一种车牌灯光的调节方法、装置和电子设备与流程
本技术涉及计算机,具体而言,涉及一种车牌灯光的调节方法、装置、介质和电子设备。
背景技术:
1、目前在重要路口会设置车牌识别系统,通过车牌识别系统的抓拍设备对过往车辆的车牌进行补光,保证车牌识别系统能够对车牌进行识别。
2、但是,抓拍设备的亮度远远超过了人眼所能接收的范围,补光时所产生散射,扩大了照射范围,强烈刺激补光方向上后方车辆驾驶员的双眼,易使后方驾驶员的双眼形成短暂致盲,导致驾驶危险发生。
3、因此,本技术提供了一种车牌灯光的调节方法,以解决上述技术问题。
技术实现思路
1、本技术的目的在于提供一种车牌灯光的调节方法、装置、介质和电子设备,能够解决上述提到的至少一个技术问题。具体方案如下:
2、根据本技术的具体实施方式,第一方面,本技术提供一种车牌灯光的调节方法,包括:
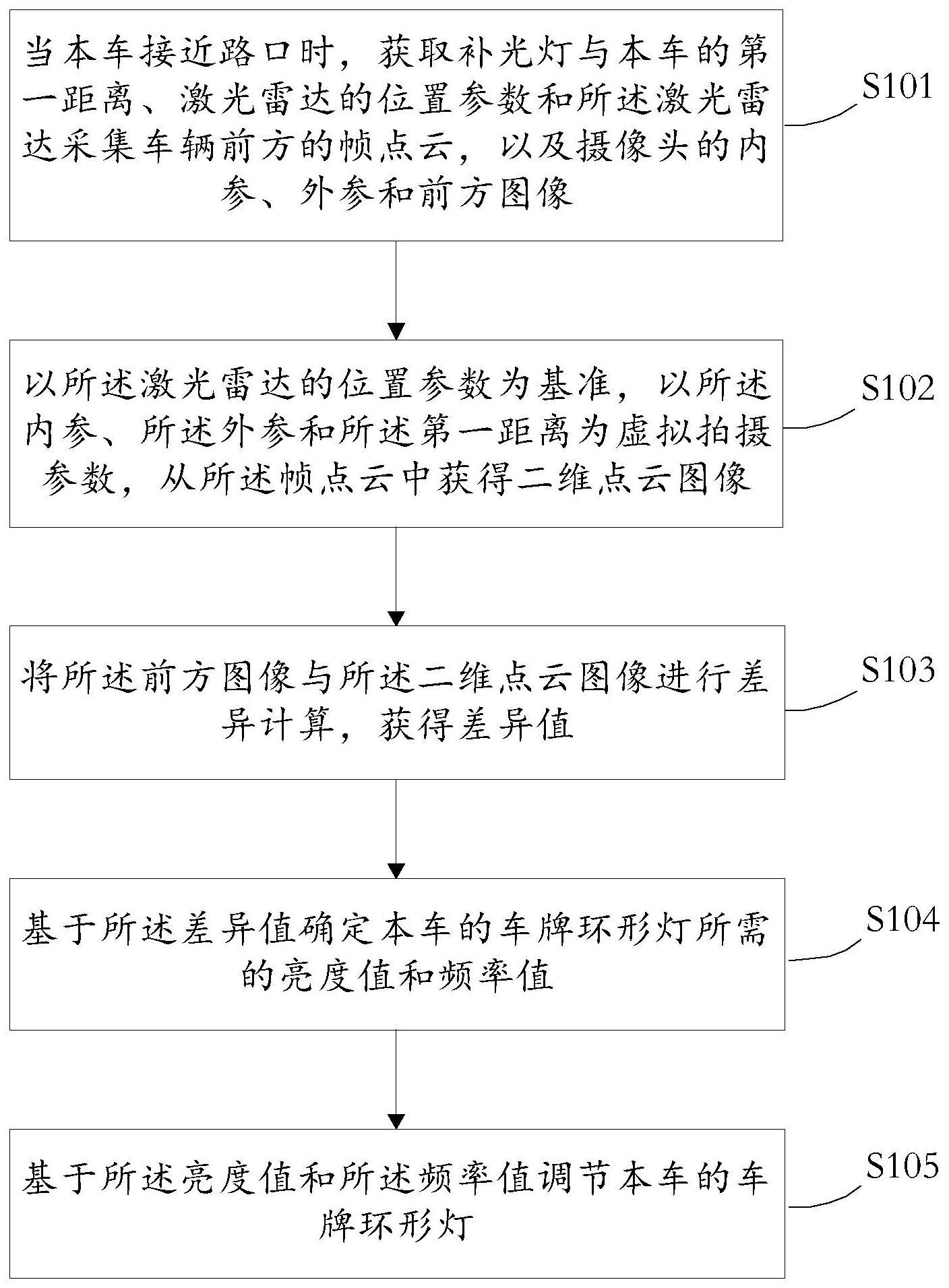
3、当本车接近路口时,获取抓拍设备与本车的第一距离、激光雷达的位置参数和所述激光雷达采集车辆前方的帧点云,以及摄像头的内参、外参和前方图像,其中,所述抓拍设备设置于临近所述路口的上方,用于抓拍违章车辆的车牌;
4、以所述激光雷达的位置参数为基准,以所述内参、所述外参和所述第一距离为虚拟拍摄参数,从所述帧点云中获得二维点云图像;
5、将所述前方图像与所述二维点云图像进行差异计算,获得差异值;
6、基于所述差异值确定本车的车牌环形灯所需的亮度值和频率值;
7、基于所述亮度值和所述频率值调节本车的车牌环形灯。
8、可见的,所述将所述前方图像与所述二维点云图像进行差异计算,获得差异值,包括:
9、获取所述前方图像的亮度值、对比度值和结构值,以及所述二维点云图像的亮度值和对比度值;
10、基于所述前方图像的亮度值与所述二维点云图像的亮度值获得亮度差异值;
11、基于所述前方图像的对比度值与所述二维点云图像的对比度值获得对比度差异值;
12、基于所述前方图像的亮度值和对比度值与所述二维点云图像的亮度值和对比度值获得结构差异值;
13、基于所述亮度差异值、所述对比度差异值和所述结构差异值获得所述前方图像与所述二维点云图像的差异值。
14、可见的,所述获取所述前方图像的亮度值、对比度值和结构值,以及所述二维点云图像的亮度值和对比度值,包括:
15、基于所述前方图像获取前方灰度图像,以及基于所述二维点云图像获取二维灰度图像;
16、基于所述前方灰度图像中每个像素的灰度值获得第一平均灰度值表征所述前方图像的亮度值,以及
17、基于所述二维灰度图像中每个像素的灰度值获得第二平均灰度值表示所述二维点云图像的亮度值;
18、基于所述前方灰度图像的第一平均灰度值、所述前方灰度图像的像素数量以及所述前方灰度图像中每个像素的灰度值获得第一标准差值表征所述前方图像的对比度值,以及
19、基于所述二维灰度图像的第二平均灰度值、所述二维灰度图像的像素数量以及所述二维灰度图像中每个像素的灰度值获得第二标准差值表征所述二维点云图像的对比度值。
20、可见的,所述基于所述前方灰度图像的第一平均灰度值、所述前方灰度图像的像素数量以及所述前方灰度图像中每个像素的灰度值获得第一标准差值表征所述前方图像的对比度值,以及基于所述二维灰度图像的第二平均灰度值、所述二维灰度图像的像素数量以及所述二维灰度图像中每个像素的灰度值获得第二标准差值表征所述二维点云图像的对比度值,分别包括以下公式:
21、
22、其中,ki表示xi或yi,xi表示所述前方灰度图像的第i个像素的亮度值,yi表示所述二维灰度图像的第i个像素的亮度值,μx表示所述前方灰度图像的第一平均灰度值(即所述前方图像的亮度值),μy表示所述二维灰度图像的第二平均灰度值(即所述二维点云图像的亮度值),n表示所述前方灰度图像的像素数量(等于前方图像的像素数量),σx表示所述第一标准差值(即所述前方图像的对比度值),σy表示所述第二标准差值(即所述二维点云图像的对比度值)。
23、可见的,所述基于所述前方图像的亮度值与所述二维点云图像的亮度值获得亮度差异值,包括以下公式:
24、
25、其中,l(x,y)表示亮度差异值,μx表示所述前方灰度图像的第一平均灰度值(即所述前方图像的亮度值),μy表示所述二维灰度图像的第二平均灰度值(即所述二维点云图像的亮度值),c1表示第一常数。
26、可见的,所述基于所述前方图像的对比度值与所述二维点云图像的对比度值获得对比度差异值,包括以下公式:
27、
28、其中,c(x,y)表示对比度差异值,σx表示所述第一标准差值(即所述前方图像的对比度值),σy表示所述第二标准差值(即所述二维点云图像的对比度值),c2表示第二常数。
29、可见的,所述基于所述前方图像的亮度值和对比度值与所述二维点云图像的亮度值和对比度值获得结构差异值,包括以下公式:
30、
31、
32、其中,s(x,y)表示结构差异值,σxy表示平均归一化值,c3表示第三常数。
33、可见的,所述基于所述亮度差异值、所述对比度差异值和所述结构差异值获得所述前方图像与所述二维点云图像的差异值,包括以下公式:
34、ssim(x,y)=[l(x,y)]α[c(x,y)]β[s(x,y)]γ;
35、其中,α,β,γ分别表示贡献度值。
36、根据本技术的具体实施方式,第二方面,本技术提供一种车牌灯光的调节装置,包括:
37、获取单元,用于当本车接近路口时,获取抓拍设备与本车的第一距离、激光雷达的位置参数和所述激光雷达采集车辆前方的帧点云,以及摄像头的内参、外参和前方图像,其中,所述抓拍设备设置于临近所述路口的上方,用于抓拍违章车辆的车牌;
38、获得单元,用于以所述激光雷达的位置参数为基准,以所述内参、所述外参和所述第一距离为虚拟拍摄参数,从所述帧点云中获得二维点云图像;
39、计算单元,用于将所述前方图像与所述二维点云图像进行差异计算,获得差异值;
40、确定单元,用于基于所述差异值确定本车的车牌环形灯所需的亮度值和频率值;
41、调节单元,用于基于所述亮度值和所述频率值调节本车的车牌环形灯。
42、可见的,所述将所述前方图像与所述二维点云图像进行差异计算,获得差异值,包括:
43、获取所述前方图像的亮度值、对比度值和结构值,以及所述二维点云图像的亮度值和对比度值;
44、基于所述前方图像的亮度值与所述二维点云图像的亮度值获得亮度差异值;
45、基于所述前方图像的对比度值与所述二维点云图像的对比度值获得对比度差异值;
46、基于所述前方图像的亮度值和对比度值与所述二维点云图像的亮度值和对比度值获得结构差异值;
47、基于所述亮度差异值、所述对比度差异值和所述结构差异值获得所述前方图像与所述二维点云图像的差异值。
48、可见的,所述获取所述前方图像的亮度值、对比度值和结构值,以及所述二维点云图像的亮度值和对比度值,包括:
49、基于所述前方图像获取前方灰度图像,以及基于所述二维点云图像获取二维灰度图像;
50、基于所述前方灰度图像中每个像素的灰度值获得第一平均灰度值表征所述前方图像的亮度值,以及
51、基于所述二维灰度图像中每个像素的灰度值获得第二平均灰度值表示所述二维点云图像的亮度值;
52、基于所述前方灰度图像的第一平均灰度值、所述前方灰度图像的像素数量以及所述前方灰度图像中每个像素的灰度值获得第一标准差值表征所述前方图像的对比度值,以及
53、基于所述二维灰度图像的第二平均灰度值、所述二维灰度图像的像素数量以及所述二维灰度图像中每个像素的灰度值获得第二标准差值表征所述二维点云图像的对比度值。
54、可见的,所述基于所述前方灰度图像的第一平均灰度值、所述前方灰度图像的像素数量以及所述前方灰度图像中每个像素的灰度值获得第一标准差值表征所述前方图像的对比度值,以及基于所述二维灰度图像的第二平均灰度值、所述二维灰度图像的像素数量以及所述二维灰度图像中每个像素的灰度值获得第二标准差值表征所述二维点云图像的对比度值,分别包括以下公式:
55、
56、其中,ki表示xi或yi,xi表示所述前方灰度图像的第i个像素的亮度值,yi表示所述二维灰度图像的第i个像素的亮度值,μx表示所述前方灰度图像的第一平均灰度值(即所述前方图像的亮度值),μy表示所述二维灰度图像的第二平均灰度值(即所述二维点云图像的亮度值),n表示所述前方灰度图像的像素数量(等于前方图像的像素数量),σx表示所述第一标准差值(即所述前方图像的对比度值),σy表示所述第二标准差值(即所述二维点云图像的对比度值)。
57、可见的,所述基于所述前方图像的亮度值与所述二维点云图像的亮度值获得亮度差异值,包括以下公式:
58、
59、其中,l(x,y)表示亮度差异值,μx表示所述前方灰度图像的第一平均灰度值(即所述前方图像的亮度值),μy表示所述二维灰度图像的第二平均灰度值(即所述二维点云图像的亮度值),c1表示第一常数。
60、可见的,所述基于所述前方图像的对比度值与所述二维点云图像的对比度值获得对比度差异值,包括以下公式:
61、
62、其中,c(x,y)表示对比度差异值,σx表示所述第一标准差值(即所述前方图像的对比度值),σy表示所述第二标准差值(即所述二维点云图像的对比度值),c2表示第二常数。
63、可见的,所述基于所述前方图像的亮度值和对比度值与所述二维点云图像的亮度值和对比度值获得结构差异值,包括以下公式:
64、
65、
66、其中,s(x,y)表示结构差异值,σxy表示平均归一化值,c3表示第三常数。
67、可见的,所述基于所述亮度差异值、所述对比度差异值和所述结构差异值获得所述前方图像与所述二维点云图像的差异值,包括以下公式:
68、ssim(x,y)=[l(x,y)]α[c(x,y)]β[s(x,y)]γ;
69、其中,α,β,γ分别表示贡献度值。
70、根据本技术的具体实施方式,第三方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上任一项所述车牌灯光的调节方法。
71、根据本技术的具体实施方式,第四方面,本技术提供一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上任一项所述车牌灯光的调节方法。
72、本技术实施例的上述方案与现有技术相比,至少具有以下有益效果:
73、本技术提供了一种车牌灯光的调节方法、装置、介质和电子设备。当本车接近路口时,获取前方图像。以所述激光雷达的位置参数为基准,以所述内参、所述外参和抓拍设备与本车的第一距离为虚拟拍摄参数,从所述帧点云中获得二维点云图像,作为前方图像的标准图像进行差异计算,获得两者的差异值。基于所述差异值确定本车的车牌环形灯所需的亮度值和频率值;基于所述亮度值和所述频率值调节本车的车牌环形灯。从而实现了在路口自动调节车牌环形灯的亮度,提高了路口抓拍设备对车牌的识别度。避免了通过补光灯为抓拍设备补光,导致对驾驶员眼睛的伤害,提高了驾驶安全。
- 还没有人留言评论。精彩留言会获得点赞!