一种永磁同步电动机的二自由度电流控制器
本发明属于与航空电气与电力,具体涉及一种永磁同步电动机的二自由度电流控制器。
背景技术:
1、欧洲和美国在飞机和航空发动机电气化方面取得的成绩已经遥遥领先于我国。飞机和航空发动机电气化加快了新一代“多电飞机”和“全电飞机”的进程,例如美军联合攻击机f35、波音b787飞机、空客a380飞机等属于“多电飞机”。“多电/全电飞机”简化了飞机和发动机设备,减少发动机的迎风面积,改善空气动力学性能,减轻重量,提高飞机性能,降低飞机油耗等。具体而言,美国ge公司节能发动机fps-9测试表明,每秒钟提取1.5磅空气,燃油损耗增加2.18%,而提取与引气相当的150轴马力的机械能,燃油消耗只增加0.85%。
2、起动/发电一体化技术则是飞行器电气化的重要标志。起动/发电一体化技术将飞行器的起动系统与发电系统结合起来,飞行器起飞时,起发一体机带动发动机点火启动;飞行器正常飞行后,起发一体机为飞行器上电气负载提供电源支持。起动/发电系统中的起发一体机存在电动和发电两种运行状态,双向功率变换器也便存在逆变和整流两种运行工况。通过控制系统控制双向功率变换器的运行工况。当双向功率变换器工作在逆变工况时,控制系统的外环控制器为速度控制器,内环控制器为电流控制器。当双向功率变换器工作在整流工况时,控制系统的外环控制器为电压控制器,内环控制器为电流控制器。因此,对于双向功率变换器的控制系统而言,电流控制器是控制系统的核心。电流控制器负责跟踪电流的给定值。由于起动/发电一体机工作环境复杂多变,会受到飞行器飞行环境的影响,因此,电流控制器会受到各种干扰,比如周期性干扰和非周期性干扰,影响起动/发电一体机的控制性能。所以需要设计合适的控制器,使得系统能够快速准确地跟踪给定信号,并有效抑制扰动。跟踪性能主要评价控制器跟踪给定信号的能力,抗扰性能主要评价控制器抑制扰动的能力。但是传统单自由度控制器(比如比例积分控制器)通常只能在跟踪性能和抗扰性能之间做权衡,无法满足高性能电流控制器的需求。二自由度控制器能解决单自由度控制器无法兼顾跟踪性能和抗扰性能的问题,研究先进的二自由度控制策略对于提高永磁同步电机电流环控制器有重要意义。
3、因此,尤其是永磁同步电动机存在未知干扰的情况下,对永磁同步电动机电流的准确跟踪是非常有价值的,能提高永磁同步电动机工作的可靠性,从而保证航空起动/发电一体机系统的稳定工作。
4、在永磁同步电动机电流控制器方面,国内外公开发表的文献都是基于比例积分方法或者比例积分微分方法设计电流控制器。在永磁同步电机双闭环控制系统中,对电流环控制器的要求是使得电机电流快速跟随到给定电流,同时对电流环中的扰动具有良好的抑制作用。传统比例积分(pi)控制器是一种单自由度控制器,无法兼顾跟踪性能和抗扰性能,只能在这两个性能之间做权衡,显然无法满足现代永磁同步电机控制系统越来越高的性能需求。故提出了传统的二自由度控制技术,虽然典型的二自由度比例-扩张状态观测器(p-leso)电流控制器性能得到一定程度的提高,但是抗扰效果仍然有效,故需要对加强扰动的主动抑制。
5、对于永磁同步电动机电流控制器而言,当前的设计方法已经渐渐满足不了工程的实际需要,无法对6次电流谐波进行抑制。因此,探索出一种有效且适用于工程实践的高精度永磁同步电动机电流控制器设计方法成为一个亟需解决的问题。永磁同步电动机电流的高精度和高鲁棒性跟踪也因此具备了广阔的研究和应用前景。
技术实现思路
1、本发明是为了解决现有技术存在的精度不高,鲁棒性不强,永磁同步电动机电流跟踪控制精度不高的问题,而提出的一种二自由度电流跟踪控制的方法。
2、一种永磁同步电动机二自由度电流控制器,具体步骤如下:
3、步骤1:为了便于分析,首先定义坐标系,数学表达式具体如下:
4、为了便于分析,首先定义坐标系,定义坐标系的目的是为了将三相静止旋转坐标系下的交流电vabc转换到两相静止坐标系υαβ,最终转换到两相旋转坐标系υqd,从而实现永磁同步电动机三相电流的解耦控制,即只需要对dq轴电流进行控制,从而就能达到控制abc三相电流的目的,各个坐标系之间的转换关系可用公式(1)描述;
5、
6、其中,
7、vabc·[va vb vc]t,υαβ=[υα υβ]t,υqd=[υq υd]t,
8、为永磁同步电动机的电角度。
9、步骤2:根据永磁同步电机矢量控制架构,得到永磁同步电动机电流环模型;
10、由于永磁同步电动机一般采用串级控制结构,内环为dq轴电流环控制器,其电流环的数学模型满足公式(2)。
11、
12、式中,ud、uq分别表示d-q轴的输入电压;ωe表示永磁同步电机电角速度;id、iq分别表示定子电流在d-q轴的分量;ld、lq分别表示电感在d-q轴的分量,对于表贴式永磁同步电机,满足ld=lq;ψf表示永磁体磁链。
13、步骤3:考虑周期扰动情况下,得到周期扰动与永磁同步电动机电流之间的数学表达式,具体如下:
14、由于周期性扰动存在情况下,周期性扰动一般由磁链谐波分量死区时间引起的。其中,为了避免三相桥式逆变电路同一桥臂上下开关管同时导通产生短路电流,需要在上(下)桥臂关断后延迟一小段时间再打开下(上)桥臂,这一小段时间就是死区时间。磁链谐波分量和死区时间分别能引入周期性扰动,分别满足公式(3)、公式(4);
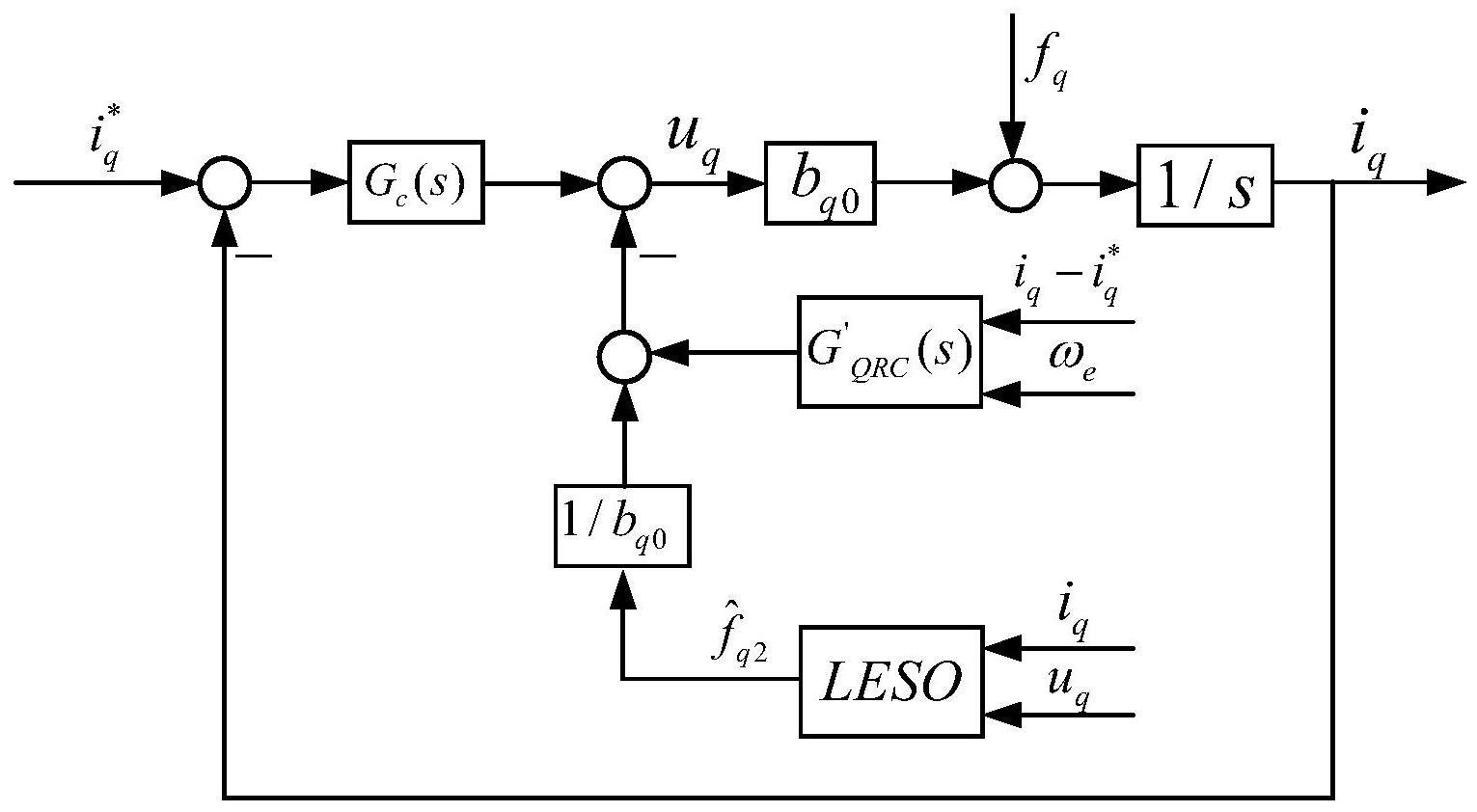
15、
16、
17、式中,ψfd6n、ψfq6n分别表示d轴和q轴下6n次磁链谐波分量幅值。ts为开关周期,td为死区时间,udc为直流母线电压,n为正整数。ψfd为d轴下6n次磁链谐波分量幅值,ψfq为q轴下6n次磁链谐波分量幅值。
18、步骤4:考虑非周期性扰动的情况下,得到非周期扰动与永磁同步电动机电流之间的数学表达式,具体如下:
19、考虑非周期扰动的情况下,主要考虑电感参数引起的非周期扰动,如公式(5)所示;
20、
21、其中,令bd=1/ld,bq=1/lq,定义ld0,lq0为电机d-q轴电感参数的标称值,
22、δbd=bd-bd0,δbq=bq-bq0,fd1和fq1分别表示d轴和q轴的周期性扰动。定义fd2,fq2分别表示d轴和q轴的非周期性扰动,δbd=bd-bd0,δbq=bq-bq0,fd1和fq1分别表示d轴和q轴的周期性扰动。定义fd2,fq2分别表示d轴和q轴的非周期性扰动。
23、步骤5:基于步骤3和步骤4设计二自由度电流控制器;
24、步骤6:在matlab/simulink环境下,采用模块化建模技术,搭建永磁同步电动机模型和搭建永磁同步电动机电流控制器,验证二自由度控制器的性能,将二自由度速度控制器的跟踪效果与比例积分速度控制器的跟踪效果进行比较,在面对周期扰动和非周期扰动的情况下,二自由度电流控制器的精度更高,说明本发明提出的方法是能准确地对电流进行跟踪控制。
25、本发明的有益效果:
26、现有永磁同步电动机电流控制器,实现电流高精度的跟踪有一定的困难。在工程实践中,目前普遍采用是基于比例积分的方法设计速度控制器。本发明提供了一种二自由度电流控制器,弥补了现有比例积分控制器技术的不足。本发明将改进的二自由度控制技术应用到永磁同步电动机的电流跟踪,操作简单,鲁棒性强,并可实现速度的高精度跟踪。该方法具有一定的拓展性,可推广到其它领域。
- 还没有人留言评论。精彩留言会获得点赞!