一种多线路协同巡检机器人智能管理系统的制作方法
1.本发明涉及架空电线巡检技术领域,尤其涉及一种多线路协同巡检机器人智能管理系统。
背景技术:
2.对于一些原始森林地区,往往采用巡检机器人对多条架空电线进行巡检,可大大提高巡检的效率。现有技术,当巡检机器人在避雷线上出现故障而无法运动时,往往需要搬运登高设备至原始森林,人员通过登高设备上升至巡检机器人处,将机器人从避雷线上取下,并对机器人进行维修,十分麻烦。
技术实现要素:
3.本发明为了解决现有技术上述缺点,提出一种多线路协同巡检机器人智能管理系统。
4.为实现上述目的,本发明采用如下技术方案:一种多线路协同巡检机器人智能管理系统,包括机器人、监控后台;机器人的数量至少有两个,机器人包括壳体,壳体的下侧设置有摄像头,壳体的内部设置有无线数据收发装置,无线数据收发装置和摄像头连接;监控后台和无线数据收发装置连接;壳体的上侧固定连接有两个沿竖向延伸的连接杆,连接杆的上端的一侧转动连接有第一滚轮,第一滚轮的周向设置有第一限位槽,第一滚轮的下侧设置有滑动座,滑动座和连接杆滑动连接,滑动座的上端的一侧转动连接有用于和第一滚轮配合并驱动第一滚轮转动的第二滚轮,壳体内设置有驱动装置,驱动装置和滑动座连接并用于驱动滑动座上下运动,驱动装置和第二滚轮连接并用于驱动第二滚轮转动,壳体的下侧设置有过孔,过孔穿过有拉绳,驱动装置和拉绳的上端连接并用于缠绕或释放拉绳。
5.进一步的,第一滚轮包括第一主体,第一主体的两端向外延伸形成第一翻边,第一翻边之间形成第一限位槽,第二滚轮包括第二主体,第二主体的两端向外延伸形成用于和第一翻边配合的第二翻边,第二翻边之间形成第二限位槽。
6.进一步的,滑动座沿竖向延伸,滑动座穿过壳体的上下两侧,滑动座的下端的一侧转动连接有带轮,带轮和第二主体之间通过传动带连接,传动带沿竖向延伸且穿过壳体,传动带的上端位于第二翻边之间,滑动座的上端固定连接有第一阻尼轴,第一阻尼轴穿过第二主体并和第二主体转动连接,第二主体和第一阻尼轴之间设置有阻尼油;驱动装置包括转动连接在壳体内的第二阻尼轴,第二阻尼轴连接有电机,第二阻尼轴套设有卷绕轮,卷绕轮和第二阻尼轴转动连接,卷绕轮和第二阻尼轴之间设置有阻尼油,拉绳的上端和卷绕轮连接,拉绳的下端连接有重块,第二阻尼轴套设有驱动轮,驱动轮和第二阻尼轴转动连接,且驱动轮和第二阻尼轴之间设置有阻尼油,驱动轮和传动带的一侧抵接,第二阻尼轴设置有限转装置。
7.进一步的,第二阻尼轴内设置有转动槽,转动槽的延伸方向和第二阻尼轴的延伸
方向一致,第二阻尼轴设置有第一容纳槽、第二容纳槽和滑槽,转动槽的一端和第一容纳槽连通,转动槽的另一端和第二容纳槽连接,驱动轮的外缘朝向卷绕轮的一侧延伸形成第三翻边,第三翻边的内侧固定连接有若干凸起,凸起之间形成第三限位槽;限转装置包括转动连接在转动槽内的第三阻尼轴、设置在第一容纳槽内的第一阻尼轮、转动连接在第二容纳槽内的第二阻尼轮,第一阻尼轮和第三阻尼轴的一端固定连接并和卷绕轮的内壁配合,第二阻尼轮和第三阻尼轴套接,第二阻尼轮和第三阻尼轴之间设置有阻尼油,滑槽内滑动连接有用于和第三限位槽配合的齿条,滑槽的槽底和齿条之间通过弹簧连接,齿条和第二阻尼轮啮合。
8.进一步的,滑槽的一侧设置有限位滑槽,限位滑槽的延伸方向和滑槽的延伸方向一致,齿条固定连接有限位凸起,限位凸起设置在限位滑槽内。
9.和现有技术相比,本发明提供的一种多线路协同巡检机器人智能管理系统在其中一个机器人出现故障而无法沿避雷线运动时,通过另一个机器人,可将故障机器人从避雷线上取下,而无需登高设备。
附图说明
10.图1为本技术的实施例的巡检时的俯视图。
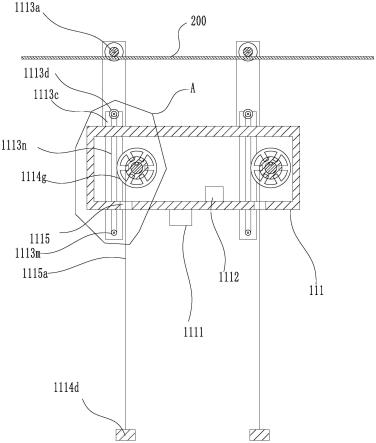
11.图2为本技术的实施例的机器人巡检时的剖视图。
12.图3为本技术的实施例的图2的a处放大图。
13.图4为本技术的实施例的图3的b-b剖视图。
14.图5为本技术的实施例的图4的c处放大图。
15.图6为本技术的实施例的卷绕轮卷绕拉绳的示意图。
16.图7为本技术的实施例的重块和壳体抵接的示意图。
17.图8为本技术的实施例的齿条和限位槽配合的示意图。
18.图9为本技术的实施例的滑动座向上运动的示意图。
19.图10为本技术的实施例的机器人沿避雷线运动的示意图。
20.图11为本技术的实施例的机器人之间通过拉绳连接的示意图。
21.图12为本技术的实施例的第二机器人卷绕拉绳的示意图。
22.图13为本技术的实施例的第二机器人通过拉绳拉动第一机器人的示意图。
23.图14为本技术的实施例的第一机器人和避雷线脱开的示意图。
24.图15为本技术的实施例的第一机器人转动后和避雷线脱开的示意图。
具体实施方式
25.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
26.参见图1至图15,一种多线路协同巡检机器人智能管理系统,包括机器人11、监控后台(图中未示出)。机器人11的数量至少有两个,机器人11包括壳体111,壳体111的下侧设置有摄像头1111,壳体111的内部设置有无线数据收发装置1112,无线数据收发装置1112和摄像头1111连接;监控后台和无线数据收发装置1112连接。
27.壳体111的上侧固定连接有两个沿竖向延伸的连接杆1113,连接杆1113的上端的一侧转动连接有第一滚轮1113a,第一滚轮1113a的周向设置有第一限位槽1113b,第一滚轮
1113a的下侧设置有滑动座1113c,滑动座1113c和连接杆1113滑动连接,滑动座1113c的上端的一侧转动连接有用于和第一滚轮1113a配合并驱动第一滚轮1113a转动的第二滚轮1113d,壳体111内设置有驱动装置1114,驱动装置1114和滑动座1113c连接并用于驱动滑动座1113c上下运动,驱动装置1114和第二滚轮1113d连接并用于驱动第二滚轮1113d转动,壳体111的下侧设置有过孔1115,过孔1115穿过有拉绳1115a,驱动装置1114和拉绳1115a的上端连接并用于缠绕或释放拉绳1115a。
28.第一滚轮1113a包括第一主体1113e,第一主体1113e的两端向外延伸形成第一翻边1113f,第一翻边1113f之间形成第一限位槽1113b,第二滚轮1113d包括第二主体1113g,第二主体1113g的两端向外延伸形成用于和第一翻边1113f配合的第二翻边1113h,第二翻边1113h之间形成第二限位槽1113k。
29.滑动座1113c沿竖向延伸,滑动座1113c穿过壳体111的上下两侧,滑动座1113c的下端的一侧转动连接有带轮1113m,带轮1113m和第二主体1113g之间通过传动带1113n连接,传动带1113n沿竖向延伸且穿过壳体111,传动带1113n的上端位于第二翻边1113h之间,滑动座1113c的上端固定连接有第一阻尼轴1113p,第一阻尼轴1113p穿过第二主体1113g并和第二主体1113g转动连接,第二主体1113g和第一阻尼轴1113p之间设置有阻尼油。在本实施方式中,阻尼油可以设置为硅油,硅油具有较好的黏性。
30.驱动装置1114包括转动连接在壳体111内的第二阻尼轴1114a,第二阻尼轴1114a连接有电机,第二阻尼轴1114a套设有卷绕轮1114c,卷绕轮1114c和第二阻尼轴1114a转动连接,卷绕轮1114c和第二阻尼轴1114a之间设置有阻尼油,拉绳1115a的上端和卷绕轮1114c连接,拉绳1115a的下端连接有重块1114d,第二阻尼轴1114a套设有驱动轮1114e,驱动轮1114e和第二阻尼轴1114a转动连接,且驱动轮1114e和第二阻尼轴1114a之间设置有阻尼油,驱动轮1114e和传动带1113n的一侧抵接,第二阻尼轴1114a设置有限转装置1114f。
31.第二阻尼轴1114a内设置有转动槽,转动槽的延伸方向和第二阻尼轴1114a的延伸方向一致,第二阻尼轴1114a设置有第一容纳槽、第二容纳槽和滑槽,转动槽的一端和第一容纳槽连通,转动槽的另一端和第二容纳槽连接,驱动轮1114e的外缘朝向卷绕轮1114c的一侧延伸形成第三翻边1114g,第三翻边1114g的内侧固定连接有若干凸起1114h,凸起1114h之间形成第三限位槽1114k;限转装置1114f包括转动连接在转动槽内的第三阻尼轴1114m、设置在第一容纳槽内的第一阻尼轮1114n、转动连接在第二容纳槽内的第二阻尼轮1114p,第一阻尼轮1114n和第三阻尼轴1114m的一端固定连接并和卷绕轮1114c的内壁配合,第二阻尼轮1114p和第三阻尼轴1114m套接,第二阻尼轮1114p和第三阻尼轴1114m之间设置有阻尼油,滑槽内滑动连接有用于和第三限位槽1114k配合的齿条1114q,滑槽的槽底和齿条1114q之间通过弹簧1114r连接,齿条1114q和第二阻尼轮1114p啮合。
32.滑槽的一侧设置有限位滑槽1114s,限位滑槽1114s的延伸方向和滑槽的延伸方向一致,齿条1114q固定连接有限位凸起1114h,限位凸起1114h设置在限位滑槽1114s内。
33.实施例原理:现实中,架空电线的上方设置有避雷线200,且避雷线200平行设置,这里为了便于描述,假定避雷线200为两根,分别命名为第一避雷线和第二避雷线,相应的,机器人11的数量为两个,机器人11和避雷线200一一对应,和第一避雷线对应的机器人11为第一机器人,
和第二避雷线对应的机器人11为第二机器人。
34.本技术应用于大跨度架空电线,在使用时,第一机器人的第一滚轮1113a架在第一避雷线的上侧,具体的,第一机器人的第一滚轮1113a位于其对应的连接杆1113靠近第二避雷线的一侧;对应的,第二机器人的第一滚轮1113a架在第二避雷线的上侧,具体的,第二机器人的第一滚轮1113a位于其对应的连接杆1113靠近第一避雷线的一侧,参见图1,此时,第一机器人和第二机器人位于避雷线200的两端。
35.在驱动装置1114的作用下,第一机器人沿第一避雷线向第二机器人运动,而第二机器人沿第二避雷线向第一机器人运动,在这个过程中,第一机器人下侧的摄像头1111拍摄位于第一避雷线的下侧的架空电线,并通过无线数据收发装置1112将所拍摄的图像传输至监控后台,第二机器人下侧的摄像头1111拍摄位于第二避雷线的下侧的架空电线,并通过无线数据收发装置1112将所拍摄的图像传输至监控后台,人员在监控后台可根据图像来巡视,从而及时发现故障。
36.驱动装置1114运行前,拉绳1115a的下端下垂使得重块1114d靠近地面,参见图2。当驱动装置1114运行时,驱动装置1114先向上卷绕拉绳1115a,直至拉绳1115a的下端的重块1114d和壳体111的下侧抵接,参见图7,然后驱动装置1114驱动滑动座1113c向上运动,直至第二滚轮1113d和第一滚轮1113a抵接,具体的,第二翻边1113h和第一翻边1113f抵接,第一滚轮1113a和第二滚轮1113d之间扣合,防止避雷线200从第一滚轮1113a和第二滚轮1113d之间离开,然后驱动装置1114驱动第二滚轮1113d转动,第二滚轮1113d带动第一滚轮1113a转动,以使机器人11沿避雷线200运动,参见图10。
37.当驱动装置1114停止运行时,滑动座1113c向下运动,第一滚轮1113a和第二滚轮1113d脱开,在重块1114d的重力作用下,拉绳1115a向下运动,直至重块1114d临近地面。
38.当其中一个机器人11出现故障时,无法继续沿避雷线200运动时,这里假定第一机器人出现故障时,第一机器人的滑动座1113c向下运动,第一滚轮1113a和第二滚轮1113d脱开,第一机器人的拉绳1115a向下运动,直至重块1114d靠近地面,当第二机器人运动至第一机器人附近时,第二机器人停止沿第二避雷线的运动,第二机器人的滑动座1113c向下运动,第二机器人的拉绳1115a向下运动,直至第二机器人的重块1114d靠近地面,然后人员将第一机器人的其中一个拉绳1115a的下端和第二机器人的其中一个拉绳1115a的下端连接,参见图11。然后第二机器人的驱动装置1114运行,先卷绕拉绳1115a向上运动,直至重块1114d和对应的壳体111的下侧抵接,参见图12,然后第二机器人的驱动装置1114驱动滑动座1113c向上运动,直至第二滚轮1113d和第一滚轮1113a抵接,随后驱动装置1114通过第二滚轮1113d驱动第一滚轮1113a运动,此时,第二机器人将沿第二避雷线继续运动。参见图13和图14,由于此时第一机器人和第二机器人通过各自的拉绳1115a连接,在拉绳1115a的作用下,第一机器人被拉绳1115a拉动,由于第一机器人的第一滚轮1113a和第二滚轮1113d并没有把第一避雷线扣合,所以,在拉绳1115a的拉动下,第一机器人的下端向第二机器人摆动,并同时被拉绳1115a向第二机器人的运动方向拉,在本实施方式中,在拉绳1115a的作用下,第一机器人相对第一避雷线将发生旋转,并最终第一滚轮从第一避雷线上掉落,即,第一避雷线和第一限位槽1113b脱开,即第一机器人从第一避雷线上掉落,参见图14和图15。在这个过程中,第二机器人的第一滚轮1113a和第二滚轮1113d将第二避雷线扣合,所以,第二机器人不会和第二避雷线脱开,即第二机器人不会从第二避雷线上掉落,即当第一机器
人掉落时,在由于拉绳1115a和第二机器人连接,第一机器人不会摔在地面上,防止第一机器人摔坏,第一机器人可由在地面上的人员接收。此时,停止第二机器人的驱动装置1114,第二机器人的滑动座1113c向下运动,第二机器人的拉绳1115a向下运动,当拉绳1115a临近地面时,地面的人员将第一机器人的拉绳1115a和第二机器人的拉绳1115a解开。至此,第一机器人和第二机器人脱开,可对第一机器人进行维修。本技术中,当其中一个机器人11出现故障时,利用另一个机器人11可以将出现故障的机器人11从避雷线200上取下,无需借助登高设备。
39.具体的,驱动装置1114运行时,电机带动第二阻尼轴1114a转动,此时,齿条1114q和第三限位槽1114k脱开,第二阻尼轴1114a转动时,驱动轮1114e不转动,在阻尼油的作用下,第二阻尼轴1114a带动卷绕轮1114c转动,卷绕轮1114c缠绕拉绳1115a,重块1114d向上运动,直至重块1114d和壳体111的下侧抵接,参见图6和图7。由于重块1114d无法通过过孔1115,所以当第二阻尼轴1114a继续转动时,卷绕轮1114c无法继续缠绕拉绳1115a,即卷绕轮1114c无法继续转动。参见图8,当第二阻尼轴1114a继续转动时,第三阻尼轴1114m跟随第二阻尼轴1114a转动,在第三阻尼轴1114m的作用下,第一阻尼轮1114n沿卷绕轮1114c的内壁快速转动,第一阻尼轮1114n带动第三阻尼轴1114m快速转动,当第三阻尼轴1114m和第二阻尼轮1114p之间设置有阻尼油时,在阻尼油的作用下,第三阻尼轴1114m带动第二阻尼轮1114p转动,第二阻尼轮1114p带动齿条1114q沿滑槽运动,弹簧1114r伸长,限位凸起1114h沿限位滑槽1114s运动,当限位凸起1114h运动至限位滑槽1114s的端部时,齿条1114q在滑槽内停止运动,即第二阻尼轮1114p停止在第二容纳槽内的转动,第二阻尼轮1114p和第三阻尼轴1114m之间相对转动,此时,齿条1114q的端部插入第三限位槽1114k内。参见图9,此时,当第二阻尼轴1114a继续转动时,在齿条1114q的作用下,齿条1114q将带动驱动轮1114e转动,当驱动轮1114e和传动带1113n的一侧抵接时,驱动轮1114e将对传动带1113n的一侧施加向上的作用力。当第二滚轮1113d和第一阻尼轴1113p之间存在阻尼油时,第二滚轮1113d和第一阻尼轴1113p之间存在阻尼,即当传动带1113n的一侧受到向上的作用力时,第二滚轮1113d和第一阻尼轴1113p之间几乎不相对转动,向上的作用力驱使滑动座1113c向上运动,直至第二滚轮1113d和第一滚轮1113a的下侧抵接。当第二滚轮1113d和第一滚轮1113a抵接时,滑动座1113c无法继续向上运动,此时,驱动轮1114e对传动带1113n的力将克服阻尼驱动传动带1113n转动,参见图10,传动带1113n带动第二滚轮1113d转动,第二滚轮1113d带动第一滚轮1113a转动,从而驱使机器人11沿避雷线200运动。
40.当驱动装置1114停止运行时,具体过程为,电机停止运行,在弹簧1114r的作用下,齿条1114q向滑槽内运动,齿条1114q和第三限位槽1114k脱开,在滑动座1113c的重力作用下,滑动座1113c向下运动,第二滚轮1113d和第一滚轮1113a脱开,在重块1114d的重力作用下,重块1114d拉动拉绳1115a向下运动,直至重块1114d临近地面。
41.应当理解的是,对于本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1