输电线路排查用巡检机器人及输电线路排查用巡检方法与流程
本发明输电线路排查用巡检机器人及输电线路排查用巡检方法涉及输电线路巡检机器人。
背景技术:
1、为了确保输电稳定和安全,需要定期对输电线路进行巡检。早期采用人工巡检方式,需要作业人员穿上专业设备后爬到高压线路上进行巡检,典型的专业设备包括安全带,例如申请号202022206823.3的实用新型专利《一种高空输电线路维修巡检用安全带》,这种方式,作业环境恶劣,劳动强度大,为了解决上述问题,又出现了巡检机器人,例如申请号201922396576.5的实用新型专利《一种基于输电线路巡检用的机器人》,通过设置第一马达、齿轮配合齿板,可控制第一滑动架和第二滑动架轮流升降,进而可在遇到障碍物时将被阻挡的轮子升起,进而可轻松的越过障碍物,且两侧始终保持有两个轮子搭在线路上,可保持平衡,操作简单方便,但这种机器人无法对不同宽度的线缆进行检测。
2、针对上述问题,申请号202222375584.3的实用新型专利《一种输电线路用巡检机器人》给出了解决方案,该巡检机器人包括机身,机身的上表面固定安装有支撑板,支撑板的上表面固定安装有电机,电机的前表面设置有线缆移动机构,机身的内部设置有伸缩检测机构;
3、线缆移动机构包括承重柱、轴杆、链条、运动轮、旋钮、伸缩杆和限位轮,机身的上表面固定连接有承重柱,承重柱的内部表面活动安装有轴杆,轴杆的表面活动连接有链条,轴杆的前端表面固定连接有运动轮,承重柱的前表面活动安装有旋钮,旋钮的后表面活动连接在伸缩杆的表面,伸缩杆的后表面活动安装有限位轮。
4、该巡检机器人,具备以下有益效果:
5、第一、通过在机身的内部安装了线缆移动机构和伸缩检测机构,从线缆在运动轮与限位轮之间,旋转旋钮挤压伸缩杆将其固定,电机的输出端会通过链条带着运动轮转动,带着机身在线缆上向前移动,避免人工巡检,直接将设备放置在输电线路上,便可操作其顺着电线移动巡检,避免人工检查存在的安全隐患,并且可根据电线的宽度对其进行限位,避免在巡检的过程中发生设备脱离电线的问题。
6、第二、只需拉伸拉板到合适的位置,螺栓将伸拉板与机身拧紧,红外扫描头对线缆扫描,随后将形成的模型再传输给中心处理器,中心处理器发射信号给工作人员,完成对各种宽度的线缆进行检查的目的,可以根据两条线缆的距离进行调节,巡检的适用范围加大,并且对线缆的完整度检测更准确。
7、然而,现有巡检机器人仅通过滚轮与输电线路进行支撑,无法有效调节移动时的摩擦力,尤其是在输电线路处于倾斜状态时,非常容易出现巡检机器人打滑的问题,无法保证其顺利平稳移动,且巡检机器人安装和拆卸不便,给使用带来不便。
技术实现思路
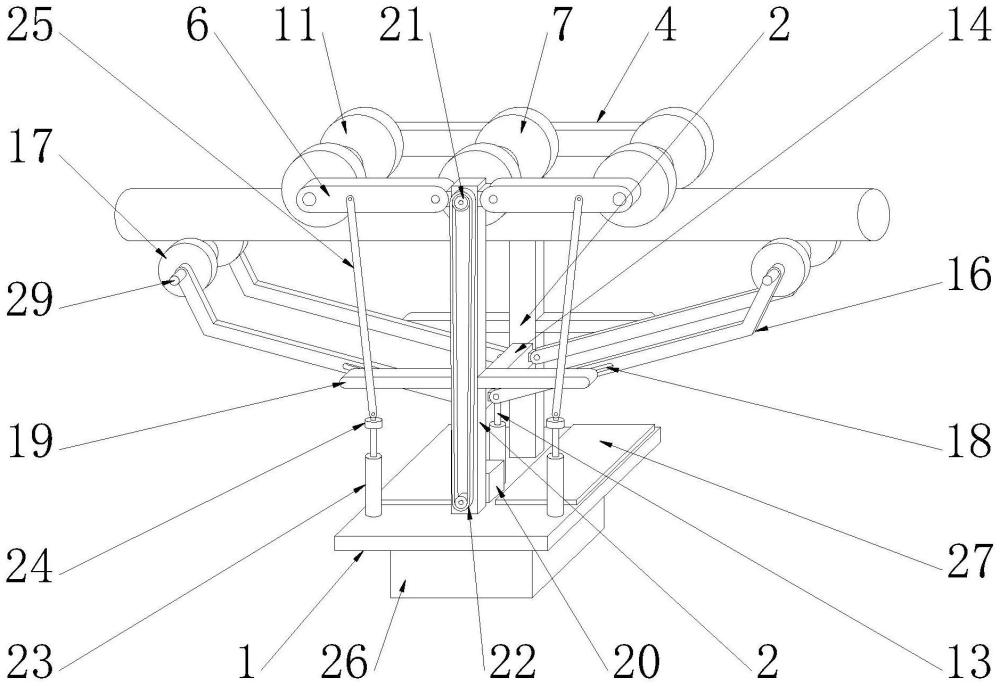
1、为了解决现有技术的不足,本发明设计了一种输电线路故障排查用巡检机器人,由底板、立杆、驱动轮、上压轮和下压轮组成,可实现与输电线轮的稳定支撑,能够通过上压轮和下压轮的配合实现与输电线路的挤压接触,保证压轮与输电线路之间具有足够摩擦力,有效防止巡检机器人打滑问题;通过设置活动板可实现摆杆旋转,并通过设置连杆进行活动横杆转动,快速调节下压轮和上压轮,进而根据巡检机器人移动时的稳定性进行调整,并具有越障功能,确保巡检机器人顺利通行;通过设置可活动的转动杆以及固定横杆,方便对巡检机器人进行拆卸,同时能够调整安装壳与输电线路的距离,能够在巡检过程中对输电线路进行高清拍摄,同时不影响转动杆的限位,实现巡检机器人与输电线路的稳定连接,避免脱落。
2、本发明的目的是这样实现的:
3、输电线路故障排查用巡检机器人,由底板、立杆、驱动轮、上压轮和下压轮组成;
4、所述底板顶部设有两个立杆,其中一个所述立杆长度小于另一个立杆长度,所述立杆顶部与驱动轮转动连接,所述立杆顶部与转动杆铰接,所述转动杆顶部设有两个对称分布的固定横杆,所述固定横杆两端都开设有若干个均匀分布的定位孔,每个所述定位孔都为圆锥形的空心结构,且所述定位孔内部与连接轴嵌合插接,所述立杆顶部与活动横杆转动连接,所述固定横杆的宽度大于活动横杆的宽度,所述活动横杆通过连接轴与驱动轮转动连接,且所述连接轴与固定横杆内部嵌合连接,所述活动横杆端部与上压轮转动连接,所述立杆侧壁与活动板滑动连接,所述活动板与摆杆转动连接,所述摆杆顶部与下压轮转动连接。
5、上述的输电线路故障排查用巡检机器人,所述立杆顶部设有两个对称分布的活动横杆,每个所述活动横杆都与连接轴固定连接,所述连接轴与上压轮转动连接,所述上压轮的数量为两个,两个所述上压轮对称分布至驱动轮两侧,两个所述上压轮分别位于两个下压轮之间,且两个所述上压轮对称分布至驱动轮两侧。
6、上述的输电线路故障排查用巡检机器人,所述摆杆的数量为两个,两个所述摆杆都为弯折状结构,两个所述摆杆对称分布至立杆两侧,每个所述摆杆顶部都设有下压轮,所述摆杆顶端与第二电机固定连接,所述第二电机输出端与下压轮固定连接,所述上压轮、下压轮和驱动轮都为高分子绝缘材料,所述上压轮、下压轮和驱动轮都接触有输电线路。
7、上述的输电线路故障排查用巡检机器人,所述立杆底部与四个固定杆固定连接,每两个所述固定杆分别位于立杆两侧,每个所述立杆端部都与连接杆固定连接,所述摆杆中部开设有长孔,所述连接杆延伸至长孔内部,且所述连接杆与长孔内部滑动连接。
8、上述的输电线路故障排查用巡检机器人,所述底板表面固定安装有第二电动推杆,所述第二电动推杆伸缩端与活动板固定连接,所述活动板两端都与滑块固定连接,所述活动板位于立杆之间,每个所述立杆内侧壁都开设有滑槽,每个所述滑槽内部都与滑块滑动连接,且所述活动板两端都设有平行分布的摆杆。
9、上述的输电线路故障排查用巡检机器人,所述底板表面与第三电动推杆固定连接,所述第三电动推杆的数量为两个,两个所述第三电动推杆对称分布至其中一个立杆两侧,所述第三电动推杆伸缩端与连接块固定连接,所述连接块与连杆一端转动连接,且所述连杆另一端与活动横杆中部转动连接。
10、上述的输电线路故障排查用巡检机器人,所述转动杆侧壁与固定板固定连接,所述固定板与第一电动推杆的伸缩端转动连接,所述第一电动推杆倾斜分布至立杆一侧,且所述第一电动推杆与底板表面转动连接。
11、上述的输电线路故障排查用巡检机器人,所述底板表面与第一电机固定连接,所述第一电机输出端与立杆底部转动连接,所述第一电机输出端和驱动轮都与带轮固定连接,且所述带轮之间通过皮带传动连接。
12、上述的输电线路故障排查用巡检机器人,所述底板底部和表面分别固定连接有安装壳和太阳能板,所述底板表面固定安装有用于输电线路检测的高清摄像头,所述安装壳内部固定安装有用于巡检机器人动力供应的蓄电池,所述太阳能板的数量为两个,两个所述太阳能板分别位于立杆两侧,且所述太阳能板与蓄电池电性连接。
13、输电线路故障排查用巡检方法,步骤如下:
14、缩短第一电动推杆,带动固定板和转动杆旋转,转动杆带动固定横杆围绕转动杆底部转动,使连接轴与定位孔内部分离,此时,将输电线路故障排查用巡检机器人安装在输电线轮上,驱动轮和上压轮位于输电线路上方,再伸长第一电动推杆,带动固定横杆复位,使连接轴与定位孔重新连接,再缩短第二电动推杆,带动活动板向下移动,活动板带动滑块在滑槽内部移动,使活动板拉动摆杆旋转,摆杆中部的长孔内部设置连接杆,使摆杆围绕连接杆旋转,进而带动下压轮向上移动,使下压轮压紧输电线路底部,使上压轮与下压轮配合,对输电线路压紧固定,保证输电线路故障排查用巡检机器人稳定移动,解决移动时的打滑问题;
15、在越障时,先通过下压轮与输电线路分离,此时通过第一电机带动带轮转动,皮带和带轮传动,带动驱动轮旋转,实现输电线路故障排查用巡检机器人移动,当障碍位于上压轮处时,通过转动杆旋转后,通过第三电动推杆伸长推动连接块上移,使其推动连杆旋转,连杆推动活动横杆转动后,重新将转动杆旋转至原处,此时驱动轮带动巡检机器人继续移动,当障碍位于驱动轮处时,活动横杆反向旋转,使驱动轮与输电线路分离,且两个上压轮位于输电线轮表面,并通过下压轮接触输电线路,此时通过第二电机带动下压轮转动,实现巡检机器人的继续移动;
16、在使用过程中,通过安装壳进行蓄电池的安装,通过太阳能板进行光能转换,并通过转化后由蓄电池进行电能储存,实现第一电动推杆、第二电动推杆、第三电动推杆、第一电机和第二电机的电能供应,并在底板上安装高清摄像头进行输电线路巡检,并通过第三电动推杆缩短,使其拉动底板和安装壳上移,此时驱动轮与输电线路分离,并通过下压轮作为驱动实现输电线路故障排查用巡检机器人移动,在巡检过程中调节高清摄像头与输电线路之间的距离,能够对故障位置进行检测。
17、有益效果:
18、本发明输电线路故障排查用巡检机器人,由底板、立杆、驱动轮、上压轮和下压轮组成,结构合理可靠且能够保证移动稳定性,能够方便快速安装;具体如下:
19、第一、通过上压轮和下压轮配合,实现与输电线路挤压接触,保证压轮与输电线路之间具有足够的摩擦力,适应于巡检机器人攀登过程中使用,有效防止巡检机器人打滑,提高巡检机器人的移动稳定性;
20、第二、通过设置活动板实现摆杆旋转,并通过设置连杆进行活动横杆转动,进行下压轮和上压轮快速调节,进而能够根据巡检机器人移动时的稳定性进行调整,并具有越障功能,确保巡检机器人顺利通行;
21、第三、通过设置可活动的转动杆和固定横杆,实现巡检机器人的有效安装,方便对巡检机器人进行拆卸,同时能够调整安装壳与输电线路的距离,能够在巡检过程中对输电线路进行高清拍摄功能,同时不影响转动杆的限位,实现巡检机器人与输电线路的稳定连接,避免巡检机器人脱落。
- 还没有人留言评论。精彩留言会获得点赞!