能使桥式PWM电路驱动两臂实现平衡驱动的一种跟随式控制方法与电路结构与流程
能使桥式pwm电路驱动两臂实现平衡驱动的一种跟随式控制方法与电路结构
技术领域
1.能使桥式(含全桥式、半桥式与推挽式)电压型pwm(脉宽调节)电路驱动两臂实现平衡驱动,从而彻底解决偏磁问题的一种控制方法与电路结构。涉及桥式开关电源,尤其是其核心部件电压型pwm电路的使用性能的提升及电压型集成pwm电路的升级设计。
背景技术:
2.桥式开关电源,不仅能实现大功率电能的隔离传输,还能对功率、电压与电流三者的输出大小进行快速地大幅度地随机调节。它的控制原理是:利用pwm技术,依输出设定值与输出的实际值作运算比较之结果,对输出变压器初级的两臂驱动宽度进行调节而实现的。输出过大时,驱动宽度变小,反之驱动宽度增大,逐臂调节。由于是逐臂调节,当输出负载出现强烈变化时,逐臂调节极易进入无序状态,甚至会出现两臂自激震荡。其结果是造成两臂驱动不平衡,若不平衡向单一方向持续,会因偏磁积累产生变压器过偏磁,以至磁饱和。磁饱和会使变压器初级电感消失,当即造成开关电源的开关功率管因输出短路而损坏.。在桥式开关电源出现初期,因磁饱和造成的这种逆变颠覆现象是屡见不鲜的。二十年代初期,工程师们把电压型pwm电路应用到逆变焊机设备中。在开始的十来年中,逆变焊机的功率开关管屡见损坏,以至产品无法继续生产,众多企业因此而关停,主要也就是因两臂不平衡驱动而产生过偏磁造成的。可见、防止过偏磁是
‘’
解决桥式开关电源可靠性的关键问题。最近十几年,因采用了多种技术,逆变焊机的可靠性大为提高。如采用减小驱动脉宽占空比与提高空载电压的设计,并采用霍尔传感器作为取样器件。但这些都是权宜之计,没有从根本上解决问题,仅适合部分逆变焊机。如减小驱动脉宽占空比与提高空载电压的设计,会增大输出电压纹波系数值,而它又是稳压电源的一个重要技术指标。上述表明,彻底解决好过偏磁问题,至今仍还是桥式开关电源设计者关注的重大技术问题。发明专利93116941,0(功率开关管驱动信号的平衡控制装置)虽然提供一个彻底解决偏磁的电路设计,但由于它是采用四分频实现的,因而降低了调节频率及动特性,造成输出冲击过大,使用不甚理想。针对上述情况,本发明提供另一个既能彻底解决不平衡驱动问题,又能提高动特性,又不会造成过冲击的方法与电路设计,可满足各种用电压型pwm电路设计的桥式开关电源可靠使用的要求。发明方法
3.关键词定义,pwm电路:下文均为电压型pwm集成电路简称。
4.关键词定义,控制臂:桥式pwm电路输出二臂中之一臂,其驱动宽度由输入pwm 输入比较器控制端的外输入控制信号控制。
5.关键词定义,跟随臂:桥式pwm电路输出二臂中之另一臂,其驱动宽度由存储在存储电路中的控制臂脉宽电压信号设定并控制。
6.关键词定义,pwm快速开关信号:由pwm比较器取样输出,经闭锁处理的、内含臂与软启动控制信号的而末经pwm驱动功率放大的pwm开关信号。分为控制臂pwm快速开关信号
与跟随臂pwm快速开关信号。
7.关键词定义,pwm开关信号:pwm快速开关信号与pwm电路驱动信号的总称。
8.本发明方法,是能使桥式(含全桥式、半桥式与推挽式)pwm电路驱动两臂实现平衡驱动的一种跟随式控制方法,有六个要点,它们是:
9.要点一、将桥式pwm电路驱动两臂区分为控制臂与跟随臂。
10.要点二、将控制臂的脉宽电压信号进行快速取样存储,该脉宽电压信号是输入pwm 比较器控制端的控制电压信号,或者是输入pwm比较器三角波端的三角波电压信号,两者取一快速取样存储。
11.要点三、将存储的控制臂脉宽电压信号用于对随后的跟随臂的脉宽电压没定与控制。
12.要点四、对控制臂的脉宽电压信号进行快速存储的控制信号是控制臂pwm开关信号中的控制沿信号及之延续电平、即pwm快速开关信号或pwm电路驱动信号中的控制沿信号及之延续电平。
13.要点五、设计一个对控制臂脉宽电压信号取样、存储、转而用该存储的控制臂脉宽电压信号对之后跟随臂脉宽电压进行设定控制的时序循环控制电路。
14.要点六、根据不同的使用要求、特定使用场所、元器件特性及布线,选择增设附加电路,它们是:小脉宽箝位电路、前后两臂驱动脉宽误差的误差消除电路、存储器静电与漏电释放电路、防干扰电路、限流电路等。
15.要点六说明:在开关电源输出过载情况下,pwm电路会被正常关闭,驱动信号也即消失,这有可能会造成平衡控制失控。增设上述附加的小脉宽箝位电路,可以保证开关信号连续输出。若要排除该小脉宽对开关电源输出造成的影响,可以在驱动信号后续传输电路中增设一个与箝位脉宽相适应的前沿传输延迟电路,影响即可排除。
16.要点二说明:pwm电路输入级是一个比较器电路,它有两个输入端,一个用于输入三角波电压,固定不变,定名为pwm比较器三角波端(简称为三角波端);另一个用于输入控制电压,定名为pwm比较器控制端(简称为控制端)。在控制臂工作期间,依据pwm比较器工作原理,当控制端输入的控制电压与三角波端输入的三角波电压相等后瞬间,pwm比较器即完成取样输入,经闭锁处理后,输出控制臂pwm开关信号中的控制沿信号。只要上述“相等后瞬间”足够小,即输出的控制臂pwm开关信号中的控制沿信号延迟值足够小,就可以用该控制沿信号与之延续电平,将等同的控制端电压或三角波端电压择一存储,均存储了控制臂脉宽电压信号。继而将该存储的控制臂脉宽电压信号用于对之后跟随臂脉宽的设定控制,即可实现跟随式平衡控制,这即是本发明方法核心技术依据。从两个不同取样点取样存储,派生出了本发明的两种电路结构。
17.电路结构一,三角波存储的平衡控制电路结构(jg1),将三角波端取样存储的控制臂脉宽电压用于对之后跟随臂脉宽电压设定控制的跟随式平衡控制电路结构。
18.电路结构二,控制端存储的平衡控制电路结构(jg2),将控制端取样存储的控制臂脉宽电压用于对之后跟随臂脉宽电压设定控制的跟随式平衡控制电路结构。
19.取样存储电路有两种基本电路结构,一种是模拟取样存储式;另一种是数字取样存储式,它们都可用为本发明的取样存储电路。两者相比,模拟取样存储式电路结构简单,但只用于短暂存储;数字取样存储式电路结构复杂,但可长期存储。本发明存储的最长时间
约是桥式周期的一半,暂存时间极短,当采用20khz开关频率,存储时间也只有25微秒左右,用模拟取样存储电路完全可保证存储精度,加上电路简单,其性价比远高于数字结构式,为本发明首选。
20.要点三说明:为了用存储的控制臂脉宽电压来实现对跟随臂的脉宽控制,两种结构电路(jg1与jg2)略有不同。它们在取样点都设有一个模拟取样存储电路,均用于对控制臂脉宽电压实行取样存储。不同的是,控制端存储的平衡控制电路结构(jg2),由于其取样存储电路设置在控制端上,控制臂的脉宽取样、存储与用于对跟随臂的脉宽设定控制都在同一点上进行,无须增加其它电路;而三角波存储的平衡控制电路结构(jg1),其取样点在控制端之外,其控制端在控制臂时应输入外控制信号,而在跟随臂时应改为输入三角波存储的跟随臂脉宽电压设定信号,因此在控制端应设置一个二选一转换电路,以对应控制臂与跟随臂交替输入外控制信号与跟随臂脉宽电压设定信号。
21.要点四说明:pwm开关信号中的控制沿信号的位臂有两种,一种是产生在pwm开关信号的开关后沿,其前沿固定在三角波起点,如sg3525,称之谓后沿控制型pwm电路;另一种是产生在pwm开关信号的开关前沿,其后沿固定在三角波顶点,如tl494,称之谓前沿控制型pwm电路。两者差别只在于控制沿位置,它们均可用本发明方法,实现跟随式平衡控制。
22.pwm快速开关信号的延迟值只有20至50纳秒,是实现本发明跟随式平衡驱动最可靠最理想的控制信号。但至今它仅作为驱动放大器的一个信号源封闭在集成电路内部,没有见到哪一种pwm集成电路将之作为独立控制信号对外引出。因此,在当前能用于本发明的取样存储的控制信号只有含有pwm快速开关信号的控制臂的驱动信号。遗憾的是,它比快速开关信号的延迟值增加了驱动功率放大的输出延迟值,其延迟总值比快速开关信号的延迟值要大许多。下面将说明,在没有pwm快速开关信号条件下,采用某特定技术措施,也可以用现存的控制臂的驱动信号来实现对本发明的桥式两驱动臂的跟随式平衡控制。
23.式uy=tsux是两臂脉宽误差电压,也即两臂不平衡的误差电压表达式。式中:uy 是两臂脉宽误差电压,ts是pwm控制臂的驱动信号中控制沿输出延迟值,ux是取样臂的电压变化率。该表达式表明,减小延迟值(ts)或减小取样臂的电压变化率(ux)都可以降低两臂不平衡的误差电压。
24.下面说明三角波存储电路结构的两臂脉宽误差电压的产生特点及消除方法。该误差电压由延迟值(ts)与三角波的电压变化率(ux)相乘决定的。其变化率(ux)就是其斜率,线性的。当设计固定后,其变化率(ux)与延迟值(ts),两者也被固定,都是常数。两常数之积,即两臂脉宽电压误差就是一个固定值,因此可用特定技术手段予以消除,现已发现有二种方法,叙述于下。
25.三角波存储的平衡控制电路结构(jg1)的两臂脉宽误差电压消除方法之一,在对三角波的取样存储电路中增加一个延迟取样功能,在三角波电压处于线性变化条件下,可使之存储电容上的电压与三角波电压随时保持一个固定电压差。只要调节延迟值大小,就可令固定电压差等同到两臂脉宽误差电压。取样在三角波端,而存储的是存储电容上的电压,其结果是:取样与存储是在同一个电压值上,消除了因延迟值而造成的本发明跟随式的两臂脉宽电压误差。
26.三角波存储的平衡控制电路结构(jg1)的两臂脉宽误差电压消除方法之二,对输出的驱动两臂中之一臂脉宽进行增减处理,使之两臂脉宽同宽。
27.上述的两个两臂误差电压消除方法,对于不同的延迟值、不同的三角波的电压变化率均适用,只要它们是常数,均可消除。误差电压表达式(uy=tsux)中的ux仅指取样臂的电压变化率,对于三角波端存储的电路结构(jg1),它仅指三角波的电压变化率,与控制臂的任何控制波型均无关,即使采用本脉冲控制,也不会破坏该平衡控制的稳定性。
28.下面说明控制端存储的平衡控制电路结构(jg2)的两臂脉宽误差电压的产生特点及对策。用关系式(uy=tsux)对照控制端存储电路结构,控制臂的电压误差uy是一个变数,因为外输入控制信号的电压变化率ux是变化的。为减小脉宽电压误差uy,在选择延迟值较小的pwm电路基础上,应尽量减小控制信号的电压变化率ux。它可以从三方面着手,其一,采用平均值取样方法,如在外设的误差放大器电路加装有源dip电路,调节dip各参数,使控制沿信号落在误差放大器输出波形的较平坦区域,因该平坦区域的电压变化率会远小于三角波电压变化率。最佳实施结果是:当选用延迟值ts为250纳秒,在开关频率为20khz,占空比为85%的工作条件下,其产生的两臂误差电压会小于1%,处于可允许偏差值以内。其二,增大负载端辅助储能元器件的储能量,电压取样的,可适当增加取样点的负载电容量;电流取样的,可适当增加电感量,并严防电抗器饱和。三,在可允许条件下,应选用控制沿为下降型的pwm电路。如同为后沿控制型pwm电路sg3525与sg3527,前者是下降沿型,下降时间是50纳秒;后者是上升沿型,上升时间是100纳秒。它们的综合延迟值,下降沿型要比上升沿型要小。对于存储器的模拟开关,负向关闭也比正向关闭的关闭速度要快,有利于快速存储。
29.综上所述,在pwm集成电路无快速pwm开关信号输出接口条件下,用控制臂驱动信号中的控制沿信号及延续电平作为取样存储控制信号,可实现本发明跟随式平衡驱动。用三角波存储的平衡控制电路结构(jg1)由于误差电压可以消除,可用于较高频率的开关电源。用它设计的各类开关电源,无论在动特性、操作方式多样性与运行稳定性等诸多品质,都优于用控制端存储的平衡控制电路结构(jg2)设计的各类开关电源。一当今后有了带快速开关信号pwm电路,用快速开关控制沿作为存储控制信号,可大幅提高本发明的使用效果,尤其对于控制端存储的电路结构(jg2),作用会更大。因为pwm快速开关信号的延迟值可减小到25纳秒至50纳秒,比现有的pwm电路足足缩短2至5倍。那时使用本发明的电路结构时,效果会更好。
30.本发明还有一个独特效果,就是从根本上排除了臂臂之间的自激振荡。它是桥式开关电源最为可怕的,业内称为逆变颠覆的一种破坏性损坏。发明结构一
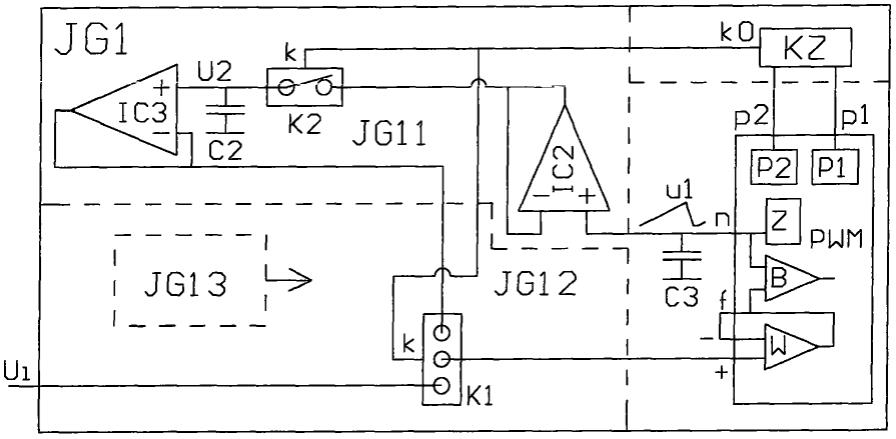
31.根据本发明方法而设计的电路结构一:三角波存储的平衡控制电路结构(jg1)(附图1)。它由五部分电路组成,它们是:一、在pwm电路三角波端设有一个以获取控制臂脉宽电压信号的三角波取样存储电路(jg11),以该电路存储的控制臂脉宽电压信号(u2)作为之后的跟随臂脉宽设定控制信号;二、在pwm控制端设有一个两选一信号转换电路 (jg12),以对应控制臂与跟随臂,将外输入控制信号(ui)与三角波存储的控制臂脉宽电压信号(u2)交替输入至pwm电路控制端;三,一个用于控制臂脉宽电压取样、存储、以用于对跟随臂脉宽设定控制及存储释放的时序循环控制电路(kz);四、与pwm电路的相关联接口及连接线;五、附加电路(jg13)。
32.本发明方法的电路结构(附图1)与pwm电路相关联的接口是:(n)接口:内接振荡器(z)的电容端与pwm比较器(b)的三角波端,外接三角波(u1)振荡电容(c3);(f) 接口:内接
pwm比较器(b)的控制端与误差放大器(w)的输出端;(-)接口:内接误差放大器(w)负输入端;(+)接口:内接误差放大器(w)正输入端;(p1)接口:内接跟随臂 pwm开关信号(p1)输出端;(p2)接口:内接跟随臂pwm开关信号(p1)输出端。将误差放大器(w)的负输入端(-)与输出端(f)相连接,可构结为一个输入pwm电路控制端的电压跟随器。另有一类电压型与电流型共用的pwm电路,其振荡器(z)产生的三角波不是用内接方法将之与pwm比较器(b)的三角波端相连接,而是在集成电路外用引线将之与 pwm比较器(b)的三角波端相连结。上述电路结口的脚位,不同型号产品或相同或不相同,以产品说明书为准。使用本发明方法的电路结构一(jg1)时,其pwm电路中的误差放大器 (w)将失去误差放大作用,须在外输入信号电路中增设误差放大器或电压比较器,其输出的放大信号即是本发明电路结构的外输入控制信号ui。
33.用于控制臂脉宽电压取样存储的三角波取样存储电路(jg11),选用模拟式电路结构,由单刀单掷模拟开关(k2)与储能电容(c2)组成。在单刀单掷模拟开关(k2)输入端与三角波(u1)输出入端(n)连线之间插入一只电压跟随器(ic2),用于隔离三角波电压振荡电容(c3)免受储能电容(c2)因充放电而造成的相互影响。储能电容(c2)前接单刀单掷模拟开关(k2)输出端,后接一只高阻电压跟随器(ic3),将储能电容(c2)上存储的控制臂脉宽信号电压(u2),作为之后的跟随臂的脉宽设定信号电压,由该高阻电压跟随器(ic3) 送往控制端所设的二选一信号转换电路(jg12)。当单刀单掷模拟开关(k2)内阻很小时,可考虑增添一只与该开关相串接的电阻,以用于消除高频自激纹波。单刀单掷模拟开关(k2) 有两种,一种是高通型(控制端k为高电平时,开关接通,反之关闭),另一种是低通型(控制端k为低电平时,开关接通,反之关闭)。如何迭择,由控制电路(kz)输出端(k0)输出的控制信号电平形态决定(见0034段)。
34.在pwm电路控制端所设的两选一信号转换电路(jg12),是一只单刀双掷模拟开关 (k1)。该模拟开关含三开关信号输出入端,其中一端为公共端,在本电路中设定为开关输出端,输出经由电压跟随器送往pwm电路控制端,该电压跟随器可选用误差放大器(w) 构结而成,也可另选一只,令其输出直接经(f)接口,送往pwm电路控制端,并将现存的误差放大器(w)关闭不用。另两端为输入端,其中一端为高通端(on)(控制端k为高电平时,该端接通该开关公共端),另一端为低通端(nc)(控制端k为低电平时,该端接通该开关公共端)。该两输入端分别用于连接外输入控制信号与三角端取样存储电路(jg11)输出端,两两如何配接,也由控制电路(kz)输出端(k0)输出的控制信号电平形态决定。将单刀单掷模拟开关(k2)的控制端(k)与单刀双掷模拟开关(k1)的控制端(k)相连接,由控制电路(kz)输出的单线信号统一控制。单刀单掷开关如何选择及单刀双掷开关两输入端如何配接,其规则是:当控制电路(kz)输出的控制沿信号是下降沿时,单刀单掷模拟开关 (k2)应选用高通型,单刀双掷模拟开关(k1)两输入端中的高通端(on)连接外输入控制信号(ui),而低通端(nc)连接由三角端取样存储电路(jg11)输出的跟随臂脉宽设定信号(u2);而当控制电路(kz)输出的控制沿信号是上升沿时,单刀单掷模拟开关(k2) 应选用低通型,单刀双掷模拟开关(k1)两输入端中的低通端(nc)连接外输入控制信号(ui),而高通端(on)连接由三角端取样存储电路(jg11)输出的跟随臂脉宽设定信号(u2)。
35.控制电路(kz)有两种,一种是后沿单式时序控制电路(kzd-h),另一种是复式时序控制电路(kzf)。后沿单式时序控制电路(kzd-h)又分为两种,一种是后沿下降型单式时序
控制电路(kzd-hx),另一种是后沿上升型单式时序控制电路(kzd-hs)。复式时序控制电路(kzf)有四种,其一是后沿下降型复式时序控制电路(kzf-hx),其二是后沿上升型复式时序控制电路(kzf-hs),其三是前沿下降型复式时序控制电路(kzf-qx),其四是前沿上升型复式时序控制电路(kzf-qs),一共六种具体控制电路。如此细分,是为了保证每个不同位置控制沿与不同形态控制沿在初始形态时即与各开关控制端直接连接,实施直接控制,免除因电平转换而造成的传输延迟,实现同相、同步控制。使用时,应根据pwm电路控制沿位置(前沿或后沿)与初始控制沿形态(下降或上升)两个条件,选择对应的控制电路,并按上述连接规则实施正确连接。上述四种复式时序控制电路均为全循环精密时序控制电路,它在完成对跟随臂脉宽电压设定控制后增加了一个存储电路释放环节。而后沿单式时序控制电路(f3d-hx)与(kzf-hx)无该功能,但可以使用,因为它简单。上述六种控制电路的具体结构,见具体实施方式。
36.综上所述,根据本发明方法而设计的电路结构一,三角波存储的平衡控制电路结构 (jg1)(附图1),其特征有三:
37.特征一、在pwm比较器三角波端所设的一个以获取控制臂脉宽电压信号的三角波取样存储电路(jg11)中,含有一个对三角波电压取样存储电路,它由单刀单掷模拟开关(k2) 与一个储能电容(c2)组成。
38.特征二、在pwm比较器控制端所设的两选一信号转换电路(jg12)中,含有一只单刀双掷模拟开关(k1),以对应控制臂时与跟随臂时,将外输入控制信号(ui)与三角波端存储的控制臂脉宽电压信号(u2)交替输入至pwm电路控制端,使跟随臂的脉宽电压随同控制臂的脉宽电压,实现两臂跟随式平衡驱动控制。
39.特征三、对存储电路中的单刀单掷模拟开关(k2)实施快速关闭存储的控制信号是控制臂pwm开关信号中的控制沿信号及之延续电平,即pwm快速开关信号或pwm电路驱动信号中的控制沿信号及之延续电平。
40.附加电路(jg13)有,小脉宽箝位电路、两臂驱动脉宽误差电压消除电路、存储器防自激电阻、抗干扰电路、静电或漏电消除电路等,依不同电子元器件及不同使用条件适配取用。两臂驱动脉宽误差电压消除电路是在三角波电压模拟取样存储电路(jg11)中增加一只用于延期取样的电阻,工作原理与取值方法及接入位置见(0025)节,该电阻同时兼作高频自激消除之用。上述附加电路应根据不同的使用要求、特定使用场所、元器件特性等因素选择使用。
41.上述的电路结构(jg1),对输入pwm控制端的电压波形可以是慢速变化的、快速变化的、甚至是脉冲式的,均能实现跟随式平衡控制。将它用于全桥式时,可制造出全桥式本脉冲控制的,兼具可靠性高、单体功率大、动特性优的开关电源。发明结构二
42.根据本发明方法而设计的电路结构二:控制端存储的平衡控制电路结构(jg2)(附图2)。它由四部分电路组成,它们是:一,在pwm电路控制端的外输入控制信道电路(jg21) 中,设有一个对输入控制端的脉宽电压取样存储电路;二、一个用于控制臂脉宽电压取样、存储、以用于对跟随臂脉宽设定与控制及存储释放的时序循环控制电路(kz);三、与pwm 电路的相关联接口及连接线;四、附加电路(jg23)。
43.本发明方法的电路结构与pwm电路(图)相关联的接口是:(n)接口:内接振荡器(z)
的电容端与pwm比较器(b)的三角波端,外接三角波(u1)振荡电容(c3);(+) 接口:内接误差外大器(w)正输入端;(-)接口:内接误差放大器(w)负输入端接;(f) 接口:内接pwm比较器(b)控制端与误差放大器(w)输出端;(p1)接口:内接跟随臂 pwm开关信号(p1)输出端;(p2)接口:内接跟随臂pwm开关信号(p2)输出端。
44.在pwm电路控制端的外输入的控制信道电路(jg21)中所设的取样存储电路,由单刀单掷摸拟开关(k3)与存储电容(c1)组成,沿外控制信号输入方向排列,单刀单掷摸拟开关(k3)在前,存储电容(c1)在后,由电容(c1)输出的控制臂脉宽信号经由误差放大器(w)构结成的电压跟随器或经由外设高阻电压跟随器(ic1),送往pwm电路控制端。当误差放大器(w)是高阻输入型时,可选择它为该电压跟随器,若误差放大器(w)是非高阻输入型时,应选用外设高阻电压跟随器(ic1)。当选用外设高阻电压跟随器(ic1)时,误差放大器(w)可作为中继跟随器,将外设高阻电压跟随器(ic1)的输出,中继到pwm 电路控制端,或将外设高阻电压跟随器(ic1)的输出经由接口(f)直接接入至pwm电路控制端,而将误差放大器(w)关闭。关闭的方法是在误差放大器(w)两输入端接口(+) 与接口(-)之间加一个关闭电压(u1)即可,具体操作见各自产品说明书。使用本发明方法的电路结构二时,其pwm电路中的原误差放大器失去误差放大作用,须在外输入信号电路中增设误差放大器,其输出的误差放大信号即是本发明电路结构的外输入控制信号ui。
45.在发明结构一中所列举控制电路(kz)的六种具体电路:(kzd-hx)、(kzd-hs)、 (kzf-hx)、(kzf-hs)、(kzf-hs)与(kzf-hs),对于发明结构二均是通用的。用于电路结构一(jg1)的,也可用于同型号pwm电路的结构二(jg2),它们是共享型的。当控制电路输出至单刀单掷摸拟开关(k3)控制端(k)的控制沿信号是下降沿时,单刀单掷模拟开关(k3)应选用高通型;而当控制电路输出的控制沿信号是上升沿时,单刀单掷模拟开关(k3) 应选用低通型。
46.附加电路(jg23)有小脉宽箝位电路、抗干扰电路、静电或漏电消除电路,滤波电路,依不同电子元器及使用环境取用。
47.综上所述,根据本发明方法而设计的电路结构二,控制端存储的平衡控制电路(jg2) (附图2),其特征有二,
48.特征一:在pwm比较器控制端连接外输入控制信号(ui)的信道(jg21)中,串接有一个取样存储电路,它由单刀单掷摸拟开关(k3)与存储电容(c1)组成,用于控制臂时对外输入控制信号(ui)实施控制臂脉宽电压信号的取样存储,继而用该存储的控制臂脉宽电压信号对随之的跟随臂脉宽电实施设定控制;
49.特征二:对存储电路中的单刀单掷摸拟开关(k3)实施快速关闭存储的控制信号是控制臂pwm开关信号中的控制沿信号及之延续电平,即pwm快速开关信号或pwm电路驱动信号中的控制沿信号及之延续电平。
附图说明
50.附图1,根据本发明方法而设计的电路结构一:三角波存储的pwm平衡控制电路 (jg1)
51.附图2,根据本发明方法而设计的电路结构二:控制端存储的pwm平衡控制电路 (jg2)
52.附图3,本发明方法电路结构的一个具体实施方式:低位小脉宽箝位电路(qw-l) 与高位小脉宽箝位电路(qw-h)
53.附图4,本发明方法电路结构的一个具体实施方式:后沿下降型复式时序控制电路 (kzf-hx)
54.附图5,本发明方法电路结构的一个具体实施方式:前沿下降型复式时序控制电路(kzf-qx)
55.附图6,本发明电路结构一,三角波存储的平衡控制电路结构(jg1)的一个实施例电路(jg1s)
56.附图7:本发明电路结构二,控制端存储的平衡控制电路结构(jg2)的一个实施例电路(jg2s)
具体实施方式
57.实施1,本发明电路结构中的一种小脉宽箝位电路,它分为两种,一种是低位小脉宽箝位电路(qw-l)(附图3左),另一种是高位小脉宽箝位电路(qw-h)(附图3右)。前者用于对后沿控制型输入信号的箝位,后者用于对前沿控制型输入信号的箝位。两种电路大同小异,它们都由一只运放电路(ic5)、一只箝位两极管(d1)与由电阻(r5)、电阻(r6) 及滤波电容(c4)组成的箝位电压设定电路组成。电阻(r5)与电阻(r6)相串接,两端跨接入一个稳定电压,如5v,其两电阻的分压值(u21)经电容(c4)滤波,接至运放(ic5) (+)输入端,提供箝位设定电压。箝位两极管(d1)跨接在运放(ic5)输出端与(-)输入端之间,低位箝位电路中的箝位两板管(d1)正极接运放(ic5)输出端;高位箝位电路中的箝位两板管(d1)负极接运放(ic5)输出端。小脉宽宽度取值约0.5至1.5微秒,对应pwm 三角波电压,低位箝位电压靠近三角波低点电压,高位箝位电压靠近三角波顶点电压,各由电阻(r5)与电阻(r6)依不同分压比设定。箝位控制由运放(ic5)(-)输入端输出,连接至控制信号(ui)输入线上,在接点与信号源之间插入一只隔离电阻(r4),阻值选用510 至750欧,以防输入信号(ui)源与运放(ic5)相互短路。上述箝位电路是经典实用电路,其工作原理,本文不再叙述。它作为本发明结构的附加电路是为了pwm开关信号不丢失,保证控制信号连续输出。
58.实施2,本发明电路结构中的一种后沿下降型复式时序控制电路(kzf-hx)(附图4)。该时序控制电路由取样存储保持控制,复位控制与输出控制三部分组成。双组份cm0s集成电路cd4093(或cd14528、或高速74hc4538等)中一组单稳态电路(ic6-2)用于取样存储保持控制,设定为正触发电路结构。正触发端(tr+)连接控制臂(p1)pwm开关信号输出端(p1),由开关信号前沿提供正触发,稳态时间约为一个桥式周期,由定时电阻(r8) 与定时电容(c6)共同设定,正问输出端(q)连接高通型单刀单掷模拟开关(k4)控制端 (k),用于对该开关(k4)通断控制;另一组单稳态电路(ic6-1)用于对单稳态电路(ic6-2) 的复位控制,设定为负触发电路。负向触发端(tr-)连接跟随臂(p2)pwm开关信号输出端(p2),由该信号后沿提供负触发信号,稳态时间为0.3至1微秒,由定时电阻(r7)与定时电容(c5)共同设定。其反相输出端连接单稳态电路(ic6-2)的复位端向后者提供复位控制;上拉电阻(r9)与电子模拟开关(k4)组成输出电路,模拟开关(k4)与上拉电阻(r9)接点(k0)是本控制电路输出端,输出控制信号(uk0)。电阻(r9)阻值为5 至10k欧。输出端(k0)如何与两电路结构中的模拟开关控制相连接及如何选择单刀单掷开关,请参见电路结一(jg1)或二(jg2),内有详
细说明。下面叙述工作过程。接通电源,在开关电源软启动尚未启动时,本控制电路中的单稳态电路即自动进入复位状态,模拟开关 (k4)关闭,输出端(k0)因电阻(r9)上接正电源(v+),输出控制信号(uk0)为高电平,该高电平令电路结构一(jg1)中的三角波存储器解锁,进入存储释放程序,并令pwm 控制端的单刀双掷模拟开关(k1)接通高通端,将外输入控制信号接入pwm电路控制端;或令电路结构二(jg2)中的存储电路解锁,进入存储释放程序。软启动开始,若输出的第一个半波是跟随臂的pwm开关信号,输出端(k0)保持不变。随之第二个半波必然是控制臂的pwm开关信号中前沿上升沿信号,该信号令单稳态电路(ic6-2)置位,其正向输出端(q) 输出高电平,模拟开关(k4)导通,将输出端(k0)与控制臂(p1)pwm开关信号输出端 (p1)直接相连接,此时控制信号仍是高电平,各模拟开关虽然状态不变,却已从释放进入取样程序。当控制臂pwm开关信号输出后沿下降沿信号,在其用予对电路机构一(jg1)控制时,即刻关闭单刀单掷模拟开关(k2),并用单刀双掷模拟开关(k1)将三角波存储电路存储的控制臂脉宽电压送往pwm电路控制端,用于对随之的跟随臂脉宽电压的设定控制;当其用予对电路机构二(jg2)控制时,即刻关闭单刀单掷模拟开关(k3),并将就地存储的控制臂脉宽电压用于对随之的跟随臂脉宽电压的设定控制。当完成对各自跟随臂的跟随控制,跟随臂(p2)pwm开关信号输出后沿下降沿信号,触发单稳电路(ic6-1)向单稳态电路(ic6-2) 输出复位控制信号,单稳态电路(ic6-2)复位,正向输出端(q)由高电平转为低电平,模拟开关(k4)关闭,输出端(k0)由低电平转为高电平,控制电路(kzf-hx)向电路结构一(jg1)或二(jg2)输出高电平复位信号,令电路结构一(jg1)或二(jg2)复位,进入存储释放与等待进入下一序列周期。本时序控制电路(kzf-hx)具有:1,生成的控制沿信号与pwm开关信号同向、同步无延期;2,开机自动复位;3,误触发无效三大控制特征。本控制电路的电源电压应根据pwm开关信号幅值而定,pwm开关信号若是驱动信号,供电电压可与pwm电路共用,即12v或15v,模拟开关选用isl43210,(单刀双掷模拟开关,可构结为单刀单掷模拟开关,16v供电)。pwm开关信号若是pwm快速开关信号,应视该信号幅值而定。幅值若是5v及以下,模拟开关可另选,单稳态电路可选用高速74hc4538。单稳态电路各脚位连接及设定方法,请见各自的产品说明书。
59.实施3,本发明电路结构中的一种后沿上升型复式时序控制电路(kzf-hs),它与后沿下降型复式时序控制电路(kzf-hx)形式相拟。改动处是:将电路(kzf-hx)输出电路中的输出电阻(r9)由接正改为接地;用于取样、存储保持控制单稳态电路(ic6-2),由上升沿触发,改为下降沿触发;用于复位控制单稳态电路(ic6-1),由下降沿触发,改为上升沿触发。输出复位信号(uk0)是低电平。输出端(k0)如何与两电路结构中的模拟开关控制端(k)相连接及如何选择单刀单掷开关,请参见电路结一(jg1)或二(jg2),内有详细说明。
60.实施4,本发明结构的一种前沿下降型复式时序控制电路(kzf-qx)(附图5),该时序控制电路(kzf-qx)也由取样存储保持控制,复位控制与输出控制三部分组成。双组份 cm0s集成电路cd4093(或cd14528、或高速74hc4538等)中一组单稳态电路(ic7-2) 用于取样存储保持控制,设定为负触发电路结构。负触发端(tr-)连接控制臂(p1)pwm 开关信号输出端(p1),由该开关信号前沿提供负触发,稳态时间约为一个桥式周期,由定时电阻(r11)与定时电容(c8)共同设定;另一组单稳态电路(ic7-1)用于对单稳态电路(ic7-2) 的复位控制,设定为负触发电路结构。负向触发端(tr-)连接跟随臂(p1)pwm开关信号输出端(p2),由跟随臂pwm开关信号前沿提供负触发信号,稳态时间为0.3至1微秒,由定时电阻(r10)与
定时电容(c7)共同设定,其反相输出端连接单稳态电路(ic7-2) 的复位端向后者提供复位控制;电阻(r12)与开关二极管(d3)及开关二极管(d4) 组成的二输入与门电路,用为输出控制。电阻(r12)上接电源,下接开关二极管(d3)及开关二极管(d4)的各正极端,三者结点处(k0)为该与门输出端,也即是本控制电路输出端,输出控制信号(vk0)。开关二极管(d3)负极连接控制臂开关信号输出端(p1),用于快速传递开关控制沿信号,另一开关二极管(d4)负极连接单稳态电路(ic7-2)的反向输出端用于传递存储保持信号,使输出控制信号具有与控制臂输出的控制沿信号同相同步,及延续电平保持的特性。输出端(k0)如何与两电路结构中的模拟开关控制端(k)相连接及如何选择单刀单掷开关,请参见电路结一(jg1)或二(jg2),内有详细说明。本时序控制电路(kzf-hx)具有:1,生成的控制沿信号与pwm开关信号同向、同步无延期;2,开机自动复位;3,误触发无效三大特征。本控制电路的电源电压应根据pwm开关信号幅值而定, pwm开关信号若是驱动信号,供电电压可与pwm电路共用,即12v或15v,pwm开关信号若是pwm快速开关信号,应视该信号幅值而定。幅值若是5v及以下,单稳态电路可选用高速74hc4538。单稳态电路各脚位连接及设定方法,请见各自的产品说明书。
61.实施5,本发明电路结构中的一种前沿上升控制型复式时序控制电路(kzf-qs),它与前沿下降控制型复式时序控制电路(kzf-qx)相拟。变动处是:输出控制电路改为二输入或门,其中,电阻(r12)改为接地,另一端与开关二极管(d3)及开关二极管(d4)各负端相连结,组成本控制电路(kzf-qs)输出端(k0),复位信号为低电平。用于取样存储保持控制的单稳态电路(ic7-2)改为正触发电路结构,输出端改为正输出端(o)。用于复位控制的单稳态电路(ic7-1)也改为正触发电路结构。输出端(k0)如何与两电路结构中的模拟开关控制相连接及如何选择单刀单掷开关,请参见电路结一(jg1)或二(jg2),内有详细说明。
62.实施6,本发明电路结构中的一种后沿控制型单式时序控制电路(kzd-h)。根据后沿的两种不同形态,其控制电路(kzd-h)又分为两种,一种是后沿下降型单式时序控制电路(kzd-hx);另一种是后沿上升型单式时序控制电路(kzd-hs)。它们的结构相同,都是由一条控制连线与一个小脉宽低位箝位电路(qw-l)组成。该连线是控制臂输出端与各模拟开关控制端的连结线,如何连结及如何迭择存储用模拟开关,请参见电路结一(jg1)或二 (jg2),内有详细说明。下面述说其控制原理,后沿下降型或上升型,其延续电平会自然保持到下一周期的控制臂pwm开关信号前沿,这是前周期解锁与后周期进入取样存储同一交替时刻,原存储尚未释放即进入下一周期的取样程序,这会造成新周期取样存储失误。补救的办法是利用低位小脉宽箝位电路,将该箝位电路的箝位宽度增大到1至2微秒,就可使之具有了存储释放功能。箝位脉宽增宽后会影响小电流调节与增大短路电流,消除办法是,在 pwm电路两臂驱动信号输往功放管的传输线上设置一个驱动前沿信号延迟电路,可使小电流调节与短路电流状复到原定设计。
63.实施7,本发明电路结构一,三角波存储的平衡控制电路结构(jg1)的一个实施例电路(jg1s)(附图6)。本实施例选用的pwm电路是sg3525,是市场上使用量最大的电压控制型pwm电路,适合本发明方法使用对象,是一种后沿下降控制型pwm电路,控制电路(kz)选用后沿下降型复式时序控制电路(kzf-hx)或后沿下降型单式时序控制电路 (kzd-hs),工作开关频率设计为23khz。本电路(jg1s)(附图6)是在电路结构一,即三角波存储的平衡控制电路结构(jg1)基础上,增添三个附加电路设计而成。附加电路一是:在三角波端的取样存
储电路中增加一只电阻(r2),该电阻(r2)串接在单刀单掷模拟开关 (k2)的前或后,与该模拟开关的内阻一起与取样存储电容(c2)组成延迟取样存储电路,用以消除两臂脉宽误差电压,其工作原理请见本文自然段(0025)。存储电容(c2)取值152p,电阻值由实验法确定,以两臂脉宽输出波型同宽为准;附加电路二是:在单刀双掷模拟开关(k1)前的外输入控制信号(ui)输入传输线上插接入低位小脉宽箝位电路(qw-l)(本文 0057及附图3左侧图),箝位脉宽可选约0.7微秒(当控制电路(kz)选用后沿下降控制型复式时序控制电路(kzf-hx)作为控制电路时)或约1.6微秒(当控制电路(kz)选用后沿下降控制型单式时序控制电路(kzd-hx)作为控制电路时),设定方法是,箝位电压的供电电压(5v)由pwm电路sg3525的第16脚基准电压(5v)提供,先固定电阻(r6)为5k 欧,调整电阻(r5)阻值,至其输出驱动脉宽最小值为设定值为准(用示波器观察),以确定电阻(r5)阻值;附加电路三是:在单刀双掷模拟电子开关(k1)的公共输出端与由误差放大器(w)组成的电压跟随器输入端(+)之间插入一组由电阻(r1)与电容(c1)组成的rc滤波电路,电阻(r1)与电容(c1)的取值依控制臂的控制输入波形而定。当输入的是脉冲波形,电阻(r1)阻值可选用270欧,电容(c1)选用510p,用以消除毛刺波,当输入是平均值波形,电阻(r1)阻值可选用510欧,电容(c1)选用222p,用于对外输人控制信号的二次滤波;运放(ic2)、(ic3)及(ic5)选用ca3240。模拟开关(k1)与(k2)选用isl43210。它是一种高速6脚单刀双掷模拟开关,第1脚为控制脚,笫4脚为低通脚(nc),若将之与公共输出脚(com)第6脚并接,即构成高通型单刀单掷模拟开关,用于三角波取样存储开关(k2)。最高电源供电电压为16v,可与pwm电路sg3525合并使用同一供电电源,可用于接受pwm驱动信号的控制。本电路(jg1s)与pwm电路sg3525相关联接口及具体脚位是,三角波输出入接口(n):6脚,误差放大器正输入接口(+):2脚,误差放大器负输入接口(-):1脚,pwm比较器控制端并误差放大器输出结口(f);9脚,控制臂驱动控制输出结口(q1):11或14脚,跟随臂驱动控制输出结口(q2):14或11脚。u1是接口(n)外接电容(c3)上的三角波信号,详情见该产品说明书。
64.实施8,本发明电路结构二,控制端存储的平衡控制电路结构(jg2)的一个实施例电路(jg2s)(附图7)。本实施例选用的pwm电路是sg3525,是市场上使用量最大的电压控制型pwm电路,适合本发明方法使用对象,是一种后沿下降控制型pwm电路,控制电路选用后沿下降型复式时序控制电路(kzf-hx)或后沿下降型单式时序控制电路(kzd-hx),工作开关频率设计为23khz。本实施例电路(jg2s)(附图7)是在电路结构二,即控制端存储的pwm平衡控制电路(jg2)基础上,增添二个附加电路设计而成的。附加电路一是:在控制信号(ui)输入传输线上插接入低位小脉宽箝位电路(qw-l)(本文0057及附图3左侧图),箝位脉宽设计同实施7;附加电路二是:在靠近单刀单掷模拟开关(k3)前或后串接一只电阻(r1),该电阻用于排除箝位电路与存储电容(c1)之间相互影响外,还连同小脉宽箝位电路中的隔离电阻(r4)、模拟开关(k3)内阻及存储电容(c1)组成rc滤波电路,对外输入控制信号实施二次再滤波,电阻(r1)取值510欧,储能电容(c1)取值222p,运放(ic1)与(ic5)选用ca3240。运放(ic1)作为外设高阻电压跟随器,用来替代低阻误差放大器(w),输入接控制端存储电容(c1),输出经结口(f)9脚直接接入控制端。高通型单刀单掷模拟开关(k3)用单力双掷模拟开关icl43210改接而成(同实施例7)。本实施电路(jg2s)与pwm电路sg3525相关联接口及具体脚位是,三角波输出入接口(n):6 脚,误差放大器正输入接口(+):2脚,误差放大器负输入接口(-):1脚,pwm比较器控制端并误差放大器输出结口(f);9脚,控制臂驱动控制输出结
口(q1):11或14脚。u1是接口(n)外接电容(c3)上的三角波信号,详情见该产品说明书。
65.关于桥式电压型pwm电路的升级建议:升级后的版本分两种,一种是初级基础版 pwm电路,另一种高级版pwm电路。初级基础版pwm电路的特征是:它的输出脚中含有控制臂pwm快速开关信号输出脚与跟随臂pwm快速开关信号输出脚。高级版pwm电路的特征是:它不仅含有控制臂与跟随臂pwm快速开关信号输出脚,在其内还含有电路结构一(jg1)或电路结构二(jg2)或电路结构一(jg1)与电路结构二(jg2)中的全部或部分结构电路。升级后的pwm新版本,用pwm快速开关信号对其两驱动臂脉宽实施跟随式平衡控制,将会产生最佳的平衡控制效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1