无人机坞站式无线充电装置及其向无人机无线供电的方法
1.本发明属于无线充电领域,涉及无人机充电,具体涉及无人机坞站式无线充电装置及其给无人机无线充电以及在无人区实现自主供电的方法。
背景技术:
2.随着社会的发展,无人机在诸多领域中扮演重要角色,尤其在巡检工作中,无人机能够在一些极端环境中代替人类作业,在一定程度上解放了人力;但是,由于无人机续航问题,目前无人机进行巡检作业仍然需要人力配合,在无人机完成作业后或无人机需要补充能源时,需要人力驱车对无人机进行释放及回收,以及能源的补充。显而易见,无人机的续航问题无疑使巡检工作效率大大下降,且未能从根本上解放人力。因此,需要研制一种无需人工操控,成本低、效率高的无人机无线充电装置,以此来解决上述存在的问题。
技术实现要素:
3.本发明的目的是针对现有技术的不足,设计一种可以在无人区对无人机实现精准定位,能够在无人区实现自主蓄电和供电的装置及其向无人机无线供电的方法,以满足巡检无人机的电能补充。
4.本发明无人机坞站式无线充电装置,包括无线充电模块、定位支撑模块和光伏发电模块。
5.所述的无线充电模块包括平面移动机构、转动机构和原边线圈;所述的平面移动机构包括滑块、滑轨、传动机构和步进电机;两根滑轨横向布置,另一根滑轨纵向布置;所述的两根横置滑轨与两个滑块分别构成滑动副;所述的纵置滑轨置于两根横置滑轨上端,且与两根横置滑轨上的滑块均固定;所述的纵置滑轨与另一个滑块构成滑动副;所述每个滑块与一个传动机构连接;所述两根横置滑轨上的传动机构通过传动轴连接,传动轴由一个步进电机驱动;所述纵置滑轨上的传动机构直接由另一个步进电机驱动;所述的转动机构包括舵机支架、舵机、码盘和线圈支架;所述的舵机支架固定在纵置滑轨上的滑块上;所述的舵机的底座固定在舵机支架上;所述的码盘与舵机的输出轴固定;所述的线圈支架固定在码盘上;所述的原边线圈固定在线圈支架上;所述的原边线圈经直流交流转换器与蓄电池连接,且原边线圈与主控制器电连接。
6.所述的定位支撑模块包括碳板平面、支撑框架、定位模块和加强筋;所述的支撑框架顶面设有横纵交错布置的若干加强筋;所述的加强筋两端均与支撑框架通过加强筋角件固定连接;所有加强筋分隔出若干定位区域,每个定位区域内设有一个定位模块,所述的定位模块包括线路板和霍尔元件;所述的线路板固定在加强筋上;多个霍尔元件阵列固定在线路板上,且各霍尔元件均与线路板电连接;所述的各定位模块的线路板均与主控制器电连接;所述的碳板平面置于各定位模块上方,并与支撑框架固定。
7.所述的光伏发电模块包括光伏发电板、偏转机构和俯仰机构;所述的俯仰机构包括光轴一、推杆电机、型材固定件一、型材固定件二、铰支座一、铰支座二、铰支座三、铰支座
四和型材固定件三;所述推杆电机的外壳、固定在型材固定件一一端的铰支座二和其中一个铰支座一通过光轴一铰接,构成复合铰链;所述推杆头固定在推杆电机的电机推杆上,并与固定在其中一根型材固定件二一端的铰支座三、固定在另一根型材固定件二一端的铰支座四构成复合铰链;所述的固定在其中一根型材固定件二另一端的铰支座三与固定在型材固定件一另一端的铰支座二铰接;所述的固定在另一根型材固定件二另一端的铰支座四与另一个铰支座一铰接;所述的两个铰支座一均固定在型材固定件三上。
8.所述的偏转机构包括光轴固定座、型材固定件四、轴承座安装板、圆柱齿轮一、圆柱齿轮二、型材固定件五、光轴二、光轴三和偏转电机;所述的光伏发电板固定在两个型材固定件四上,光伏发电板的电能输出端接蓄电池;所述的光轴三两端与两个型材固定件四分别通过光轴固定座固定,且光轴三与两个轴承座一分别构成转动副;所述轴承座一的两侧固定在两个型材固定件五上;所述的型材固定件五与型材固定件七通过偏转电机支架固定;所述的轴承座安装板固定在型材固定件七上;两个轴承座二固定在轴承座安装板上;所述的圆柱齿轮二固定在光轴二上;所述的光轴二与两个轴承座二均构成转动副,且光轴二一端与偏转电机的输出轴通过联轴器一相连;所述的偏转电机的底座固定在偏转电机支架上;所述的圆柱齿轮一固定在光轴三上,并与圆柱齿轮二啮合;所述的型材固定件七和两根型材固定件五均通过型材固定件六固定在型材固定件一上。
9.优选地,所述的传动机构包括同步带轮和同步带;铰接在横置滑轨或纵置滑轨两端的两个同步带轮通过同步带连接;所述两个横置滑轨同一端的同步带轮均固定在传动轴上;所述的传动轴与固定在其中一根横置滑轨上的步进电机的输出轴通过一个联轴器二连接;铰接在纵置滑轨上的其中一个同步带轮与固定在纵置滑轨上的步进电机的输出轴通过另一个联轴器二连接;所述步进电机的底座通过步进电机支架固定在纵置或横置滑轨上。
10.优选地,所述各滑轨的两端均固定有滑轨端子。
11.优选地,所述定位支撑模块的碳板平面倾斜设置。
12.优选地,所述的步进电机、舵机、偏转电机和推杆电机均由主控制器控制;所述的主控制器由蓄电池供电,蓄电池由光伏发电模块供电。
13.优选地,所述的光伏发电模块设有多个。
14.优选地,所述推杆电机的外壳与光轴一固定,光轴一一端通过两个深沟球轴承支承在铰支座一上,且光轴一另一端通过两个深沟球轴承支承铰支座二;光轴一两端靠近推杆电机的两个深沟球轴承与推杆电机的外壳之间、光轴一每一端的两个深沟球轴承之间以及位于光轴一两端的两个开口挡圈与对应端邻近的深沟球轴承之间均设有一个轴套。
15.本发明无人机坞站式无线充电装置向无人机无线供电的方法,具体如下:
16.待充电的无人机通过自身携带的北斗导航定位进行粗定位,降落在碳板平面上,搭载于无人机副边线圈两端的两个永磁铁分别被正下方定位模块的其中几个霍尔元件识别,主控制器根据霍尔元件传来的识别信号,确定两个永磁铁的具体位置,并根据两个永磁铁位置判断出副边线圈的朝向;然后,主控制器控制两根横置滑轨上的步进电机和纵置滑轨上的步进电机启动,各步进电机经传动机构带动对应的滑块移动,使得纵置滑轨沿着两根横置滑轨移动,且转动机构和原边线圈同步沿着纵置滑轨移动,将原边线圈定位到无人机所在位置,从而使得原边线圈位于待充电无人机的副边线圈下方,随后转动机构中的舵机驱动原边线圈水平旋转,使得原边线圈与副边线圈朝向一致、上下对齐;接着,使原边线
圈通电,对副边线圈进行无线充电。
17.优选地,所述的定位模块检测到无人机飞离,主控制器控制步进电机,带动转动机构和原边线圈回到初始位置。
18.优选地,在无人区通过光伏发电模块实现自主供电,具体过程如下:
19.第一步,上位机将地理位置信息发送给主控制器,主控制器根据地理位置在不同时刻下太阳位置,对偏转机构和俯仰机构进行调控,使得不同时刻下,光伏发电板都能与太阳光线保持垂直;
20.第二步,光伏发电板对太阳光线进行吸收及转化,使得太阳能转化为电能,并传给蓄电池储存。
21.本发明具有的有益效果是:
22.1、本发明通过多个定位模块中的霍尔元件实现无人机定位,并通过平面移动机构驱动转动机构横向和纵向移动至无人机的副边线圈下方,转动机构中的舵机驱动原边线圈水平旋转,使得原边线圈与副边线圈上下对齐;接着,使原边线圈通电,对副边线圈进行无线充电,能够准确对无人机进行定位,并准确实现原边线圈对准副边线圈进行无线充电。
23.2、本发明通过光伏发电板对太阳能进行收集、转化和储存,使得蓄电池能够在无人区实现自主供电,无需外部供电;而且,能够根据太阳方位调整光伏发电板的角度,使得光伏发电板与太阳光线时刻保持垂直,提高光伏发电板的发电效率,从而保证蓄电池的电能充足,能够很好地在无人区通过无线充电的方式为普适性的无人机提供电能。
附图说明
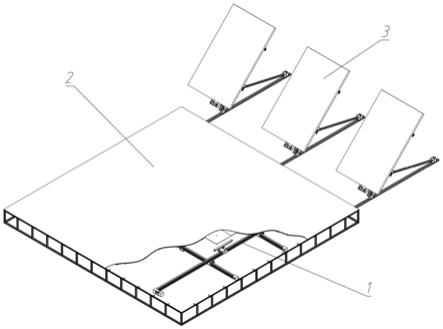
24.图1为本发明的整体结构示意图;
25.图2、3、4和5为本发明中无线充电模块的四幅结构示意图;
26.图6为本发明中原边线圈和转动机构的结构示意图;
27.图7为本发明中定位支撑模块的结构示意图;
28.图8为本发明中定位模块的局部放大示意图;
29.图9为本发明中光伏发电模块的结构示意图;
30.图10为本发明中偏转机构的结构示意图;
31.图11为本发明中偏转机构的局部放大示意图;
32.图12为本发明中推杆电机与光轴一的装配立体图;
33.图13为本发明中俯仰机构的结构示意图。
具体实施方式
34.下面结合附图及实例对本发明作进一步说明。
35.如图1所示,无人机坞站式无线充电装置,包括无线充电模块1、定位支撑模块2和光伏发电模块3。
36.如图2所示,无线充电模块1包括平面移动机构1-1、转动机构1-2和原边线圈1-3;如图3、4和5所示,平面移动机构1-1包括滑块1-1-1、滑轨1-1-2、传动机构和步进电机1-1-7;两根滑轨1-1-2横向布置,另一根滑轨1-1-2纵向布置;横置滑轨1-1-2底部与地脚1-1-5固定,地脚1-1-5与地面固定;两根横置滑轨与两个滑块1-1-1分别构成滑动副;纵置滑轨置
1-16上;圆柱齿轮一3-1-5固定在光轴三3-1-11上,并与圆柱齿轮二3-1-6啮合;型材固定件七3-1-9和两根型材固定件五3-1-7均通过型材固定件六3-1-8固定在型材固定件一3-2-8上,且型材固定件六3-1-8与型材固定件一3-2-8之间固定有型材角件3-3。
40.作为一个优选实施例,如图3、4和5所示,传动机构包括同步带轮和同步带1-1-4;铰接在横置滑轨1-1-2或纵置滑轨1-1-2两端的两个同步带轮通过同步带1-1-4连接;横置滑轨1-1-2一端的同步带轮固定在传动轴1-1-9上;传动轴1-1-9与固定在其中一根横置滑轨1-1-2上的步进电机1-1-7的输出轴通过一个联轴器二1-1-6连接;铰接在纵置滑轨1-1-2上的其中一个同步带轮与固定在纵置滑轨1-1-2上的步进电机1-1-7的输出轴通过另一个联轴器二1-1-6连接;步进电机1-1-7的底座通过步进电机支架1-1-8固定在纵置或横置滑轨1-1-2上。
41.作为一个优选实施例,如图3、4和5所示,各滑轨1-1-2的两端均固定有滑轨端子1-1-3。
42.作为一个优选实施例,定位支撑模块2的碳板平面2-1倾斜设置,以确保雨水、露水不会再表面聚积。
43.作为一个更优选实施例,步进电机1-1-7、舵机1-2-2、偏转电机3-1-15和推杆电机3-2-4均由主控制器控制;主控制器由蓄电池供电,蓄电池由光伏发电模块3供电。
44.作为一个优选实施例,如图1所示,光伏发电模块3设有多个。
45.作为一个优选实施例,如图12和13所示,推杆电机3-2-4的外壳与光轴一3-2-3固定,光轴一3-2-3一端通过两个深沟球轴承3-2-1支承在铰支座一3-2-10上,且光轴一3-2-3另一端通过两个深沟球轴承3-2-1支承铰支座二3-2-11;光轴一3-2-3两端靠近推杆电机3-2-4的两个深沟球轴承3-2-1与推杆电机3-2-4的外壳之间、光轴一3-2-3每一端的两个深沟球轴承3-2-1之间以及位于光轴一3-2-3两端的两个开口挡圈3-2-2与对应端邻近的深沟球轴承3-2-1之间均设有一个轴套3-2-7。
46.本发明无人机坞站式无线充电装置向无人机无线供电的方法,具体如下:
47.待充电的无人机通过自身携带的北斗导航定位进行粗定位,平稳降落在碳板平面2-1上,此时,搭载于无人机副边线圈两端的两个永磁铁分别被正下方定位模块2-3的其中几个霍尔元件2-3-4识别,主控制器根据霍尔元件2-3-4传来的识别信号,确定两个永磁铁的具体位置(每个永磁铁能通过几个霍尔元件2-3-4的信号强弱确定出所在位置),并根据两个永磁铁位置判断出副边线圈的朝向;然后,主控制器控制两根横置滑轨上的步进电机1-1-7和纵置滑轨上的步进电机1-1-7启动,各步进电机1-1-7经传动机构带动对应的滑块1-1-1移动,使得纵置滑轨沿着两根横置滑轨移动,且转动机构1-2和原边线圈1-3同步沿着纵置滑轨移动,将原边线圈1-3定位到无人机所在位置,从而使得原边线圈1-3位于待充电无人机的副边线圈下方,随后转动机构中的舵机驱动原边线圈水平旋转,使得原边线圈1-3与副边线圈朝向一致、上下对齐;接着,使原边线圈1-3通电,对副边线圈进行无线充电;当无人机充电完毕后,起飞继续执行任务。
48.作为一个优选实施例,定位模块2-3检测到无人机飞离,主控制器控制步进电机1-1-7,带动转动机构1-2和原边线圈1-3回到初始位置。
49.作为一个优选实施例,在无人区通过光伏发电模块3实现自主供电,具体过程如下:
50.第一步,上位机将地理位置信息发送给主控制器,主控制器根据地理位置在不同时刻下太阳位置,对偏转机构3-1和俯仰机构3-2进行调控,使得不同时刻下,光伏发电板3-1-1都能与太阳光线保持垂直;
51.第二步,光伏发电板3-1-1对太阳光线进行吸收及转化,使得太阳能转化为电能,并传给蓄电池储存。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1