一种高效高精度吸取贴合装置的制作方法
一种高效高精度吸取贴合装置
【技术领域】
1.本实用新型属于贴合技术领域,特别是涉及一种高效高精度吸取贴合装置。
背景技术:
2.目前有一款产品在组装过程中,需要在其上贴装一片薄片线路板,然后在通过焊锡焊接固定。由于薄片线路板上的连接pin自身的宽度以及与相邻pin之间的间隙非常小,因此,对于薄片线路板的贴装要求非常高。由于该产品的生产采用的是流水线方式,为了满足线体的uph,需要一次性吸取多个薄片线路板进行同步的贴合。之前,本公司对于该薄片线路板的取料贴合机构如图1所示,其采用升降电机1’驱动支撑板2’上下活动,然后在支撑板2’上设置多个升降气缸3’,在升降气缸3’的活动末端设置吸附组件4’,通过多个吸附组件4’同时吸附多个料件,然统一移动至贴合位置上方,然后支撑板2’再下降至设定高度,最后有升降气缸3’驱动吸附组件4’下降将料件贴合在贴装位置。该机构存在以下缺点:1)利用气缸实现吸附组件上下伸缩,精度交底;2)竖直方向上仅能依靠硬限位实现,难以实现多工位的等高;3)多个吸附组件设置在同一个支撑板上,难以调节到每个料件位置精准,系统编程困难以及补偿耗时长;4)贴合过程的压力大小无法监控,存在压块产品的风险。
3.现有技术中也有专利公开号为cn209142575u公开了一种贴装装置,其采用电机配合同步带实现上下运动,然后设置电机驱动转轴旋转实现旋转调节,但该结构整体前后空间占用大,多个单元组合在一起后结构冗杂;且同步带传动容易出现跳动,并不适用于高精密的贴装场景。
4.因此,有必要提供一种新的高效高精度吸取贴合装置来解决上述问题。
技术实现要素:
5.本实用新型的主要目的在于提供一种高效高精度吸取贴合装置,能够实现多个薄片料件的同步高精度、高稳定性以及高效的贴合,满足高节拍流水线生产需求,且结构紧凑空间占用小。
6.本实用新型通过如下技术方案实现上述目的:一种高效高精度吸取贴合装置,其包括第一支撑板、设置在所述第一支撑板上的若干吸取贴合单元,所述吸取贴合单元包括第一驱动模组、受所述第一驱动模组驱动进行上下运动的第一安装座、固定在所述第一安装座上的第二驱动模组、受所述第二驱动模组驱动进行旋转运动的旋转块、上下浮动设置在所述旋转块上的调平模组、检测所述调平模组所受压力大小的压力传感器、设置在所述调平模组下方的第一安装块、上下浮动设置在所述第一安装块上的第二安装块、设置在所述第二安装块上的一对吸嘴以及连接所述第一安装块与所述第二安装块的弹性件。
7.进一步的,所述第一驱动模组包括驱动件、受所述驱动件驱动进行旋转传动的滚珠丝杆,所述第一安装座与所述滚珠丝杆的滚珠轴套固定连接。
8.进一步的,所述第二驱动模组包括电机与减速机,所述旋转块通过精密轴承旋转设置在所述第一安装座上。
9.进一步的,所述第一安装块上还设置有吸附块。
10.进一步的,所述第一安装块上设置有限定所述第二安装块上下运动的限位槽,所述第二安装块上设置有伸入到所述限位槽内的挡板。
11.进一步的,所述旋转块具有一个第二竖直表面,所述第二竖直表面上设置有第二滑轨,所述调平模组上设置有第三安装块,所述第三安装块通过滑块上下滑动设置在所述第二滑轨上。
12.进一步的,所述旋转块还固定设置有安装环,所述安装环上设置有感应片,所述第一安装座上设置有检测所述感应片信号的传感器。
13.进一步的,所述调平模组包括固定在所述第三安装块底部的第二支撑板、通过四根连接杆设置在所述第二支撑板下方的第三支撑板、位于所述第二支撑板与所述第三支撑板之间且保持两者间距的滚珠、位于所述第二支撑板与所述第三支撑板且套设在所述连接杆上的蝶形调节弹簧;所述第一安装块固定在所述第三支撑板下方。
14.与现有技术相比,本实用新型一种高效高精度吸取贴合装置的有益效果在于:通过设置多个独立的吸取贴合单元,能够实现多个薄片料件的同步贴合,且每个料件的旋转、升降运动独立控制,能够有效的保障每个料件贴合时的精度,实现高精度、高稳定性以及高效的自动贴合,满足高节拍流水线生产需求;通过旋转驱动模组还可以实现料件的水平角度调整,以正确的姿态贴合在准确的位置上;每个吸取贴合单元中,配置压力传感器实时监测贴合压力,利用精密轴承与减速机降低吸嘴上下运动的圆跳动,配合上下弹性浮动结构降低吸嘴悬臂端的摆动,保障料件贴合位置精准,提高了贴合质量。
【附图说明】
15.图1为现有技术中吸取贴合机构的结构示意图;
16.图2为本实用新型实施例的结构示意图;
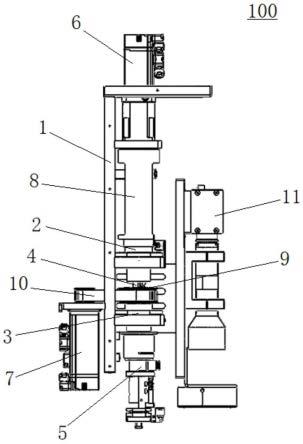
17.图3为本实用新型实施例中吸取贴合单元的侧视结构示意图;
18.图4为本实用新型实施例中吸取贴合单元的部分结构示意图之一;
19.图5为本实用新型实施例中吸取贴合单元的部分结构示意图之二;
20.图6为本实用新型实施例中吸取贴合单元的部分结构示意图之三;
21.图中数字表示:
22.100-高效高精度吸取贴合装置;
23.1-第一支撑板;2-吸取贴合单元,21-第一驱动模组,22-第一安装座,221-传感器,23-第二驱动模组,231-电机,232-减速机,24-旋转块,241-第二滑轨,242-安装环,243-感应片,25-调平模组,251-第三安装块,252-滑块,253-第二支撑板,254-第三支撑板,255-蝶形调节弹簧,26-压力传感器,27-第一安装块,271-限位槽,272-第一滑轨,28-第二安装块,281-挡板,29-吸嘴,210-弹性件,211-驱动件,212-滚珠丝杆,213-吸附块;
24.101-线路板。
【具体实施方式】
25.实施例一:
26.请参照图2-图6,本实施例为一种高效高精度吸取贴合装置100,其包括第一支撑
板1、设置在第一支撑板1上的若干吸取贴合单元2。
27.多个吸取贴合单元2可同时吸取多个薄片料件并同步进行贴合,以满足高节拍的产线生产需求。
28.吸取贴合单元2包括第一驱动模组21、受第一驱动模组21驱动进行上下运动的第一安装座22、固定在第一安装座22上的第二驱动模组23、受第二驱动模组23驱动进行旋转运动的旋转块24、上下浮动设置在旋转块24上的调平模组25、检测调平模组25所受压力大小的压力传感器26、设置在调平模组25下方的第一安装块27、上下浮动设置在第一安装块27上的第二安装块28、设置在第二安装块28上的一对吸嘴29、连接第一安装块27与第二安装块28的弹性件210。
29.通过设置压力传感器26实时监测贴合薄片料件过程中的压力大小,有效防止贴合力度过大而损坏产品。通过第二驱动模组23驱动旋转块24旋转,进而调节吸嘴29吸附薄片料件进行摆动,实现薄片料件的角度调整,以实现精准位置的贴合。利用调平模组25可以调节两个吸嘴29形成的吸附面的平面度,以保障吸附薄片料件后料件底部平面的平面度,进而为实现高精度的贴合奠定基础。最后吸嘴29采用上下弹性浮动的形式,一方面在贴合时可以对料件进行预压,降低吸嘴29悬臂的摆动;另一方面实现了料件表面与贴合表面的软接触,有效避免了硬性碰撞存在的损坏产品的风险。
30.第一驱动模组21包括驱动件211、受驱动件211驱动进行旋转传动的滚珠丝杆212,第一安装座22与滚珠丝杆212的滚珠轴套固定连接。
31.第二驱动模组23包括电机231与减速机232,旋转块24通过精密轴承旋转设置在第一安装座22上。第二驱动模组23辅以减速机控制转动速度与惯量,用精密轴承降低取料吸嘴29的圆跳动,配合吸嘴29的上下弹性浮动降低吸嘴29悬臂端的摆动,进而保障料件在贴合时的精度。
32.安装块27上还设置有吸附块213,吸附块213位于吸嘴29的一旁,主要用于吸附料件上用于焊接的连接区域,保障连接pin精准对接。
33.本实施例中的薄片料件可以是排线或柔性线路板。
34.第一安装块27上设置有限定第二安装块28上下运动的限位槽271,第二安装块28上设置有伸入到限位槽271内的挡板281。通过限位槽271与挡板281的配合实现对吸嘴29上下浮动范围的限定。第一安装块27具有一个第一竖直表面,所述第一竖直表面上设置有第一滑轨272,第二安装块28滑动设置在第一滑轨272上。
35.旋转块24具有一个第二竖直表面,所述第二竖直表面上设置有第二滑轨241,调平模组25上设置有第三安装块251,第三安装块251通过滑块252上下滑动设置在第二滑轨241上。旋转块24还固定设置有安装环242,安装环242上设置有感应片243,第一安装座22上设置有检测感应片243信号的传感器221。
36.调平模组25包括固定在第三安装块251底部的第二支撑板253、通过四根连接杆设置在第二支撑板253下方的第三支撑板254、位于第二支撑板253与第三支撑板254之间且保持两者间距的滚珠(图中未标示)、位于第二支撑板253与第三支撑板254且套设在所述连接杆上的蝶形调节弹簧255。第一安装块27固定在第三支撑板254下方。通过调节四个蝶形调节弹簧255可以调节第三支撑板254底部平面的平面度,进而保障吸嘴29吸附面的平面度。
37.本实施例中,第一驱动模组21与第二驱动模组23的驱动轴向后投影后共线,吸取
贴合单元2的整体宽度与第一、第二驱动模组的宽度相当,大大缩小了多个吸取贴合单元2排列后的整体空间占用,且在前后方向上,第一驱动模组21的后侧表面与第二驱动模组23的前侧表面间隙非常小,因此,使得吸取贴合单元2在前后方向上的空间占用也非常小,具有结构紧凑空间占用小的优点。
38.以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1