一种越障除冰机器人及其越障方法和除冰方法
1.本发明涉及电力线路故障检修技术领域,尤其是涉及一种越障除冰机器人及其越障方法和除冰方法。
背景技术:
2.近年来,国内大面积的输电线路覆冰灾害频繁发生,四川贵州、江西、浙江、河南和陕西等省份都曾因风雪、冻雨等极端天气致使输电线路严重覆冰,造成断线、倒塌、覆冰闪络等事故。目前,覆冰情况下,采用直流融冰方式可以有效解决导线覆冰,而地线由于连接方式不同,无法采用直流融冰方式解决,只能依靠自然融冰和人工除冰的方式。如果天气状况不佳或持续覆冰,极大可能引起地线断线从而导致线路停役,且抢修困难、工艺复杂。对于较为严重的导线覆冰,一般以人工上线除冰最为有效,但人工除冰危险性很高且效率较低。因此地线除冰机器人具有很大的应用前景,可以带来的社会效益和经济效益。
3.目前国内外已有一些不同类型的输电线路除冰机器人,它们可以完成一定程度的除冰任务,有一定的越障能力,但在面临地线严重覆冰时依旧有卡死或者除冰效果不佳等问题,而且在越障过程中,面对双挂点和三角连板以及相邻地线不能刚性相连等问题时,不能有效地越障,为了提高电力线路维护的效率和智能化程度,解决该问题势在必行。
技术实现要素:
4.本发明是为了克服上述现有技术中地线严重覆冰时现有的越障除冰机器人存在卡死、除冰效果不佳,且在越障过程中不能有效越障等问题,提供一种越障除冰机器人及其越障方法和除冰方法,具有良好的除冰效果、避免越障除冰机器人在除冰过程中卡死、实现有效越障,还有利于保持越障除冰机器人在地线上的稳定性。
5.为了实现上述目的,本发明采用以下技术方案:一种越障除冰机器人,包括机架,冲击除冰机构,所述冲击除冰机构滑动设于机架上方,所述冲击除冰机构包括除冰冲头、用于连接除冰冲头的传动轴和用于实现除冰冲头旋转的旋转轴;越障机构,所述越障机构包括行进机构和设于行进机构下方的夹紧固定机构,所述行进机构包括设于机架顶部的行进轮和用于驱动行进轮前进的行进轮驱动电机,所述夹紧固定机构包括夹紧轮组件和用于驱动夹紧轮组件在机架上滑移的电动推杆,所述行进轮成对设置,所述冲击除冰机构设于成对的两个行进轮之间,所述越障机构与冲击除冰机构配合去除线缆覆冰;驱动系统,所述驱动系统包括用于驱动除冰机构的除冰驱动组件、用于驱动行进轮转动的行进驱动电机;监测机构,所述监测机构包括固定在机架上的摄像头;控制系统,所述控制系统用于控制越障机构和冲击除冰机构工作状态;电源系统,所述电源系统用于为冲击除冰机构、越障结构、监测机构、控制系统和驱动系统提供电力供应。
6.作为优选,所述传动轴两端均设有除冰冲头,所述除冰驱动组件包括用于驱动传动轴旋转的第一电机和用于驱动旋转轴旋转的第二电机,所述第二电机驱动旋转轴旋转以使除冰冲头高速旋转。
7.作为优选,所述机架包括摄像头支架、防护组件,防护组件包括电气箱体、防护上板,所述防护上板设于电气箱体顶部,所述防护侧板倾斜设置。
8.作为优选,所述行进轮包括第一行进轮和第二行进轮,所述行进轮驱动电机包括用于驱动第一行进轮的第一驱动电机和用于驱动第二行进轮的第二驱动电机,所述第一行进轮和第二行进轮分别设于冲击除冰机构两侧。
9.作为优选,所述第一行进轮和第二行进轮均设有内层凹槽和外层凹槽,所述内层凹槽用于包裹地线,所述外层凹槽用于与夹紧固定机构配合以夹紧线缆。
10.作为优选,所述夹紧轮组件包括设于第一行进轮下方的第一夹紧轮组件和设于第二行进轮下方的第二夹紧轮组件,电动推杆包括用于推动第一夹紧轮组件在机架上滑移的第一电动推杆和用于推动第二夹紧轮组件在机架上滑移第二电动推杆,所述第一夹紧轮组件包括成对设置的第一夹紧轮和用于固定第一夹紧轮的第一支撑座,所述第二夹紧轮组件包括成对设置的第二夹紧轮和用于固定第二夹紧轮的第二支撑座。
11.作为优选,所述越障除冰机器人还包括越障辅助夹紧机构,越障辅助夹紧机构包括辅助支架、第三夹紧轮组件和联动结构,第三夹紧轮组件滑动设置在辅助支架上,所述联动结构包括第一连杆、转动杆,所述辅助支架设有滑轨,所述第一连杆两端分别与第三夹紧轮组件和夹紧固定机构上的其中一个夹紧轮组件转动连接,所述转动杆一端转动连接在第一连杆上,另一端滑动设置在辅助支架的滑轨内,滑轨的上端设有用于卡接转动杆的弹性卡接片。
12.作为优选,第二夹紧轮上升至嵌设在第二行进轮内的状态时,所述转动杆通过弹性卡接片卡接在滑轨上端,所述第三夹紧轮组件随第二夹紧轮组件下降而上升,或者所述第三夹紧轮组件随第二夹紧轮组件上升而下降。
13.为实现本发明的发明目的,本发明采用另一种技术方案是:一种越障除冰机器人的除冰方法,通过上述一种越障除冰机器人进行除冰工作,包括以下步骤:步骤一:越障除冰机器人进入覆冰地线,冲击除冰机构根据监测机构检测到的地线下方覆冰厚度调整倾斜角度;步骤二:越障除冰机器人进入除冰工作状态;步骤三:第一行进轮进入地线,整个越障除冰机器人完全悬挂在地线上,调整冲击除冰机构的角度,使除冰冲头可以垂直冲击地线下方的冰层;步骤四:第二行进轮进入地线,第二夹紧轮组件通过第二电动推杆上升高度配合第二行进轮的外部凹槽夹住地线,保持越障除冰机器人稳定;步骤五:第一行进轮提供动力促使越障除冰机器人前进,地线表面剩余冰层通过第二行进轮碾压除冰,完成覆冰地线上的除冰工作。
14.一种越障除冰机器人的越障方法,通过上述一种越障除冰机器人进行越障工作,包括以下步骤:s1:在直线塔上设置辅助越障轨道,辅助越障轨道包括a段、b段、c段、d段和e段;s2:爬升阶段,所述越障除冰机器人将越过与地线无机械联接的辅助越障轨道的a
段,第一夹紧轮和第二夹紧轮分别嵌设在第一行进轮和第二行进轮内,第一驱动电机和第二驱动电机分别驱动第一行进轮和第二行进轮旋转,使第一行进轮和第二行进轮提供动力;s3:转弯阶段,此过程越障除冰机器人需要越过辅助越障轨道b段,在a段和b段的交接处、b段和c段的交接处均存在一定的弯曲弧度,第一电动推杆和第二电动推杆分别控制第一夹紧轮组件和第二夹紧轮组件下降便于越过障碍物;s4:直线阶段,越障除冰机器人需要越过越障轨道c段,通过第一行进轮和第二行进轮提供前进的动力;s5:转弯阶段,越障除冰机器人需要越过辅助越障轨道d段,在c段和d段的交接处、d段和e段的交接处均存在一定的弯曲弧度,第一行进轮和第二行进轮提供前进的动力;s6:入线阶段,越障机器人越过辅助越障轨道e段,再次进入地线,越障完成。
15.因此,本发明具有如下有益效果:(1)具有良好的除冰效果、避免越障除冰机器人在除冰过程中卡死、实现有效越障;(2)行进轮采用双凹槽防滑设计,行进轮具有双层凹槽,里层凹槽用以有效包裹地线,外层凹槽与夹紧轮一起包裹夹紧地线覆冰体,使得除冰机器人既可以稳定地悬挂在去除覆冰的地线之上,也可以稳定地悬挂于去除覆冰或无冰的地线之上,不会发生脱线并正常行走;此外行进轮利用内部凹槽深度大和表面有防滑纹路的特点,还可以碾除地线上层的冰层,具有除冰功能;(3)防护上板和电气箱体的顶板之间形成一定的倾斜角度,地线掉落的冰层可以沿着机架防护上板滑落,避免掉落的冰层堆积在越障除冰机器人上,减少越障除冰机器人的重量进而减小地线的负担;(4)冲击除冰机构的除冰冲头采用平口设计,增大和冰层表面的接触面积,这样可以增大作用力,并且不同于其他弹簧式冲击除冰机构的敲击方式,敲击方式作用力具有大小不连续性和方向不稳定的特点,但是旋转式冲击除冰机构通过电机控制旋转轴使得除冰冲头高速旋转,产生连续并且稳定的冲击力,因此具有良好的除冰效果;(5)除冰冲头作用在地线下方,垂直冲击地线下方的冰层,利用地线覆冰力学特性,可以去除大部分冰层,地线上表面剩余冰层被行进轮碾除,实现冲击除冰和碾压除冰相结合的组合除冰方法;在地线下表面严重覆冰的情况下,冲击除冰机构可以旋转角度,方便除冰机器人上线,防止除冰机器人卡死在地线;(6)夹紧机构保持除冰机器人稳定,行进机构提供前进动力,为冲击除冰机构提供稳定的除冰环境,三个机构相互配合,共同完成除冰工作;(7)联动结构使得第三夹紧轮组件和第二夹紧轮组件通过联动结构实现同步升降,当遇到障碍时,第二夹紧轮组件先下降,在联动结构作用下,第三夹紧轮组件上升直至第三夹紧轮组件与第二行进轮上下交错夹紧,保持越障除冰机器人在地线或辅助越障机构上的稳固。
附图说明
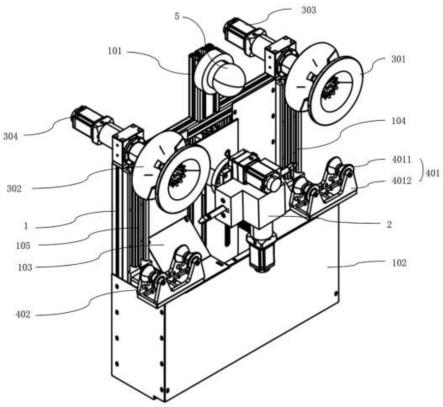
16.图1是一种越障除冰机器人的一种结构示意图;
图2是一种越障除冰机器人去除电气箱体后的结构示意图;图3是越障除冰机器人的正视图;图4是越障除冰机器人的侧视图;图5是越障除冰机器人在行进轮处的局部结构示意图;图6是冲击除冰机构的结构示意图;图7是实施例5中越障除冰机器人的结构示意图;图8是图7的a部放大图;图9是图7中第三夹紧轮组件和第二夹紧轮组件连接处的结构示意图;图10是越障除冰机器人在进入辅助越障轨道时的结构示意图;图中:1、机架 101、摄像头支架 102、电气箱体 103、防护上板 104、第一直线导轨 105、第二直线导轨 2、冲击除冰机构 201、除冰冲头 202、传动轴 203、第一除冰电机 204、第二除冰电机 205、旋转轴 301、第一行进轮 302、第二行进轮 303、第一驱动电机 304、第二驱动电机 401、第一夹紧轮组件 4011、第一夹紧轮 4012、第一支撑座 402、第二夹紧轮组件 4021、第二夹紧轮 4022、第二支撑座 403、第一电动推杆 404、第二电动推杆 5、摄像头 6、电源系统 7、辅助越障轨道 701、连接杆 8、辅助支架 801、滑槽 802、弹性块 803、弹性卡接片 804、滑轨 9、第三夹紧轮组件 901、第三支架 902、第三夹紧轮 10、联动结构 1001、第一连杆 1002、第二连杆 1003、第三连杆 1004、转动杆 11、地线。
具体实施方式
17.下面结合附图与具体实施方式对本发明做进一步的描述。
18.实施例1:如图1、图2所示,一种越障除冰机器人,其包括机架1、冲击除冰机构2、越障机构、监测机构、控制系统和电源系统6。机架1用于支撑整个越障除冰机器人,机架1包括摄像头5支架101、防护组件,防护组件包括102、防护上板103,其中控制系统和电源系统6均设于102内,防护上板103设于102顶部,防护上板103倾斜设置,在防护上板103和102的顶板之间形成一定的倾斜角度,地线11掉落的冰层可以沿着机架1防护上板103滑落,避免掉落的冰层堆积在越障除冰机器人上,减少越障除冰机器人的重量进而减小地线11的负担。
19.如图6所示,冲击除冰机构2滑动设置在机架1上,且冲击除冰机构2设于机架1的中间位置,冲击除冰机构2包括除冰冲头201和除冰驱动组件,除冰驱动组件包括实现除冰冲头201冲击除冰的传动轴202和第一除冰电机203,传动轴202连接除冰冲头201,第一除冰电机203用于驱动传动轴202;除冰驱动组件还包括旋转轴205和第二除冰电机204,第二除冰电机204驱动旋转轴205旋转使得除冰冲头201的角度发生变化,避免越障除冰机器人在除冰过程中被冰层卡死。在传动轴202的两端均设有除冰冲头201以实现双向除冰,除冰冲头201采用平口设计以增大和冰层表面的接触面积,增大作用力,提高除冰效果,传动轴202用于旋转除冰冲头201,改变其平口的角度。
20.如图3、图4所示,越障机构包括行进机构和夹紧固定机构,行进机构为越障除冰机器人提供前进的动力,夹紧固定机构与行进机构配合以使越障除冰机器人在地线11上保持稳定。
21.如图5所示,行进机构包括行进轮和用于驱动行进轮前进的行进轮驱动电机,所述
行进轮通过底座和机架1相连,行进轮具有双层凹槽,即行进轮上设有内层凹槽和外层凹槽,内层凹槽用于包裹地线11,外层凹槽与夹紧固定机构配合一起包裹夹紧线缆,本实施例中的线缆为地线11,使得越障除冰机器人既可以稳定地悬挂在去除覆冰的地线11之上,也可以稳定地悬挂于去除覆冰或无冰的地线11之上,不会发生脱线并正常行走。在行进轮上设有包边结构,包边结构足够长,使行进轮可以直接碾过地线11上的防震锤等障碍。此外,行进轮与地线11接触的表面还设有防滑纹路,防滑纹路的设置提高了行进轮和地线11之间的摩擦力,降低行进轮在地线11上打滑的概率,同时防滑纹路的设置还有利于行进轮碾除地线11上的冰层。
22.行进轮成对设置,行进轮包括第一行进轮301和第二行进轮302,冲击除冰机构2设置在第一行进轮301和第二行进轮302之间。行进轮驱动电机包括第一驱动电机303和第二驱动电机304,第一驱动电机303和第二驱动电机304分别用于驱动第一行进轮301和第二行进轮302。
23.夹紧固定机构包括成对设置的夹紧轮组件和用于驱动夹紧轮在机架1上滑移的电动推杆,在本市实施例中,夹紧轮组件和电动推杆均成对设置,即夹紧固定机构具体包括第一夹紧轮组件401、第二夹紧轮组件402、第一电动推杆403和第二电动推杆404,第一夹紧轮组件401和第二夹紧轮组件402分别设置在成对的两个行进轮下方,机架1上设有第一直线导轨104和第二直线导轨105,第一夹紧轮组件401滑动设于第一直线导轨104上,第二夹紧轮组件402滑动设于第二直线导轨105上,第一电动推杆403连接在第一夹紧轮组件401的底部以驱动第一夹紧轮组件401在第一直线导轨104上滑移,实现第一夹紧轮组件401的升降;第二电动推杆404连接在第二夹紧轮组件402的底部以驱动第二夹紧轮组件402在第二直线导轨105上滑移,实现第二夹紧轮组件402的升降。
24.第一夹紧轮组件401包括成对设置的第一夹紧轮4011、用于固定第一夹紧轮4011的第一支撑座4012,成对的两个第一夹紧轮4011分别设置在第一支撑座4012的两侧,在第一支撑座4012的背部设有与第一直线导轨104配合的第一滑块,第一夹紧轮组件401通过第一滑块滑动设置在第一直线导轨104上。第一行进轮301上设有外层凹槽,使得第一夹紧轮4011完全嵌入到行进轮中夹紧地线11,保持越障除冰机器人的稳定。
25.第二夹紧轮组件402包括成对设置的第二夹紧轮4021、用于固定第二夹紧轮4021的第二支撑座4022,成对的两个第二夹紧轮4021分别设置在第二支撑座4022的两侧,在第二支撑座4022的背部设有与第二直线导轨105配合的第二滑块,第二夹紧轮组件402通过第二滑块滑动设置在第二直线导轨105上。第二行进轮302上也设有外层凹槽,使得第二夹紧轮4021完全嵌入到行进轮中夹紧地线11,保持越障除冰机器人的稳定。
26.监测机构包括摄像头5,摄像头5安装在摄像头5支架101上,摄像头5用于实时查看地线11覆冰情况以及冰机器人除冰效果;控制系统用于与监测机构配合以控制越障除冰机器人的运行状态,以实现人机交互;电源系统6用于为冲击除冰机构2、越障结构、监测机构和控制系统提供电力供应,在本实施例中,电源系统6采用三块大容量锂电池,增加续航能力。
27.另外,本实施例中,控制系统还用于控制各驱动组件,即控制系统控制第一除冰电机203和第二除冰电机204旋转,以促使冲击除冰机器人进行除冰工作;控制系统控制行进轮驱动组件运行以驱动行进轮转动,为越障除冰机器人提供前进的动力;控制系统还控制
第一电动推杆403和第二电动推杆404以驱动第一夹紧组件和第二夹紧组件在机架1上滑移。
28.实施例2:实施例2为实施例1中一种越障除冰机器人的除冰方法,包括以下步骤:步骤一:越障除冰机器人进入覆冰地线11,冲击除冰机构2根据监测机构检测到的地线11下方覆冰厚度调整倾斜角度;步骤二:越障除冰机器人进入除冰工作状态;步骤三:第一行进轮301进入地线11,整个越障除冰机器人完全悬挂在地线11上,调整冲击除冰机构2的角度,使除冰冲头201可以垂直冲击地线11下方的冰层;步骤四:第二行进轮302进入地线11,第二夹紧轮组件402通过第二电动推杆404上升高度配合第二行进轮302的外部凹槽夹住地线11,保持越障除冰机器人稳定;步骤五:第一行进轮301提供动力促使越障除冰机器人前进,地线11表面剩余冰层通过第二行进轮302碾压除冰,完成覆冰地线11上的除冰工作。
29.在上述除冰方法中,冲击除冰机构2提供破冰、除冰的冲击力,即除冰冲头201作用在地线11下方,垂直冲击地线11下方的冰层,利用地线11覆冰力学特性,可以去除大部分冰层,而地线11上表面剩余冰层被行进轮碾除,实现冲击除冰和碾压除冰相结合的组合除冰方法,有效去除地线11覆冰,且在本技术方案中,三个机构相互配合,即利用行进轮提供前进动力,利用夹紧固定机构提供夹紧力保持越障除冰机器人平衡,为冲击除冰机构2提供稳定的除冰条件。
30.在步骤一中,在地线11覆冰严重的情况下,通过冲击除冰机构2旋转角度,方便越障除冰机器人上线,防止越障除冰机器人卡死在地线11上,而且可以立即进入除冰工作状态。
31.在步骤三中,在第一行进轮301进入地线11时,整个除冰机器人完全悬挂在地线11之上,此时再调整冲击除冰机构2的角度,使得除冰冲头201可以垂直的冲击地线11下方冰层。另外,本实施例中通过冲击除冰机构2对地线11上的覆冰进行冲击除冰,现有技术中弹簧式冲击除冰机构2的敲击方式,敲击方式作用力具有大小不连续性和方向不稳定的特点,而本技术除了可以垂直冲击地线11下方的冰层进行除冰外,还可以通过电机控制旋转轴205使得除冰冲头201高速旋转,产生连续并且稳定的冲击力,因此具有良好的除冰效果。
32.在步骤四中,夹紧轮组件可以通过电动推杆调节高度,当第二行进轮302进入地线11时,第二电动推杆404推动第二夹紧轮组件402上升直至第二夹紧轮4021嵌入到第二行进轮302中,从而夹紧地线11保持越障除冰机器人的稳定、同时去除地线11上残留的冰层并保持机器人平衡。
33.此外,在步骤五中,当冲击除冰机器人旋转卡死在地线11覆冰上时,通过行进机构驱动越障除冰机器人后退,在通过第二除冰电机204驱动旋转轴205旋转以使冲击除冰机器人更换冲击角度,避免卡死。
34.实施例3:如图10所示,实施例3为实施例1中一种越障除冰机器人的越障方法,本实施例中,越障除冰机器人对直线塔进行越障,越障除冰机器人处于越障的工作状态,针对直线塔具有双挂点和三角连板的特性以及耐张塔的悬挂特性,通过行进轮的包边和夹紧轮升降动作
相互配合,可以灵巧地跨越与地线11无机械连接的辅助越障轨道,实现直线塔及耐张塔的越障功能。越障除冰机器人的越障方法具体包括以下步骤:s1:在直线塔上设置辅助越障轨道,辅助越障轨道包括a段、b段、c段、d段和e段;s2:爬升阶段,越障除冰机器人将越过与地线11无机械联接的辅助越障轨道的a段,第一夹紧轮4011和第二夹紧轮4021分别嵌设在第一行进轮301和第二行进轮302内,且第一驱动电机303和第二驱动电机304分别驱动第一行进轮301和第二行进轮302旋转,使第一行进轮301和第二行进轮302提供动力;s3:转弯阶段,此过程越障除冰机器人需要越过辅助越障轨道b段,在a段和b段的交接处、b段和c段的交接处均存在一定的弯曲弧度,第一电动推杆403和第二电动推杆404分别控制第一夹紧轮组件401和第二夹紧轮组件402使其下降便于越过障碍物;s4:直线阶段,越障除冰机器人需要越过越障轨道c段,通过第一行进轮301和第二行进轮302提供前进的动力;s5:转弯阶段,此过程越障除冰机器人需要越过辅助越障轨道d段,在c段和d段的交接处、d段和e段的交接处均存在一定的弯曲弧度,第一行进轮301和第二行进轮302提供前进的动力;s6:入线阶段,越障机器人越过辅助越障轨道e段,再次进入地线11,越障完成。
35.上述步骤s1中,辅助越障轨道7两端略高于地线11,中间部分平行于地线11,并且与地线11无机械联接,不会改变地线11原有的机械特性和电气特性,辅助越障轨道7包括a段、b段、c段、d段和e段,其中a段轨道自地线11向上延伸,即a段轨道的高度略高于地线11,使越障除冰机器人脱离地线11,b段轨道向远离直线塔方向延伸,b段轨道和a段轨道交接处存在一定的弯曲弧度;c段轨道平行于地线11;d段轨道向靠近地线11的方向延伸,d段轨道向靠近地线11方向水平延伸,或者d段轨道向靠近地线11的方向倾斜向下延伸,使d段轨道略微有下降坡度;e段轨道高度也略高于地线11,e段轨道向地线11方向倾斜向下延伸,使越障除冰机器人回到地线11。另外,为实现辅助越障轨道7和直线塔的固定,a段轨道和b段轨道交接处的底部、b段轨道和c段轨道交接处的底部、c段轨道和d段轨道交接处的底部、d段轨道和e段轨道交接处的底部均设有用于连接直线塔的连接杆701。
36.上述步骤s2中,a段轨道的高度略高于地线11,s2主要包括以下步骤:s21:第一行进轮301越过地线11与辅助越障轨道7交界处,进入到a段轨道内,此时第一电动推杆403控制成对的两个第一夹紧轮4011完全嵌入到第一行进轮301外部凹槽,保持越障除冰机器人平衡不脱轨,第一行进轮301通过第一驱动电机303提供动力;s22:第二行进轮302进入a段轨道内,第二电动推杆404控制成对的两个第二夹紧轮4021完全嵌入到第二行进轮302外部凹槽,保持越障除冰机器人平衡不脱轨,第二行进轮302通过第二驱动电机304提供动力。
37.在步骤s21中,第二行进轮302的包边结构完全包裹辅助越障轨道和地线11之间的间隙,不会产生脱轨或者脱线的问题。
38.在其中一个实施例中,当越障除冰机器人可以在辅助越障轨道上保持稳定时,上述步骤s3中,第一电动推杆403和第二电动推杆404依次控制第一夹紧轮4011和第二夹紧轮4021下降,使其下降便于越过障碍物(即连接杆701),步骤s3具体包括以下步骤:s31:第一行进轮301进入a段轨道与b段轨道的交接处,第一电动推杆403控制第一
夹紧轮组件401下降,第一行进轮301继续提供前进的动力并进入b段轨道;s32:第二行进轮302进入a段轨道与b段轨道的交接处,第二电动推杆404控制第二夹紧轮组件402下降,第二行进轮302继续提供前进的动力并进入b段轨道;s33:越障除冰机器人越过b段轨道,第一夹紧轮组件401和第二夹紧轮组件402保持下降状态,第一行进轮301和第二行进轮302直接越过b段轨道与c段轨道的交接处。
39.在该实施例中,上述步骤s4、s5、s6中,第一夹紧组件和第二夹紧组件始终保持在下降后的状态,即行进机构和夹紧固定机构始终处于分离的状态,在步骤s6中,此过程越障除冰机器人需要越过辅助越障轨道e段,再次进入地线11,此过程夹紧固定机构处于机架1下方,由所述第一行进轮301和第二行进轮302提供前进的动力,地线11和辅助越障轨道之间存在间隙,行进轮的包边可以碾过,不会发生脱线或者脱轨的情况。
40.在本技术另一个实施例中,当越障除冰机器人在辅助越障轨道上难以保持稳定时,上述步骤s3包括以下步骤:s3a:第一行进轮301进入a段轨道与b段轨道的交接处,第一电动推杆403控制第一夹紧轮组件401下降,第一行进轮301继续提供前进的动力并进入b段轨道;s3b:第二行进轮302进入a段轨道与b段轨道的交接处,第二电动推杆404控制第二夹紧轮组件402下降,同时,第一电动推杆403控制第一夹紧轮组件401上升,直至第一夹紧轮组件401嵌入到第一行进轮301中,夹紧辅助越障轨道保持越障除冰机器人在辅助越障轨道上的稳定,第一行进轮301、第二行进轮302继续提供前进的动力并进入b段轨道;s3c:第二越障机器人进入b段轨道后,第二电动推杆404控制第二夹紧轮组件402上升,直至第二夹紧轮组件402嵌入到第二行进轮302中,夹紧辅助越障轨道保持越障除冰机器人在辅助越障轨道上的稳定。
41.在此工况下,步骤s4中,越障除冰机器人需要越过越障轨道c段,此时第一夹紧轮4011嵌设在第一行进轮301中,第二夹紧轮4021嵌设在第二行进轮302中,即行进机构和夹紧固定机构始终夹紧辅助越障轨道以保持越障除冰机器人的稳定。
42.在步骤s5中,当越障除冰机器人越过c段和d段的交接处、d段和e段的交接处时,第一夹紧轮组件401和第二夹紧轮组件402的动作同步骤s3,即,在越过c段和d段的交接处时,第一行进轮301进入c段轨道与d段轨道的交接处,第一电动推杆403先控制第一夹紧轮组件401下降,第一行进轮301继续提供前进的动力并进入d段轨道,第二行进轮302进入c段轨道与d段轨道的交接处,第二电动推杆404控制第二夹紧轮组件402下降,同时,第一电动推杆403控制第一夹紧轮组件401上升,直至第一夹紧轮组件401嵌入到第一行进轮301中,夹紧辅助越障轨道保持越障除冰机器人在辅助越障轨道上的稳定,第一行进轮301、第二行进轮302继续提供前进的动力并进入d段轨道;第二越障机器人进入d段轨道后,第二电动推杆404控制第二夹紧轮组件402上升,直至第二夹紧轮组件402嵌入到第二行进轮302中。
43.在越过d段和e段的交接处时,第一行进轮301进入d段轨道与e段轨道的交接处,第一电动推杆403先控制第一夹紧轮组件401下降,第一行进轮301继续提供前进的动力并进入e段轨道,第二行进轮302进入d段轨道与e段轨道的交接处,第二电动推杆404控制第二夹紧轮组件402下降,同时,第一电动推杆403控制第一夹紧轮组件401上升,直至第一夹紧轮组件401嵌入到第一行进轮301中,夹紧辅助越障轨道保持越障除冰机器人在辅助越障轨道上的稳定,第一行进轮301、第二行进轮302继续提供前进的动力并进入e段轨道;第二越障
机器人进入e段轨道后,第二电动推杆404控制第二夹紧轮组件402上升,直至第二夹紧轮组件402嵌入到第二行进轮302中。
44.步骤s6中,此过程越障除冰机器人需要越过辅助越障轨道e段,再次进入地线11,由所述第一行进轮301和第二行进轮302提供前进的动力,地线11和辅助越障轨道之间存在间隙,行进轮的包边可以碾过,不会发生脱线或者脱轨的情况。
45.实施例4:实施例4的技术方案与实施例1的技术方案基本相同,其不同之处在于:防护侧板上设有加热板,由于覆冰从防护上板103上滑落,在摩擦力作用下不可避免会有覆冰残留在防护上板103上,或者部分覆冰会直接结冰固定在防护上板103上,加热板的设置使得覆冰与防护上板103之间接触面为水,减少了防护上板103和覆冰之间的摩擦力,在覆冰在重力作用下沿防护板的坡度下滑。进一步避免了覆冰在除冰机器人上堆积。
46.实施例5:如图7、图8所示,实施例5的技术方案与实施例1的技术方案基本相同,其不同之处在于:一种越障除冰机器人,还包括越障辅助夹紧机构,越障辅助夹紧机构包括辅助支架8、第三夹紧轮组件9和联动结构10,第三夹紧轮组件9滑动设置在辅助支架8上,。在越障过程中,当地线11或者辅助越障轨道上有覆冰时,先进入地线11或先进入辅助越障轨道一侧的行进轮下方的夹紧固定机构难以直接上升与行进轮配合以夹紧线缆,后进入地线11(或辅助越障轨道)的行进轮在冲击除冰机构2进行除冰之后,夹紧轮组件可与行进轮配合以夹紧线缆,保持越障除冰机器人的稳固。
47.在该实施例中,后进入地线11或辅助越障轨道的行进轮为第二行进轮302,则联动结构10用于连接第三夹紧轮组件9和第二夹紧轮组件402,联动结构10使得第三夹紧轮组件9和第二夹紧轮组件402通过联动结构10实现同步升降,当遇到障碍时,第二夹紧轮组件402先下降,在联动结构10作用下,第三夹紧轮组件9上升直至第三夹紧轮组件9与第二行进轮302上下交错夹紧,保持越障除冰机器人在地线11上的稳固。
48.如图9所示,联动结构10包括第一连杆1001、转动杆1004,第一连杆1001两端分别与第三夹紧轮组件9和第二夹紧轮组件402转动连接,转动杆1004一端连接在第一连杆1001上,另一端滑动设置在辅助支架8上。
49.第三夹紧轮组件9包括第三支架901和成对设置在第三支架901两侧的第三夹紧轮902,第三夹紧轮组件9滑动设置在辅助支架8上,在辅助支架8上设有滑槽801,第三支架901上对应设有第三滑块,第三滑块滑动设置在滑槽801内。另外,在本实施例中,滑槽801为t型滑槽801,第三滑块对应设置为t型结构,有效避免第三滑块从滑槽801中脱离,且在辅助支架8上滑槽801平行设置两个以保持第三夹紧轮组件9的稳定性。
50.另外,在第三支架901上延伸有第三连接板,第二夹紧轮组件402还包括第二支架向第三夹紧轮902方向延伸的第二连接板,第一连杆1001一端转动连接在第三连接板上,另一端转动连接在第二连接板上,转动连接方式可以为铰接也可以为球连接。
51.在第一连杆1001上设有用于安装转动杆1004的连接孔,辅助支架8上设有滑轨804,转动杆1004一端设置在连接孔内,实现第一连杆1001和转动杆1004的转动连接,转动杆1004另一端滑动设置在辅助支架8的滑轨804内。在滑轨804的上端设有用于卡接转动杆1004的弹性卡接片803,当第二夹紧固定机构移动至最上端时(即第二夹紧轮4021嵌设在第
二行进轮302内时),转动杆1004用过弹性卡接片803卡接在上端。弹性卡接片803设置为内部中空的弧形结构。
52.进一步地,为保持联动作业时,第二夹紧轮组件402和第三夹紧轮902之间的稳定性,联动结构10还包括分别平行设于第一连杆1001两侧的第二连杆1002和第三连杆1003,第二连杆1002两端分别转动连接于第二夹紧轮组件402和第三夹紧轮组件9上,第三连杆1003的两端也分别转动连接于第二夹紧轮组件402和第三夹紧轮组件9上。第二连杆1002、第三连杆1003与第二夹紧轮组件402、第三夹紧轮组件9的转动连接方式和第一连杆1001在第二夹紧轮组件402和第三夹紧轮组件9上的转动连接方式相同。
53.在本实施例中,当在越障过程中,辅助越障轨道上也有覆冰的工况下,越障除冰机器人的越障方法包括以下步骤:s001:越障除冰机器人进入辅助越障轨道,冲击除冰机构2根据监测机构检测到的地线11下方覆冰厚度调整倾斜角度,越障除冰机器人进入除冰工作状态;s002:第一行进轮301越过地线11与辅助越障轨道交界处,进入到辅助越障轨道的a段轨道内,调整冲击除冰机构2的角度,使除冰冲头201可以垂直冲击地线11下方的冰层;s003:第二行进轮302越过地线11与辅助越障轨道交界处,进入到辅助越障轨道的a段轨道内,第二夹紧轮组件402通过第二电动推杆404上升高度配合第二行进轮302的外部凹槽夹住辅助越障轨道,保持越障除冰机器人稳定,同时转动杆1004通过弹性卡接片803卡接在滑轨804的上端,第一驱动电机303和第二驱动电机304分别驱动第一行进轮301和第二行进轮302旋转,使第一行进轮301和第二行进轮302提供动力;s004:第一行进轮301直接越过a段轨道与b段轨道的交接处,监测机构检测到第二夹紧轮组件402遇障,第二电动推杆404控制第二夹紧轮组件402下降,在联动结构10作用下,第三夹紧轮组件9向上移动,直至第三夹紧轮902贴紧辅助越障轨道,第二行进轮302继续提供前进的动力并进入b段轨道,当监测机构检测到第二行进轮302越过障碍进入b段轨道时,第二电动推杆404控制第二夹紧轮组件402上升,在重力和联动结构10作用下,第三夹紧轮组件9下降直至越过障碍;s005:在b段轨道,冲击除冰机构2继续除冰,第二夹紧轮组件402保持与第二行进机构配合夹紧辅助越障轨道的状态,使得越障除冰机器人在辅助越障轨道上的稳定性;s006:在bc轨道、cd轨道、de轨道的交接处,越障除冰机器人的越障方法与步骤s004相同,且在各段轨道上均由第一行进轮301和第二行进轮302提供前进的动力直至越障除冰机器人回到地线11。
54.在步骤s004中,在夹紧固定机构上升后,由于转动杆1004卡接在滑轨804的上端,在转动杆1004和第一连杆1001的作用下,第三夹紧轮组件9向上移动,直至第三夹紧轮902贴紧辅助越障轨道;另外,由于在各段轨道交接处底下障碍物仅为连接杆701,因此第二夹紧机构无需下降较大的高度,因此在弹性卡接片803具备弹力的情况下,转动杆1004不会脱离弹性卡接片803。即,只有当第二夹紧机构下降到一定高度时,转动杆1004才会从滑槽801的上端脱离。
55.此外,第一连杆1001和第二连接板之间铰接,在第一连杆1001上设有铰接轴,第二连接板上设有铰接孔,在铰接孔的直径大于交接轴的直径,第一连杆1001和第三连接板之间铰接结构与第一连杆1001和第二连接板之间铰接结构相同,由于第一连杆1001转动后,
第二夹紧轮组件402和第三夹紧轮组件9的运行轨迹为弧形,在铰接孔的直径大于交接轴的直径使得铰接孔和铰接轴之间存在间隙,避免第二夹紧机构下降过程中联动结构10卡住无法移动造成不便。
56.在本发明另一个实施例中,设有行进轮一侧为机架1的上端,在辅助机架1的上端设有腔体,腔体成对设置在滑槽801的上端的两侧,在腔体内填充有弹性块802,使得滑槽801上端的侧壁由弹性块802构成。这就使第一连杆1001转动后,第三夹紧轮组件9具备其他方向的移动空间,避免联动结构10卡滞造成不便。
57.在本发明另一个实施例中,后进入地线11或辅助越障轨道的行进轮为第一行进轮301,则联动结构10用于连接第三夹紧轮组件9和第一夹紧轮组件401。
58.需要说明的是,上述描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
59.以上实施例仅用于说明本发明而不用于限制本发明的范围。对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1