一种基于MPC算法的电机调速控温方法
一种基于mpc算法的电机调速控温方法
技术领域
1.本发明涉及电机控制技术领域,特别涉及一种基于mpc算法的电机调速控温方法。
背景技术:
2.在工业领域中,电机是设备动力的来源。电机在将动力转化为机械能的同时也会将一部分能量转化为热能,而这一部分热能在超过一定能量值范围时会削弱电机性能,甚至当超过承载极限时会烧毁电机,严重影响设备整体性能的发挥,给生产带来影响。因此,需要对电机的温度进行管控。现有专利文献cn114337098a公开了一种电机强化散热结构,通过在冷却介质流经的表面上设置特殊的强化散热几何结构,该结构可在其尾流区域形成纵向涡流现象,打破或降低速度边界与温度边界层,并对流体速度形成扰乱,提高冷却介质的换热能力。该方法有一定辅助散热效果,但不起决定作用,且不适用于高负载工况的电机散热系统,并且上述方法是通过物理结构上的改变来实现电机的散热。而随着计算机技术的高速发展,计算机技术也逐渐的应用到了控制领域,因此在不改变电机物理结构的基础上,如何结合计算机技术和机器学习的算法实现对电机调速控温成为需要解决的技术问题。
技术实现要素:
3.本发明的目的在于,提供一种基于mpc算法的电机调速控温方法。本发明对电机进行调速控温,使其能够减少发热量,保障了电机的正常工作,提高了电机的使用寿命。
4.本发明的技术方案:一种基于mpc算法的电机调速控温方法,包括如下步骤:
5.步骤1、采集电机的实时数据作为样本空间,建立与电机实时温度有关的神经网络模型作为环境模型;
6.步骤2、环境模型以当前温度为基础预测未来温度趋势,采用mpc算法将未来温度趋势与真实环境进行交互,得到交互轨迹;
7.步骤3、根据交互轨迹对电机作出调速控温动作。
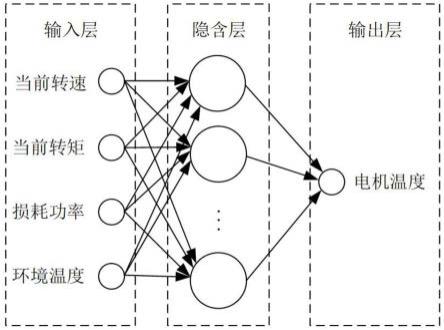
8.上述的基于mpc算法的电机调速控温方法,所述神经网络的输入量包括电机转矩tn、电机转速v、电机损耗功率p
t
和环境温度t0,所述神经网络的输出量为电机温度t;所述神经网络包括输入层、隐含层和输出层;所述输入层的节点数为4,隐含层节点数为7,输出层节点数为1。
9.前述的基于mpc算法的电机调速控温方法,采用控制变量法,当电机经过长时间运行温度达到稳定时,用计算机采集电机空载运行时不同转速下的电机转矩tn、电机转速v、电机温度t和环境温度t0。
10.前述的基于mpc算法的电机调速控温方法,基于能量守恒原理,当电机经过长时间运行温度达到稳定时,测量电机空载运行时不同转速下空气流速、流量和进出电机的温差计算出电机的总损耗p
t
,公式为:
11.p
t
=cmδt
12.其中,c为空气比热容,m为单位时间内流过电机的空气质量,δt为进风口和出风口处风温的变化量。
13.前述的基于mpc算法的电机调速控温方法,所述交互轨迹的获取包括如下步骤:
14.步骤2.1、以当前电机温度为状态s,电机的转速为动作a,构建基于当前状态和动作产生的状态转移函数和奖励值根据环境模型预测的未来温度趋势中收集模拟数据
15.步骤2.2、从当前状态s0出发,对未来温度趋势中每个动作a,附上一个长度为t的动作序列,得到[a0,a1,a2,...,a
t
];
[0016]
步骤2.3、利用交叉熵方法获取最优动作序列,并且每次选取最优序列中的第一个动作ak来与环境模型交互,
[0017]
步骤2.4、通过此动作序列与环境模型交互出一条轨迹
[0018]
前述的基于mpc算法的电机调速控温方法,所述交叉熵方法获取最优动作序列的过程是先设定循环次数e,从动作序列分布p(n)选取n条动作序列a1,
···
,an,对于每条动作序列a1,
···
,an,用环境模块评估累计奖励,然后根据评估结果保留m条最优动作序列a
i1
,
···
,a
in
,用m条最优动作序列a
i1
,
···
,a
in
更新动作序列分布p(n),重复循环e次后,计算所有最优动作序列的第一个动作的均值,该均值作为当前时刻采取的动作。
[0019]
前述的基于mpc算法的电机调速控温方法,所述调速控温动作包括如下步骤:
[0020]
步骤3.1、基于交互轨迹,对(s0,a0)计算得到一个以γ为衰减因子的累计奖励值,即
[0021]
步骤3.2、对每个动作a均执行步骤3.1的计算过程,选择一个最高累计价值的动作执行,即
[0022]
步骤3.3、建立约束关系:
[0023][0024]
在实际工作过程中,奖励值与温度变化成正相关,且温度不高于预设温度上限,转速不低于预设转速下限。
[0025]
与现有技术相比,本发明通过采集电机的实时数据作为样本空间,然后建立与电机实时温度有关的神经网络模型作为环境模型,再采用mpc算法根据环境模型以当前温度为基础预测未来温度趋势并与真实环境进行交互,最后作出调速控温动作。本发明可以在电机的温度即将达到阈值上限时,可自动修改电机参数,使其在不停机的状态下减少发热量,并维持在一个合理的温度区间内。
附图说明
[0026]
图1是本发明的神经网络的原理示意图;
[0027]
图2是交叉熵方法获取最优动作序列的过程示意图;
[0028]
图3是mpc算法的原理示意图。
具体实施方式
[0029]
下面结合实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
[0030]
实施例:一种基于mpc算法的电机调速控温方法,包括如下步骤:
[0031]
步骤1、采集电机的实时数据作为样本空间,建立与电机实时温度有关的神经网络模型作为环境模型;
[0032]
所述神经网络的输入量包括电机转矩tn、电机转速v、电机损耗功率p
t
和环境温度t0,所述神经网络的输出量为电机温度t;如图所示,所述神经网络包括输入层、隐含层和输出层;所述输入层的节点数为4,隐含层节点数为7,输出层节点数为1。
[0033]
其中,电机的实时数据采集是采用控制变量法,当电机经过长时间运行温度达到稳定时,用计算机采集电机空载运行时不同转速下的电机转矩tn、电机转速v、电机温度t和环境温度t0。
[0034]
基于能量守恒原理,当电机经过长时间运行温度达到稳定时,测量电机空载运行时不同转速下空气流速、流量和进出电机的温差计算出电机的总损耗p
t
,公式为:
[0035]
p
t
=cmδt
[0036]
其中,c为空气比热容,m为单位时间内流过电机的空气质量,δt为进风口和出风口处风温的变化量。
[0037]
步骤2、环境模型以当前温度为基础预测未来温度趋势,采用mpc算法将未来温度趋势与真实环境进行交互,得到交互轨迹;
[0038]
所述交互轨迹的获取包括如下步骤:
[0039]
步骤2.1、以当前电机温度为状态s,电机的转速为动作a,构建基于当前状态和动作产生的状态转移函数和奖励值根据环境模型预测的未来温度趋势中收集模拟数据
[0040]
步骤2.2、从当前状态s0出发,对未来温度趋势中每个动作a,附上一个长度为t的动作序列,得到[a0,a1,a2,...,a
t
];
[0041]
步骤2.3、利用交叉熵方法获取最优动作序列,并且每次选取最优序列中的第一个动作ak来与环境模型交互;如图2所示,所述交叉熵方法获取最优动作序列的过程是先设定循环次数e,从动作序列分布p(n)选取n条动作序列a1,
···
,an,对于每条动作序列a1,
···
,an,用环境模块评估累计奖励,然后根据评估结果保留m条最优动作序列a
i1
,
···
,a
in
,用m条最优动作序列a
i1
,
···
,a
in
更新动作序列分布p(n),重复循环e次后,计算所有最优动作序列的第一个动作的均值,该均值作为当前时刻采取的动作。
[0042]
步骤2.4、通过此动作序列与环境模型交互出一条轨迹
[0043]
步骤3、根据交互轨迹对电机作出调速控温动作。
[0044]
如图3所述,所述调速控温动作包括如下步骤:
[0045]
步骤3.1、基于交互轨迹,对(s0,a0)计算得到一个以γ为衰减因子的累计奖励值,即
[0046]
步骤3.2、对每个动作a均执行步骤3.1的计算过程,选择一个最高累计价值的动作执行,即
[0047]
步骤3.3、建立约束关系:
[0048][0049]
在实际工作过程中,奖励值与温度变化成正相关,且温度不高于预设温度上限,转速不低于预设转速下限。
[0050]
综上所述,本发明通过采集电机的实时数据作为样本空间,然后建立与电机实时温度有关的神经网络模型作为环境模型,再采用mpc算法根据环境模型以当前温度为基础预测未来温度趋势并与真实环境进行交互,最后作出调速控温动作。本发明可以在电机的温度即将达到阈值上限时,可自动修改电机参数,使其在不停机的状态下减少发热量,并维持在一个合理的温度区间内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1