一种基于低非线性度策略的配电网优化方法
1.本发明涉及一种配电网优化方法,特别涉及一种基于低非线性度策略的配电网优化方法。
背景技术:
2.目前,在新能源供给体系中,风、光等清洁能源所占的比重越来越大,由于风光等清洁能源出力有着大量的不确定性,因此将大大加剧电力系统的不确定程度,影响电力系统的安全稳定。在新能源消费侧,新能源电动汽车由于其低排放量而受到越来越多的欢迎,由于新能源汽车之类的负荷都是直流负荷,所以未来电力负荷中直流负荷所占的比重将会越来越高,传统的交流配电网将无法满足未来对安全经济的电力供应日益增加的需求。在确保交直流混合配电网安全运行的前提下,提高系统的经济性是当前亟待解决的问题。
3.网络重构与无功优化是配电网优化运行的重要手段。网络重构在满足配电网络辐射状运行特性的情况下,通过切换联络开关或分段开关的状态,从而优化潮流分布,然而由于潮流方程的非线性特性,最优潮流问题非凸,求解困难且求解时间较长,因此难以在电网实际中广泛应用。无功优化是通过调节发电机无功出力、无功补偿设备出力以及可调变压器的分接头,从而调整无功潮流的分布来维持系统电压水平,并降低网络损耗。然而对于无功出力的不确定性,传统的鲁棒优化将使得求解方案过于保守,因此也难以大规模应用。
技术实现要素:
4.本发明为解决公知技术中存在的技术问题而提供一种基于低非线性度策略的配电网优化方法。
5.本发明为解决公知技术中存在的技术问题所采取的技术方案是:一种基于低非线性度策略的配电网优化方法,建立配电网静态重构与无功协同两阶段分布鲁棒优化模型,根据网络的拓扑约束和功率平衡列写约束条件,将约束条件中的非凸约束进行优化并转换为线性约束;将得到的第一阶段决策变量的值代入约束条件中,通过迭代求解,得到优化后的第二阶段决策变量的取值。
6.进一步地,建立配电网静态重构与无功协同两阶段分布鲁棒优化模型包括如下方法步骤:
7.第一阶段以在期望场景下的开关操作及运行成本最小为目标对变量进行优化,第二阶段根据第一阶段确定的变量取值,以最恶劣场景下的弃可再生能源、切负荷量、微型燃气轮机发电以及网损成本综合最小为目标,对第一阶段的变量取值进行调整,以此建立目标函数。
8.进一步地,建立的目标函数为:
[0009][0010]
其中,为第一阶段目标
[0011]
函数;为第二阶段目标函数;
[0012]
第二阶段目标函数为分布鲁棒优化模型,表示最恶劣场景下的发电及网损成本均值;式中:
[0013]
为交流支路i-j的开断状态,是第一阶段决策变量;
[0014]
为直流支路i-j的开断状态,是第一阶段决策变量;
[0015]oij
为有载调压器的离散变比,是第一阶段决策变量;
[0016]ci
为节点i的电容器组的投入容量,是第一阶段决策变量;
[0017]
p
i,1
为第一阶段期望场景下节点i注入的有功功率,是第一阶段决策变量;
[0018]qi,1
为第一阶段期望场景下节点i注入的无功功率,是第一阶段决策变量;
[0019]
为第一阶段期望场景下节点i接入的有功负荷,是第一阶段决策变量;
[0020]
为第一阶段期望场景下节点i接入的无功负荷,是第一阶段决策变量;
[0021]
为第一阶段期望场景下交流网络节点i流向换流站节点j的有功功率,是第一阶段决策变量;
[0022]
为第一阶段期望场景下交流网络节点i流向换流站节点j的无功功率,是第一阶段决策变量;
[0023]mj,1
为第一阶段期望场景下换流站的调制比,是第一阶段决策变量;
[0024]
为交流网络开关的动作成本系数;
[0025]
ij为节点i和节点j间的支路;
[0026]
为交流开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0027]
为所有交流支路的集合;
[0028]
为直流网络开关的动作成本系数;
[0029]
为直流开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0030]
为所有直流支路的集合;
[0031]closs
为网损成本系数;
[0032]
p
ij,1
为第一阶段期望场景下节点i流向节点j的有功功率;
[0033]
p
ji,1
为第一阶段期望场景下节点j流向节点i的有功功率;
[0034]
ω
l
为所有支路的集合;
[0035]
ωn为所有节点的的集合;
[0036]cg
为微型燃气轮机发电成本系数;
[0037]
为所有接入微型燃气轮机节点的集合;
[0038]
为所有接入可再生能源发电节点的集合;
[0039]cd
为切负荷成本系数;
[0040]
为节点i有功负荷的预测值;
[0041]
为第二阶段最恶劣场景下交流网络节点i流向换流站节点j的有功功率,是第二阶段决策变量;
[0042]
为第二阶段最恶劣场景下交流网络节点i流向换流站节点j的无功功率,是第二阶段决策变量;
[0043]mj,2
为第二阶段最恶劣场景下换流站的调制比,是第二阶段决策变量;
[0044]
p
i,2
为第二阶段最恶劣场景下节点i注入的有功功率,是第二阶段决策变量;
[0045]qi,2
为第二阶段最恶劣场景下节点i注入的无功功率,是第二阶段决策变量;
[0046]
为第二阶段最恶劣场景下节点i实际接入的有功负荷,是第二阶段决策变量;
[0047]
为第二阶段最恶劣场景下节点i实际接入的无功负荷,是第二阶段决策变量;
[0048]ce
为弃可再生能源发电成本系数;
[0049]
为节点i有功负荷的具体实现值,为不确定变量;
[0050]
为最恶劣场景下的可再生能源发电出力,为不确定变量;
[0051]
p
ij,2
为第二阶段最恶劣场景下节点i流向节点j的有功功率;
[0052]
p
ji,2
为第二阶段最恶劣场景下节点j流向节点i的有功功率;
[0053]
为交流网络的开关动作成本;
[0054]
为直流网络的开关动作成本;
[0055]
为第一阶段期望场景下的网损成本;
[0056]
为第一阶段期望场景下微型燃气轮机发电成本;
[0057]
为第一阶段期望场景下的切负荷成本;
[0058]
为第二阶段最恶劣场景下的切负荷成本;
[0059]
为第二阶段最恶劣场景下的弃可再生能源发电成本;
[0060]
为第二阶段最恶劣场景下的微型燃气轮机发电成本;
[0061]
为第二阶段最恶劣场景下的网损成本;
[0062]
p为不确定变量的分布;
[0063]
f为不确定变量的模糊集;
[0064]ep
为分布p下的期望;
[0065]
sup表示最恶劣情况下成本最大。
[0066]
进一步地,将第二阶段目标函数转化为如下形式:
[0067][0068]
式中:
[0069]
x为第一阶段决策变量的矩阵形式;
[0070]
为不确定变量的矩阵形式;
[0071]
y为第二阶段决策变量的矩阵形式;
[0072]
a为第一阶段决策变量的系数矩阵;
[0073]
b为第二阶段决策变量的系数矩阵;
[0074]
c为不确定变量的系数矩阵;
[0075]
b为构成第二阶段目标函数的系数矩阵;
[0076]
f为不确定变量的模糊集;
[0077]
其中模糊集f表示为如下形式:
[0078][0079]
式中:
[0080]
为不确定变量的不确定集合;
[0081]
表示不确定变量的不确定概率之和为1;
[0082]
μ为不确定变量的均值;
[0083]
σ2为不确定变量的方差;
[0084]
由于第一阶段目标函数不包含不确定变量,因此先根据数学优化方法求出第一阶段目标函数的最小值,得到第一阶段目标函数取得最小值的第一阶段决策变量的取值;
[0085]
将得到的第一阶段决策变量的值代入第二阶段目标函数及约束条件中,通过数学优化方法迭代求解,求出第二阶段目标函数的最大均值,得到优化后的第二阶段决策变量的取值。
[0086]
进一步地,数学优化方法采用cplex商用求解器优化处理。
[0087]
进一步地,根据网络的拓扑约束和功率平衡列写的约束条件包括:
[0088]
辐射状网络拓扑约束:
[0089][0090]
式中:
[0091]
λ
ij
为支路i-j的开断状态;
[0092]
β
ij
为节点间关系的标识,其值为1时表示节点i是节点j的父节点,其值为0时则表示节点i不是节点j的父节点;
[0093]
β
ji
为节点间关系的标识,其值为0时表示节点i是节点j的父节点,其值为1时则表示节点i不是节点j的父节点;
[0094]
ij为节点i和节点j间的支路;
[0095]
△
λ
ij
为开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0096]
为支路i-j的初始开断状态;
[0097]
n(j)为节点j的邻节点的集合;
[0098]
ω
l
为所有支路的集合;
[0099]
为辐射状网络的根节点的集合;
[0100]
ωn为所有节点的集合;
[0101]
辐射状网络拓扑约束的含义为配电系统中除根节点外的所有节点有且仅有一个父节点;
[0102]
换流站功率平衡约束:
[0103][0104]
式中:
[0105]
m为该变量属于第m阶段;
[0106]
ij为节点i和节点j间的支路;
[0107]
为第m阶段交流网络节点i流向换流站节点j的有功功率;
[0108]
为第m阶段换流站节点j流向交流网络节点i的有功功率;
[0109]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0110]
为第m阶段换流站节点j流向交流网络节点i的无功功率;
[0111]
为换流站流向直流侧的有功功率;
[0112]
为换流站内节点i的电压;
[0113]
为换流站内节点j的电压;
[0114]gij
为支路i-j间的电导;
[0115]bij
为支路i-j间的电纳;
[0116]
θ
ij,m
为第m阶段支路i-j两端节点的相角差;
[0117]
为换流站支路集合;
[0118]
交流网络潮流方程约束:
[0119][0120]
式中:
[0121]
m为该变量属于第m阶段;
[0122]
ij为节点i和节点j间的支路;
[0123]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0124]
p
ji,m
为第m阶段节点j流向节点i的有功功率;
[0125]qij,m
为第m阶段节点i流向节点j的无功功率;
[0126]qji,m
为第m阶段节点j流向节点i的无功功率;
[0127]
λ
ij
为支路i-j的开断状态;
[0128]gij
为支路i-j间的电导;
[0129]bij
为支路i-j间的电纳;
[0130]vi,m
为第m阶段节点i的电压;
[0131]vj,m
为第m阶段节点j的电压;
[0132]
θ
ij,m
为第m阶段支路i-j两端节点的相角差;
[0133]
为交流支路的集合。
[0134]
进一步地,根据网络的拓扑约束和功率平衡列写的约束条件还包括:
[0135]
换流站容量约束:
[0136][0137]
式中:
[0138]
m为该变量属于第m阶段;
[0139]
ij为节点i和节点j间的支路;
[0140]
为第m阶段交流网络节点i流向换流站节点j的有功功率;
[0141]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0142]
为换流站的最大容量;
[0143]
为换流站支路集合;
[0144]
换流站无功调节能力约束:
[0145][0146]
式中:
[0147]
m为该变量属于第m阶段;
[0148]
ij为节点i和节点j间的支路;
[0149]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0150]
为换流站的最大无功调节能力;
[0151]
为换流站支路集合;
[0152]
换流站电压上下限约束:
[0153][0154]
式中:
[0155]
m为该变量属于第m阶段;
[0156]
为换流站内节点j的电压;
[0157]
μd为直流电压利用率,一般取
[0158]mj,m
为第m阶段换流站的调制比;
[0159]mj,max
为换流站的调制比的上限;
[0160]mj,min
为换流站的调制比的下限;
[0161]
为换流站直流侧电压;
[0162]
为换流站直流侧电压的上限;
[0163]
为换流站直流侧电压的下限;
[0164]
为换流站内交流节点的集合;
[0165]
为换流站内直流节点的集合。
[0166]
进一步地,根据网络的拓扑约束和功率平衡列写的约束条件还包括:
[0167]
直流网络功率平衡约束:
[0168][0169]
式中:
[0170]
m为该变量属于第m阶段;
[0171]
ij为节点i和节点j间的支路;
[0172]
p
i,m
为第m阶段节点i注入的有功功率;
[0173]
为第m阶段节点i接入的有功负荷;
[0174]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0175]
n(i)为节点i的邻节点集合;
[0176]
为所有直流节点的集合;
[0177]
为所有直流支路的集合;
[0178]
节点电压上下限约束:
[0179]vi,min
≤v
i,m
≤v
i,max
,i∈ωn,m∈{1,2}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(h);
[0180]
式中:
[0181]
m为该变量属于第m阶段;
[0182]vi,max
为节点i电压的上限;
[0183]vi,m
为第m阶段节点i的电压;
[0184]vi,min
为节点i电压的下限;
[0185]
ωn为所有节点的集合;
[0186]
支路传输容量约束:
[0187][0188]
式中:
[0189]
m为该变量属于第m阶段;
[0190]
ij为节点i和节点j间的支路;
[0191]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0192]qij,m
为第m阶段节点i流向节点j的无功功率;
[0193]sij,max
为支路i-j能够传输的最大容量。
[0194]
进一步地,根据网络的拓扑约束和功率平衡列写的约束条件还包括:
[0195]
电容器组投切上下限约束:
[0196][0197]
式中:
[0198]
为投入电容器组的数量;
[0199]
为电容器组的最大数量;
[0200]ci
为节点i的电容器组的投入容量;
[0201]ci,step
为节点i的单组电容器的投入容量;
[0202]
为含有电容器组的节点集合;
[0203]
微型燃气轮机出力上下限约束:
[0204][0205]
式中:
[0206]
m为该变量属于第m阶段;
[0207]
p
i,m
为第m阶段节点i注入的有功功率;
[0208]qi,m
为第m阶段节点i注入的无功功率;
[0209]
p
g,max
为微型燃气轮机的出力上限;
[0210]
为微型燃气轮机的最大功率因数角;
[0211]
表示有微型燃气轮机出力的节点集合;
[0212]
有载调压器调整变比上下限约束:
[0213][0214]
式中:
[0215]
为有载调压器的档位;
[0216]
为有载调压器档位最大值;
[0217]oij
为有载调压器的离散变比;
[0218]oij,min
为有载调压器的最小变比;
[0219]oij,step
为有载调压器的每档位调节变比;
[0220]
为安装有载调压器支路的集合。
[0221]
进一步地,将约束条件中的非凸约束进行优化并转换为线性约束的方法包括如下方法步骤:
[0222]
设配电网节点i的电压为vi,设配电网节点j的初始电压为v
i,0
,设配电网节点j的电压为vj,设配电网节点j的初始电压为v
j,0
,设支路i-j两端节点相角差为θ
ij
,设支路i-j两端初始相角差为θ
ij,0
,设初始条件v
i,0
=v
j,0
=1.0pu,θ
ij,0
=0;
[0223]
将配电网i、j的电压的平方v
i2
、v
j2
以及支路i-j两端节点相角差θ
ij
作为独立变量对交流网络潮流方程约束进行泰勒展开;
[0224]
首先对正弦和余弦函数进行泰勒展开,得到:
[0225][0226]
将式(1)代入如下功率平衡约束方程:
[0227]
p
ij
=g
ijvi2-v
ivj
(g
ij
cosθ
ij
+b
ij
sinθ
ij
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);
[0228]qij
=-b
ijvi2
+v
ivj
(b
ij
cosθ
ij-g
ij
sinθ
ij
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3);
[0229]
得到:
[0230][0231][0232]
式中:
[0233]
p
ij
为节点i流向节点j的有功功率;
[0234]qij
为节点i流向节点j的无功功率;
[0235]
将配电网两节点i、j的电压的乘积v
ivj
和支路i-j两端节点相角差θ
ij
进行解耦,在初始条件附近进行泰勒展开:
[0236]vivj
θ
ij
≈v
i,0vj,0
θ
ij
+(v
ivj-v
i,0vj,0
)θ
ij,0
≈θ
ij
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6);
[0237][0238]
对方程中的v
ivj
进行如下形式的数学变换:
[0239][0240]
将式(6)、式(7)和式(8)代入式(4)和式(5)得到:
[0241][0242][0243]
上式中由于表示网损,且其值很小,因此可以忽略,所以上式就变为:
[0244][0245][0246]
将线性化后的潮流方程代入式(b)和式(c),则换流站功率平衡约束线性化为:
[0247][0248]
交流网络潮流方程约束线性化为:
[0249][0250]
本发明具有的优点和积极效果是:本发明所提供的配电网优化方法既根据潮流方程的非线性特性,又根据新能源出力的不确定性,通过采用低非线性度策略,并结合分布鲁棒优化理论,构建了一种新的优化模型和算法,并且该算法降低了潮流方程的非线性,改善了求解方案的保守性,使得可用性大大提升。
[0251]
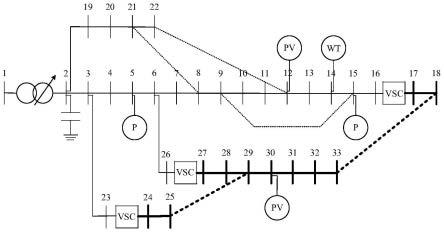
本发明采用经过人为改造的ieee33节点进行验证,节点12和节点30接入光伏发电,节点14接入风力发电,节点5和节点15接入微型燃气轮机,节点2接入电容器组,在节点1和节点2之间接入有载调压器,在节点16和节点17、节点23和节点24、节点26和节点27之间的支路上安装vsc,如图1所示,细线表示交流网络,粗线表示直流网络,虚线表示初始断开
支路。本发明模型与未进行线性优化的模型和仅考虑最恶劣场景鲁棒优化模型进行对比。
[0252]
针对图1所示的网络,分别采用本发明模型和未线性化的模型进行计算,本发明模型用时35.6s,而未线性化模型用时71.9s,由此可见本发明模型通过将v2视为独立变量而降低潮流约束方程的非线性程度,将优化求解时间大幅缩短。
[0253]
如图2所示,在模拟场景下,本发明模型在小部分场景下的最大综合运行成本比仅考虑最恶劣场景鲁棒优化模型的最大综合运行成本大,但本发明模型的平均综合运行成本都要比仅考虑最恶劣场景鲁棒优化模型的综合运行成本小,由于本发明模型有效克服了仅考虑最恶劣场景鲁棒优化模型过于保守的特点,因此本发明模型有明显的成本优势。
附图说明
[0254]
图1是ieee33节点改造的交直流混合配电系统图;
[0255]
图2是模拟场景下本发明模型与仅考虑最恶劣场景鲁棒优化模型结果对比图;
[0256]
图中:1~33表示节点序号;节点1和节点2之间装置为有载调压器;p表示微型燃气轮机;pv表示光伏发电设备;wt表示风力发电设备;vsc表示换流站。
具体实施方式
[0257]
为能进一步了解本发明的发明内容、特点及功效,兹列举以下实施例,并配合附图详细说明如下:
[0258]
请参见图1至图2,一种基于低非线性度策略的配电网优化方法,建立配电网静态重构与无功协同两阶段分布鲁棒优化模型,根据网络的拓扑约束和功率平衡列写约束条件,将约束条件中的非凸约束进行优化并转换为线性约束;将得到的第一阶段决策变量的值代入约束条件中,通过迭代求解,得到优化后的第二阶段决策变量的取值。
[0259]
优选地,建立配电网静态重构与无功协同两阶段分布鲁棒优化模型可包括如下方法步骤:
[0260]
第一阶段可以在期望场景下的开关操作及运行成本最小为目标对变量进行优化,第二阶段可根据第一阶段确定的变量取值,可以最恶劣场景下的弃可再生能源、切负荷量、微型燃气轮机发电以及网损成本综合最小为目标,对第一阶段的变量取值进行调整,以此建立目标函数。
[0261]
优选地,建立的目标函数可为:
[0262]
[0263]
其中,为第一阶段目标函数;为第二阶段目标函数;
[0264]
第二阶段目标函数为分布鲁棒优化模型,表示最恶劣场景下的发电及网损成本均值;式中:
[0265]
为交流支路i-j的开断状态,是第一阶段决策变量;支路i-j表示从节点i到节点j的支路;
[0266]
为直流支路i-j的开断状态,是第一阶段决策变量;
[0267]oij
为有载调压器的离散变比,是第一阶段决策变量;
[0268]ci
为节点i的电容器组的投入容量,是第一阶段决策变量;
[0269]
p
i,1
为第一阶段期望场景下节点i注入的有功功率,是第一阶段决策变量;
[0270]qi,1
为第一阶段期望场景下节点i注入的无功功率,是第一阶段决策变量;
[0271]
为第一阶段期望场景下节点i接入的有功负荷,是第一阶段决策变量;
[0272]
为第一阶段期望场景下节点i接入的无功负荷,是第一阶段决策变量;
[0273]
为第一阶段期望场景下交流网络节点i流向换流站节点j的有功功率,是第一阶段决策变量;
[0274]
为第一阶段期望场景下交流网络节点i流向换流站节点j的无功功率,是第一阶段决策变量;
[0275]mj,1
为第一阶段期望场景下换流站的调制比,是第一阶段决策变量;
[0276]
为交流网络开关的动作成本系数;
[0277]
ij为节点i和节点j间的支路;
[0278]
为交流开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0279]
为所有交流支路的集合;
[0280]
为直流网络开关的动作成本系数;
[0281]
为直流开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0282]
为所有直流支路的集合;
[0283]closs
为网损成本系数;
[0284]
p
ij,1
为第一阶段期望场景下节点i流向节点j的有功功率;
[0285]
p
ji,1
为第一阶段期望场景下节点j流向节点i的有功功率;
[0286]
ω
l
为所有支路的集合;
[0287]
ωn为所有节点的的集合;
[0288]cg
为微型燃气轮机发电成本系数;
[0289]
为所有接入微型燃气轮机节点的集合;
[0290]
为所有接入可再生能源发电节点的集合;
[0291]cd
为切负荷成本系数;
[0292]
为节点i有功负荷的预测值;
[0293]
为第二阶段最恶劣场景下交流网络节点i流向换流站节点j的有功功率,是第二阶段决策变量;
[0294]
为第二阶段最恶劣场景下交流网络节点i流向换流站节点j的无功功率,是第二阶段决策变量;
[0295]mj,2
为第二阶段最恶劣场景下换流站的调制比,是第二阶段决策变量;
[0296]
p
i,2
为第二阶段最恶劣场景下节点i注入的有功功率,是第二阶段决策变量;
[0297]qi,2
为第二阶段最恶劣场景下节点i注入的无功功率,是第二阶段决策变量;
[0298]
为第二阶段最恶劣场景下节点i实际接入的有功负荷,是第二阶段决策变量;
[0299]
为第二阶段最恶劣场景下节点i实际接入的无功负荷,是第二阶段决策变量;ce为弃可再生能源发电成本系数;
[0300]
为节点i有功负荷的具体实现值,为不确定变量;
[0301]
为最恶劣场景下的可再生能源发电出力,为不确定变量;
[0302]
p
ij,2
为第二阶段最恶劣场景下节点i流向节点j的有功功率;
[0303]
p
ji,2
为第二阶段最恶劣场景下节点j流向节点i的有功功率;
[0304]
为交流网络的开关动作成本;
[0305]
为直流网络的开关动作成本;
[0306]
为第一阶段期望场景下的网损成本;
[0307]
为第一阶段期望场景下微型燃气轮机发电成本;
[0308]
为第一阶段期望场景下的切负荷成本;
[0309]
为第二阶段最恶劣场景下的切负荷成本;
[0310]
为第二阶段最恶劣场景下的弃可再生能源发电成本;
[0311]
为第二阶段最恶劣场景下的微型燃气轮机发电成本;
[0312]
为第二阶段最恶劣场景下的网损成本;
[0313]
p为不确定变量的分布;
[0314]
f为不确定变量的模糊集;
[0315]ep
为分布p下的期望;
[0316]
sup表示最恶劣情况下成本最大。
[0317]
优选地,可将第二阶段目标函数转化为如下形式:
[0318][0319]
式中:
[0320]
x为第一阶段决策变量的矩阵形式;
[0321]
为不确定变量的矩阵形式;
[0322]
y为第二阶段决策变量的矩阵形式;
[0323]
a为第一阶段决策变量的系数矩阵;
[0324]
b为第二阶段决策变量的系数矩阵;
[0325]
c为不确定变量的系数矩阵;
[0326]
b为构成第二阶段目标函数的系数矩阵;
[0327]
f为不确定变量的模糊集;
[0328]
其中模糊集f可表示为如下形式:
[0329][0330]
式中:
[0331]
为不确定变量的不确定集合;
[0332]
表示不确定变量的不确定概率之和为1;
[0333]
为不确定变量的期望函数;
[0334]
μ为不确定变量的均值;
[0335]
σ2为不确定变量的方差;
[0336]
由于第一阶段目标函数不包含不确定变量,因此可先根据数学优化方法求出第一阶段目标函数的最小值,得到第一阶段目标函数取得最小值的第一阶段决策变量的取值;
[0337]
可将得到的第一阶段决策变量的值代入第二阶段目标函数及约束条件中,通过数学优化方法迭代求解,可求出第二阶段目标函数的最大均值,得到优化后的第二阶段决策变量的取值。
[0338]
优选地,数学优化方法可采用cplex商用求解器优化处理。
[0339]
优选地,根据网络的拓扑约束和功率平衡列写的约束条件可包括:
[0340]
辐射状网络拓扑约束:
[0341][0342]
式中:
[0343]
λ
ij
为支路i-j的开断状态;
[0344]
β
ij
为节点间关系的标识,其值为1时表示节点i是节点j的父节点,其值为0时则表示节点i不是节点j的父节点;
[0345]
β
ji
为节点间关系的标识,其值为0时表示节点i是节点j的父节点,其值为1时则表示节点i不是节点j的父节点;
[0346]
ij为节点i和节点j间的支路;
[0347]
△
λ
ij
为开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0348]
为支路i-j的初始开断状态;
[0349]
n(j)为节点j的邻节点的集合;
[0350]
ω
l
为所有支路的集合;
[0351]
为辐射状网络的根节点的集合;
[0352]
ωn为所有节点的集合;
[0353]
辐射状网络拓扑约束的含义为配电系统中除根节点外的所有节点有且仅有一个父节点;
[0354]
换流站功率平衡约束:
[0355][0356]
式中:
[0357]
m为该变量属于第m阶段;
[0358]
ij为节点i和节点j间的支路;
[0359]
为第m阶段交流网络节点i流向换流站节点j的有功功率;
[0360]
为第m阶段换流站节点j流向交流网络节点i的有功功率;
[0361]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0362]
为第m阶段换流站节点j流向交流网络节点i的无功功率;
[0363]
为换流站流向直流侧的有功功率;
[0364]
为换流站内节点i的电压;
[0365]
为换流站内节点j的电压;
[0366]gij
为支路i-j间的电导;
[0367]bij
为支路i-j间的电纳;
[0368]
θ
ij,m
为第m阶段支路i-j两端节点的相角差;
[0369]
为换流站支路集合;
[0370]
交流网络潮流方程约束:
[0371][0372]
式中:
[0373]
m为该变量属于第m阶段;
[0374]
ij为节点i和节点j间的支路;
[0375]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0376]
p
ji,m
为第m阶段节点j流向节点i的有功功率;
[0377]qij,m
为第m阶段节点i流向节点j的无功功率;
[0378]qji,m
为第m阶段节点j流向节点i的无功功率;
[0379]
λ
ij
为支路i-j的开断状态;
[0380]gij
为支路i-j间的电导;
[0381]bij
为支路i-j间的电纳;
[0382]vi,m
为第m阶段节点i的电压;
[0383]vj,m
为第m阶段节点j的电压;
[0384]
θ
ij,m
为第m阶段支路i-j两端节点的相角差;
[0385]
为交流支路的集合。
[0386]
优选地,根据网络的拓扑约束和功率平衡列写的约束条件还可包括:
[0387]
换流站容量约束:
[0388][0389]
式中:
[0390]
m为该变量属于第m阶段;
[0391]
ij为节点i和节点j间的支路;
[0392]
为第m阶段交流网络节点i流向换流站节点j的有功功率;
[0393]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0394]
为换流站的最大容量;
[0395]
为换流站支路集合;
[0396]
换流站无功调节能力约束:
[0397][0398]
式中:
[0399]
m为该变量属于第m阶段;
[0400]
ij为节点i和节点j间的支路;
[0401]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0402]
为换流站的最大无功调节能力;
[0403]
为换流站支路集合;
[0404]
换流站电压上下限约束:
[0405][0406]
式中:
[0407]
m为该变量属于第m阶段;
[0408]
为换流站内节点j的电压;
[0409]
μd为直流电压利用率,一般取
[0410]mj,m
为第m阶段换流站的调制比;
[0411]mj,max
为换流站的调制比的上限;
[0412]mj,min
为换流站的调制比的下限;
[0413]
为换流站直流侧电压;
[0414]
为换流站直流侧电压的上限;
[0415]
为换流站直流侧电压的下限;
[0416]
为换流站内交流节点的集合;
[0417]
为换流站内直流节点的集合。
[0418]
优选地,根据网络的拓扑约束和功率平衡列写的约束条件还可包括:
[0419]
直流网络功率平衡约束:
[0420][0421]
式中:
[0422]
m为该变量属于第m阶段;
[0423]
ij为节点i和节点j间的支路;
[0424]
p
i,m
为第m阶段节点i注入的有功功率;
[0425]
为第m阶段节点i接入的有功负荷;
[0426]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0427]
n(i)为节点i的邻节点集合;
[0428]
为所有直流节点的集合;
[0429]
为所有直流支路的集合;
[0430]
节点电压上下限约束:
[0431]vi,min
≤v
i,m
≤v
i,max
,i∈ωn,m∈{1,2}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(h);
[0432]
式中:
[0433]
m为该变量属于第m阶段;
[0434]vi,max
为节点i电压的上限;
[0435]vi,m
为第m阶段节点i的电压;
[0436]vi,min
为节点i电压的下限;
[0437]
ωn为所有节点的集合;
[0438]
支路传输容量约束:
[0439][0440]
式中:
[0441]
m为该变量属于第m阶段;
[0442]
ij为节点i和节点j间的支路;
[0443]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0444]qij,m
为第m阶段节点i流向节点j的无功功率;
[0445]sij,max
为支路i-j能够传输的最大容量。
[0446]
优选地,根据网络的拓扑约束和功率平衡列写的约束条件还可包括:
[0447]
电容器组投切上下限约束:
[0448][0449]
式中:
[0450]
为投入电容器组的数量;
[0451]
为电容器组的最大数量;
[0452]ci
为节点i的电容器组的投入容量;
[0453]ci,step
为节点i的单组电容器的投入容量;
[0454]
为含有电容器组的节点集合;
[0455]
微型燃气轮机出力上下限约束:
[0456][0457]
式中:
[0458]
m为该变量属于第m阶段;
[0459]
p
i,m
为第m阶段节点i注入的有功功率;
[0460]qi,m
为第m阶段节点i注入的无功功率;
[0461]
p
g,max
为微型燃气轮机的出力上限;
[0462]
为微型燃气轮机的最大功率因数角;
[0463]
表示有微型燃气轮机出力的节点集合;
[0464]
有载调压器调整变比上下限约束:
[0465][0466]
式中:
[0467]
为有载调压器的档位;
[0468]
为有载调压器档位最大值;
[0469]oij
为有载调压器的离散变比;
[0470]oij,min
为有载调压器的最小变比;
[0471]oij,step
为有载调压器的每档位调节变比;
[0472]
为安装有载调压器支路的集合。
[0473]
优选地,将约束条件中的非凸约束进行优化并转换为线性约束的方法可包括如下方法步骤:
[0474]
可设配电网节点i的电压为vi,设配电网节点j的初始电压为v
i,0
,设配电网节点j的电压为vj,设配电网节点j的初始电压为v
j,0
,设支路i-j两端节点相角差为θ
ij
,设支路i-j两端初始相角差为θ
ij,0
,设初始条件v
i,0
=v
j,0
=1.0pu,θ
ij,0
=0;
[0475]
可将配电网i、j的电压的平方v
i2
、v
j2
以及支路i-j两端节点相角差θ
ij
作为独立变量对交流网络潮流方程约束进行泰勒展开;
[0476]
可首先对正弦和余弦函数进行泰勒展开,得到:
[0477][0478]
可将式(1)代入如下功率平衡约束方程:
[0479]
p
ij
=g
ijvi2-v
ivj
(g
ij
cosθ
ij
+b
ij
sinθ
ij
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);
[0480]qij
=-b
ijvi2
+v
ivj
(b
ij
cosθ
ij-g
ij
sinθ
ij
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3);
[0481]
得到:
[0482][0483][0484]
式中:
[0485]
p
ij
为节点i流向节点j的有功功率;
[0486]qij
为节点i流向节点j的无功功率;
[0487]
可将配电网两节点i、j的电压的乘积v
ivj
和支路i-j两端节点相角差θ
ij
进行解耦,在初始条件附近进行泰勒展开:
[0488]vivj
θ
ij
≈v
i,0vj,0
θ
ij
+(v
ivj-v
i,0vj,0
)θ
ij,0
≈θ
ij
ꢀꢀꢀꢀꢀꢀꢀꢀ
(6);
[0489][0490]
可对方程中的v
ivj
进行如下形式的数学变换:
[0491][0492]
可将式(6)、式(7)和式(8)代入式(4)和式(5),可得到:
[0493][0494][0495]
上式中由于表示网损,且其值很小,因此可以忽略,所以上式就可变为:
[0496][0497][0498]
可将线性化后的潮流方程代入式(b)和式(c),则换流站功率平衡约束可线性化为:
[0499][0500]
交流网络潮流方程约束可线性化为:
[0501][0502]
下面以本发明的一个优选实施例来进一步说明本发明的工作流程及工作原理:
[0503]
一种基于低非线性度策略的配电网优化方法,包括有如下方法步骤:
[0504]
1)建立配电网静态重构与无功协同两阶段分布鲁棒优化模型,具体步骤如下:
[0505]
(1)第一阶段以在期望场景下的开关操作及运行成本最小为目标对变量进行优化,第二阶段根据第一阶段确定的变量取值,以最恶劣场景下的弃可再生能源、切负荷量、微型燃气轮机发电以及网损成本综合最小为目标,对第一阶段的变量取值进行调整,以此建立的目标函数为:
[0506][0507]
式中:
[0508]
为交流支路i-j的开断状态,是第一阶段决策变量;
[0509]
为直流支路i-j的开断状态,是第一阶段决策变量;
[0510]oij
为有载调压器的离散变比,是第一阶段决策变量;
[0511]ci
为节点i的电容器组的投入容量,是第一阶段决策变量;
[0512]
p
i,1
为第一阶段期望场景下节点i注入的有功功率,是第一阶段决策变量;
[0513]qi,1
为第一阶段期望场景下节点i注入的无功功率,是第一阶段决策变量;
[0514]
为第一阶段期望场景下节点i接入的有功负荷,是第一阶段决策变量;
[0515]
为第一阶段期望场景下节点i接入的无功负荷,是第一阶段决策变量;
[0516]
为第一阶段期望场景下交流网络节点i流向换流站节点j的有功功率,是第一阶段决策变量;
[0517]
为第一阶段期望场景下交流网络节点i流向换流站节点j的无功功率,是第一阶段决策变量;
[0518]mj,1
为第一阶段期望场景下换流站的调制比,是第一阶段决策变量;
[0519]
为交流网络开关的动作成本系数;
[0520]
ij为节点i和节点j间的支路;
[0521]
为交流开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0522]
为所有交流支路的集合;
[0523]
为直流网络开关的动作成本系数;
[0524]
为直流开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0525]
为所有直流支路的集合;
[0526]closs
为网损成本系数;
[0527]
p
ij,1
为第一阶段期望场景下节点i流向节点j的有功功率;
[0528]
p
ji,1
为第一阶段期望场景下节点j流向节点i的有功功率;
[0529]
ω
l
为所有支路的集合;
[0530]
ωn为所有节点的的集合;
[0531]cg
为微型燃气轮机发电成本系数;
[0532]
为所有接入微型燃气轮机节点的集合;
[0533]
为所有接入可再生能源发电节点的集合;
[0534]cd
为切负荷成本系数;
[0535]
为节点i有功负荷的预测值;
[0536]
为第二阶段最恶劣场景下交流网络节点i流向换流站节点j的有功功率,是第二阶段决策变量;
[0537]
为第二阶段最恶劣场景下交流网络节点i流向换流站节点j的无功功率,是第二阶段决策变量;
[0538]mj,2
为第二阶段最恶劣场景下换流站的调制比,是第二阶段决策变量;
[0539]
p
i,2
为第二阶段最恶劣场景下节点i注入的有功功率,是第二阶段决策变量;
[0540]qi,2
为第二阶段最恶劣场景下节点i注入的无功功率,是第二阶段决策变量;
[0541]
为第二阶段最恶劣场景下节点i实际接入的有功负荷,是第二阶段决策变量;
[0542]
为第二阶段最恶劣场景下节点i实际接入的无功负荷,是第二阶段决策变量;
[0543]ce
为弃可再生能源发电成本系数;
[0544]
为节点i有功负荷的具体实现值,为不确定变量;
[0545]
为最恶劣场景下的可再生能源发电出力,为不确定变量;
[0546]
p
ij,2
为第二阶段最恶劣场景下节点i流向节点j的有功功率;
[0547]
p
ji,2
为第二阶段最恶劣场景下节点j流向节点i的有功功率;
[0548]
为交流网络的开关动作成本;
[0549]
为直流网络的开关动作成本;
[0550]
为第一阶段期望场景下的网损成本;
[0551]
为第一阶段期望场景下微型燃气轮机发电成本;
[0552]
为第一阶段期望场景下的切负荷成本;
[0553]
为第二阶段最恶劣场景下的切负荷成本;
[0554]
为第二阶段最恶劣场景下的弃可再生能源发电成本;
[0555]
为第二阶段最恶劣场景下的微型燃气轮机发电成本;
[0556]
为第二阶段最恶劣场景下的网损成本;
[0557]
p为不确定变量的分布;
[0558]
f为不确定变量的模糊集;
[0559]ep
为分布p下的期望;
[0560]
sup表示最恶劣情况下成本最大。
[0561]
(2)根据网络的拓扑约束和功率平衡列写如下约束条件:
[0562]
a.辐射状网络拓扑约束:
[0563][0564]
式中:
[0565]
λ
ij
为支路i-j的开断状态;
[0566]
β
ij
为节点间关系的标识,其值为1时表示节点i是节点j的父节点,其值为0时则表示节点i不是节点j的父节点;
[0567]
β
ji
为节点间关系的标识,其值为0时表示节点i是节点j的父节点,其值为1时则表示节点i不是节点j的父节点;
[0568]
ij为节点i和节点j间的支路;
[0569]
△
λ
ij
为开关动作状态的0-1标识,其值为1时,表示支路i-j的开关动作,反之表示不动作;
[0570]
为支路i-j的初始开断状态;
[0571]
n(j)为节点j的邻节点的集合;
[0572]
ω
l
为所有支路的集合;
[0573]
为辐射状网络的根节点的集合;
[0574]
ωn为所有节点的集合;
[0575]
辐射状网络拓扑约束的含义为配电系统中除根节点外的所有节点有且仅有一个父节点。
[0576]
b.换流站功率平衡约束:
[0577][0578]
式中:
[0579]
m为该变量属于第m阶段;
[0580]
ij为节点i和节点j间的支路;
[0581]
为第m阶段交流网络节点i流向换流站节点j的有功功率;
[0582]
为第m阶段换流站节点j流向交流网络节点i的有功功率;
[0583]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0584]
为第m阶段换流站节点j流向交流网络节点i的无功功率;
[0585]
为换流站流向直流侧的有功功率;
[0586]
为换流站内节点i的电压;
[0587]
为换流站内节点j的电压;
[0588]gij
为支路i-j间的电导;
[0589]bij
为支路i-j间的电纳;
[0590]
θ
ij,m
为第m阶段支路i-j两端节点的相角差;
[0591]
为换流站支路集合。
[0592]
c.交流网络潮流方程约束:
[0593][0594]
式中:
[0595]
m为该变量属于第m阶段;
[0596]
ij为节点i和节点j间的支路;
[0597]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0598]
p
ji,m
为第m阶段节点j流向节点i的有功功率;
[0599]qij,m
为第m阶段节点i流向节点j的无功功率;
[0600]qji,m
为第m阶段节点j流向节点i的无功功率;
[0601]
λ
ij
为支路i-j的开断状态;
[0602]gij
为支路i-j间的电导;
[0603]bij
为支路i-j间的电纳;
[0604]vi,m
为第m阶段节点i的电压;
[0605]vj,m
为第m阶段节点j的电压;
[0606]
θ
ij,m
为第m阶段支路i-j两端节点的相角差;
[0607]
为交流支路的集合。
[0608]
进一步地,根据网络的拓扑约束和功率平衡列写的约束条件还包括:
[0609]
d.换流站容量约束:
[0610][0611]
式中:
[0612]
m为该变量属于第m阶段;
[0613]
ij为节点i和节点j间的支路;
[0614]
为第m阶段交流网络节点i流向换流站节点j的有功功率;
[0615]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0616]
为换流站的最大容量;
[0617]
为换流站支路集合。
[0618]
e.换流站无功调节能力约束:
[0619][0620]
式中:
[0621]
m为该变量属于第m阶段;
[0622]
ij为节点i和节点j间的支路;
[0623]
为第m阶段交流网络节点i流向换流站节点j的无功功率;
[0624]
为换流站的最大无功调节能力;
[0625]
为换流站支路集合。
[0626]
f.换流站电压上下限约束:
[0627][0628]
式中:
[0629]
m为该变量属于第m阶段;
[0630]
为换流站内节点j的电压;
[0631]
μd为直流电压利用率,一般取
[0632]mj,m
为第m阶段换流站的调制比;
[0633]mj,max
为换流站的调制比的上限;
[0634]mj,min
为换流站的调制比的下限;
[0635]
为换流站直流侧电压;
[0636]
为换流站直流侧电压的上限;
[0637]
为换流站直流侧电压的下限;
[0638]
为换流站内交流节点的集合;
[0639]
为换流站内直流节点的集合。
[0640]
g.直流网络功率平衡约束:
[0641][0642]
式中:
[0643]
m为该变量属于第m阶段;
[0644]
ij为节点i和节点j间的支路;
[0645]
p
i,m
为第m阶段节点i注入的有功功率;
[0646]
为第m阶段节点i接入的有功负荷;
[0647]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0648]
n(i)为节点i的邻节点集合;
[0649]
为所有直流节点的集合;
[0650]
为所有直流支路的集合。
[0651]
h.节点电压上下限约束:
[0652]vi,min
≤v
i,m
≤v
i,max
,i∈ωn,m∈{1,2}
ꢀꢀꢀꢀꢀꢀ
(h);
[0653]
式中:
[0654]
m为该变量属于第m阶段;
[0655]vi,max
为节点i电压的上限;
[0656]vi,m
为第m阶段节点i的电压;
[0657]vi,min
为节点i电压的下限;
[0658]
ωn为所有节点的集合。
[0659]
i.支路传输容量约束:
[0660][0661]
式中:
[0662]
m为该变量属于第m阶段;
[0663]
ij为节点i和节点j间的支路;
[0664]
p
ij,m
为第m阶段节点i流向节点j的有功功率;
[0665]qij,m
为第m阶段节点i流向节点j的无功功率;
[0666]sij,max
为支路i-j能够传输的最大容量。
[0667]
j.电容器组投切上下限约束:
[0668][0669]
式中:
[0670]
为投入电容器组的数量;
[0671]
为电容器组的最大数量;
[0672]ci
为节点i的电容器组的投入容量;
[0673]ci,step
为节点i的单组电容器的投入容量;
[0674]
为含有电容器组的节点集合。
[0675]
k.微型燃气轮机出力上下限约束:
[0676][0677]
式中:
[0678]
m为该变量属于第m阶段;
[0679]
p
i,m
为第m阶段节点i注入的有功功率;
[0680]qi,m
为第m阶段节点i注入的无功功率;
[0681]
p
g,max
为微型燃气轮机的出力上限;
[0682]
为微型燃气轮机的最大功率因数角;
[0683]
表示有微型燃气轮机出力的节点集合。
[0684]
m.有载调压器调整变比上下限约束:
[0685][0686]
式中:
[0687]
为有载调压器的档位;
[0688]
为有载调压器档位最大值;
[0689]oij
为有载调压器的离散变比;
[0690]oij,min
为有载调压器的最小变比;
[0691]oij,step
为有载调压器的每档位调节变比;
[0692]
为安装有载调压器支路的集合。
[0693]
(3)换流站功率平衡约束和交流网络潮流方程约束中存在电压的二次项,约束方
程严重非凸,为此需要将换流站功率平衡约束和交流网络潮流方程约束进行线性处理,以此来加快求解速度。
[0694]
由于配电网具备节点电压幅值接近于1pu,线路两端相角差非常小的特点,将节点电压的平方视为独立变量,对非凸的换流站功率平衡约束和交流网络潮流方程约束进行线性化处理,即换流站功率平衡约束和交流网络潮流方程约束可以看成关于节点电压的平方的一次函数,降低了方程的非线性程度。
[0695]
设配电网节点i的电压为vi,设配电网节点j的初始电压为v
i,0
,设配电网节点j的电压为vj,设配电网节点j的初始电压为v
j,0
,设支路i-j两端节点相角差为θ
ij
,设支路i-j两端初始相角差为θ
ij,0
,设初始条件v
i,0
=v
j,0
=1.0pu,θ
ij,0
=0;
[0696]
将配电网i、j的电压的平方v
i2
、v
j2
以及支路i-j两端节点相角差θ
ij
作为独立变量对交流网络潮流方程约束进行泰勒展开;
[0697]
首先对正弦和余弦函数进行泰勒展开,得到:
[0698][0699]
将式(1)代入如下功率平衡约束方程:
[0700]
p
ij
=g
ijvi2-v
ivj
(g
ij
cosθ
ij
+b
ij
sinθ
ij
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);
[0701]qij
=-b
ijvi2
+v
ivj
(b
ij
cosθ
ij-g
ij
sinθ
ij
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3);
[0702]
得到:
[0703][0704][0705]
式中:
[0706]
p
ij
为节点i流向节点j的有功功率;
[0707]qij
为节点i流向节点j的无功功率;
[0708]
将配电网两节点i、j的电压的乘积v
ivj
和支路i-j两端节点相角差θ
ij
进行解耦,在初始条件附近进行泰勒展开:
[0709]vivj
θ
ij
≈v
i,0vj,0
θ
ij
+(v
ivj-v
i,0vj,0
)θ
ij,0
≈θ
ij
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6);
[0710][0711]
对方程中的v
ivj
进行如下形式的数学变换:
[0712][0713]
将式(6)、式(7)和式(8)代入式(4)和式(5)得到:
[0714][0715]
[0716]
上式中由于表示网损,且其值很小,因此可以忽略,所以上式就变为:
[0717][0718][0719]
将线性化后的潮流方程代入式(b)和式(c),则换流站功率平衡约束线性化为:
[0720][0721]
交流网络潮流方程约束线性化为:
[0722][0723]
(4)目标函数的第二项即为分布鲁棒模型,表示最恶劣场景下的发电及网损成本均值:
[0724][0725]
由于可再生能源出力与负荷具体值无法准确获得其具体分布,但可以通过历史信息等数据确定可再生能源出力与负荷具体值的均值和方差等信息,所以可以采用模糊集的方式来处理这些不确定变量,为此将上式转化为如下形式:
[0726][0727]
式中:
[0728]
x为第一阶段决策变量的矩阵形式;
[0729]
为不确定变量的矩阵形式;
[0730]
y为第二阶段决策变量的矩阵形式;
[0731]
a为第一阶段决策变量的系数矩阵;
[0732]
b为第二阶段决策变量的系数矩阵;
[0733]
c为不确定变量的系数矩阵;
[0734]
b为构成第二阶段目标函数的系数矩阵;
[0735]
f为不确定变量的模糊集。
[0736]
其中模糊集f可表示为如下形式:
[0737][0738]
式中:
[0739]
为不确定变量的不确定集合;
[0740]
表示不确定变量的不确定概率之和为1;
[0741]
μ为不确定变量的均值;
[0742]
σ2为不确定变量的方差。
[0743]
以上所述的实施例仅用于说明本发明的技术思想及特点,其目的在于使本领域内的技术人员能够理解本发明的内容并据以实施,不能仅以本实施例来限定本发明的专利范围,即凡本发明所揭示的精神所作的同等变化或修饰,仍落在本发明的专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1