一种夜间汽车智能前照灯控制系统和方法与流程
本发明属于汽车前照灯智能传感器领域,具体涉及到采用多种传感器组合来丰富汽车前照灯车灯功能,同时辅助提升汽车安全驾驶。
背景技术:
1、随着越来越多的私家车快速普及,人们对汽车安全驾驶的要求越来越高,不幸的是交通事故时有发生,占比很大的夜间交通事故中前照灯是一个主要原因。汽车车灯是夜间车辆照明的关键部件,尤其是在城乡道路、山区道路以及雨雾天气下具有重要的作用,有数据表明灯光是司机视觉神经夜间接收到的关键信息。传统的车灯卤素前照灯和疝气前照灯,存在造型单一、远光灯炫目、无法主动提醒、车灯空间资源紧张等诸多问题,无法满足驾驶舒适性、安全性、科技感、智能化等现代消费者的需求。因此,需要一种安全、环保以及智能的汽车前照灯,以提高交通安全性并减少行人伤亡,同时增强司机的驾驶乐趣。当前,只有少数几家国际著名车灯企业,诸如德国hella和日本小糸等公司,开展汽车车灯智能化方面的研发。
2、传统的汽车前照灯在使用过程中存在一些不足。首先,汽车前照灯照明模式中具有最大安全隐患的是远光灯不当使用,汽车夜间在会车时如果不及时关闭远光灯,容易对行驶车辆司机造成炫目,同时远光也会对路边的行人造成不舒适感更有甚者会造成一些轻微的损伤,从而给双方行车安全带来很大的隐晦,当汽车以100km/h的速度行驶未遇到远光灯可以在42m位置停车,而对面车辆有远光灯时需要在79m位置停车;其次,汽车行驶过程中前后车辆司机均在封闭空间,一旦前方车辆行驶过程中出现异常车况而被后方车辆察觉,无法跟前方车辆进行交流交互,根本无法及时告知前方车辆所处异常工况;然后,司机长时间驾驶尤其是复杂气候环境下驾驶,容易出现注意力不集中而处于危险驾驶中,无法提供有效的主动提醒手段来保障司机的行驶安全;最后,司机夜间驾驶车辆不熟悉的道路时,尤其是弯曲的乡间道路,当车辆左转弯时容易出现车道左侧照明不足的问题,而车辆右转弯时容易出现车道右侧照明不足的问题,需要利用车辆导航数据提前确定车道弯曲度从而对照明进行补偿。如何有效地丰富车灯功能吸引了许多研究人员的关注。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种夜间汽车智能前照灯控制系统及方法,解决了现有的车灯传感器功能缺失,导致汽车司机行车安全存在诸多隐患的问题。
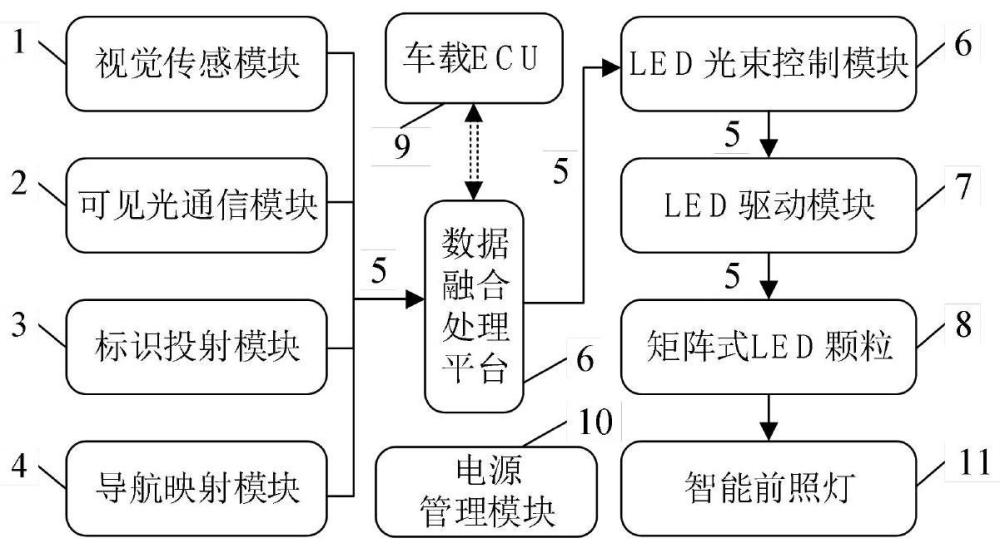
2、针对上述问题,一种夜间汽车智能前照灯控制系统及方法,包括视觉传感模块、可见光通信模块、标识投射模块、导航映射模块、数据通信总线模块、数据融合处理平台、led光束控制模块、led驱动模块、矩阵式led颗粒、车载mcu及电源管理模块组成,其特征在于:
3、1)视觉传感模块包括高速摄像头单元、图像快速计算单元、以及通信协议单元a,通过高速摄像头单元实时采集汽车前方车辆、行人以及环境数据,在图像处理计算单元中解析出对应的车辆、行人以及环境目标,通过通信协议单元a传输到数据融合处理平台,由电源管理模块为高速摄像头单元、图像处理计算单元及通信协议单元a提供所需的电源。
4、2)可见光通信模块包括外部语音输入单元、光电信号调制单元、电光信号解调单元、及通信协议单元b,由外部语音输入单元通过通信协议单元b,输入要与前方同向车辆尾灯进行通信的语音数据,经过数据融合处理平台转化为对应的二进制数据,经过光电信号调制单元由led光束传输到前方同向车辆,继而利用前方同向车辆的电光信号解调单元解析出由led光束传输的数据,通信协议单元b为语音交互专用协议负责外部语音的传输,由电源管理模块为外部语音输入单元、光电信号调制单元、电光信号解调单元、通信协议单元b提供所需的电源。
5、3)标识投射模块包括图像标识库、投射图像校正单元、光学投射镜组、以及存储单元,由电源管理模块供电的存储单元中导入图像标识库,基于视觉传感模块反馈的环境参数在图像标识库里面获得对应的图像,对不同几何形状的图像在路面投射会呈现远大近小的变形,利用投射图像校正单元对所投射图像特征点进行补偿,由光学投射镜组在前方道路进行投射经过校正的图像,环境数据由通信协议单元a传输到数据融合处理平台。
6、4)导航映射模块包括车载导航系统、道路地图数据、道路几何参数解析单元、以及通信协议单元c,将车载导航系统的道路地图数据传输到数据融合处理平台,经过道路几何参数解析单元计算出车辆前方道路曲度系数,通信协议单元c为导航交互专用协议,负责将将车载导航系统的道路地图数据传输给数据融合处理平台,由电源管理模块为车载导航系统、道路几何参数解析单元以及通信协议单元c提供所需的电源。
7、5)数据融合处理平台接收到来自视觉传感模块的前方车辆、以及行人数据,和接收到来自导航映射模块的道路地图数据,基于汽车前照灯灯光分区与车辆、行人、道路间的亮灭模型,解析出不同位置车辆、不同远近行人以及不同曲度道路需要控制的不同led颗粒,将要控制的led颗粒编号发送给led光束控制模块,由led驱动模块驱动对应的矩阵式led颗粒,数据融合处理平台与led光束控制模块采用通信协议单元d,led光束控制模块与led驱动模块采用通信协议单元e,电源管理模块为led光束控制模块、led驱动模块、通信协议单元d、通信协议单元e提供所需的电源。
8、6)矩阵式led颗粒由多颗led颗粒按照一定位置和角度分布在汽车前照灯内,每颗led颗粒的亮度和暗灭可由led驱动模块发出的控制指令进行独立控制,通过调整不同led的亮度和暗灭可以对汽车前方道路形成不同的照明区域,从而到达根据车况实际情况对道路进行自适应照明。
9、7)数据融合平台与车载mcu间采用通信协议单元f,数据融合平台需要将获得智能车灯的控制信号通过通信协议单元f发送给车载mcu,车载mcu具有最高优先级可以向下发控制信号。
10、数据通信总线模块包括视觉传感模块与数据融合处理平台的通信、外部语音输入单元与数据融合处理平台的通信、车载导航系统与数据融合处理平台的通信,数据融合处理平台与led光束控制模块的通信、led光束控制模块与led驱动模块的通信、数据融合处理平台与车载mcu的通信;所述的视觉传感模块与数据融合处理平台间通信协议单元a为rs485总线协议;所述的外部语音输入单元与数据融合处理平台间通信协议单元b为语音交互专用协议;所述的车载导航系统与数据融合处理平台间通信协议单元c为导航交互专用协议;所述的数据融合处理平台与led光束控制模块间通信协议单元d为can总线协议;所述的led光束控制模块与led驱动模块间通信协议单元e为can总线协议;所述的数据融合处理平台与车载mcu间通信协议单元f为can总线协议。
11、一种夜间汽车智能前照灯控制方法,包括视觉传感模块、可见光通信模块、标识投射模块、导航映射模块、数据通信总线模块、数据融合处理平台、led光束控制模块、led驱动模块、矩阵式led颗粒、车载mcu及电源管理模块组成,其特征在于:
12、所述视觉传感模块包括高速摄像头单元、图像快速计算单元、以及通信协议单元a,通过高速摄像头单元实时采集汽车前方车辆、行人以及环境数据,在图像处理计算单元中解析出对应的车辆、行人以及环境目标,通过通信协议单元a传输到数据融合处理平台,由电源管理模块为高速摄像头单元、图像处理计算单元及通信协议单元a提供所需的电源;
13、所述可见光通信模块包括外部语音输入单元、光电信号调制单元、电光信号解调单元、及通信协议单元b,由外部语音输入单元通过通信协议单元b,输入要与前方同向车辆尾灯进行通信的语音数据,经过数据融合处理平台转化为对应的二进制数据,经过光电信号调制单元由led光束传输到前方同向车辆,继而利用前方同向车辆的电光信号解调单元解析出由led光束传输的数据,通信协议单元b为语音交互专用协议负责外部语音的传输,由电源管理模块为外部语音输入单元、光电信号调制单元、电光信号解调单元、通信协议单元b提供所需的电源;
14、所述标识投射模块包括图像标识库、投射图像校正单元、光学投射镜组、以及存储单元,由电源管理模块供电的存储单元中导入图像标识库,基于视觉传感模块反馈的环境参数在图像标识库里面获得对应的图像,对不同几何形状的图像在路面投射会呈现远大近小的变形,利用投射图像校正单元对所投射图像特征点进行补偿,由光学投射镜组在前方道路进行投射经过校正的图像,环境数据由通信协议单元a传输到数据融合处理平台;
15、所述导航映射模块包括车载导航系统、道路地图数据、道路几何参数解析单元、以及通信协议单元c,将车载导航系统的道路地图数据传输到数据融合处理平台,经过道路几何参数解析单元计算出车辆前方道路曲度系数,通信协议单元c为导航交互专用协议,负责将将车载导航系统的道路地图数据传输给数据融合处理平台,由电源管理模块为车载导航系统、道路几何参数解析单元以及通信协议单元c提供所需的电源;
16、所述数据融合处理平台接收到来自视觉传感模块的前方车辆、以及行人数据,和接收到来自导航映射模块的道路地图数据,基于汽车前照灯灯光分区与车辆、行人、道路间的亮灭模型,解析出不同位置车辆、不同远近行人以及不同曲度道路需要控制的不同led颗粒,将要控制的led颗粒编号发送给led光束控制模块,由led驱动模块驱动对应的矩阵式led颗粒,数据融合处理平台与led光束控制模块采用通信协议单元d,led光束控制模块与led驱动模块采用通信协议单元e,电源管理模块为led光束控制模块、led驱动模块、通信协议单元d、通信协议单元e提供所需的电源;
17、所述矩阵式led颗粒由多颗led颗粒按照一定位置和角度分布在汽车前照灯内,每颗led颗粒的亮度和暗灭可由led驱动模块发出的控制指令进行独立控制,通过调整不同led的亮度和暗灭可以对汽车前方道路形成不同的照明区域,从而到达根据车况实际情况对道路进行自适应照明;
18、所述数据融合平台与车载mcu间采用通信协议单元f,数据融合平台将获得智能车灯的控制信号通过通信协议单元f发送给车载mcu,车载mcu具有最高优先级可以向下发控制信号;
19、汽车智能前照灯由高速摄像头单元对汽车前方车辆、行人及环境数据进行实时采集,以嵌入式开发平台作为图像处理计算中心基于所设计的图像处理算法,实时解析出对应的车辆、行人及环境目标,同时将解算得到的数据通过通信协议单元a即rs485总线协议传输到数据融合处理平台;智能前照灯由外部语音输入单元通过通信协议单元b,输入要与前方同向车辆尾灯进行通信的语音数据,经过数据融合处理平台转化为对应的二进制数据,经过光电信号调制单元由led光束传输到前方同向车辆,继而利用前方同向车辆的电光信号解调单元解析出由led光束传输的数据;智能前照灯基于视觉传感模块反馈的环境参数在图像标识库里面获得对应的图像,对不同几何形状的图像在路面投射会呈现远大近小的变形,利用投射图像校正单元对所投射图像特征点进行补偿,由光学投射镜组在前方里面进行投射经过校正的图像;智能前照灯将车载导航系统的道路地图数据传输到数据融合处理平台,经过道路几何参数解析单元计算出车辆前方道路曲度系数,通信协议单元c为导航交互专用协议,负责将将车载导航系统的道路地图数据传输给数据融合处理平台;
20、汽车智能前照灯数据融合处理平台接收到来自视觉传感模块的前方车辆、以及行人数据,和接收到来自导航映射模块的道路地图数据,基于汽车前照灯灯光分区与车辆、行人、道路间的亮灭模型,解析出不同位置车辆、不同远近行人以及不同曲度道路需要控制的不同led颗粒,将要控制的led颗粒编号发送给led光束控制模块,由led驱动模块驱动对应的矩阵式led颗粒,而矩阵式led颗粒由多颗led颗粒按照一定位置和角度分布在汽车前照灯内,每颗led颗粒的亮度和暗灭可由led驱动模块发出的控制指令进行独立控制,通过调整不同led的亮度和暗灭可以对汽车前方道路形成不同的照明区域,从而到达根据车况实际情况对道路进行自适应照明,数据融合平台与车载mcu间采用通信协议单元f,数据融合平台需要将获得智能车灯的控制信号通过通信协议单元f发送给车载mcu,车载mcu具有最高优先级可以向下发控制信号;
21、汽车智能前照灯能够根据车况实际情况对道路进行自适应切换照明模式,当汽车行驶过程中前方出现反向车辆以及路边出现行人时,为了避免远光灯对反向车辆司机和行人直射造成的炫目影响,在led光束控制模块在通信协议e支持下,结合视觉传感模块获得的车辆、行人与led光束光区的映射关系,独立控制对应的led颗粒的亮灭,从而到达对反向车辆区域和行人区域对应部分的远光灯关闭,当汽车行驶过程中前方车辆出现驾驶危险征兆或者需要与前方进行沟通交流,为了避免无法与前方车辆进行交流的不足,通过外部语音输入需要交流信息通过前照灯led将信息发送到前方车辆的尾灯,前方车辆通过解调可以得到对应的语音信息,从而达到利用车灯与前方车辆进行实时交流的目的,当汽车行驶过程中出现雨雾冰雪等自然灾害,同时司机由于多种原因出现驾驶注意力不集中的情况,为了避免复杂气候条件下引起驾驶事故的可能性,由视觉传感模块获得对应的环境参数,继而在图像标识库选择对应的标识,由汽车前照灯led车灯对对应的标识在路面进行投射,从而实现车灯进行主动提醒的目的,当汽车行驶过程在路灯照明不足的道路转弯时,为了避免车辆转弯时对应方向的光束未能有效照明的不足,一旦路边有行人或者其他车辆通过时可能会引发事故,在led光束控制模块在通信协议e支持下,结合导航映射模块获得的道路与led光束光区的映射关系,独立控制对应的led颗粒的亮灭,从而到达对反向车辆区域和行人区域对应部分的远光灯关闭;
22、汽车智能前照灯能够根据汽车当前所处的不同车况,进行不同的工作模式切换,采用视觉传感模块对车前的同向车辆、反向车辆、路边行人以及不同气候目标进行识别,采用led可见光与前方尾灯进行信息交流,采用标识投射模块在路面投射对应图案标识对司机进行主动提醒,采用道路地图数据来解析车道曲度和宽度系数,当汽车行驶过程中当前方出现车辆和行人时,能够对led颗粒进行相应的控制,形成自适应远光灯从而避免光束对车辆司机和行人的直射;当汽车行驶过程中需要与前车进行交流时,采用led可见光向前车尾灯发送对应的信息,能够利用车灯实现车辆司机间的交流;当汽车行驶过程中遇到复杂气候条件时,可以利用led车灯在路面投射对应的图案标识,从而利用车灯做到主动安全提醒;当汽车行驶过程在路灯照明不足转弯时,利用导航数据来提前计算道路曲度系数,来对对应转向的区域进行光束补偿。
23、有益效果,由于采用了上述方案,前方有反向车辆和路边有行人时,智能前照灯可以根据车辆和行人位置调整led光束照射方向和亮度;当需要与前方同向车辆进行交流时,可以采用可见光通信向前方同向车辆尾灯发送信息;当出现雨、雪、路滑天气时,可以利用车灯光束在路面进行对应环境标识的照明与主动提醒;当车辆行驶在转弯路段时,可以提取车载导航系统的道路地图数据进行车辆转向时光束补偿。本发明的功能智能车灯,根据不同的车况对智能车灯采用不同的工作模式,通过智能车灯来提升汽车的安全驾驶。
- 还没有人留言评论。精彩留言会获得点赞!