一种永磁同步电机容错运行控制方法及控制器和系统
1.本发明涉及电机控制领域,特别是涉及一种永磁同步电机容错运行控制方法及控制器和系统。
背景技术:
2.目前,随着电动汽车的推广以及电力电子变换器和电机驱动技术的发展,具有功率密度高、可靠性高、强容错性能等优点的多相电机成为了研究热点,已经广泛应用于电动汽车eps电机驱动系统或转向助力系统等场合。由于多相电机的相冗余特性,在发生相故障时,能够通过切除该相,采用容错控制算法,利用剩余健全相实现电机的稳态运行。
技术实现要素:
3.本发明的目的是提供一种在电机发生缺相故障时,仍然能够保持转矩和转速稳定的永磁同步电机容错运行控制方法及控制器和系统。
4.为实现上述目的,本发明提供了如下方案:
5.一种永磁同步电机容错运行控制方法,包括:
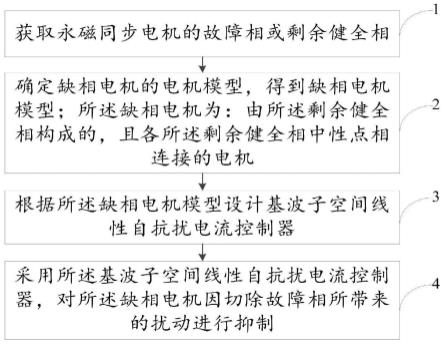
6.步骤1:获取永磁同步电机的故障相或剩余健全相;
7.步骤2:确定缺相电机的电机模型,得到缺相电机模型;所述缺相电机为:由所述剩余健全相构成的,且各所述剩余健全相中性点相连接的电机;
8.步骤3:根据所述缺相电机模型设计基波子空间线性自抗扰电流控制器;
9.步骤4:采用所述基波子空间线性自抗扰电流控制器,对所述缺相电机因切除故障相所带来的扰动进行抑制。
10.可选的,还包括:控制切除所述故障相以及控制各所述剩余健全相中性点连接。
11.可选的,还包括:所述永磁同步电机为全对称十二相永磁同步电机。
12.可选的,确定所述缺相电机的电机模型,得到所述缺相电机模型,包括:获取故障前永磁同步电机的电机旋转磁动势;根据故障前永磁同步电机的电机旋转磁动势计算缺相后重构的矢量空间解耦变换矩阵;根据所述缺相后重构的矢量空间解耦变换矩阵得到所述缺相电机模型。
13.可选的,所述缺相后重构的矢量空间解耦变换矩阵的计算公式如下:
14.根据故障前后电机旋转磁动势不变原则,计算所述缺相电机的基波子空间向量α、β;根据计算得到所述缺相后重构的矢量空间解耦变换矩阵,其中z1,z2……
,z9为构成重构矢量空间解耦变换矩阵的各行谐波子空间向量。
15.可选的,所述缺相电机模型包括基波子空间电压方程、谐波子空间电压、转矩方程
和运动方程。
16.可选的,根据所述基波子空间电压方程、所述谐波子空间电压、所述转矩方程和所述运动方程计算基波子空间线性自抗扰电流控制器状态方程;根据所述基波子空间线性自抗扰电流控制器状态方程得到所述基波子空间线性自抗扰电流控制器。
17.可选的,所述基波子空间线性自抗扰电流控制器包括状态观测器和耦合补偿项。
18.本发明还提供了一种永磁同步电机容错运行控制器,包括:
19.信息获取模块,用于获取永磁同步电机的故障相或剩余健全相;
20.模型建立模块,用于确定缺相电机的电机模型,得到缺相电机模型;所述缺相电机为:由所述剩余健全相构成的,且各所述剩余健全相中性点相连接的电机;
21.设计模块,用于根据所述缺相电机模型设计基波子空间线性自抗扰电流控制器;
22.扰动抑制模块,用于采用所述基波子空间线性自抗扰电流控制器,对所述缺相电机因切除故障相所带来的扰动进行抑制。
23.本发明还提供了一种永磁同步电机系统,包括:永磁同步电机、功率转接控制板、三相变流器以及电流传感器;其中,所述三相变流器与所述永磁同步电机电路连接;所述电流传感器用于采集三相变流器与所述永磁同步电机之间的电流,所述电流传感器采集到的电流用于确定故障相;所述功率转接控制板包括本发明提供的上述永磁同步电机容错运行控制器。
24.根据本发明提供的具体实施例,公开了以下技术效果:本发明提出了一种永磁同步电机容错运行控制方法,当电机发生缺相故障时,首先确定同步电机故障后的故障相以及剩余健全相,并将剩余健全相的中性点连接,构成一个缺相电机模型,根据缺相电机模型设计一种用于抑制因切除故障相所带来的扰动的基波子空间线性自抗扰电流控制器,通过抑制相应扰动,降低缺相后的转矩脉动,进而提高系统动态性能。保证了电机即使在发生缺相故障的情况下,也能利用剩余健全相实现电机的稳定运行。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.图1为本发明的十二相永磁同步电机控制方法流程图;
27.图2为本发明的十二相永磁同步电机控制装置总体结构图;
28.图3为本发明的十二相永磁同步电机结构图;
29.图4为本发明的十二相永磁同步电机缺w1相后结构图;
30.图5为本发明的基波子空间电流控制器结构框图;
31.图6为本发明的十二相永磁同步电机容错控制系统框图。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.本发明的目的是提供一种永磁同步电机容错运行控制方法及控制器和系统。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.如图1所示,本发明提供的永磁同步电机容错运行控制方法包括以下步骤:
36.步骤1:获取永磁同步电机的故障相或剩余健全相。
37.步骤2:确定缺相电机的电机模型,得到缺相电机模型;所述缺相电机为:由所述剩余健全相构成的,且各所述剩余健全相中性点相连接的电机。
38.步骤3:根据所述缺相电机模型设计基波子空间线性自抗扰电流控制器。
39.步骤4:采用所述基波子空间线性自抗扰电流控制器,对所述缺相电机因切除故障相所带来的扰动进行抑制。
40.在一些实施例中,在步骤2之前,还包括:
41.控制切除所述故障相以及控制各所述剩余健全相中性点连接。
42.具体的,以图3所示的全对称十二相永磁同步电机为例,当w1发生故障时,参见图4,对故障相w1进行切除,并将剩余健全相中性点连接,构成缺相电机。
43.在一些实施例中,步骤2具体包括:
44.获取故障前永磁同步电机的电机旋转磁动势。
45.根据故障前永磁同步电机的电机旋转磁动势计算缺相后重构的矢量空间解耦变换矩阵。
46.根据所述缺相后重构的矢量空间解耦变换矩阵得到所述缺相电机模型。
47.其中,根据故障前永磁同步电机的电机旋转磁动势计算缺相后重构的矢量空间解耦变换矩阵的步骤,具体如下:
48.以w1相故障为例,首先根据故障前后电机旋转磁动势不变原则,得到基波子空间向量α,β,具体如下所示:
[0049][0050][0051]
再根据矢量空间解耦的定义,利用如下公式,计算缺相后重构的矢量空间解耦变换矩阵:其中z1,z2……
,z9为构成重构矢量空间解耦变换矩阵的各行谐波子空间向量。
[0052]
计算得到的缺相后重构的矢量空间解耦变换矩阵为:
[0053][0054]
其中,根据所述缺相后重构的矢量空间解耦变换矩阵得到所述缺相电机模型,具体如下:
[0055]
由上述缺相后重构的矢量空间解耦变换矩阵可知,矢量空间解耦变换矩阵将自然坐标系下的不对称十一相交流变量降阶为静止坐标系下的交流变量,由于本发明使用转子磁链定向,对于基波子空间还需要做旋转变换,旋转变换矩为:
[0056]
结合计算得到的缺相后重构的矢量空间解耦变换矩阵,总的变换矩阵为:t
11r
=prt
11
,进而得到缺相电机模型。
[0057]
在一些实施例中,步骤3具体包括:
[0058]
根据所述缺相电机模型计算基波子空间线性自抗扰电流控制器状态方程;
[0059]
根据所述基波子空间线性自抗扰电流控制器状态方程得到所述基波子空间线性自抗扰电流控制器。
[0060]
其中,根据所述缺相电机模型计算基波子空间线性自抗扰电流控制器状态方程,具体可以如下:
[0061]
所述缺相电机模型包括基波子空间电压方程、谐波子空间电压方程、转矩方程和运动方程。
[0062]
缺相电机模型中的基波子空间电压方程,可以通过将旋转变换矩阵pr作用于电机正常运行时的电压方程计算得到,具体计算公式如下:
[0063]
[0064]
其中ψ
dq
表示d轴q轴的永磁体磁链,ωe表示电机转速的角速度;
[0065]
由此可以得到缺相后的不对称十一相电机基波子空间电压方程为:
[0066]
其中,
[0067]
为电机模型中的二倍频谐波分量,rs为定子电阻,l
aad
为定子d轴主自感,l
aaq
为定子q轴主自感,l
l
为定子漏感,ψf为永磁体磁链,θ为电角度。
[0068]
谐波子空间电压方程根据计算。
[0069]
电磁转矩方程根据te=6n
p
[ψfiq+(l
d-lq)idiq]计算,其中,n
p
为极对数。
[0070]
运动方程根据计算,其中,t
l
为负载转矩,b为阻尼系数,j为转动惯量,ωm机械角速度。
[0071]
根据所述基波子空间电压方程、谐波子空间电压、转矩方程和运动方程,计算基波子空间线性自抗扰电流控制器状态方程,公式如下:
[0072][0073]
其中,σm(id,ωe,θ)和σn(iq,ωe,θ)都是相对于基波两倍频的分量,将这两项都视为扰动项,bm=1/6l
aad
,bn=1/6l
aaq
,l
aad
为定子d轴主自感,l
aaq
为定子q轴主自感。
[0074]
由于基波子空间电流状态方程包含了电流耦合项、转速耦合项和二倍频扰动项,因此,需要抑制的总扰动也包括了电流耦合项、转速耦合项和二倍频扰动项。为了观测难以解耦的二倍频扰动,并对难以解耦的二倍频扰动进行提前补偿,根据所述基波子空间线性自抗扰电流控制器状态方程设计所述基波子空间线性自抗扰电流控制器。
[0075]
其中,根据所述基波子空间线性自抗扰电流控制器状态方程得到所述基波子空间线性自抗扰电流控制器,具体如下:
[0076]
根据基波子空间线性自抗扰电流控制器状态方程计算加入耦合项补偿的基波子空间线性自抗扰电流控制器的状态方程,公式如下:
[0077][0078]
其中,x1为观测对象即dq轴电流,x2为需要观测的二倍频扰动项,λ为耦合补偿项,对于d轴电流控制器,有λ=(l
aaq
/l
aad
)ωeiq,对于q轴电流控制器,λ=-(l
aad
/l
aaq
)ωei
d-6ωeψf/l
aaq
。
[0079]
观测难以解耦的二倍频扰动的线性扩张状态观测器leso方程如下,
[0080]
得到基波子空间电流控制器,所述基波子空间电流控制器的输出为:其中k
p
为比例系数,r为谐波子空间电流环参考信号,为dq轴电流观测值,为二倍频扰动项观测值,b0为控制器增益参数。
[0081]
本发明还提供了一种永磁同步电机容错运行控制器,包括:
[0082]
信息获取模块,用于获取永磁同步电机的故障相或剩余健全相;
[0083]
模型建立模块,用于确定缺相电机的电机模型,得到缺相电机模型;所述缺相电机为:由所述剩余健全相构成的,且各所述剩余健全相中性点相连接的电机;
[0084]
设计模块,用于根据所述缺相电机模型设计基波子空间线性自抗扰电流控制器;
[0085]
扰动抑制模块,用于采用所述基波子空间线性自抗扰电流控制器,对所述缺相电机因切除故障相所带来的扰动进行抑制。
[0086]
本发明还提供了一种永磁同步电机系统,包括永磁同步电机、功率转接控制板、三
相变流器以及电流传感器;
[0087]
其中,所述三相变流器与所述永磁同步电机电路连接;
[0088]
所述电流传感器用于采集三相变流器与所述永磁同步电机之间的电流,所述电流传感器采集到的电流用于确定故障相;
[0089]
所述功率转接控制板包括所述永磁同步电机容错运行控制器。
[0090]
如图2所示,在一些实施例中,一种永磁同步电机系统为全对称十二相永磁同步电机控制系统,包括:全对称十二相永磁同步电机1、第一功率转接控制板2-1、第二功率转接控制板2-2、第一变流器3-1、第二变流器3-2、第三变流器3-3、第四变流器3-4和直流母线4。
[0091]
其中,所述第一功率转接控制板2-1包括第一电流传感器2-1-1、第一db62接口2-1-2和第一db37接口2-1-3。所述第二功率转接控制板2-2包括第二电流传感器2-2-1、第二db62接口2-2-2和第二db37接口2-2-3。
[0092]
如图2所示,在一些实施例中,永磁同步电机系统还包括:
[0093]
所述直流母线4上并联着第一变流器3-1、第二变流器3-2、第三变流器3-3、第四变流器3-4,所述第一变流器3-1驱动全对称十二相永磁同步电机1的a1、b1、c1相电流,所述第二变流器3-2驱动全对称十二相永磁同步电机1的u1、v1、w1相电流,所述第三变流器3-3驱动全对称十二相永磁同步电机1的a2、b2、c2相电流,所述第四变流器3-4驱动全对称十二相永磁同步电机1的u2、v2、w2相电流。
[0094]
所述第一功率转接控制板db62接口2-1-2输入侧用于接收a1、b1、c1、u1、v1、w1相pwm控制信号,所述第一电流传感器2-1-1的输入侧与第一功率转接控制板2-1输入侧连接用于采集a1、b1、c1、u1、v1、w1相电流,并且所述第一电流传感器2-1-1的输出侧与第一功率转接控制板2-1输出侧连接,所述第一功率转接控制板db37接口2-1-3输出侧用于输出a1、b1、c1、u1、v1、w1相电流采样值,所述第一功率转接控制板2-1的输出侧与全对称十二相永磁同步电机1的a1、b1、c1、u1、v1、w1相输入侧连接。
[0095]
所述第二功率转接控制板db62接口2-2-2输入侧用于接收a2、b2、c2、u2、v2、w2相pwm控制信号,所述第二电流传感器2-2-1的输入侧与第二功率转接控制板2-2输入侧连接用于采集a2、b2、c2、u2、v2、w2相电流,并且所述第二电流传感器2-2-1的输出侧与第二功率转接控制板2-2输出侧连接,所述第二功率转接控制板db37接口2-2-3输出侧用于输出a2、b2、c2、u2、v2、w2相电流采样值,所述第二功率转接控制板2-2的输出侧与全对称十二相永磁同步电机1的a2、b2、c2、u2、v2、w2相输入侧连接。
[0096]
如图5所示,在一些实施例中,当十二相电机w1相发生故障时,通过断路器s
w1
切除w1相,而其他硬件电路不做改变。将剩余绕组视为整体,作为一个不对称十一相永磁同步电机进行容错控制。采用转速电流双闭环控制,外环为电压环,内环为电流环,通过采样电机健全十一相电流并做矢量空间解耦变换得到基波子空间和谐波子空间电流实际值,将其负反馈至电流环。
[0097]
由于矢量空间解耦变换矩阵为十一维矩阵,所需要控制的电流变量是十一维的,除去两个基波子空间分量,剩余的八个电流维度均为谐波子空间分量,采用pi闭环控制,谐波子空间电流给定值为零,降低电机铜耗。
[0098]
两维基波子空间电流采用线性自抗扰控制,其电流控制器结构如图6所示基波子空间电流控制器和谐波子空间电流控制器输出的电压给定值进行pwm调制,输出变流器的
驱动信号来控制功率器件的通断,控制电机的转速。
[0099]
综上所述,本发明具有以下优点:通过获取永磁同步电机的故障相或剩余故障相,将故障相切除,并将剩余健全相中性点相连接,得到缺相电机模型。并根据缺相电机模型设计基波子空间线性自抗扰电流控制器;在发生故障时,基波子空间线性自抗扰电流控制器通过对难以解耦的二倍频扰动提前进行补偿,来抑制因切除故障相所带来的扰动,通过将基波子空间电流环的交叉耦合相提前解耦,提高系统动态性能,降低缺相后的转矩脉动,即使是在电机发生缺相故障时,仍然保持转矩和转速的稳定,使永磁同步电机能够在故障下稳定的容错运行。
[0100]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例。公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可
[0101]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1