用于逆变器的电路的制作方法
1.本发明涉及一种电路,尤其是一种用于用来控制电动马达的线圈绕组中的电流的逆变器的电路。
背景技术:
2.电动马达基于如下原理工作,即当存在磁场时载流导线将会受到力。当载流导线垂直于磁场放置时,载流导线上的力与磁场的通量密度成比例。通常,在电动马达中,载流导线上的力被形成为旋转扭矩。
3.已知类型的电动马达的示例包括感应马达、无刷永磁马达、开关磁阻马达和同步滑环马达,其具有转子和定子,如本领域技术人员所公知的。
4.用于永磁马达的转子通常包括多个永磁体,其中所述多个永磁体安装在转子护铁上或转子护铁中,使得磁场围绕转子的圆周在极性上交替。当转子相对于定子旋转时,所述多个永磁体布置成扫过安装在定子上的线圈绕组的端部。线圈绕组中的电流的适当切换允许永磁体的磁极的同步吸引和排斥,以产生转子的旋转。
5.然而,当转子相对于线圈绕组旋转时,产生反电动势,也称为反emf,其与初始施加的电压相反,并因此作用于引起转子旋转的电流,从而限制转子的最大旋转速度。为了增加永磁电动马达的最大旋转速度,使用了磁场减弱。然而,磁场减弱能够导致由转子相对于线圈绕组旋转而产生的反emf增加到比用于在线圈绕组中产生电流的dc总线电平大的电平。
6.如果在电动马达系统中发生故障,例如在电动马达和/或电动马达电源中发生导致诸如电池之类的电源被断开以避免在正电源母线轨上出现高的反emf电压的故障,则电动马达可以被置于短路操作模式,也称为主动短路模式,由此所有线圈绕组使用逆变器中的开关连接到负电源母线轨,或者可替换地,所有线圈绕组连接到正电源母线轨。结果,将会在线圈绕组两端施加反emf,从而保护逆变器和连接到电源母线(也称为高压母线)的诸如dc链路电容器之类的任何其它部件免受过电压。
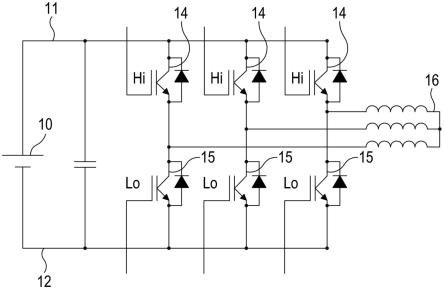
7.为了说明的目的,图1示出了已知的电动马达系统,其具有联接到第一母线11和第二母线12的电池10,第一母线和第二母线又联接到dc链路电容器13和具有三个高侧逆变器开关14和三个低侧逆变器开关15的三相逆变器。如图1所示,高侧逆变器开关14联接到第一母线11(即正母线),而低侧逆变器开关15联接到第二母线12(即负母线)。每个高侧和低侧开关组合形成逆变器的支路,其中逆变器的每个支路联接到三相电动马达的一个线圈绕组16。
8.各个低侧逆变器开关中的每一个联接到例如12伏或24伏的低压电源轨(未示出),其布置成在识别出电动马达系统内的故障时闭合低侧逆变器开关,从而将逆变器置于主动短路模式。
9.然而,如果电源/电池断开并且低压电源轨失效,则逆变器不能被置于主动短路模式,从而使逆变器、dc链路电容器和电池暴露于由来自电动马达的反emf所导致的潜在过电压情况。
10.为了解决这个问题,对于关键驱动系统,通常使用备用的低压电源轨。然而,备用的低压电源轨具有两个潜在的缺点,一是花费一些时间来“唤醒”,二是将增加驱动系统的总成本。
11.希望改善这种情况。
技术实现要素:
12.根据本发明的一个方面,提供了一种根据所附权利要求的电路。
13.所要求保护的本发明具有在不需要附加低压源的情况下保证主动短路模式的操作的优点,其中电路是紧凑的、低成本的并且易于集成到电动马达系统中。
附图说明
14.现在将通过示例的方式参考附图描述本发明,其中:图1示出了现有技术的电动马达系统;图2示出了根据本发明的实施例的转子的分解图;图3示出了根据本发明的实施例的转子;图4示出了根据本发明的实施例的控制装置;图5示出了根据本发明的实施例的控制装置的分解图;图6示出了现有技术的逆变器;图7示出了根据本发明的第一实施例的电动马达系统;图8示出了根据本发明的第二实施例的电动马达系统;图9示出了与本发明的实施例相关联的电特性。
具体实施方式
15.所描述的本发明的实施例用于与电动马达系统一起使用的电路,其中所述电路用于在用于电动马达系统的电源/电池与电动马达系统高压母线断开之后控制逆变器的配置和操作。逆变器布置成控制电动马达的线圈绕组内的电流。特别地,本发明的实施例布置成在用于电动马达系统的电源/电池与电动马达系统高压母线断开时将电动马达系统置于短路配置。
16.为了本实施例的目的,电动马达用于车辆的车轮中,然而电动马达可以位于车辆内的任何地方。马达是具有一组线圈的类型,所述一组线圈是附接到车辆的定子的一部分,被承载有附接到车轮的一组磁体的转子径向包围。为了避免疑惑,本发明的各个方面同样适用于具有相同布置的发电机。因此,电动马达的定义旨在包括发电机。此外,本发明的一些方面可应用于具有居中地安装在径向包围的线圈内的转子的布置。如本领域技术人员所理解的,本发明可应用于其它类型的电动马达。
17.为了本实施例的目的,如图2和图3所示,轮内电动马达包括定子252,其包括散热器253、多个线圈254、安装在散热器253上位于定子的后部上以驱动线圈的两个控制装置400、以及安装在定子上位于控制装置400的内径内的环形电容器,所述环形电容器也称为dc链路电容器。线圈254形成在定子齿叠片上以形成线圈绕组。定子罩256安装在定子252的后部上,包围控制装置400以形成定子252,然后定子可以固定到车辆上并且在使用期间不
相对于车辆旋转。
18.每个控制装置400包括两个逆变器410和控制逻辑420,控制逻辑在本实施例中包括用于控制逆变器410的操作的处理器,这在图4中示意性地示出。
19.尽管为了本实施例的目的,轮内电动马达包括两个控制装置,其中每个控制装置包括用于控制逆变器的操作的控制逻辑,换句话说,控制器,但是可以使用控制逻辑和逆变器组合的任何配置,包括远离电动马达放置控制逻辑和/或逆变器。
20.环形电容器联接在逆变器410和电动马达的dc电源两端,用于减小电动马达的电源线(也称为dc母线)上的电压纹波,并且用于减小电动马达运行期间的电压过冲。为了减小的电感,电容器安装成与控制装置400相邻。
21.转子240包括前部220和形成盖的圆柱形部221,所述盖基本上包围定子252。转子包括围绕圆柱形部221的内侧布置的多个永磁体242。为了本实施例的目的,32个磁体对安装在圆柱形部221的内侧上。然而,可以使用任何数量的磁体对。
22.磁体非常接近定子252上的线圈绕组,使得由线圈产生的磁场与围绕转子240的圆柱形部221的内侧布置的磁体242相互作用,以使转子240旋转。由于使用永磁体242来产生用于驱动电动马达的驱动扭矩,因此永磁体通常被称为驱动磁体。
23.转子240通过轴承座223附接到定子252。轴承座223可以是标准轴承座,如在这个马达组件将被固定到的车辆中所使用的那样。轴承座包括两个部分,第一部分固定到定子,第二部分固定到转子。轴承座固定到定子252的壁的中心部253,并且还固定到转子240的壳体壁220的中心部225。转子240因此通过在转子240的中心部225处的轴承座223旋转地固定到将与其一起使用的车辆。这具有的优点在于,轮辋和轮胎然后能够在中心部225处使用正常的车轮螺栓固定到转子240,以将轮辋固定到转子的中心部,并且因此牢固地固定到轴承座223的可旋转侧上。车轮螺栓可以穿过转子的中心部225固定到轴承座本身中。由于转子240和车轮两者都安装到轴承座223,所以转子和车轮的旋转角度之间存在一一对应关系。
24.图3从相对侧示出了图2所示的相同马达组件的分解图。转子240包括外部转子壁220和周向壁221,磁体242周向地布置在周向壁内。如前所述,定子252经由在转子壁和定子壁的中心部处的轴承座连接到转子240。
25.转子还包括用于位置感测的一组磁体227,也称为换向磁体,其与安装在定子上的传感器结合允许估计转子通量角。转子通量角限定了驱动磁体与线圈绕组的位置关系。或者,代替一组单独的磁体,转子可以包括磁性材料环,其具有充当一组单独的磁体的多个磁极。
26.为了允许使用换向磁体来计算转子通量角,优选地,每个驱动磁体具有相关联的换向磁体,其中,通过校准所测量的换向磁体通量角,从与所述一组换向磁体相关联的通量角导出转子通量角。为了简化换向磁体通量角和转子通量角之间的相关性,优选地,所述一组换向磁体具有与所述一组驱动磁体对相同数量的磁体或磁极对,其中换向磁体和相关联的驱动磁体彼此大致径向对准。因此,为了本实施例的目的,所述一组换向磁体具有32个磁体对,其中每个磁体对与相应的驱动磁体对大致径向对准。
27.在这个实施例中其为霍尔传感器的传感器安装在定子上。传感器安置成使得当转子旋转时,形成换向磁环的各个换向磁体中的每一个分别旋转经过传感器。
28.当转子相对于定子旋转时,换向磁体相应地旋转经过传感器,霍尔传感器输出ac
电压信号,其中传感器对于经过传感器的每个磁体对输出360电角度的完整电压周期。
29.为了改进的位置检测,优选地,传感器包括从第一传感器移位90电角度放置的相关联的第二传感器。
30.在本实施例中,电动马达包括四个线圈组,每个线圈组具有三个线圈子组,所述三个线圈子组联接成y形配置以形成三相子马达,从而导致马达具有四个三相子马达。如下所述,各个子马达的操作经由两个控制装置400中的一个来控制。然而,尽管本实施例描述了具有四个线圈组(即,四个子马达)的电动马达,但是马达可以同样具有一个或多个带有相关联的控制装置的线圈组。在优选实施例中,马达包括八个线圈组60,每个线圈组具有三个线圈子组,其联接成y形配置以形成三相子马达,从而导致马达具有八个三相子马达。类似地,每个线圈组可以具有任何数量的线圈子组,从而允许每个子马达具有两个或更多个相。
31.图4示出了相应线圈组60与控制装置400之间的连接,其中相应线圈组60连接到包括在控制装置400上的相应三相逆变器410,以控制相应线圈组内的电流。各个三相逆变器中的每一个包含六个开关,其被配置成具有三个高侧开关和三个低侧开关的三相布置,如下所述,其中三相交变电压可以通过六个开关的受控操作而产生。然而,开关的数量将取决于要施加到相应的子马达的电压相的数量,其中子马达可以构造成具有任何数量的相。
32.优选地,控制装置400为模块化结构。图5示出了优选实施例的分解图,其中每个控制装置400,也称为电源模块,包括在其中安装有两个电源基板组件510的电源印刷电路板500、控制印刷电路板520、用于连接到dc电池的四个电源母线530、以及用于连接到相应线圈绕组的六个相绕组母线540。每个控制装置部件安装在控制装置壳体550内,其中四个电源母线530安装在控制装置壳体550的与相绕组母线540相对的一侧上。
33.每个电源基板510布置成安装在形成于电源印刷电路板500中的相应孔中。
34.电源印刷电路板500包括各种部件,这些部件包括用于形成在电源基板组件510上的逆变器开关的驱动器,其中驱动器通常用于将控制信号转换成适当的形式以接通和断开逆变器开关。
35.控制印刷电路板520包括用于控制逆变器开关的操作的处理器。另外,每个控制印刷电路板520包括接口装置,以允许经由通信总线在相应的控制装置400之间通信,其中一个控制装置400布置成与安装在电动马达外部的车辆控制器通信。每个控制装置400上的处理器420布置成处理通过接口装置的通信。
36.如上所述,相应控制装置400上的处理器420布置成控制安装在控制壳体550内的相应电源基底520上的逆变器开关的操作,从而允许向每个电动马达线圈组60供给三相电压供应,导致相应线圈子组产生旋转磁场。如上所述,尽管本实施例将每个线圈组60描述为具有三个线圈子组,但是本发明不限于此,并且应当理解,每个线圈组60可以具有一个或多个线圈子组。
37.在相应的处理器420的控制下,每个三相桥式逆变器410布置成在相应线圈子组两端提供脉宽调制pwm电压控制,从而在相应线圈子组中产生电流以由相应子马达提供所需的转矩。
38.pwm控制通过使用马达电感平均所施加的脉冲电压以驱动所需电流进入马达线圈来工作。使用pwm控制,在马达绕组两端切换所施加的电压。在马达线圈两端切换电压的时间段期间,电流在马达线圈中以由其电感和所施加的电压所规定的速率上升。在电流已经
增大到超过所需值之前,pwm电压控制被切断,从而允许实现电流的精确控制。
39.对于给定的线圈组60,各个三相桥式逆变器410开关布置成在各个线圈子组的每一个两端施加单个电压相。
40.使用pwm切换,所述多个开关布置成在相应线圈子组两端施加交变电压。电信号的电压包络和相位角由调制的电压脉冲确定。
41.逆变器开关可以包括诸如mosfet或igbt之类的半导体器件。在本示例中,开关包括igbt。然而,可以采用任何合适的已知开关电路来控制电流。对于具有配置成驱动三相电动马达的六个开关的三相逆变器,所述六个开关配置为并联的三组两个开关,如图1中所示,其中每对开关被串联放置并且形成三相桥式电路的支路600以形成三相桥式逆变器配置。如图6所示,反激二极管610,也称为反向二极管,反并联地联接在每个开关620两端。单相逆变器将具有两对串联布置的开关620,以形成逆变器的两个支路600。
42.如上所述,每个逆变器支脚600都电联接在一对电源母线之间。
43.如上所述,使用pwm切换来向电动马达线圈绕组施加交变电压,其中转子速度取决于在线圈绕组两端施加的电压的幅值,其中施加到转子的转矩由线圈绕组内的驱动电流产生。
44.如果在电动马达系统中发生导致电动马达变得无法运行的故障,例如用于驱动电动马达系统的电源/电池与电动马达系统高压母线断开,并且电动马达系统的低压供应存在故障,则电动马达系统包括用于将逆变器置于主动短路模式的电路。所述电路使用由电动马达产生的反电动势以将逆变器置于主动短路模式,从而避免了对用于逆变器开关的单独的低压电源轨的需要。
45.图7示出了结合到电动马达系统中的电路的第一实施例,其中相同的附图标记用于表示与图1所示的特征相同的特征。
46.图7示出了具有联接到第一母线11和第二母线12的电池12的电动马达系统,第一母线和第二母线又联接到dc链路电容器13和具有三个高侧开关14和三个低侧开关15的三相逆变器。如图7所示,高侧逆变器开关14联接到第一母线11(即正母线),而低侧逆变器开关15联接到第二母线12(即负母线)。每个高侧和低侧开关组合形成逆变器的支路,其中逆变器的每个支路联接到三相电动马达的一个线圈绕组。
47.另外,包括第一阻抗70和第二阻抗71的电路串联地联接在第一电源母线11和第二电源母线12之间。将第一阻抗70选择成使得在第一电源母线11和第二电源母线12两端的电压降的大百分比形成在第一阻抗70两端,例如400v。将第二阻抗71选择成允许在第二阻抗71两端形成低电压,使得在第一阻抗70和第二阻抗71之间的一点处的电压是低电压,例如12v或24v,其适合于控制低侧逆变器开关15的操作。如图7所示,这个电压点连接到所述多个低侧开关15,其中,优选地,在发生第一预定条件时,例如在出现电动马达和/或相关控制系统中的导致电动马达变成无法操作的故障时,使用控制器72将所述电压联接到所述多个低侧逆变器开关15。施加到低侧逆变器开关的电压使低侧逆变器开关15闭合。类似地,高侧逆变器开关14被置于断开配置,其中这可以通过任何适当的手段,例如作为当使用增强型mosfet时没有电压被施加到相应开关的结果,来实现。
48.作为所述多个低侧逆变器开关15被置于闭合电路并且高侧逆变器开关14被置于断开配置的结果,电动马达的线圈绕组被置于短路配置。尽管本实施例将短路配置描述为
使低侧逆变器开关15闭合并且使高侧逆变器开关14断开,但是同样地,这种配置可以被颠倒,其中使用来自反emf的电压来保持低侧逆变器开关15断开,并且如果需要,保持高侧逆变器开关闭合。
49.例如,如果电动马达和/或相关控制系统中的故障被识别为是所述多个低侧逆变器开关中的一个保持断开的结果,则使用反emf来保持高侧开关闭合,如上所述,而其余低侧逆变器开关保持断开。同样地,如果这种情况被颠倒,则低侧逆变器开关将被闭合,并且允许其余操作高侧开关断开。
50.图8示出了结合到电动马达系统中的电路的第二实施例,其中使用相同的附图标记来表示与图1所示的特征相同的特征。这个电路提供了对图7所示的电路的更好的控制,例如,这个电路提供了对低侧逆变器开关何时闭合以将电动马达的线圈绕组置于短路配置的定时的更好的控制,同时避免了对用于逆变器开关的单独的低压电源轨的需要。
51.图8示出了具有联接到第一母线11和第二母线12的电池10的电动马达系统,第一母线和第二母线又联接到dc链路电容器13和具有三个高侧开关14和三个低侧开关15的三相逆变器。如图8所示,高侧逆变器开关14联接到第一母线11(即正母线),而低侧逆变器开关15联接到第二母线12(即负母线)。每个高侧和低侧开关组合形成逆变器的支路,其中逆变器的每个支路联接到三相电动马达的一个线圈绕组。
52.另外,包括第一开关80、第一电容器81和第二电容器82的电路串联地联接在第一电源母线11和第二电源母线12之间,其中低侧逆变器开关15联接到第一电容器81和第二电容器82之间的点。
53.优选地,第一电压箝位器件83联接在第一电容器81两端,第二电压箝位器件84联接在第二电容器82两端,如下所述。
54.如图8所示,第一电容器和第二电容器之间的所述电压点联接到所述多个低侧开关。
55.在优选实施例中,第一电容器81是高压电容器,第二电容器82是低压电容器,第一开关80是耗尽型半导体开关,第一电压箝位器件83是用于电压箝位的高压箝位器件,例如金属氧化物变阻器、电阻器或齐纳二极管,而第二电压箝位器件84是用于电压箝位的低压箝位器件,例如金属氧化物变阻器、电阻器或齐纳二极管。
56.在电动马达的正常运行期间,第一开关80例如经由控制器或逻辑器件85接收保持所述开关断开的控制信号,从而将第一电容器81和第二电容器82与在第一电源母线11和第二电源母线12两端的电压电隔离。因此,电路在电动马达的正常运行期间不引入任何电源损耗。
57.在发生与电动马达系统内的故障相关联的预定条件时,第一开关80闭合,导致第一电容器81和第二电容器82由dc链路电容器经由第一母线11和第二母线12充电。如果电动马达系统内的故障导致低电压的损失,则通过使用耗尽型半导体,低电压的损失将自动导致第一开关闭合。
58.在第一开关80闭合时,在第一电容器81和第二电容器82两端的稳态电压的比率将取决于它们各自的阻抗和所使用的箝位器件,其中选择各自的值使得在第一电容器81两端形成电压降的大部分。由于第一电容器81是高压电容器,所以在第一电容器81和第二电容器82之间的所述点处的电压是低电压,例如12v或24v。然而,可以选择电路组件值以向低侧
逆变器开关提供任何合适的电压值。
59.将低电压提供给低侧逆变器开关15,使它们闭合。类似地,高侧逆变器开关14被置于断开配置,其中这可以通过任何适当的手段,例如作为当使用增强型mosfet时没有电压被施加到相应开关的结果,来实现。
60.结果,在发生预定条件时,低侧逆变器开关15闭合,并且高侧逆变器开关14断开,导致电动马达线圈绕组被置于短路配置。
61.在优选实施例中,为了低侧逆变器开关的改进操作,可以使用附加的无源器件(未示出)来调节提供给低侧逆变器开关的电压。
62.尽管本实施例将短路配置描述为使低侧逆变器开关15闭合并且使高侧逆变器开关14断开,但是同样地,这个配置可以被颠倒,其中使用来自反emf的电压来保持低侧逆变器开关15断开,并且如果需要,保持高侧逆变器开关闭合。
63.例如,如果电动马达和/或相关联的控制系统中的故障被识别为是所述多个低侧逆变器开关中的一个保持断开的结果,则使用反emf来保持高侧开关闭合,如上所述,而其余低侧逆变器开关保持断开。同样地,如果这种情况被颠倒,则低侧逆变器开关将被闭合,并且允许其余操作高侧开关断开。
64.图9(a)、9(b)、9(c)和9(d)示出了在电动马达系统内的故障条件之后电压/电流的变化,所述故障条件导致来自电动马达的反emf形成在dc链路电容器两端,其中图9(a)示出了dc链路电容器13中的电压的变化,图9(b)示出了在第一电容器81和第二电容器82两端的充电电流的变化,图9(c)示出了在第一电容器81两端的电压的变化,图9(d)示出了在第二电容器82两端的电压的变化。
65.关于图9(a),在零秒处,作为电动马达系统内的故障的结果,在dc链路电容器13两端的电压由于来自电动马达的反emf而开始上升。一旦dc链路电容器电压超过预定值,在本实施例中为450v,第一开关闭合,导致电流脉冲对第一电容器81和第二电容器82充电。充电时间和电流幅值将由电路的集总电感和集总电阻确定。
66.如图9(c)和9(d)所示,第一电容器81被充电到大约400v,而第二电容器82被充电到大约40v,在开关80两端具有小的电压降,其中在优选实施例中,使用存储在第二电容器82上的能量来驱动线性调节器或类似的开关模式电源,以产生用于低侧逆变器开关15的15v接通电压,从而确保即使低压电源轨失效,电动马达也被置于短路配置,从而保护逆变器免受过电压条件。
67.尽管上述实施例描述了用于将电动马达置于短路配置的预定条件是dc链路电容器电压超过阈值的结果,但是可以使用与电动马达系统的故障相关联的任何预定条件。例如,用于控制逆变器操作的低电源轨的所识别的故障,一个或多个逆变器开关的故障,或者识别出电池10与第一电源母线11和/或第二电源母线12断开。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1