一种ANPC三电平控制方法与流程
一种anpc三电平控制方法
技术领域
1.本发明涉及三电平控制技术领域,具体涉及一种anpc三电平控制方法。
背景技术:
2.随着新能源产业的蓬勃发展,更高电压水平的电力电子变流器得到越来越广泛的应用,三电平变流器通过低压开关器件的串并联,就可以做到更高的电压等级,更多的输出电平数,更小的电压谐波,同时也满足大功率的应用场合,是目前新能源变流器的发展趋势。
3.但anpc三电平由于开关管多,空间矢量控制算法复杂,通常使用dsp处理器来进行大量的三角函数运算,同时使用dsp处理器配套的专用pwm定时器来产生开关管开关信号,控制算法复杂,常常需要专用的dsp芯片和pwm外设,不便于推广。
技术实现要素:
4.本发明所要解决的技术问题是控制算法复杂,需要专用外设才能实现控制处理,目的在于提供一种anpc三电平控制方法,实现了算法的优化,anpc三电平的控制无需受外设的约束,提高了可移植性和复用性,便于推广使用。
5.本发明通过下述技术方案实现:
6.一种anpc三电平控制方法,包括以下步骤:
7.获取采样信号和三角载波信号,对上述采样信号进行模数转换,得到数字采样信号;
8.对上述数字采样信号依次进行clark变换、归一化处理和gh坐标变换,得到具有参考电压矢量的空间矢量图;
9.根据上述参考电压矢量在空间矢量图中的坐标,计算上述参考电压矢量的基本矢量,上述基本矢量构成开关矢量序列;
10.根据上述基本矢量和三角载波周期,计算上述基本矢量的作用时间,得到作用时间信号;
11.根据上述作用时间信号和开关矢量序列,计算每相桥臂中上管和下管的开关时间,得到开关时间信号;
12.将上述开关时间信号与三角载波信号进行比较,得到每相桥臂中各开关管的开关状态信号;
13.将死区插入上述开关状态信号中,得到每相桥臂中各开关管的开关控制信号;
14.根据上述开关控制信号控制anpc三电平的输出值。
15.将经过clark变换的数字信号进行归一化处理,使归一化后的值落在空间矢量图的正六边形区域内,使得后续的计算与直流母线电压不存在直接计算关系;将经过归一化处理后的数字信号进行gh坐标变换,在gh坐标系下计算上述参考电压矢量的基本矢量,避免了复杂的三角函数运算,简化了控制算法;
16.上述基本矢量的作用时间直接根据基本矢量和三角载波周期计算,避免了复杂的三角函数运算,进一步简化了控制算法,实现了算法的优化,anpc三电平的控制无需受外部设备的约束,提高了可移植性和复用性,便于推广使用。
17.进一步的,上述采样信号包括三相电压和母线电压。
18.进一步的,在对上述数字采样信号进行clark变换之前,还利用三相锁相环对数字采样信号进行锁相,得到输入相位角θ。
19.进一步的,利用输入相位角θ实现三相电压矢量的定向内环控制,得到同步旋转坐标系下的三相参考电压,再利用输入相位角θ进行park-clark变换,得到静止坐标系下的输出参考电压。
20.进一步的,上述归一化处理包括以下步骤:
21.设置上述归一化处理的单位长度为小矢量,上述小矢量的模长为倍的母线电压;
22.将上述输出参考电压除以小矢量,得到上述归一化处理后的输出参考电压。
23.将上述输出参考电压进行归一化处理,使归一化后的输出参考电压落在空间矢量图的正六边形区域内;经过上述归一化处理后,后续作用时间、开关时间的计算与直流母线电压不存在直接计算关系,简化了控制算法。
24.进一步的,上述gh坐标变换包括以下步骤:
25.计算上述输出参考电压在gh坐标系下的投影,得到参考电压矢量,计算公式如下:
[0026][0027]
其中,ug表示输出参考电压在g坐标轴上的投影坐标;uh表示输出参考电压在h坐标轴上的投影坐标;u
α
表示三相电压在α坐标轴上的投影坐标;u
β
表示三相电压在β坐标轴上的投影坐标;ua、ub和uc表示三相电压。
[0028]
将经过归一化处理后的输出参考电压进行gh坐标变换,在gh坐标系下计算上述参考电压矢量的基本矢量,避免了复杂的三角函数运算,简化了控制算法。
[0029]
进一步的,上述基本矢量包括三个,计算上述参考电压矢量的基本矢量包括以下步骤:
[0030]
对上述参考电压矢量的坐标进行入整运算和舍整运算,得到上述参考电压矢量的四个基本空间矢量;
[0031]
分别计算上述参考电压矢量与基本空间矢量之间的差值,选择出三个差值较小的基本空间矢量,上述选择出的三个基本空间矢量作为上述参考电压矢量的基本矢量。
[0032]
计算上述参考电压矢量的基本矢量时,先采用入整运算和舍整运算得到基本空间矢量,再根据上述基本空间矢量与参考电压矢量之间的距离,选择基本矢量,算法简单,进一步简化了控制算法。
[0033]
进一步的,上述开关矢量序列为中心对称的七段式,上述开关矢量序列的起始矢
量为小矢量。
[0034]
上述开关矢量序列为七段式的中心对称上升沿脉冲,在一个开关周期内,基本矢量是对称的,发波对称、相位对齐、谐波含量较小,减小了调制过程中产生的谐波;上述七段式调制具有中性点电压控制能力强的优势;
[0035]
上述开关矢量序列的起始矢量均为小矢量,且开关矢量序列为中心对称,所以结束矢量也为小矢量,上述起始矢量和结束矢量均为小矢量,在扇区切换时不存在额外的开关动作,有效地避免了扇区切换过程中的电压矢量突变,由于中心对称,可以利用三角载波来实现开关状态的判断。
[0036]
进一步的,根据上述基本矢量和三角载波周期,计算上述基本矢量的作用时间,计算公式如下:
[0037][0038]
其中,u
gh
表示三相电压在gh坐标系下的合矢量,ts表示三角载波周期,u1、u2、u3分别表示三个基本矢量,t1表示基本矢量u1的作用时间,t2表示基本矢量u2的作用时间,t3表示基本矢量u3的作用时间。
[0039]
上述基本矢量的作用时间的算法简单,简化了控制算法。
[0040]
进一步的,将上述开关时间信号与三角载波信号进行比较之后,对上管和下管的开关状态信号进行互补,得到每相桥臂中各开关管的开关状态信号,便于后续每相桥臂中各开关管的开关控制信号的计算。
[0041]
本发明与现有技术相比,具有如下的优点和有益效果:
[0042]
将经过clark变换的数字信号进行归一化处理,使归一化后的值落在空间矢量图中,使得后续作用时间、开关时间的计算与直流母线电压不存在直接计算关系,简化了控制算法;将经过归一化处理后的数字信号进行gh坐标变换,在gh坐标系下计算上述参考电压矢量的基本矢量,避免了复杂的三角函数运算,简化了控制算法;
[0043]
上述基本矢量的作用时间直接根据基本矢量和三角载波周期计算,避免了复杂的三角函数运算,进一步简化了控制算法;
[0044]
上述均简化了控制算法,实现了算法的优化,使得anpc三电平的控制无需受外部设备的约束,提高了可移植性和复用性,便于推广使用。
附图说明
[0045]
为了更清楚地说明本发明示例性实施方式的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。在附图中:
[0046]
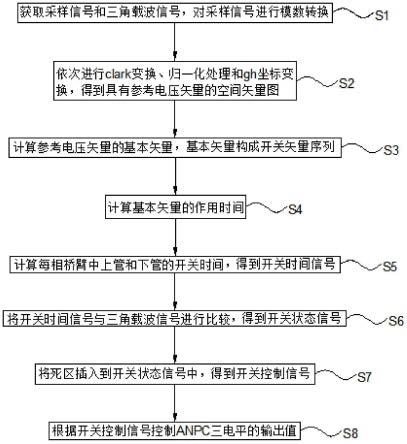
图1为实施例1提供的流程图;
[0047]
图2为实施例2提供的空间矢量图;
[0048]
图3为实施例2提供的参考电压矢量在空间矢量图中的位置;
[0049]
图4为实施例2提供的开关矢量序列图。
具体实施方式
[0050]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
[0051]
实施例1
[0052]
本实施例1提供一种anpc三电平控制方法,如图1所示,包括以下步骤:
[0053]
s1、获取采样信号和三角载波信号,对上述采样信号进行模数转换,得到数字采样信号;
[0054]
s2、对上述数字采样信号依次进行clark变换、归一化处理和gh坐标变换,得到具有参考电压矢量的空间矢量图;
[0055]
s3、根据上述参考电压矢量在空间矢量图中的坐标,计算上述参考电压矢量的基本矢量,上述基本矢量构成开关矢量序列;
[0056]
s4、根据上述基本矢量和三角载波周期,计算上述基本矢量的作用时间,得到作用时间信号;
[0057]
s5、根据上述作用时间信号和开关矢量序列,计算每相桥臂中上管和下管的开关时间,得到开关时间信号;
[0058]
s6、将上述开关时间信号与三角载波信号进行比较,得到每相桥臂中各开关管的开关状态信号;
[0059]
s7、将死区插入上述开关状态信号中,得到每相桥臂中各开关管的开关控制信号;
[0060]
s8、根据上述开关控制信号控制anpc三电平的输出值。
[0061]
将经过clark变换的数字信号进行归一化处理,使归一化后的值落在空间矢量图的正六边形区域内,使得后续的计算与直流母线电压不存在直接计算关系;将经过归一化处理后的数字信号进行gh坐标变换,在gh坐标系下计算上述参考电压矢量的基本矢量,避免了复杂的三角函数运算,简化了控制算法;
[0062]
上述基本矢量的作用时间直接根据基本矢量和三角载波周期计算,避免了复杂的三角函数运算,进一步简化了控制算法,实现了算法的优化,anpc三电平的控制无需受外部设备的约束,提高了可移植性和复用性,便于推广使用。
[0063]
具体的实施例,上述三角载波周期ts为开关管的开关频率;上述采样信号包括三相电压和母线电压。
[0064]
具体的实施例,上述clark变换的作用对象是数字采样信号中的三相电压,在对上述数字采样信号中的三相电压进行clark变换之前,利用三相锁相环对数字采样信号进行锁相,得到输入相位角θ;
[0065]
利用输入相位角θ实现三相电压矢量的定向内环控制,得到同步旋转坐标系下的三相参考电压,再利用输入相位角θ进行park-clark变换,得到静止坐标系下的输出参考电压u
α
和u
β
。
[0066]
具体的实施例,上述归一化处理包括以下步骤:
[0067]
设置上述归一化处理的单位长度为小矢量,上述小矢量的模长为倍的母线电压;
[0068]
将上述输出参考电压除以小矢量,得到上述归一化处理后的输出参考电压;
[0069]
上述归一化处理的公式如下:
[0070][0071]
其中,u(k)表示三相电压的空间矢量,u
dc
表示母线电压,ua、ub、uc表示三相电压,
[0072]
将上述输出参考电压进行归一化处理,使归一化后的输出参考电压落在空间矢量图的正六边形区域内;考虑到设备运行时直流母线电压可能不稳定的情况,经过上述归一化处理后,后续作用时间、开关时间的计算与直流母线电压不存在直接计算关系,简化了控制算法。
[0073]
具体的实施例,上述gh坐标变换包括以下步骤:
[0074]
计算上述输出参考电压在gh坐标系下的投影,得到参考电压矢量,计算公式如下:
[0075][0076]
其中,ug表示输出参考电压在g坐标轴上的投影坐标;uh表示输出参考电压在h坐标轴上的投影坐标;u
α
表示三相电压在α坐标轴上的投影坐标;u
β
表示三相电压在β坐标轴上的投影坐标;ua、ub和uc表示三相电压。
[0077]
将经过归一化处理后的输出参考电压进行gh坐标变换,在gh坐标系下计算上述参考电压矢量的基本矢量,避免了复杂的三角函数运算,简化了控制算法。
[0078]
具体的实施例,上述基本矢量包括三个,计算上述参考电压矢量的基本矢量包括以下步骤:
[0079]
对上述参考电压矢量的坐标进行入整运算和舍整运算,得到上述参考电压矢量的四个基本空间矢量;
[0080]
分别计算上述参考电压矢量与基本空间矢量之间的差值,选择出三个差值较小的基本空间矢量,上述选择出的三个基本空间矢量作为上述参考电压矢量的基本矢量。
[0081]
计算上述参考电压矢量的基本矢量时,先采用入整运算和舍整运算得到基本空间矢量,再根据上述基本空间矢量与参考电压矢量之间的距离,选择基本矢量,算法简单,进一步简化了控制算法。
[0082]
具体的实施例,上述开关矢量序列为中心对称的七段式,上述开关矢量序列的起始矢量为小矢量。
[0083]
上述开关矢量序列为七段式的中心对称上升沿脉冲,在一个开关周期内,基本矢量是对称的,发波对称、相位对齐、谐波含量较小,减小了调制过程中产生的谐波;上述七段式调制具有中性点电压控制能力强的优势;
[0084]
上述开关矢量序列的起始矢量均为小矢量,且开关矢量序列为中心对称,所以结束矢量也为小矢量,上述起始矢量和结束矢量均为小矢量,在扇区切换时不存在额外的开关动作,有效地避免了扇区切换过程中的电压矢量突变,由于中心对称,所以可以利用三角
载波来实现开关状态的判断。
[0085]
具体的实施例,根据上述基本矢量和三角载波周期,计算上述基本矢量的作用时间,计算公式如下:
[0086][0087]
其中,u
gh
表示三相电压在gh坐标系下的合矢量,ts表示三角载波周期,u1、u2、u3分别表示三个基本矢量,t1表示基本矢量u1的作用时间,t2表示基本矢量u2的作用时间,t3表示基本矢量u3的作用时间。
[0088]
上述基本矢量的作用时间的算法简单,简化了控制算法。
[0089]
具体的实施例,将上述开关时间信号与三角载波信号进行比较之后,对上管和下管的开关状态信号进行互补,得到每相桥臂中各开关管的开关状态信号,便于后续每相桥臂中各开关管的开关控制信号的计算。
[0090]
实施例2
[0091]
如图2所示,将上述空间矢量图划分为6个第一扇区(a~f),上述第一扇区划分为4个第二扇区((a1~a4)~(f1~f4)),上述第一扇区和第二扇区的形状均为正三角形;若上述参考电压矢量的坐标为如图3所示,根据空间矢量图可以确定,上述参考电压矢量在第f1扇区,那么与上述参考电压矢量最近的三个基本矢量为:u1=u
h1
、u2=u
h2
、u3=u0。
[0092]
具体的实施例,根据上述基本矢量和参考电压矢量的坐标,计算上述基本矢量的作用时间:
[0093][0094]
具体的实施例,根据开关矢量序列和基本矢量的作用时间,计算每相桥臂中上管和下管的开关时间,上述开关矢量序列为onn ono ooo poo ooo ono onn,上述onn矢量的作用时间为t1,上述ono矢量的作用时间为t2,上述ooo矢量的作用时间为t3,如图4所示,可推出每相桥臂中上管和下管的开关时间:
[0095]qa1
在和后输出高电平p;q
a4
不输出低电平n;q
b1
不输出高电平p;q
b4
在和后输出电平o;q
c1
不输出高电平p;q
c4
在后输出电平o;得到以下公式:
[0096][0097]
其中,q
a1
、q
b1
、q
c1
表示三相电压中上管的开关时间,q
a4
、q
b4
、q
c4
表示三相电压中下管的开关时间。
[0098]
该anpc三电平在输出0电平时,同时开通两个内管和两个中点钳位管,使中点电流有两个并行的流通路径,降低了输出0电平时的通态损耗。
[0099]
具体的实施例,将上述上管和下管的开关时间与三角载波信号进行比较,得到每相桥臂中上管的开关状态信号s1和下管的开关状态信号s4,再利用死区对s1和s4进行互补操作,使得开关管v1和v3、v5互补,v4和v2、v6互补,得到每相桥臂中6个开关管的开关状态s1~s6,再在s1和s2/s6之间插入死区,在s4和s3/s5之间插入死区,组成过渡状态,避免开关管直通的危险,得到开关控制信号sd1~sd6。
[0100]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1