双惯量模型的跟踪控制方法、装置、设备及存储介质与流程
本技术涉及伺服驱动,尤其涉及一种双惯量模型的跟踪控制方法、装置、设备及存储介质。
背景技术:
1、随着我国国民经济的发展和企业自动化水平的提高,对高性能伺服系统的需求也越来越大。为了实现功能多样性,实际伺服系统中电机与负载间多由传动轴系、皮带、减速器、滚珠丝杠、齿轮、减速箱等机构进行动力传输,而这必然会为系统引入弹性连接和背隙,从而导致系统产生跟踪误差,造成机械谐振现象,严重降低系统稳定性以及快速定位能力。
技术实现思路
1、本技术实施例通过提供一种双惯量模型的跟踪控制方法、装置、设备及存储介质,旨在解决伺服系统的跟踪误差导致的机械谐振的问题,能够抑制系统的振动,提高快速定位能力。
2、本技术实施例提供了一种含背隙的双惯量模型的跟踪控制方法,所述含背隙的双惯量模型的跟踪控制方法,包括:
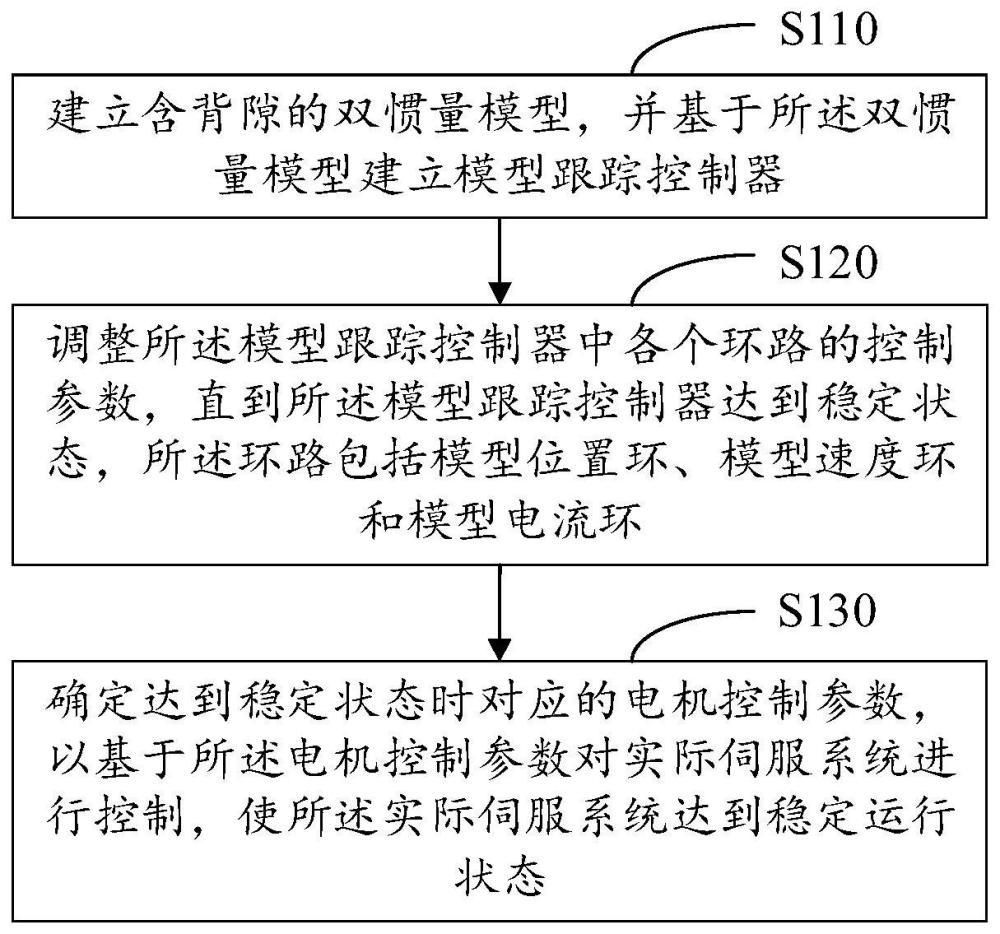
3、建立含背隙的双惯量模型,并基于所述双惯量模型建立模型跟踪控制器;
4、调整所述模型跟踪控制器中各个环路的控制参数,直到所述模型跟踪控制器达到稳定状态,所述环路包括模型位置环、模型速度环和模型电流环;
5、确定达到稳定状态时对应的电机控制参数,以基于所述电机控制参数对实际伺服系统进行控制,使所述实际伺服系统达到稳定运行状态。
6、可选地,所述建立含背隙的双惯量模型,并基于所述双惯量模型建立模型跟踪控制器的步骤包括:
7、获取电机对应的第一机械参数,负载对应的第二机械参数、传动机构对应的第三机械参数,以及所述传动机构中的背隙值;
8、根据所述第一机械参数构建电机的第一传递函数,根据所述第二机械参数构建负载的第二传递函数,根据所述第三机械参数和所述背隙值构建所述电机和所述传动机构的输入输出关系,以及所述负载和所述传动机构的输入输出关系;
9、基于所述第一传递函数、所述第二传递函数、所述电机和所述传动机构的输入输出关系,以及所述负载和所述传动机构的输入输出关系,形成所述含背隙的双惯量模型;
10、设置模型位置环、模型速度环和模型电流环;
11、根据所述模型位置环、所述模型速度环、所述模型电流环和所述双惯量模型,建立所述模型跟踪控制器。
12、可选地,所述第一机械参数包括:电机惯量和电机阻尼系数;所述第二机械参数包括:负载惯量和负载阻尼系数;所述第三机械参数包括:传动轴刚度和传动轴阻尼系数。
13、可选地,所述调整所述模型跟踪控制器中各个环路的控制参数,直到所述模型跟踪控制器达到稳定状态的步骤包括:
14、实时获取所述模型跟踪控制器输出的模型负载位置和模型负载速度;
15、将模型速度环输出的电流指令作为所述模型电流环的输入,并调整所述模型电流环中的控制参数,直到所述电流环输出的模型电机转矩达到期望状态;
16、将模型位置环输出的速度指令和所述模型负载速度作为所述模型速度环的输入,并调整所述模型速度环中的控制参数,直到所述速度指令和所述模型负载速度达到稳态;
17、将位置指令和所述模型负载位置作为所述模型位置环的输入,并调整所述模型位置环中的控制参数,直至所述位置指令和所述模型负载位置达到稳态;
18、当所述电流环输出的模型电机转矩达到期望状态、所述速度指令和所述模型负载速度达到稳态,以及所述位置指令和所述模型负载位置达到稳态时,确定所述模型跟踪控制器达到稳定状态。
19、可选地,所述实时获取所述模型跟踪控制器输出的模型负载位置和模型负载速度的步骤包括:
20、获取所述传动机构上一次反馈的模型负载受力,以及获取期望负载受力;
21、根据所述模型负载受力和所述期望负载受力,确定所述双惯量模型的目标受力;
22、将所述目标受力经过所述双惯量模型的第二传递函数进行计算,得到模型负载速度;
23、对所述模型负载速度进行积分计算,得到模型负载位置。
24、可选地,所述确定达到稳定状态时对应的电机控制参数的步骤包括:
25、根据达到期望负载电流时的输出信号,确定模型电机转矩;
26、获取所述传动机构上一次反馈的模型电机转矩;
27、根据上一次反馈的模型电机转矩和达到所述期望负载电流时对应的模型电机转矩,确定所述双惯量模型的目标转矩;
28、将所述目标转矩经过所述双惯量模型中的第一传递函数进行计算,得到模型电机转速;
29、对所述模型电机转速进行积分计算,得到模型电机位置;
30、将所述达到所述期望负载电流时对应的模型电机转矩、所述模型电机转速和所述模型电机位置,作为所述电机控制参数。
31、可选地,所述含背隙的双惯量模型的跟踪控制方法,还包括:
32、对间隙内电机与负载之间的相对位置进行初始化;
33、根据所述电机的运行方向和所述双惯量模型中的背隙值,对所述双惯量模型中电机与负载的位置差进行补偿。
34、可选地,所述根据所述电机的运行方向和所述双惯量模型中的背隙值,对所述双惯量模型中电机与负载的位置差进行补偿的步骤包括:
35、当所述运行方向为第一方向时,将所述位置差和所述背隙值的一半进行相加,以对所述双惯量模型中电机与负载的位置差进行补偿;
36、当所述运行方向为第二方向时,将所述位置差和所述背隙值的一半进行相减,以对所述双惯量模型中电机与负载的位置差进行补偿。
37、此外,为实现上述目的,本技术还提供了一种含背隙的双惯量模型的跟踪控制装置,包括:
38、模型建立模块,用于建立含背隙的双惯量模型,并基于所述双惯量模型建立模型跟踪控制器;
39、参数调整模块,用于调整所述模型跟踪控制器中各个环路的控制参数,直到所述模型跟踪控制器达到稳定状态;
40、电机控制参数确定模块,用于确定达到稳定状态时对应的电机控制参数;
41、伺服系统控制模块,用于基于所述电机控制参数对实际伺服系统进行控制,使所述实际伺服系统达到稳定运行状态。
42、此外,为实现上述目的,本技术还提供了一种仿真设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的含背隙的双惯量模型的跟踪控制程序,所述含背隙的双惯量模型的跟踪控制程序被所述处理器执行时实现上述的含背隙的双惯量模型的跟踪控制方法的步骤。
43、此外,为实现上述目的,本技术还提供了一种计算机可读存储介质,其上存储有含背隙的双惯量模型的跟踪控制程序,所述含背隙的双惯量模型的跟踪控制程序被处理器执行时实现上述的含背隙的双惯量模型的跟踪控制方法的步骤。
44、本技术实施例中提供的一种双惯量模型的跟踪控制方法、装置、设备及存储介质的技术方案,本技术考虑了电机与负载之间的背隙,建立含背隙的双惯量模型,并基于所述双惯量模型建立模型跟踪控制器;进而调整所述模型跟踪控制器中各个环路的控制参数,直到所述模型跟踪控制器达到稳定状态;最后确定达到稳定状态时对应的电机控制参数,以基于所述电机控制参数对实际伺服系统进行控制,使所述实际伺服系统达到稳定运行状态。由于考虑了伺服系统中的弹性环节和间隙,使用双惯量模型对伺服系统进行建模,并基于该模型对伺服系统进行模型跟踪控制,以此可以抑制系统的振动,提高快速定位能力。
- 还没有人留言评论。精彩留言会获得点赞!