using ferrite magnets[关于使用铁氧体磁体的直接驱动线性波浪能发电机的最佳极宽]”,能源,11(6)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1