带电作业机器人的电位转移模型建模及参数控制方法
1.本发明涉及带电作业机器人,具体涉及一种带电作业机器人的电位转移模型建模及参数控制方法。
背景技术:
2.高压输电线路的合理、高效运维检修是保障其安全稳定运行的主要手段。目前主要依靠人工停电检修,经济损失大,人工带电作业劳动强度大,危险性高,加之带电作业专业人才的严重缺乏,很难实现带电作业的常态化。采用机器人是实现带电作业的有力手段,但机器人在输电线路的上下线过程不可避免地会经历等电位。等电位过程中,等电位转移棒与输电线路渐近过程中,空气击穿表现由电晕放电到间隙电弧放电直至持续电弧放电,产生的转移电流为瞬时大电流脉冲,它可以通过辐射或传导的方式影响机器人,导致其不能正常工作。因此,为避免转移电流以电磁波的形式传导或辐射并与屏蔽机箱孔缝耦合进入腔体内部,对电子器件造成干扰,阻碍机器人正常作业,需要对输电线路带电作业机器人等电位过程进行分析,确定机器人上下线过程电位转移的安全转移距离、电位转移臂的接触阻抗参数、电位转移的安全转移时间,保证带电作业机器人稳定可靠运行。
技术实现要素:
3.本发明要解决的技术问题:针对现有技术的上述问题,提供一种带电作业机器人的电位转移模型建模及参数控制方法,本发明旨在通过为确定不同高压输电线路带电作业机器人的等电位距离、电位转移臂参数、电位转移时间提供了电位转移模型及其参数的控制方法,为带电作业机器人的电磁防护与设计奠定了基础,为研究高压输电线路带电作业机器人的等电位安全距离、转移电流机理、电磁防护措施提供了模型依据,可适用于多种高压输电线路带电作业机器人上下线的等电位过程,为研究高压输电线路带电作业机器人电磁防护措施提供了理论依据。
4.为了解决上述技术问题,本发明采用的技术方案为:
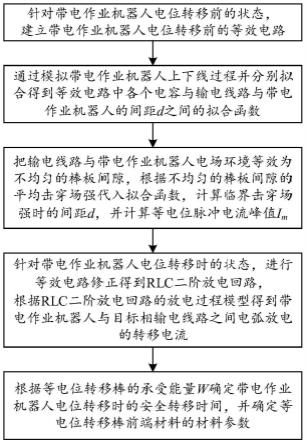
5.一种带电作业机器人的电位转移模型建模及参数控制方法,包括:
6.1)针对带电作业机器人电位转移前的状态,根据等效电路中各个电容以及输电线路的相间电容,建立带电作业机器人电位转移前的等效电路,并通过模拟带电作业机器人上下线过程并分别拟合得到等效电路中各个电容与目标相输电线路与带电作业机器人的间距d之间的拟合函数;把目标相输电线路与带电作业机器人电场环境等效为不均匀的棒板间隙,根据不均匀的棒板间隙的平均击穿场强代入等效电路中各个电容与目标相输电线路与带电作业机器人的间距d之间的拟合函数,计算临界击穿场强时目标相输电线路与带电作业机器人的间距d作为带电作业机器人等电位的安全距离,并计算电弧放电的等电位脉冲电流峰值im;
7.2)针对带电作业机器人电位转移时的状态,在带电作业机器人电位转移前的等效电路的基础上将带电作业机器人、目标相的输电线路之间的电容替换为三条并联支路,其
中一条并联支路为目标相输电线路与带电作业机器人的等电位转移棒之间的互电容、一条并联支路为带电作业机器人与目标相输电线路之间的互电容、一条并联支路由开关k、电阻r和电感l组成,其中电阻r为等电位转移棒的接触电阻参数,电感l为机器人与等电位棒上的电感,在带电作业机器人的等电位转移棒未发生电弧放电时开关k断开以对两个互电容充电,在带电作业机器人的等电位转移棒发生电弧放电时开关k闭合,两个互电容在电阻r和电感l上放电形成一个rlc二阶放电回路,根据rlc二阶放电回路的放电过程模型得到带电作业机器人与目标相输电线路之间电弧放电的转移电流;
8.3)根据带电作业机器人与目标相输电线路之间的电压、电弧放电的转移电流以及等电位转移棒的承受能量w确定带电作业机器人电位转移时的安全转移时间,并根据带电作业机器人电位转移时等电位转移棒的承受能量w以及等电位转移棒前端材料的承受温度t确定等电位转移棒前端材料的材料参数。
9.可选地,步骤1)中输电线路为同塔双回输电线路上的输电线路,其中同塔双回输电线路上的输电线路分为三层,最下一层为c相、中间一层为b相、最顶层为a相;且针对c相的输电线路建立带电作业机器人电位转移前的等效电路为:c相的输电线路上的点q依次通过电容c
c1
、电容c
c2
接地,电容c
c1
、电容c
c2
之间的点o为带电作业机器人的位置,电容c
c1
为带电作业机器人与c相的输电线路之间的电容,电容c
c2
为带电作业机器人的对地电容,c相的相电压uc作为点q和地之间的等效电源;针对b相的输电线路建立带电作业机器人电位转移前的等效电路为:b相的输电线路上的点q依次通过电容c
b1
、电容c
b2
、电容cc接地,电容c
b1
、电容c
b2
之间的点o为带电作业机器人的位置,电容c
b1
为带电作业机器人与b相的输电线路之间的电容,电容c
b2
为带电作业机器人与c相的输电线路之间的电容,电容cc为c相的输电线路的对地电容,b、c相的相电压u
bc
作为点q和电容c
b2
、电容cc间的中间节点之间的等效电源,c相的相电压uc作为电容c
b2
、电容cc间的中间节点和地之间的等效电源;针对a相的输电线路建立带电作业机器人电位转移前的等效电路为:a相的输电线路上的点q依次通过电容c
a1
、电容c
a2
、电容cb接地,电容c
a1
、电容c
a2
之间的点o为带电作业机器人的位置,电容c
a1
为带电作业机器人与a相的输电线路之间的电容,电容c
a2
为带电作业机器人与b相的输电线路之间的电容,电容cb为b相的输电线路的对地电容,a、b相的相电压u
ab
作为点q和电容c
a2
、电容cb间的中间节点之间的等效电源,b相的相电压ub作为电容c
a2
、电容cb间的中间节点和地之间的等效电源。
10.可选地,步骤1)中计算临界击穿场强时输电线路与带电作业机器人的间距d时,若目标相输电线路为c相的输电线路,则计算函数表达式为:
[0011][0012]
若目标相输电线路为b相的输电线路,则计算函数表达式为:
[0013][0014]
若目标相输电线路为a相的输电线路,则计算函数表达式为:
[0015][0016]
式(1)~式(3)中,e
cmax
为c相的不均匀的棒板间隙的平均击穿场强,e
bmax
为b相的不均匀的棒板间隙的平均击穿场强,e
amax
为a相的不均匀的棒板间隙的平均击穿场强,r为输电线路的导线半径,d为输电线路与带电作业机器人的间距。
[0017]
可选地,步骤2)中根据rlc二阶放电回路的放电过程模型得到带电作业机器人与目标相输电线路之间电弧放电的转移电流时,若目标相输电线路为c相的输电线路,rlc二阶放电回路的放电过程模型的函数表达式为:
[0018][0019]
且带电作业机器人与目标相输电线路之间电弧放电的转移电流的计算函数表达式为:
[0020][0021]
若目标相输电线路为b相的输电线路,rlc二阶放电回路的放电过程模型的函数表达式为:
[0022][0023]
且带电作业机器人与目标相输电线路之间电弧放电的转移电流的计算函数表达式为:
[0024][0025]
若目标相输电线路为a相的输电线路,rlc二阶放电回路的放电过程模型的函数表达式为:
[0026][0027]
且带电作业机器人与目标相输电线路之间电弧放电的转移电流的计算函数表达式为:
[0028][0029]
式(4)~式(9)中,l为等电位转移棒的阻抗参数中的电感,r为等电位转移棒的阻抗参数中的电阻,u
qo
为点o、点q之间的电压,t为时间,f为电路频率,τ为时间常数,ω为振荡角频率,φ为相位。
[0030]
可选地,若目标相输电线路为c相的输电线路,所述等电位转移棒的阻抗参数中的
电阻满足:
[0031][0032]
且振荡角频率ω的计算函数表达式为:
[0033][0034]
若目标相输电线路为b相的输电线路,所述等电位转移棒的阻抗参数中的电阻满足:
[0035][0036]
且振荡角频率ω的计算函数表达式为:
[0037][0038]
若目标相输电线路为a相的输电线路,所述等电位转移棒的阻抗参数中的电阻满足:
[0039][0040]
且振荡角频率ω的计算函数表达式为:
[0041][0042]
可选地,步骤2)中等电位脉冲电流峰值im的计算函数表达式为:
[0043][0044]
上式中,u
qo
为点o、点q之间的电压的最大值。
[0045]
可选地,步骤3)中确定带电作业机器人电位转移时的安全转移时间的函数表达式为:
[0046][0047]
上式中,w为等电位转移棒的承受能量,u
ci
为目标相输电线路对应的电容c
c11
、电容c
b11
或电容c
a11
上的电压,ii为目标相输电线路对应的转移电流,pi为目标相输电线路的转移电流对应的功率,t为安全转移时间。
[0048]
可选地,步骤3)中定等电位转移棒前端材料的材料参数的函数表达式为:
[0049][0050]
上式中,t为等电位转移棒前端材料的承受温度,为目标相输电线路对应的电容c
c11
、电容c
b11
或电容c
a11
上的电压,ii为目标相输电线路对应的转移电流,t为安全转移时间,w为等电位转移棒的承受能量,c为等电位转移棒前端材料的材料比热容,m为等电位转移棒前端材料的材料质量。
[0051]
此外,本发明还提供一种带电作业机器人的电位转移模型建模及参数控制系统,包括相互连接的微处理器和存储器,该微处理器被编程或配置以执行所述带电作业机器人
的电位转移模型建模及参数控制方法的步骤。
[0052]
此外,本发明还提供一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,且该计算机程序用于被计算机设备执行以实施所述带电作业机器人的电位转移模型建模及参数控制方法的步骤。
[0053]
和现有技术相比,本发明主要具有下述优点:本发明带电作业机器人的电位转移模型建模及参数控制方法包括针对带电作业机器人电位转移前的状态、电位转移时的状态进行等效电路建模,通过为确定不同高压输电线路带电作业机器人的等电位距离、电位转移臂参数、电位转移时间提供了电位转移模型及其参数的控制方法,为带电作业机器人的电磁防护与设计奠定了基础,为研究高压输电线路带电作业机器人的等电位安全距离、转移电流机理、电磁防护措施提供了模型依据,可适用于多种高压输电线路带电作业机器人上下线的等电位过程,为研究高压输电线路带电作业机器人电磁防护措施提供了理论依据。
附图说明
[0054]
图1为本发明实施例方法的流程示意图。
[0055]
图2为本发明实施例中同塔双回输电线路的结构示意图。
[0056]
图3为本发明实施例中c相线路电位转移前及电位转移时的等效电路图。
[0057]
图4为本发明实施例中b相线路电位转移前及电位转移时的等效电路图。
[0058]
图5为本发明实施例中a相线路电位转移前及电位转移时的等效电路图。
[0059]
图6为本发明实施例中带电作业机器人通过等电位转移棒的电位转移结构示意图。
[0060]
图7为本发明实施例中电容c
c1
的电容参数与等电位安全间距的关系。
[0061]
图8为本发明实施例中电容c
c2
的电容参数与等电位安全间距的关系。
[0062]
图9为本发明实施例中电容c
c1
电容参数随电位转移棒与输电线路间距变化图。
[0063]
图10为本发明实施例中3s等电位时间的转移电流图。
[0064]
图11为本发明实施例中5s等电位时间的转移电流图。
[0065]
图12为本发明实施例中3s等电位时间的转移电弧能量图。
具体实施方式
[0066]
下文将某同塔双回输电线路为例,对本发明带电作业机器人的电位转移模型建模及参数控制方法进行进一步的详细说明。
[0067]
如图1所示,本实施例带电作业机器人的电位转移模型建模及参数控制方法包括:
[0068]
1)针对带电作业机器人电位转移前的状态,根据等效电路中各个电容以及输电线路的相间电容,建立带电作业机器人电位转移前的等效电路,并通过模拟带电作业机器人上下线过程并分别拟合得到等效电路中各个电容与目标相输电线路与带电作业机器人的间距d之间的拟合函数;把目标相输电线路与带电作业机器人电场环境等效为不均匀的棒板间隙,根据不均匀的棒板间隙的平均击穿场强代入等效电路中各个电容与目标相输电线路与带电作业机器人的间距d之间的拟合函数,计算临界击穿场强时目标相输电线路与带电作业机器人的间距d作为带电作业机器人等电位的安全距离,并计算电弧放电的等电位
脉冲电流峰值im;
[0069]
2)针对带电作业机器人电位转移时的状态,在带电作业机器人电位转移前的等效电路的基础上将带电作业机器人、目标相的输电线路之间的电容替换为三条并联支路,其中一条并联支路为目标相输电线路与带电作业机器人的等电位转移棒之间的互电容、一条并联支路为带电作业机器人与目标相输电线路之间的互电容、一条并联支路由开关k、电阻r和电感l组成,其中电阻r为等电位转移棒的接触电阻参数,电感l为机器人与等电位棒上的电感,在带电作业机器人的等电位转移棒未发生电弧放电时开关k断开以对两个互电容充电,在带电作业机器人的等电位转移棒发生电弧放电时开关k闭合,两个互电容在电阻r和电感l上放电形成一个rlc二阶放电回路,根据rlc二阶放电回路的放电过程模型得到带电作业机器人与目标相输电线路之间电弧放电的转移电流;
[0070]
3)根据带电作业机器人与目标相输电线路之间的电压、电弧放电的转移电流以及等电位转移棒的承受能量w确定带电作业机器人电位转移时的安全转移时间,并根据带电作业机器人电位转移时等电位转移棒的承受能量w以及等电位转移棒前端材料的承受温度t确定等电位转移棒前端材料的材料参数。
[0071]
参见图2,本实施例步骤1)中输电线路为同塔双回输电线路上的输电线路,其中同塔双回输电线路上的输电线路分为三层,最下一层为c相、中间一层为b相、最顶层为a相。
[0072]
为研究带电作业机器人对该输电线路等电位过程,保证机器人稳定可靠运行,对带电作业机器人等电位过程建立等效电路图。
[0073]
参见图3的左侧部分,当目标相的输电线路为c相的输电线路时,针对c相的输电线路建立带电作业机器人电位转移前的等效电路为:c相的输电线路上的点q依次通过电容c
c1
、电容c
c2
接地,电容c
c1
、电容c
c2
之间的点o为带电作业机器人的位置,电容c
c1
为带电作业机器人与c相的输电线路之间的电容,电容c
c2
为带电作业机器人的对地电容,c相的相电压uc作为点q和地之间的等效电源;
[0074]
参见图4的左侧部分,当目标相的输电线路为b相的输电线路时,针对b相的输电线路建立带电作业机器人电位转移前的等效电路为:b相的输电线路上的点q依次通过电容c
b1
、电容c
b2
、电容cc接地,电容c
b1
、电容c
b2
之间的点o为带电作业机器人的位置,电容c
b1
为带电作业机器人与b相的输电线路之间的电容,电容c
b2
为带电作业机器人与c相的输电线路之间的电容,电容cc为c相的输电线路的对地电容,b、c相的相电压u
bc
作为点q和电容c
b2
、电容cc间的中间节点之间的等效电源,c相的相电压uc作为电容c
b2
、电容cc间的中间节点和地之间的等效电源;
[0075]
参见图5的左侧部分,当目标相的输电线路为c相的输电线路时,针对a相的输电线路建立带电作业机器人电位转移前的等效电路为:a相的输电线路上的点q依次通过电容c
a1
、电容c
a2
、电容cb接地,电容c
a1
、电容c
a2
之间的点o为带电作业机器人的位置,电容c
a1
为带电作业机器人与a相的输电线路之间的电容,电容c
a2
为带电作业机器人与b相的输电线路之间的电容,电容cb为b相的输电线路的对地电容,a、b相的相电压u
ab
作为点q和电容c
a2
、电容cb间的中间节点之间的等效电源,b相的相电压ub作为电容c
a2
、电容cb间的中间节点和地之间的等效电源。
[0076]
本实施例中,通过模拟带电作业机器人上下线过程并分别拟合得到等效电路中各个电容与目标相输电线路与带电作业机器人的间距d之间的拟合函数为一次函数,以目标
相输电线路为c相的输电线路为例,电容c
c1
的电容参数与等电位安全间距的关系如图7所示,电容c
c2
的电容参数与等电位安全间距的关系如图8所示,最终通过数据拟合,得到的拟合函数的函数表达式为:
[0077]cc1
=257.6d-0.406-3.109
[0078]cc2
=283.1d-0.435-5.632
[0079]
同理,可实现目标相输电线路为b/a相的输电线路时的拟合函数的拟合。
[0080]
本实施例中,步骤1)中计算临界击穿场强时输电线路与带电作业机器人的间距d时,若目标相输电线路为c相的输电线路,则计算函数表达式为:
[0081][0082]
若目标相输电线路为b相的输电线路,则计算函数表达式为:
[0083][0084]
若目标相输电线路为a相的输电线路,则计算函数表达式为:
[0085][0086]
式(1)~式(3)中,e
cmax
为c相的不均匀的棒板间隙的平均击穿场强,e
bmax
为b相的不均匀的棒板间隙的平均击穿场强,e
amax
为a相的不均匀的棒板间隙的平均击穿场强,r为输电线路的导线半径,d为输电线路与带电作业机器人的间距。根据式(1)~式(3)可知,在知道导线半径的情况下,平均击穿场强取决于输电线路与带电作业机器人的间距d的大小,又工频下,棒板间隙不均匀电场平均击穿场强为5kv/cm,因此通过模型可以计算得到临界击穿场强时,输电线路与带电作业机器人的间距d,这个临界的间距d即为等电位的安全距离。
[0087]
图6为带电作业机器人的等电位转移棒与目标相输电线路的等电位转移的结构示意图。带电作业机器人等电位过程等效成电容充放电过程,空气间隙等效为电容。本实施例中针对带电作业机器人的等电位转移棒与目标相输电线路的等电位转移的结构,在步骤2)中针对带电作业机器人电位转移时的状态,在带电作业机器人电位转移前的等效电路的基础上将带电作业机器人、目标相的输电线路之间的电容替换为三条并联支路,其中一条并联支路为目标相输电线路与带电作业机器人的等电位转移棒之间的互电容、一条并联支路为带电作业机器人与目标相输电线路之间的互电容、一条并联支路由开关k、电阻r和电感l组成。
[0088]
本实施例方法把高压输电线路带电作业机器人等电位过程等效成电容充放电过程,空气间隙等效为电容,电位转移棒接触电阻和机器人本体电阻以r代替、电位转移棒电抗和机器人本体电抗以l代替,电位转移过程分为电位转移前、电位转移中两部分,建立a、b、c三相电位转移模型如图3、4、5所示,左侧为电位转移前等效模型,右侧为电位转移中等
效模型,o点为机器人位置。当等电位安全距离确定之后,机器人进入电位转移过程,电位转移臂逐渐接近输电线路,造成输电线路原生电场严重畸变,随之会产生间歇电弧放电、持续电弧放电,而机器人本身由于位置没有变化,因此电位转移过程电场对机器人本体影响不大,此时等效电路模型为图3~图5右侧部分的等效电路图:
[0089]
参见图3中的右侧部分,当目标相的输电线路为c相的输电线路时,一条并联支路为目标相输电线路(c相的输电线路)与带电作业机器人的等电位转移棒之间的互电容c
c11
、一条并联支路为带电作业机器人与目标相输电线路(c相的输电线路)之间的互电容c
c12
。
[0090]
参见图4中的右侧部分,当目标相的输电线路为b相的输电线路时,一条并联支路为目标相输电线路(b相的输电线路)与带电作业机器人的等电位转移棒之间的互电容c
b11
、一条并联支路为带电作业机器人与目标相输电线路(b相的输电线路)之间的互电容c
b12
。
[0091]
参见图5中的右侧部分,当目标相的输电线路为a相的输电线路时,一条并联支路为目标相输电线路(a相的输电线路)与带电作业机器人的等电位转移棒之间的互电容c
a11
、一条并联支路为带电作业机器人与目标相输电线路(a相的输电线路)之间的互电容c
a12
。
[0092]
以目标相输电线路为c相的输电线路为例,随着等电位转移臂逐渐接近c相的输电线路,电容c
c11
逐渐升高,c
c12
、c
c2
基本保持不变,如果等电位安全距离(输电线路与带电作业机器人的间距d)为800mm,通过ansys仿真软件得到电容c
c12
的电容值基本保持在25pf,电容c
c2
的电容值维持在19pf,电容c
c11
的电容值随电位转移棒与输电线路的间距l变化情况如图9所示。当等电位转移棒上升而未发生电弧放电时,电容c
c11
、c
c12
进行充电,当发生电弧放电时,相当于开关k闭合,电容在电阻r和电感l上放电,形成一个rlc二阶放电回路。
[0093]
本实施例中,步骤2)中根据rlc二阶放电回路的放电过程模型得到带电作业机器人与目标相输电线路之间电弧放电的转移电流时,若目标相输电线路为c相的输电线路,rlc二阶放电回路的放电过程模型的函数表达式为:
[0094][0095]
且带电作业机器人与目标相输电线路之间电弧放电的转移电流的计算函数表达式为:
[0096][0097]
若目标相输电线路为b相的输电线路,rlc二阶放电回路的放电过程模型的函数表达式为:
[0098][0099]
且带电作业机器人与目标相输电线路之间电弧放电的转移电流的计算函数表达式为:
[0100][0101]
若目标相输电线路为a相的输电线路,rlc二阶放电回路的放电过程模型的函数表
达式为:
[0102][0103]
且带电作业机器人与目标相输电线路之间电弧放电的转移电流的计算函数表达式为:
[0104][0105]
式(4)~式(9)中,l为等电位转移棒的阻抗参数中的电感,r为等电位转移棒的阻抗参数中的电阻,u
qo
为点o、点q之间的电压,t为时间,f为电路频率,τ为时间常数,ω为振荡角频率,φ为相位。
[0106]
若目标相输电线路为c相的输电线路,等电位转移棒的阻抗参数中的电阻满足:
[0107][0108]
且振荡角频率ω的计算函数表达式为:
[0109][0110]
本实施例中,等电位转移棒的阻抗参数中的电阻r满足式(10),所以放电回路呈欠阻尼状态,振荡角频率ω的计算函数表达式为式(11)。由此可以得出结论,等电位转移棒的阻抗参数(电阻r和电感l)直接影响转移电流的大小、幅值、频率、电弧能量等,又电位转移臂的接触阻抗参数远大于机器人本体阻抗参数,因此若控制电位转移棒的接触阻抗参数能一定程度控制转移电流,减小转移电流对机器人正常工作的影响。
[0111]
同理,若目标相输电线路为b相的输电线路,等电位转移棒的阻抗参数中的电阻满足:
[0112][0113]
且振荡角频率ω的计算函数表达式为:
[0114][0115]
同理,若目标相输电线路为a相的输电线路,等电位转移棒的阻抗参数中的电阻满足:
[0116][0117]
且振荡角频率ω的计算函数表达式为:
[0118][0119]
本实施例中,步骤2)中等电位脉冲电流峰值im的计算函数表达式为:
[0120][0121]
上式中,u
qo
为点o、点q之间的电压的最大值。
[0122]
本实施例方法通过分析高压输电线路带电作业机器人等电位过程,建立等效电路模型;以机器人与输电线路间隙不击穿为判定依据,分析间隙间距与击穿场强关系,确定柔性电位转移臂的等电位安全距离;通过得到的等效电路模型,转移电流计算公式,控制柔性电位转移棒的接触阻抗参数、等电位安全距离、电位转移时间来改变转移电流大小;分析转移电流频率特性、电弧能量,结合机械臂材料的受损特性,以材料不受电弧损伤为指标,确定电位转移臂的安全转移时间。本实施例中,步骤3)中确定带电作业机器人电位转移时的安全转移时间的函数表达式为:
[0123][0124]
上式中,w为等电位转移棒的承受能量,为目标相输电线路对应的电容c
c11
、电容c
b11
或电容c
a11
上的电压,ii为目标相输电线路对应的转移电流,pi为目标相输电线路的转移电流对应的功率,t为安全转移时间。
[0125]
本实施例中,通过atp-emtp电磁暂态仿真软件进行仿真,当电位转移时间为3s和5s时,转移电流大小随时间变化如图10和图11所示。转移电流由大量脉冲波形组成,电位转移初始阶段脉冲电流间隔较远,此时发生间歇电弧放电,电容存储电荷较多,所以脉冲电流最大值较大,电位转移中间阶段电弧未消弧又立即燃弧,此时电容存储的电荷较少,脉冲电流幅值变化较小,当电位转移进入最终阶段时,电容存储的电荷刚存储就释放出来了,所以转移电流几乎为一个持续的小电流,其中电位转移中间阶段和最终阶段都表现为持续电弧放电,每个脉冲电流频率随电容c
c11
的变化而变化,整个等电位脉冲电流峰值如式(16)所示,等电位过程中电弧放电能量释放公式如式(17)所示。当等电位时间为3s时,电弧能量如图12所示,随着电位转移时间的增加,电弧放电释放的能量就越大。对于a、b、c三相,释放的能量会造成电位转移臂烧灼,影响转移臂的耐用性。
[0126]
本实施例中,步骤3)中定等电位转移棒前端材料的材料参数的函数表达式为:
[0127][0128]
上式中,t为等电位转移棒前端材料的承受温度,u
ci
为目标相输电线路对应的电容c
c11
、电容c
b11
或电容c
a11
上的电压,ii为目标相输电线路对应的转移电流,t为安全转移时间,w为等电位转移棒的承受能量,c为等电位转移棒前端材料的材料比热容,m为等电位转移棒前端材料的材料质量,从而可以材料损伤特性为指标确定等电位过程持续的时间,保证电位转移臂不受损害,分析转移电流频率特性为机箱屏蔽奠定基础。通过电弧放电能量w和电位转移棒材料特性指标确定安全电位转移时间,这个材料指标因材料不同而定。如果电位转移臂前端的接触材料为铜,铜的比热容为电弧作用体积较小,3s电位转移时间使得电位转移臂前端最高温度上升128℃。对于铜,如果以200℃的温度进行加热,会与氧气反映形成氧化铜,而氧化铜导电性、耐热性不如铜,且会与稀酸反应,因此为保证电位转移臂的耐用性,不能让电位转移臂前端最高温度上升至200℃。通过计算得到上升至200℃的电位转移时间为7.68s,该时间即为电位转移臂的安全电位转移时间。
[0129]
综上所述,本实施例方法通过分析机器人在输电线路各相的上下线过程,建立a、b、c三相各自电位转移的等效电路模型及其电路中各个元件的参数关系,根据电位转移前击穿电压与机器人—输电线路间距关系,以间隙不击穿为判定依据,确定使用柔性等电位
转移臂实现机器人与输电线路等电位的安全距离,防止电弧放电损伤机器人。通过等效电路模型,得到转移电流计算公式,控制柔性电位转移棒的接触电阻参数、等电位安全距离、电位转移时间以改变转移电流大小。分析转移电流频率特性和电弧能量,结合机械臂材料的受损特性,以材料不被电弧损伤为指标,确定电位转移臂的安全转移时间,为作业机器人电磁防护与屏蔽奠定基础。本实施例方法可适用于多种高压输电线路带电作业机器人上下线的等电位过程,为研究高压输电线路带电作业机器人电磁防护措施提供了理论依据。
[0130]
此外,本实施例还提供一种带电作业机器人的电位转移模型建模及参数控制系统,包括相互连接的微处理器和存储器,该微处理器被编程或配置以执行前述带电作业机器人的电位转移模型建模及参数控制方法的步骤。
[0131]
此外,本实施例还提供一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,且该计算机程序用于被计算机设备执行以实施前述带电作业机器人的电位转移模型建模及参数控制方法的步骤。
[0132]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可读存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0133]
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1