一种电石炉电极控制方法与流程
1.本发明涉及电石生产设备技术领域,特别涉及一种电石炉电极控制方法。
背景技术:
2.电石(工业碳化钙)生产过程是将生石灰和碳素物料在电石炉内部高温的作用下发生熔 融反应后冷却结晶得到电石,该过程热损失严重,能耗巨大,电石生产中电极电流是保证电 石单吨能耗和质量的关键被控变量,电极电流的波动直接影响了电石产品的质量和生产能耗, 电极电流的大范围波动过大会影响电网供电质量、降低设备使用寿命。
3.实际生产过程是通过调节电极在原料中的深度和电极变压器的档位,来保持电流和电弧 的相对稳定,但是现有的电极升降调节需要人工进行检测与控制,控制误差大并且可靠性低, 不利于电极电流的稳定调节,降低电石生产效率。
技术实现要素:
4.本发明的目的在于提供一种电石炉电极控制方法,解决电石炉电极位置控制不精准的问 题。
5.本发明的技术问题解决方案:
6.一种电石炉电极控制方法,其特征在于,包括以下步骤:
7.s1、计算单个电极产生的电弧长度;
8.s2、根据电弧长度与电弧电导率计算电极实际电流;
9.s3、根据电极实际电流与电机设定电流之间的电极电流偏差,当电极电流偏差大于第一 偏差值时执行步骤s4,当电极电流偏差小于第一偏差值并大于第二偏差值时执行步骤s5,当 电极电流偏差小于第二偏差值时执行步骤s6;
10.s4、通过模糊自校正控制电极升降时间;
11.s5、通过电极点动控制控制电极升降时间;
12.s6、电极升降时间保持不变。
13.进一步限定,所述步骤s1包括以下步骤:
14.s11、根据采样频率采集电极升降时间u(k)与电极位置h(k),建立电机位置的数学模型:
[0015][0016]
其中,k0为比例系数,τ为惯性时间系数,k为第k次采样,h(k-1)为上一次采样时电极 位置,h(k)为当前时刻电极位置,u(k)为当前采样时电极升降时间,u(k-1)为上一次采样时电 极升降时间;
[0017]
s12、根据电极位置计算得到电极电弧长度l(k):
[0018]
l(k)=h(k)-hm(
·
)
[0019]
其中,hm(
·
)为电石炉内熔池液面高度函数。
[0020]
进一步限定,所述步骤s2为:
[0021]
根据电弧长度l(k)与电弧电导率σ计算当前时刻电极实际电流值y(k):
[0022][0023][0024]
其中,n为电弧电导,s为电弧横截面积,l为电弧长度,σ0(
·
)与υ(
·
)为常数,u(
·
)为当 前时刻的二次侧电压值,r(k)为干扰参数。
[0025]
进一步限定,所述步骤s3包括以下步骤:
[0026]
s31、根据计算得到的电极实际电流y(k)与电极设定电流y
sp
(k)计算电极电流偏差e(k):
[0027]
|y
sp
(k)-y(k)|=|e(k)|
[0028]
s32、判断电极电流偏差e(k)大小;
[0029]
当电极电流偏差大于第一偏差值β,即|e(k)|>β,则执行步骤s4;
[0030]
当电极电流偏差不大于第一偏差值β并大于第二偏差值α,即α《|e(k)|≤β,则执行步骤 s5;
[0031]
当电极电流偏差不大于第二偏差值α,即|e(k)|≤α,则执行步骤s6;
[0032]
其中0《α《β。
[0033]
进一步限定,所述步骤s4为:
[0034]
通过模糊自校正控制电极升降时间u1(k):
[0035]
u1(k)=u1(k-1)+k
p
[e(k)-e(k-1)]+kie(k)
[0036]
其中,e(k)=y
sp
(k)-y(k),k
p
为比例增益,ki为积分增益;
[0037][0038][0039]
为k
p
的初始值,为ki的初始值,δk
p
为电极电流偏差e(k)的论域,δki为电极电流偏 差变化率δe(k)的论域。
[0040]
进一步限定,所述步骤s5为:
[0041]
利用时间误差积分值计算电极升降控制时间u2(k):
[0042][0043][0044]
其中,η为点动控制限定值,kc为点动控制器参数。
[0045]
本发明的有益效果在于:
[0046]
本发明根据电极电流偏差的大小执行不同的电极升降控制方式,使得电极升降控制满足 使用要求,根据实际情况进行电极位置调整,电极升降控制更加稳定合理,同时电
极升降控 制更加精准,避免了电极频繁反复调节,电极升降控制更加安全可靠。
附图说明
[0047]
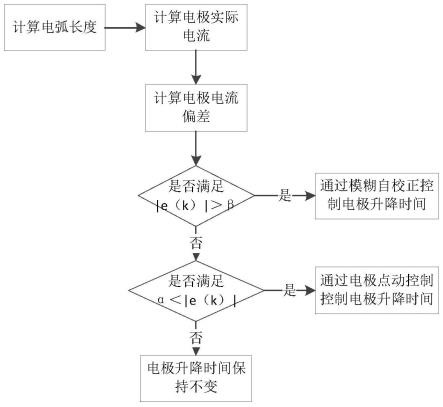
图1为本发明方法流程示意图;
[0048]
图2为模糊推理过程示意图;
[0049]
图3为电极电流在不同电流值区间进行对应电极控制示意图。
具体实施方式
[0050]
通常在生产过程中,利用电极与熔池液面高度保持恒定距离即可使得电极产生的电弧长 度相同,进而使得电极的电流稳定保持恒定大小,但是在生产时熔池液面高度会因成品排出 量与物料添加量不同步而产生不规则变化,所以就会导致电极与熔池液面之间的间距改变, 此时通常会通过升降大力缸的中电磁阀通断时间来控制电极升降时间u(k),在电极反复微小 上升量或者下降量的调整下使电极电流大小保持相对稳定。
[0051]
参考图1,本实施例提供一种电石炉电极控制方法,包括以下步骤:
[0052]
s1、计算单个电极产生的电弧长度;
[0053]
s2、根据电弧长度与电弧电导率计算电极实际电流;
[0054]
s3、根据电极实际电流与电机设定电流之间的电极电流偏差,当电极电流偏差大于第一 偏差值时执行步骤s4,当电极电流偏差小于第一偏差值并大于第二偏差值时执行步骤s5,当 电极电流偏差小于第二偏差值时执行步骤s6;
[0055]
s4、通过模糊自校正控制电极升降时间;
[0056]
s5、通过电极点动控制控制电极升降时间;
[0057]
s6、电极升降时间保持不变。
[0058]
具体的,升降大力缸对电极升降的控制实现对应的电极位置h(k)的控制,通过电极位置 能够获得电弧长度,进而通过电弧长度l(k)即可获得电极电流值y(k)。
[0059]
优选的,步骤s1包括以下步骤:
[0060]
s11、根据采样频率采集电极升降时间u(k)与电极位置h(k),建立电机位置的数学模型:
[0061][0062]
其中,k0为比例系数,τ为惯性时间系数,k为第k次采样,h(k-1)为上一次采样时电极 位置,h(k)为当前时刻电极位置,u(k)为当前采样时电极升降时间,u(k-1)为上一次采样时电 极升降时间;
[0063]
s12、根据电极位置计算得到电极电弧长度l(k):
[0064]
l(k)=h(k)-hm(
·
)
[0065]
其中,hm(
·
)为电石炉内熔池液面高度函数。
[0066]
优选的,步骤s2为:
[0067]
根据电弧长度l(k)与电弧电导率σ计算当前时刻电极实际电流值y(k):
[0068]
[0069][0070]
其中,n为电弧电导,s为电弧横截面积,l为电弧长度,σ0(
·
)与υ(
·
)为常数,u(
·
)为当 前时刻的二次侧电压值,r(k)为干扰参数,并且设定电石炉内气体压力为常数,定压比热容也 为常数。
[0071]
优选的,步骤s3包括以下步骤:
[0072]
s31、根据计算得到的电极实际电流y(k)与电极设定电流y
sp
(k)计算电极电流偏差e(k):
[0073]
|y
sp
(k)-y(k)|=|e(k)|
[0074]
s32、判断电极电流偏差e(k)大小;
[0075]
当电极电流偏差大于第一偏差值β,即|e(k)|>β,则执行步骤s4;
[0076]
当电极电流偏差不大于第一偏差值β并大于第二偏差值α,即α《|e(k)|≤β,则执行步骤 s5;
[0077]
当电极电流偏差不大于第二偏差值α,即|e(k)|≤α,则执行步骤s6;
[0078]
其中0《α《β。
[0079]
电极电流偏差e(k)=y
sp
(k)-y(k),在对电极电流偏差进行大小比较时选取绝对值大小 比较,故选为|y
sp
(k)-y(k)|=|e(k)|;
[0080]
在使用时,α取值可选为2.0、β的取值可选为10.0。
[0081]
优选的,所述步骤s4为:
[0082]
通过模糊自校正控制电极升降时间u1(k):
[0083]
u1(k)=u1(k-1)+k
p
[e(k)-e(k-1)]+kie(k)
[0084]
其中,e(k)=y
sp
(k)-y(k),k
p
为比例增益,ki为积分增益;
[0085][0086][0087]
为k
p
的初始值,为ki的初始值,δk
p
为电极电流偏差e(k)的论域,δki为电极电流偏 差变化率δe(k)的论域。
[0088]
具体的,由于电石炉电极实际电流y(k)受到原料变化、炉况变化、加料未知变化频繁干 扰和不确定性,采用基于常规控制器难以保证控制性能,加上干扰的影响,导致y(k)出现大 的波动,使得电极设定电流y
sp
与电极实际电流y(k)的电极电流偏差e(k)及电极电流偏差变化 率δe(k)产生较大的波动,所以需要通过自校正pi控制器进行电极升降时间的控制,当 |e(k)|>β时,切换至自校正pi控制器对电极升降进行控制。
[0089]kp
为自校正pi控制器的比例增益,ki为自校正pi控制器的积分增益,求得k
p
的初始值 ki的初始值
[0090]
[0091][0092]
其中,延迟时间tu和平衡时间tg由单位阶跃响应实验确定。
[0093]
e(k)和δe(k)的模糊化处理:
[0094]
将电极电流偏差e(k)和偏差变化率δe(k)论域内的某一个确定的数,确定e(k)和δe(k)的量 化因子分别为ke和k
δe
,以及模糊子集的数量为m,则自校正pi控制器的输入为:
[0095]
e(k)=《ke·
e(k)》
[0096]
δe(k)=《k
δe
·
δe(k)》
[0097]
式中《
·
》表示四舍五入取整运算;
[0098]
采用三角型隶属度函数
[11]
来进行模糊化得到e和δe,为很低(nb)、较低(nm)、低(ns)、 正常(zo)、高(ps)、较高(pm)、很高(pb)7个模糊集合。7个模糊值得到隶属度函数为中心对 称三角函数。
[0099]
模糊推理:
[0100]
选择输出模糊变量为δk
p
和δki采用单值型隶属度函数,其变量值也取很低、较低、低、 正常、高、较高、很高7个模糊值,建立模糊规则如表1所示;
[0101]
表1δk
p
/δki的模糊规则表
[0102][0103]
模糊化运算:
[0104]
在模糊逻辑运算中,通常选择“与”模糊算子,则即为该条模糊结论部分的激活水平。如图2所示的模糊推理过程,δk
p
、δki的nb隶属度函 数则被设置为该激活水平μ
nb
(δk
p
)、μ
nb
(δki)。
[0105]
设δk
p
的论域为(δk
p-,δk
p+
),δki的论域为(δk
i-,δk
i+
),只要计算模糊子集所对应的输出 模糊集的隶属度μ(δk
p
(i))和μ(δki(i))(i=1,2,3,4,5,6),即可得到清晰解,可采用重心法得到模 糊控制的清晰解δk
p/i
:,进而确定电极电流偏差e(k)的论域和电极电流偏差变化率δe(k)的 论域:
[0106][0107]
式中,μ(δk
p/i
(i))是第i条规则输出模糊集的隶属度,δk
p/i
(i)为第i条规则结论部分隶属度 函数的特征值。
[0108]
优选的,步骤s5为:
[0109]
利用时间误差积分值计算电极升降控制时间u2(k):
[0110][0111][0112]
其中,η为点动控制限定值,kc为点动控制器参数。
[0113]
为了防止电石炉电极电流大范围动作,提高控制精度,当跟电极电流偏差e(k)处于一定 范围时,利用一定时间的误差积分值,当积分值到达一定限定值η时,进行一次动作,即: 点动控制电极升降时间u2(k):
[0114][0115][0116]
式中,kc为智能控制器参数,η为智能控制限定值。
[0117]
参考图3,根据电极电流的动态特性,将其划分为电流控制五个区间。其中,电流超过 上偏差与下偏差时,即在电极电流位于c
+
或c-区间时,切换为自校正pi控制器控制;电极 电流超过小上偏差与小下偏差时,即电极电流在b
+
或b-区间时,切换为点动控制;电流变化 处于a区间时,电极升降时间保持不变,即:
[0118]
u(k)=u1(k)|e(k)|>β
[0119]
u(k)=u2(k)α<|e(k)|≤β
[0120]
u(k)=u(k-1)|e(k)|≤α
[0121]
为了防止电级升降时间小范围频繁波动,对其切换控制的电极升降时间间隙δu(k)与电极 升降时间增量阈值x进行判断决定是否改变u(k),即:
[0122]
u(k)=u(k-1)+δu(k)|δu(k)|>x
[0123]
u(k)=u(k-1)|δu(k)|≤x
[0124]
电极升降时间增量阈值x在使用时可选为1.0,k
p
=1.0、ki=0.87,δk
p
论域为[-1.0,1.0]、δki论域为[-0.05,0.05],kc=1.0;限定值η为:η=30.0。
[0125]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人 员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施 方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所 列项目的任意的和所有的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1