一种架空线路带电作业机器人专用升降装置及系统的制作方法
本发明涉及架空线路运维,尤其涉及一种架空线路带电作业机器人专用升降装置及系统。
背景技术:
1、随着科学技术的发展,机器人逐渐应用于电力行业,代替作业人员进行一些危险作业。但由于架空线路所处位置较高,线路复杂,特别是配网线路纵横交错等特殊性,极大地限制了机器人在行业中的应用。目前电网架空线路使用的机器人的上线方式为绝缘斗车搭载机器人,或使用人工登高使机器人挂载到电缆上。因此,存在以下问题点:
2、1、绝缘斗车体积较大,行动范围有限,若遇到湖畔或者线路复杂地段则无法工作,具有较大局限性;
3、2、因为现在施工作业多为不停电施工,搭载作业人员进行高空挂载过程中,近距离接触带电导线有触电的安全隐患;
4、3、目前使用的挂载方式操作复杂,反而降低了作业效率。
5、由于存在上述问题点,阻碍了电网架空线路的智能化进程,并且一直未能得到有效的解决方法。因此,需要设计一种便于操作的机器人上线装置,降低作业难度,提高作业效率和适用范围,避免登高作业带来的安全隐患。
技术实现思路
1、本发明所要解决的技术问题是针对上述现有技术的不足,提供一种架空线路带电作业机器人专用升降装置及系统,主要应用于架空线路带电作业机器人上线操作,解决作业机器人上线困难的问题,并通过结构设计,使其操作更加便捷,提高工作人员作业效率。
2、本发明解决上述技术问题的技术方案如下:一种架空线路带电作业机器人专用升降装置,包括升降驱动机构、主动轮、牵引绳和连杆,所述升降驱动机构安装于作业机器人上,所述牵引绳绕设于所述主动轮上,所述牵引绳的两端分别分别通过滑轮与所述连杆的两侧对应位置处连接,所述连杆上设置有挂钩驱动机构,所述挂钩驱动机构的驱动端设置有挂钩,所述挂钩驱动机构可驱动所述挂钩转动,以使得所述挂钩挂设于作业的架空线路上,所述驱动机构与所述主动轮传动连接,并驱动所述牵引绳收放,以使得整个装置连同作业机器人一同升降运动。
3、本发明的有益效果是:本发明的架空线路带电作业机器人专用升降装置,通过所述挂钩驱动机构驱动所述挂钩转动,可以方便所述挂钩挂设于作业的架空线路上,通过升降驱动机构驱动所述主动轮收放所述牵引绳,从而完成整个装置连同作业机器人一同升降运动,整个装置更加轻便,体积小巧,上线操作只需要无人机或者绝缘杆将挂钩挂载到电缆上即可自动完成上线作业,无需人员登高或者靠近电缆,降低安全隐患,采用整体式结构,结构简单耐用,承载能力强,并且由于不使用绝缘斗车等大型器械,可应用于多种复杂地形,使机器人上线不再受地形、环境限制。
4、在上述技术方案的基础上,本发明还可以做如下改进:
5、进一步:所述升降驱动机构包括升降电机、减速器和电机支架,所述电机支架安装于作业机器人上,所述升降电机和减速器分别安装于所述电机支架上,所述升降电机与所述减速器轴连接,所述减速器与所述主动轮传动连接,且所述升降电机驱动所述减速器控制所述主动轮转动。
6、上述进一步方案的有益效果是:通过所述升降电机驱动所述减速器控制所述主动轮转动,通过驱动所述主动轮收放所述牵引绳,从而完成整个装置连同作业机器人一同升降运动,通过所述减速器可以控制转速,进而控制升降速度。
7、进一步:所述牵引绳的数量为两根,且两根所述牵引绳的一端分别与所述主动轮连接,且两根所述牵引绳的另一端分别与所述连杆的两侧对应位置处连接。
8、上述进一步方案的有益效果是:通过设置两根所述牵引绳,可以使得整个装置的升降运动更加平稳,保证工作的可靠性。
9、进一步:所述的架空线路带电作业机器人专用升降装置还包括两个滑轮支架,所述滑轮支架设置在作业机器人上,并位于所述升降驱动机构的两侧,所述滑轮分别转动设置在所述滑轮支架上。
10、上述进一步方案的有益效果是:通过设置所述滑轮支架,可以对所述滑轮起到支撑作用,保证所述升降驱动机构驱动所述主动轮收放所述牵引绳时,所述牵引绳可以更加稳定地驱动整个装置的升降运动。
11、进一步:所述挂钩驱动机构的数量为两个,且两个所述挂钩驱动机构间隔对称设置在所述连杆上。
12、上述进一步方案的有益效果是:通过设置两个所述挂钩驱动机构,可以使得整个装置的受力更加平衡,提高受力承载强度,并且通过对称设置,可以保证进一步保证受力的平衡性。
13、进一步:两个所述挂钩驱动机构分别与两个所述牵引绳的另一端上下对齐设置。
14、上述进一步方案的有益效果是:通过将两个所述挂钩驱动机构分别与两个所述牵引绳的另一端上下对齐设置,这样可以使得受力竖向传导,提高整个装置受力的稳固性,避免左右晃动。
15、进一步:所述挂钩驱动机构包括挂钩支架和挂钩电机,所述挂钩支架设置在所述连杆上,且所述挂钩电机安装于对应的所述挂钩支架上,所述挂钩电机的驱动端与所述挂钩转动。
16、上述进一步方案的有益效果是:通过所述挂钩支架对所述挂钩电机起到较好的支撑作用,从而方便所述挂钩电机更加平稳地驱动所述挂钩转动,方便将挂钩挂载于架空线路上,方便机器人进行作业。
17、本发明还提供了一种架空线路带电作业机器人专用升降系统包括控制器、无线通信电路和所述的架空线路带电作业机器人专用升降装置,所述控制器与所述无线通讯电路无线连接,所述无线通讯电路分别与所述升降驱动机构和挂钩驱动机构电连接。
18、本发明的架空线路带电作业机器人专用升降系统,所述控制器通过所述无线通信电路与所述升降驱动机构和挂钩驱动机构之间进行数据传输,从而实现远程无线控制,非常方便,大大降低了作业难度,提高了作业的便捷性和安全性。
技术特征:
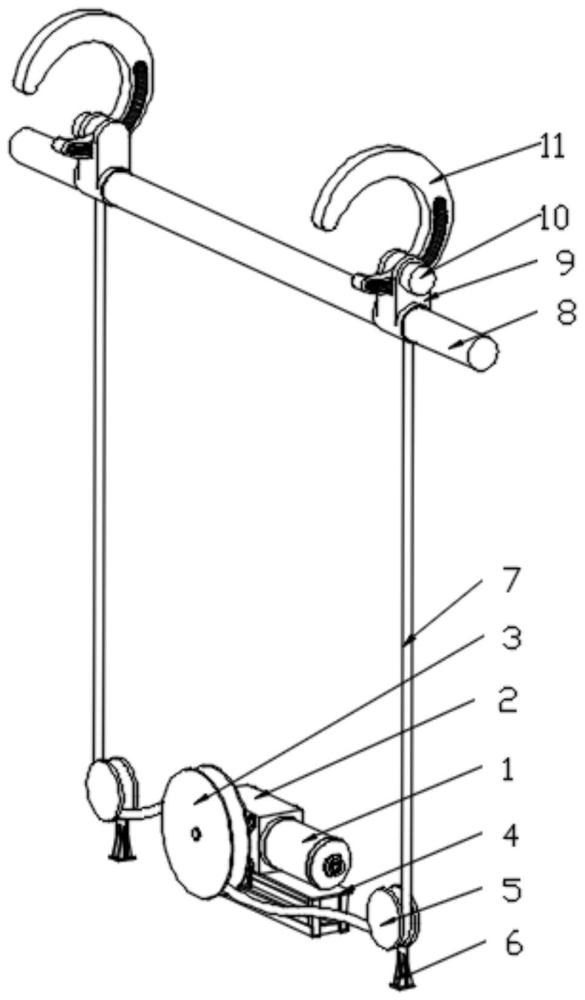
1.一种架空线路带电作业机器人专用升降装置,其特征在于:包括升降驱动机构、主动轮(3)、牵引绳(7)和连杆(8),所述升降驱动机构安装于作业机器人上,所述牵引绳(7)绕设于所述主动轮(3)上,所述牵引绳(7)的两端分别分别通过滑轮(5)与所述连杆(8)的两侧对应位置处连接,所述连杆(8)上设置有挂钩驱动机构,所述挂钩驱动机构的驱动端设置有挂钩(11),所述挂钩驱动机构可驱动所述挂钩(11)转动,以使得所述挂钩(11)挂设于作业的架空线路上,所述驱动机构与所述主动轮(3)传动连接,并驱动所述牵引绳(7)收放,以使得整个装置连同作业机器人一同升降运动。
2.根据权利要求1所述的架空线路带电作业机器人专用升降装置,其特征在于:所述升降驱动机构包括升降电机(1)、减速器(2)和电机支架(4),所述电机支架(4)安装于作业机器人上,所述升降电机(1)和减速器(2)分别安装于所述电机支架(4)上,所述升降电机(1)与所述减速器(2)轴连接,所述减速器(2)与所述主动轮(3)传动连接,且所述升降电机(1)驱动所述减速器(2)控制所述主动轮(3)转动。
3.根据权利要求1所述的架空线路带电作业机器人专用升降装置,其特征在于:所述牵引绳(7)的数量为两根,且两根所述牵引绳(7)的一端分别与所述主动轮(3)连接,且两根所述牵引绳(7)的另一端分别与所述连杆(8)的两侧对应位置处连接。
4.根据权利要求3所述的架空线路带电作业机器人专用升降装置,其特征在于:还包括两个滑轮支架(6),所述滑轮支架(6)设置在作业机器人上,并位于所述升降驱动机构的两侧,所述滑轮(5)分别转动设置在所述滑轮支架(6)上。
5.根据权利要求3所述的架空线路带电作业机器人专用升降装置,其特征在于:所述挂钩驱动机构的数量为两个,且两个所述挂钩驱动机构间隔对称设置在所述连杆(8)上。
6.根据权利要求5所述的架空线路带电作业机器人专用升降装置,其特征在于:两个所述挂钩驱动机构分别与两个所述牵引绳(7)的另一端上下对齐设置。
7.根据权利要求6所述的架空线路带电作业机器人专用升降装置,其特征在于:所述挂钩驱动机构包括挂钩支架(9)和挂钩电机(10),所述挂钩支架(9)设置在所述连杆(8)上,且所述挂钩电机(10)安装于对应的所述挂钩支架(9)上,所述挂钩电机(10)的驱动端与所述挂钩(11)转动。
8.一种架空线路带电作业机器人专用升降系统,其特征在于:包括控制器、无线通信电路和权利要求1-7任一项所述的架空线路带电作业机器人专用升降装置,所述控制器与所述无线通讯电路无线连接,所述无线通讯电路分别与所述升降驱动机构和挂钩驱动机构电连接。
技术总结
本发明涉及一种架空线路带电作业机器人专用升降装置及系统,其装置包括升降驱动机构、主动轮、牵引绳和连杆,升降驱动机构安装于作业机器人上,牵引绳绕设于主动轮上,牵引绳的两端分别分别通过滑轮与连杆的两侧对应位置处连接,连杆上设置有挂钩驱动机构,挂钩驱动机构的驱动端设置有挂钩,挂钩驱动机构可驱动挂钩转动,驱动机构与主动轮传动连接,并驱动牵引绳收放。本发明整个装置更加轻便,体积小巧,上线操作只需要无人机或者绝缘杆将挂钩挂载到电缆上即可自动完成上线作业,降低安全隐患,采用整体式结构,结构简单耐用,承载能力强,并且由于不使用绝缘斗车等大型器械,可应用于多种复杂地形,使机器人上线不再受地形、环境限制。
技术研发人员:丁乐,张威,赵浩森,梅庆,万铭,罗海蓉,敖倩,蔡一凡,袁红艳
受保护的技术使用者:国网湖北省电力有限公司荆州供电公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!