直线电机系统的初始电角度定位方法及系统与流程
1.本发明涉及电机控制领域,具体地涉及一种直线电机系统的初始电角度定位方法及系统。
背景技术:
2.直线电机伺服控制系统,使直线电机的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。一般直线电机搭载增量式光栅尺作为位置反馈,驱动器驱动线圈产生电流及推力,推动动子运动。目前被广泛应用于高精密定位平台的运动控制系统中,包括半导体、加工制造等自动化领域。
3.实际直线电机运行时需要确定初始上电的电角度,驱动器才能按照正确的运行方式驱动电机运动,但增量式光栅尺初始上电时无法确定初始位置角,因此实际运行之前需要进行角度辨识,根据光栅尺数值解算到动子的初始电角度位置。增量式位置传感基本初始定位方法包括:预定位法、霍尔辨识、高频注入法等算法。
4.霍尔辨识:需要在直线电机动子上正确地安装三个霍尔传感器abc,包括相序和角度,若且常见的霍尔有60度安装法和120度安装法。该方法几乎无需动子运动。但是,安装错误、相序不一致、或角度误差较大则会导致辨识失败。且增加了霍尔传感器,成本更高,至少需要电源、地线、abc三相线,总共五根线缆更为复杂。
5.预定位法:在电机启动前,让转子磁极与给定相位对齐,可以通过控制电流矢量在固定相位保持一段时间或者直接控制器驱动器逆变器二极管的开闭,使转子转到给定的磁场方向。然而,在预定位过程中,动子可能会有较大范围的运动,至少为一个n-s极的距离,不适用于不允许电机较大运动的使用范围。
6.高频注入法:通过给线圈电流注入高频分量,经过滤波器及解算算法提取电角度信息,虽然该方案定位时运动距离较小,但注入高频分量可能会引起电机振动,且解算过程复杂,算法精度一般,在很多场景并不实用。
7.此外,由于直线电机的永磁体设计中磁通量并非完全正弦分布,实际电机初始电角度定位时,存在的齿槽力、摩擦力等因素使得定位到的电角度与光栅尺换算的电角度并非完全匹配,导致电角度理论结果与实际存在一定误差。如果直接采用光栅尺换算的电角度运算,那么存在的角度误差会影响实际的闭环控制性能。
8.因此,现有技术缺少能够在整个定位过程电流较小,运动位移较小的应用场景中,准确定位初始电角度的方法。
技术实现要素:
9.本发明的目的是为了克服现有技术存在的问题,提供一种直线电机系统的初始电角度定位方法及系统。
10.为了实现上述目的,本发明第一方面提供一种直线电机系统的初始电角度定位方法,包括以下步骤:
通过预定位法测试得到电角度θ及其对应的光栅尺位置p换算的电角度θ'数据对;根据所述数据对拟合得到畸变函数θ'=f(θ);采用二分法查找电角度,直至电机锁定当前电角度θ(i),记录当前光栅尺位置p换算的电角度θ'=θ(i),i为二分法查找的迭代次数;根据畸变函数的反函数求解得到初始电角度为f-1
(θ')。
11.本发明第二方面提供一种直线电机系统的初始电角度定位系统,所述系统包括:数据获取模块,用于通过预定位法测试得到电角度θ及其对应的光栅尺位置p换算的电角度θ'数据对;拟合畸变函数模块,用于根据所述数据对拟合得到畸变函数θ'=f(θ);二分法查找模块,用于采用二分法查找电角度,直至电机锁定当前电角度θ(i),记录当前光栅尺位置p换算的电角度θ'=θ(i),i为二分法查找的迭代次数;初始电角度定位模块,用于根据畸变函数的反函数求解得到初始电角度为f-1
(θ')。
12.通过上述技术方案,首先引入畸变函数,设计了算法用拟合定位电角度与光栅尺位置换算的电角度之间的畸变函数f(x)。同时设计了基于增量式光栅尺脉冲计数的二分法电角度查找算法,能够保证电机电流较小的情况下,利用一个较小的电流产生推力矩,但是不足以推动动子距离运动。光栅尺出现脉冲可判断力矩方向后,即可通过二分法查找到初始电角度,然后按照前面拟合到的畸变函数f(x),把光栅尺的电角度换算到实际的电角度。整个定位过程电流较小,运动位移较小,无需额外的传感器,且实现判断逻辑简单,该算法可嵌入伺服驱动器,且可广泛应用于直线电机控制系统中。
附图说明
13.下面结合附图,对本发明的具体实施方式进行详细描述。
14.图1是本发明直线电机的闭环控制系统示意图;图2是传统预定法原理示意图;图3是本发明示通过预定位法进行畸变函数关系拟合测试用系统示意图;图4是本发明注入开环电压增加过程示意图;图5是本发明畸变函数拟合测试流程图;图6是本发明畸变函数示意图;图7是本发明直线电机系统的初始电角度定位方法流程图。
具体实施方式
15.为了进一步说明本发明的特征,下面通过具体的实施方式对本发明的技术方案进行更加详细的说明。但是本发明能够以很多不同于此描述地在其他地方展开实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
16.永磁同步直线电机(pmlsm)的闭环控制系统如图1所示,包含电流环,速度环,和位置环。位置和速度计算通过光栅尺脉冲计数计算获得,作为位置环和速度环的反馈至进行控制器运算,速度环的计算值输入电流环进行控制运算,其中直线电机的foc(磁场定向控
制,是永磁同步(直线)电机的核心控制算法)控制框架包含clarke变换(克拉克变换,三相静止转两相静止坐标系变换),park变换(派克变换,两相静止转两相旋转坐标系变换),将三相电流采样值转换并反馈到d、q轴电流环,park逆变换和svpwm(空间矢量脉宽调制,三相桥式电路(逆变器)的驱动方式)产生pwm(脉宽调制)波,通过三相逆变器驱动电机产生电流及对应的推力,进而完成直线电机的运动控制。
17.电角度是通过位置反馈换算得到的,一般的,在直线电机控制系统中,一般采用增量式光栅尺作为位置反馈,而直线电机可以看做是旋转电机的直线展开,n-s磁极对应180
°
电角度,在直线电机中对应距离称为极距τ,因此一般的,光栅尺增量式位移dp反映的角度差为dθ=[dp%(2τ)]*180/τ。
[0018]
而由于直线电机的永磁体设计中磁通量并非完全正弦分布,实际电机初始电角度定位时,存在的齿槽力、摩擦力等因素使得定位到的电角度与光栅尺换算的电角度并非完全匹配,除了在n-s极对应位置较为精准外,存在着一个畸变的函数拟合关系。如果直接采用光栅尺换算的电角度运算,那么存在的角度误差会影响实际的闭环控制性能。
[0019]
根据直线电机原理,定义一个旋转的dq坐标系,q轴电流产生推力,d轴电流产生锁定的定位力,线圈绕组的坐标系定义为αβ静止坐标系,α与a相绕组方向重合,电角度θ的定义为磁链与α轴的夹角,电流关系有或者传统预定法可通过设置q轴分量电流为iq=0,施加d轴电流分量id=is,(通常is设置等于电机额定电流)的电流闭环控制或直接施加相电压的电流开环控制实现,如图2所示。在控制系统中施加指令励磁电流is,将电角度设置为预定位置电角度θ
0 ,而开环的dq电流可通过给定dq轴电压矢量的方式得到,驱动器逆变电路输出的三相电压在电机线圈绕组内形成固定方向的电流矢量,产生的力矩驱使电机转子从图中的位置旋转到电流矢量位置。则初始上电时以预定位到的角度当做初始相角,记录当前的光栅尺位置后,即可求解实际角度θ。
[0020]
基于上述原理,本发明第一方面提供一种直线电机系统的初始电角度定位方法,包括以下步骤:通过预定位法测试得到电角度θ及其对应的光栅尺位置p换算的电角度θ'数据对;首先通过预定位法进行畸变函数关系拟合测试,按照如图3所示的系统框架,给电机以角度θ0注入开环的d、q轴电压矢量,通过park逆变换转换到αβ轴电压值,通过svpwm生成pwm波,使得三相逆变器给直线电机三相绕组供电,产生电流及力矩,最终让转子磁极与
给定相位θ0对齐,对应实际的光栅尺位置p,完成电机角度锁定过程。具体的,静态时,电流变化率和反电动势为0,因此其中给定uq=0,ud=is*r,设定定位电角度θ0,经过svpwm,给电机注入电压矢量后,电机锁定至电角度θ0所对应的位置p。其中is可设置为电机额定电流,r为电机相电阻。
[0021]
进一步地,注入开环电压选择周期性的电压增加过程,在一个周期内,给定电角度后在该周期的前半段内给d轴的电压冲0上升到ud,在该周期的后半段内给d轴的电压下降到0,并重新给定下一周期新的电角度。如图4所示,给定电角度θ1,在t0-t1时间段,给d轴的电压冲0上升到ud,在t1-t2时间段d轴电压下降到0,重新给新的角度θ2,重复该步骤即可。
[0022]
进一步地,通过预定位法测试得到电角度θ及其对应的光栅尺位置p换算的电角度θ'数据对,如图5所示,包括以下步骤(仅在第一次搭建直线电机控制系统时需要进行畸变函数拟合,后续初始电角度查找直接使用该函数即可):s1、设定uq=0,ud=is*r,θ(0)=0,i=0,按照前述注入开环电压的过程和电压增加方式给电机注入开环电压矢量(ud,θ(0)),其中,ud为d轴电压,uq为q轴电压、ud=is*r,is为电机额定电流,r为电机相电阻,θ(0)为初始电角度;s2、电机在电压矢量作用下运动到θ(0)电角度对应光栅尺位置p0;此时位置对应于n极,电角度最为准确;s3、电压值不变,令i=i+1,i迭代计算次数,给定电角度进行累加操作,给电机注入开环电压矢量(ud,θ(i)),其中θ(i)=θ(i-1)+dθ,dθ为预设的电角度累加值,优选dθ=5;s4、此时电机在电压矢量作用下运动到θ(i)电角度对应光栅尺位置p(i),得到p(i)换算θ'(i)的关系式为:θ'(i)=[(p(i)-p0)%2τ]*180/τ,记录得到所述数据对,其中τ为所述直线电机的极距;s5、判断θ(i)是否小于或等于180
°
;若是,跳转至步骤s3,若否,数据获取测试过程结束。
[0023]
s6、得到电角度θ及其对应的光栅尺换算的电角度θ'数据对(θ(i),θ'(i))。
[0024]
根据所述数据对拟合得到畸变函数θ'=f(θ);通过最小二乘法拟合得到的畸变函数关系为:θ'=f(θ)=θ+a*sin(b*θ),(该畸变函数示例仅包含最基本的线性和周期函数,不同的电机畸变函数略有不同),其中,a、b为常数,a、b的大小取决于直线电机系统,完成搭建后不会发生变化。本实施例中示例性拟合得到畸变函数关系为θ'=f(θ)=θ+11.5*sin(6*θ),拟合曲线如图6所示,可以看出畸变引起的定位电角度与光栅尺位置换算的电角度最大差值达到了11.5度,且呈现明显的周期性,这必然影响查找电角度的精度,最终影响控制精度。因此如果实际预定位角度为θ',则需根据畸变函数的反函数θ=f-1
(θ')求解对应的实际电角度θ。
[0025]
采用二分法查找电角度,直至电机锁定当前电角度θ(i),记录当前光栅尺换算的电角度θ'=θ(i),i为二分法查找的迭代次数;畸变函数测定和拟合过程仅需在第一次构建直线电机运动控制系统时需要用到,这种方法得到的畸变函数在后续的电角度定位中离线解算即可,因此适用于所有电角度定位方法。但在实际使用时,由于直线电机大部分不进行电机过大运行,如预定位方式,这种方式引起电机从某个位置θ运动到θ0,最多运行角度超过180度,对应于直线电机的极距τ。这种不可控的运动距离过大,可能导致结构干涉、撞击等情况。
[0026]
实际上对于某一位置电角度θ',当给一个较小的d轴电流i
s0
,该电流小于使电机运动的电流,对应电压大小为ud=i
s0
*r,可根据摩擦力ff除以电机推力常数kf计算i
s0
=ff/kf,预设电角度为θ0,当θ'》θ0,则转矩推力使得动子逆时针方向微动,定义逆时针为光栅尺运动正方向,顺时针为光栅尺运动负方向;当θ'《θ0,则转矩推力方向为顺时针方向,对应于光栅尺运动负方向;当θ'=θ0,则表明此时的d轴转矩与当前电角度基本重合,无需运动,即可判断电角度。根据以上分析,设计一种基于二分法的初始点角度查找方法。值得注意的是,由于电机负载、摩擦力等因素,转矩推力存在一个盲区θ
min
不足以使得动子微动,那么电角度的判断范围为θ
0-θ
min
≤θ'≤θ0+θ
min
。
[0027]
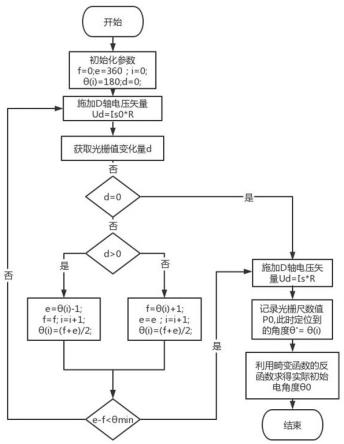
因此,所述采用二分法查找电角度,直至电机锁定当前电角度θ(i),具体包括以下步骤,如图7所示:(1)设置电角度区间[f,e],初始化f=0,e=360,迭代次数i=0,电角度θ(i)=180,光栅尺位置计数变化量为0;(2)给电机注入开环电压矢量ud= i
s0
*r,其中,i
s0
不足以让电机移动,但光栅尺能够产生脉冲变动;(3)分别记录注入前的光栅尺位置(如图4中p(t0))和注入后电压峰值时间处光栅尺位置(如图4中p(t1)),计算获取光栅尺变化量δd(δd=p(t1)-p(t0));(4)根据δd判断:若δd=0,说明初始定位角度与当前角度重合,或者定位角度小于阈值,转到步骤(8);若δd》0,说明正向运行,转到步骤(5);若δd《0,转到步骤(6);(5)设置新的查找区间f不变,e=θ(i)-1,迭代次数:i=i+1;电角度更新:θ(i)=(f+e)/2;转到步骤(7);(6)设置新的查找区间e不变 ,f=θ(i)+1,迭代次数:i=i+1;电角度更新:θ(i)=(f+e)/2; 转到步骤(7);(7)判断查找区间长度e-f是否小于设定阈值θ
min
,如果e-f《θ
min
,则跳转步骤(8),否则跳转至步骤(2);(8)按照当前计算的电角度θ(i)施加电压矢量ud=is*r,让电机锁定到当前电角度 θ(i)。
[0028]
当前锁定得到的电角度θ(i)为实际畸变下的电角度θ',因此根据畸变函数的反函数求解得到初始电角度为f-1
(θ')。
[0029]
进一步优选地,根据初始电角度获取所述直线电机闭环控制时的光栅尺位置p与电角度θ换算关系,公式为θ=[(p-p0)%2τ]*180/τ+f-1
(θ')。
[0030]
基于上述直线电机系统的初始电角度定位方法,本发明第二方面提供一种直线电机系统的初始电角度定位系统,所述系统包括:数据获取模块,用于通过预定位法测试得到电角度θ及其对应的光栅尺换算的电角度θ'数据对;拟合畸变函数模块,用于根据所述数据对拟合得到畸变函数θ'=f(θ);二分法查找模块,用于采用二分法查找电角度,直至电机锁定当前电角度θ(i),记录当前光栅尺换算的电角度θ'=θ(i),i为二分法查找的迭代次数;初始电角度定位模块,用于根据畸变函数的反函数求解得到初始电角度为f-1
(θ')。
[0031]
进一步地,所述数据获取模块,用于通过预定位法测试得到电角度θ及其对应的光栅尺换算的电角度θ'数据对,具体为:s1、设定uq=0,ud=is*r,θ(0)=0,给电机注入开环电压矢量(ud,θ(0)),其中,ud为d轴电压,uq为q轴电压、ud=is*r,is为电机额定电流,r为电机相电阻,θ(0)为初始电角度;s2、电机在电压矢量作用下运动到θ(0)电角度对应光栅尺计数的位置p0;s3、电压值不变,给定电角度进行累加操作,给电机注入开环电压矢量(ud,θ(i)),累加操作直至θ(i)》0结束,其中θ(i)=θ(i-1)+dθ,dθ为预设的电角度累加值;s4、电机在电压矢量作用下运动到θ(i)电角度对应光栅尺计数的位置p(i),得到p(i)换算θ'的关系式为:θ'=[(p(i)-p0)%2τ]*180/τ,记录得到所述数据对,其中τ为所述直线电机的极距。
[0032]
进一步地,所述二分法查找模块,用于采用二分法查找电角度,直至电机锁定当前电角度θ(i),具体为:(1)设置电角度区间[f,e],初始化f=0,e=360,i=0,电角度θ(i)=180,光栅尺计数变化量为0;(2)给电机注入开环电压矢量ud= i
s0
*r,其中,i
s0
不足以让电机移动,但光栅尺能够产生脉冲变动;(3)分别记录注入前的光栅尺位置和注入后电压峰值时间处位置,计算获取光栅尺变化量δd;(4)根据δd判断:若δd=0,转到步骤(8);若δd》0,转到步骤(5);若δd《0,转到步骤(6);(5)设置新的查找区间f不变,e=θ(i)-1,迭代次数:i=i+1;电角度更新:θ(i)=(f+e)/2;转到步骤(7);(6)设置新的查找区间e不变 ,f=θ(i)+1,迭代次数:i=i+1;电角度更新:θ(i)=(f+e)/2;转到步骤(7);(7)判断查找区间长度e-f是否小于设定阈值θ
min
,如果e-f《θ
min
,则跳转步骤(8),否则跳转至步骤(2);(8)按照当前计算的电角度θ(i)施加电压矢量ud=is*r,让电机锁定到当前电角度 θ(i)。
[0033]
实施例1:假设存在一个电机角度θ'=60
°
,定位盲区θ
min
=2,采用本发明的直线电机系统的初始电角度定位方法如下:设计基于初始电角度区间为[f,e]=[0-360]数值的二分法查找策略,首先设置ud与电角度为180
°
,并给电机通入电压矢量,由于θ0《180
°
,产生的力矩会引起电机往正方向微动,可根据光栅尺脉冲数增加,判断θ0位于[0,180]之间;设置ud与电角度为(0+180)/2=90
°
,并给电机通入电压矢量,由于θ0《90
°
,产生的力矩会引起电机往正方向微动,可根据光栅尺脉冲数增加,判断θ0位于[0,90]之间;设置ud与电角度为(0+45)/2=45
°
,并给电机通入电压矢量,由于θ0》45
°
,产生的力矩会引起电机往负方向微动,可根据光栅尺脉冲数减小,判断θ0位于[45,90]之间;设置ud与电角度为(90+45)/2=67.5
°
,并给电机通入电压矢量,由于θ0《67.5
°
,产生的力矩会引起电机往正方向微动,可根据光栅尺脉冲数增加,判断θ0位于[45,67.5]之
间;设置ud与电角度为(67.5+45)/2=56.25
°
,并给电机通入电压矢量,由于θ0》56.25
°
,产生的力矩会引起电机往负方向微动,可根据光栅尺脉冲数减小,判断θ0位于[45,56.25]之间;设置ud与电角度为(67.5+56.25)/2=61.85
°
,并给电机通入电压矢量,由于此时电角度误差仅为1.85
°
,产生的力矩有时可能不足以带动电机微动(或者当二分法查找区间大小小于定位盲区或者电角度所需精度时,如(e-f)《θ
min
),此时可以设置一个较大的电流is,电角度61.85
°
,则将电机锁定至初始电角度θ'=61.85
°
,记录当前光栅尺位置p0,然后根据第一部分的畸变函数反函数θ=f-1
(θ'),基于畸变函数θ'=f(θ)=θ+11.5*sin(6*θ),得到最终的初始电角度为θ0=f-1
(θ'),后续进行直线电机闭环控制时,光栅尺计数到电机电角度的换算关系为θ=[(p-p0)%2τ]*180/τ+θ0。
[0034]
最终电机运动1.85/180*τ,运动范围几乎是传统预定位法的百分之一,具体取决于盲区的大小。结合电角度畸变拟合函数的能够准确的获得初始电角度的计算。
[0035]
综上所述,通过本发明技术方案,首先引入畸变函数,设计了算法用以定位电角度与光栅尺换算的电角度之间的畸变函数f(x)拟合。同时设计了基于增量式光栅尺脉冲计数的二分法电角度查找算法,能够保证电机电流较小的情况下,利用一个较小的电流产生推力矩,但是不足以推动动子距离运动。光栅尺出现脉冲可判断力矩方向后,即可通过二分法查找到初始电角度,然后按照前面拟合到的畸变函数f(x),把光栅尺位置对应的电角度换算到实际的电角度。整个定位过程电流较小,运动位移较小,无需额外的传感器,且实现判断逻辑简单,该算法可嵌入伺服驱动器,且可广泛应用于直线电机控制系统中。
[0036]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,对于本邻域的普通技术人员而言,本发明的二分法可以替换为顺序查找、二分查找、差值查找以及斐波那契查找法。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1