一种基于视觉定位的零部件移载及组装装置的制作方法
1.本实用新型涉及自动化组装技术领域,尤其涉及一种基于视觉定位的零部件移载及组装装置。
背景技术:
2.在自动化电子产品零件组装技术领域中,经常需要将一些零件放置于对应的组装壳内,如带有针脚的pcb板在组装时,需要将pcb板翻转,使带有针脚的一面朝上,然后在放置于组装壳内,而现有的对其组装依然采用人工组装的方式,人工拿取pcb板,并手动将其放置于对应的组装壳内,组装效率低,且需占用较多的人力资源,组装成本高,经济效益低。
技术实现要素:
3.本实用新型的目的是提供一种基于视觉定位的零部件移载及组装装置,该装置基于第一定位相机和第二定位相机可分别对零部件、组装盒进行定位,进而经零件移载机构将零部件自动移载放置于对应的组装盒内,进而实现零部件的自动化组装,自动化程度高、组装效率高,且可节省人力资源,进而降低成本,同时,在夹紧片的一侧下部还设有呈锯齿状的防滑条纹,可增加对零部件夹持的夹持力,进而保证零部件移载的稳定性,且整体设计合理、使用方便,适用于多种需要自动化组装零部件的技术领域中,泛用性强。
4.为实现上述目的,采用以下技术方案:
5.一种基于视觉定位的零部件移载及组装装置,包括零件移载机构、布置于零件移载机构下方的第一定位相机、布置于零件移载机构一侧的透明玻璃板,以及分别位于透明玻璃板上方和下方的背光源、第二定位相机;所述透明玻璃板用于承载外部放置于其上的组装盒,第二定位相机用于对放置于透明玻璃板上的组装盒拍照以获取组装盒位置信息;所述第一定位相机用于对零件移载机构移载的零部件拍照以获取零部件位置信息,零件移载机构用于依据获取的组装盒位置信息和零部件位置信息,将零部件移载放置于对应的组装盒内。
6.进一步地,所述零件移载机构包括x轴平移机构、与x轴平移机构连接的y轴平移机构、与y轴平移机构连接的z轴升降机构,以及与z轴升降机构连接的r轴旋转机构;所述r轴旋转机构上还安装有夹爪模组。
7.进一步地,所述夹爪模组包括安装于r轴旋转机构上的夹爪气缸,以及与夹爪气缸连接的两夹紧片;所述夹爪气缸用于驱动两夹紧片相互靠近或远离,以夹取或释放零部件。
8.进一步地,两所述夹紧片的相对一侧的下部还开设有若干防滑条纹。
9.进一步地,所述x轴平移机构包括x轴安装座、安装于x轴安装座上的x轴丝杆模组和x轴滑轨模组,以及用于驱动x轴丝杆模组运转的x轴电机。
10.进一步地,所述y轴平移机构包括布置于x轴滑轨模组上并与x轴丝杆模组连接的y轴安装座、安装于y轴安装座上的y轴丝杆模组和y轴滑轨模组,以及用于驱动y轴丝杆模组运转的y轴电机。
11.进一步地,所述z轴升降机构包括布置于y轴滑轨模组上并与y轴丝杆模组连接的第一滑动板、与第一滑动板一端连接的升降安装板、安装于升降安装板上的z轴丝杆模组,以及用于驱动z轴丝杆模组运转的z轴电机。
12.进一步地,所述r轴旋转机构包括与z轴丝杆模组连接的r轴安装座,以及安装于r轴安装座上的旋转电机。
13.采用上述方案,本实用新型的有益效果是:
14.该装置基于第一定位相机和第二定位相机可分别对零部件、组装盒进行定位,进而经零件移载机构将零部件自动移载放置于对应的组装盒内,进而实现零部件的自动化组装,自动化程度高、组装效率高,且可节省人力资源,进而降低成本,同时,在夹紧片的一侧下部还设有呈锯齿状的防滑条纹,可增加对零部件夹持的夹持力,进而保证零部件移载的稳定性,且整体设计合理、使用方便,适用于多种需要自动化组装零部件的技术领域中,泛用性强。
附图说明
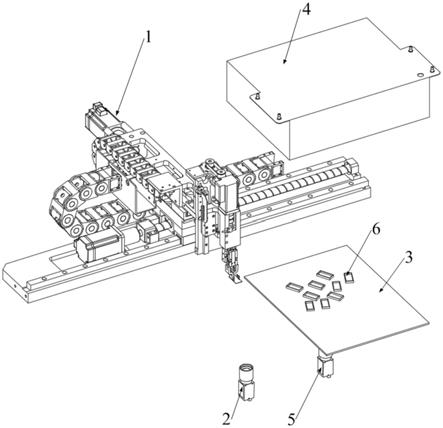
15.图1为本实用新型的立体图;
16.图2为本实用新型的零件移载机构的立体图;
17.图3为图2的a处局部放大示意图;
18.其中,附图标识说明:
19.1—零件移载机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—第一定位相机;
20.3—透明玻璃板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4—背光源;
21.5—第二定位相机;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6—组装盒;
22.11—x轴平移机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12—y轴平移机构;
23.13—z轴升降机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14—r轴旋转机构;
24.15—夹爪模组;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
151—夹爪气缸;
25.152—夹紧片;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
153—防滑条纹。
具体实施方式
26.以下结合附图和具体实施例,对本实用新型进行详细说明。
27.参照图1至3所示,本实用新型提供一种基于视觉定位的零部件移载及组装装置,包括零件移载机构1、布置于零件移载机构1下方的第一定位相机2、布置于零件移载机构1一侧的透明玻璃板3,以及分别位于透明玻璃板3上方和下方的背光源4、第二定位相机5;所述透明玻璃板3用于承载外部放置于其上的组装盒6,第二定位相机5用于对放置于透明玻璃板3上的组装盒6拍照以获取组装盒6位置信息;所述第一定位相机2用于对零件移载机构1移载的零部件拍照以获取零部件位置信息,零件移载机构1用于依据获取的组装盒6位置信息和零部件位置信息,将零部件移载放置于对应的组装盒6内。
28.继续参照图1至3所示,本实施例中,零件移载机构1支持四轴运动,即x轴、y轴、z轴平移运动以及r轴旋转运动,进而可对零部件的放置角度、放置位置等信息进行自适应调节,将便将其放置于对应的组装盒6内,简单高效;该实施例中,可首先人工或经外部的移载机构将若干组装盒6放置于透明玻璃板3上,第二定位相机5可对透明玻璃板3上的组装盒6
拍照获取组装盒6位置信息并传至后台,随后,零件移载机构1将移载的零部件移载至第一定位相机2的上方,第一定位相机2对其进行拍照以获取零部件位置信息并传至后台,后台依据获取的组装盒6位置信息和零部件位置信息,控制零件移载机构1调整零部件放置角度、放置位置等信息,使得其与组装盒6的位置信息对应,最后,将其放置于对应的组装盒6内,即可实现零部件的自动化组装,自动化程度高、组装效率高,且可节省人力资源,进而降低成本。
29.优选地,所述零件移载机构1包括x轴平移机构11、与x轴平移机构11连接的y轴平移机构12、与y轴平移机构12连接的z轴升降机构13,以及与z轴升降机构13连接的r轴旋转机构14;所述r轴旋转机构14上还安装有夹爪模组15。
30.优选地,所述夹爪模组15包括安装于r轴旋转机构14上的夹爪气缸151,以及与夹爪气缸151连接的两夹紧片152;所述夹爪气缸151用于驱动两夹紧片152相互靠近或远离,以夹取或释放零部件。
31.优选地,两所述夹紧片152的相对一侧的下部还开设有若干防滑条纹153。在夹紧片152的一侧下部还设有防滑条纹153(呈锯齿状),可增加对零部件夹持的夹持力,进而保证零部件移载的稳定性。
32.优选地,所述x轴平移机构11包括x轴安装座、安装于x轴安装座上的x轴丝杆模组和x轴滑轨模组,以及用于驱动x轴丝杆模组运转的x轴电机;所述y轴平移机构12包括布置于x轴滑轨模组上并与x轴丝杆模组连接的y轴安装座、安装于y轴安装座上的y轴丝杆模组和y轴滑轨模组,以及用于驱动y轴丝杆模组运转的y轴电机;所述z轴升降机构13包括布置于y轴滑轨模组上并与y轴丝杆模组连接的第一滑动板、与第一滑动板一端连接的升降安装板、安装于升降安装板上的z轴丝杆模组,以及用于驱动z轴丝杆模组运转的z轴电机;所述r轴旋转机构14包括与z轴丝杆模组连接的r轴安装座,以及安装于r轴安装座上的旋转电机。
33.以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1