一种展厅烟雾探测器数据的高效采集分析方法与流程
本发明涉及数据处理,尤其涉及一种展厅烟雾探测器数据的高效采集分析方法。
背景技术:
1、展厅烟雾探测器在防火安全方面具有非常重要的意义,其可以对当前空间内产生的烟雾含量值进行实时监测和警报,为火灾风险评估提供数据支持,其次烟雾探测器的实时监测有助于保障展厅参观者和工作人员的人身安全。通常情况下,展厅烟雾探测器主要通过监测展厅内的烟雾浓度数据来判断烟雾密度大小,进而根据监测结果实现预警处理,但由于该监测过程为实时统计的高频率数据采集处理,使得展厅烟雾探测器的监测过程中会产生大量的烟雾浓度含量数据值,因此,需要对展厅烟雾探测器监测的烟雾浓度含量数据值进行数据压缩采集处理,释放系统的存储压力且更加高效地实现数据的分析。
2、现有技术中,通过利用传统压缩算法对展厅烟雾探测器监测的烟雾浓度含量数据值进行数据压缩采集处理,其中传统压缩算法有游程编码、零值编码和字典编码等,但由于传统压缩算法过于依赖原始数据集,即均对于重复相似性高得数据集的压缩效果较好,对于重复相似性低(数据值差异或变化较大)的数据集的压缩效果较差,而展厅烟雾探测器的监测过程中所产生的烟雾浓度含量的数据变化整体呈现非线性且具有随机性,因此,传统的游程编码算法对于展厅烟雾探测器所获取的烟雾浓度监测数据的压缩处理效果不佳;
3、故,如何提高展厅烟雾探测器所获取的烟雾浓度监测数据的压缩处理效果,以进行更加精致的预警成为亟需解决的问题。
技术实现思路
1、有鉴于此,本发明实施例提供了一种展厅烟雾探测器数据的高效采集分析方法,以解决如何提高展厅烟雾探测器所获取的烟雾浓度监测数据的压缩处理效果,以进行更加精致的预警的问题。
2、本发明实施例中提供了一种展厅烟雾探测器数据的高效采集分析方法,所述高效采集分析方法包括以下步骤:
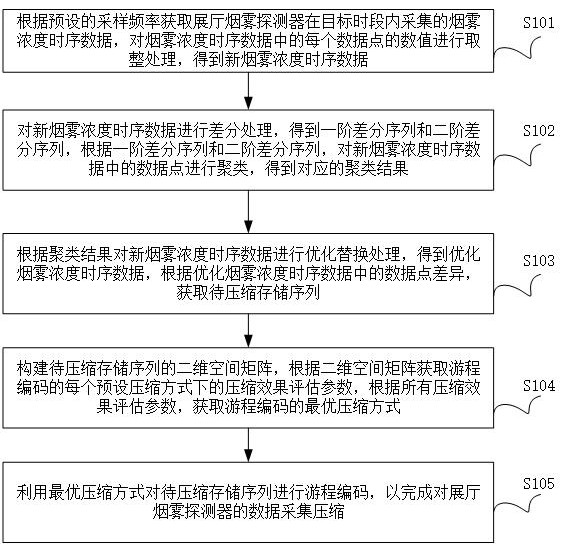
3、根据预设的采样频率获取展厅烟雾探测器在目标时段内采集的烟雾浓度时序数据,对所述烟雾浓度时序数据中的每个数据点的数值进行取整处理,得到新烟雾浓度时序数据;
4、对所述新烟雾浓度时序数据进行差分处理,得到一阶差分序列和二阶差分序列,根据所述一阶差分序列和所述二阶差分序列,对所述新烟雾浓度时序数据中的数据点进行聚类,得到对应的聚类结果;
5、根据所述聚类结果对所述新烟雾浓度时序数据进行优化替换处理,得到优化烟雾浓度时序数据,根据所述优化烟雾浓度时序数据中的数据点差异,获取待压缩存储序列;
6、构建所述待压缩存储序列的二维空间矩阵,根据所述二维空间矩阵获取游程编码的每个预设压缩方式下的压缩效果评估参数,根据所有压缩效果评估参数,获取所述游程编码的最优压缩方式;
7、利用所述最优压缩方式对所述待压缩存储序列进行游程编码,以完成对所述展厅烟雾探测器的数据采集压缩。
8、优选的,所述根据所述一阶差分序列和所述二阶差分序列,对所述新烟雾浓度时序数据中的数据点进行聚类,得到对应的聚类结果,包括:
9、以一阶差分值为横轴,以二阶差分值为纵轴,构建二维聚类空间,根据所述一阶差分序列和所述二阶差分序列,将所述新烟雾浓度时序数据中的数据点映射在所述二维聚类空间中,并使用k-means聚类算法对所述二维聚类空间中的数据点进行聚类,以将所述新烟雾浓度时序数据中的数据点划分为第一聚类簇、第二聚类簇和第三聚类簇,其中,所述第一聚类簇、所述第二聚类簇和所述第三聚类簇之间的数据点数值的重要程度依次增加。
10、优选的,所述根据所述聚类结果对所述新烟雾浓度时序数据进行优化替换处理,得到优化烟雾浓度时序数据,包括:
11、获取所述第一聚类簇在所述新烟雾浓度时序数据中的至少一个数据子序列,
12、针对数据点数量超过预设数量阈值的任一数据子序列中的任一数据点,获取所述数据子序列中的起始数据点和末尾数据点,获取所述起始数据点和所述末尾数据点之间的数值差值,根据所述起始数据点和所述末尾数据点分别在所述数据子序列中的位置编号,计算位置编号差值,计算所述数值差值与所述位置编号差值之间的第一比值;
13、获取所述第一比值与所述末尾数据点的位置编号之间的第一乘积,将所述起始数据点的位置编号与所述第一乘积的差值作为所述数据点的函数截距,获取所述数据点在所述数据子序列中的位置编号,获取所述数据点在所述数据子序列中的位置编号与所述第一比值之间的第二乘积,将所述第二乘积与所述数据点的函数截距之间的相加结果作为所述数据点的替换值。
14、优选的,所述根据所述聚类结果对所述新烟雾浓度时序数据进行优化替换处理,得到优化烟雾浓度时序数据,包括:
15、针对所述第二聚类簇中的任一数据点,根据所述数据点在新烟雾浓度时序数据中的位置,在所述新烟雾浓度时序数据中获取与所述数据点属于前相邻且属于所述第三聚类簇中的数据点作为第一目标数据点,在所述新烟雾浓度时序数据中获取与所述数据点属于后相邻且属于所述第三聚类簇中的数据点作为第二目标数据点,获取所述第一目标数据点和所述第二目标数据点之间的数值均值;
16、根据所述第一目标数据点和所述数据点分别在新烟雾浓度时序数据中的位置编号,获取第一位置差异距离,根据所述第二目标数据点和所述数据点分别在新烟雾浓度时序数据中的位置编号,获取第二位置差异距离,计算所述第一位置差异距离和所述第二位置差异距离之间的加和结果;
17、将所述数值均值和所述加和结果之间的比值作为所述数据点的替换值。
18、优选的,所述根据所述二维空间矩阵获取游程编码的每个预设压缩方式下的压缩效果评估参数,包括:
19、针对任一预设压缩方式,在所述二维空间矩阵中获取所述预设压缩方式下连续相等数值所对应的至少一个连续数据段,根据每个所述连续数据段所包含的数据点数量,获取最大数据点数量以及数据点数量超过预设的第一数量阈值的连续数据段数量;
20、获取所述待压缩存储序列的序列长度,计算所述序列长度与所述最大数据点数量之间的第二比值,对所述连续数据段数量进行归一化处理,得到对应的归一化值,将所述第二比值和所述归一化值进行加权求和的结果作为所述预设压缩方式的压缩效果评估参数。
21、优选的,所述根据所述优化烟雾浓度时序数据中的数据点差异,获取待压缩存储序列,包括:
22、对所述优化烟雾浓度时序数据中的数据点进行一阶差分处理,得到初始差分序列,将所述优化烟雾浓度时序数据中的第一个数据点和所述初始差分序列组成待压缩存储序列。
23、优选的,所述对所述烟雾浓度时序数据中的每个数据点的数值进行取整处理,得到新烟雾浓度时序数据,包括:
24、根据所述烟雾浓度时序数据中所有数据点的数值中的小数部分的数据量,获取小数部分的最大数据量,根据所述小数部分的最大数据量,获取统一倍数;
25、分别获取所述烟雾浓度时序数据中的每个数据点的数值与所述统一倍数之间的乘积,得到新烟雾浓度时序数据。
26、优选的,所述根据所有压缩效果评估参数,获取所述游程编码的最优压缩方式,包括:
27、对比所有压缩效果参数,将最大的压缩效果参数所对应的预设压缩方式作为所述游程编码的最优压缩方式。
28、优选的,所述预设压缩方式包括横向压缩和纵向压缩。
29、本发明实施例与现有技术相比存在的有益效果是:
30、本发明根据预设的采样频率获取展厅烟雾探测器在目标时段内采集的烟雾浓度时序数据,对所述烟雾浓度时序数据中的每个数据点的数值进行取整处理,得到新烟雾浓度时序数据;对所述新烟雾浓度时序数据进行差分处理,得到一阶差分序列和二阶差分序列,根据所述一阶差分序列和所述二阶差分序列,对所述新烟雾浓度时序数据中的数据点进行聚类,得到对应的聚类结果;根据所述聚类结果对所述新烟雾浓度时序数据进行优化替换处理,得到优化烟雾浓度时序数据,根据所述优化烟雾浓度时序数据中的数据点差异,获取待压缩存储序列;构建所述待压缩存储序列的二维空间矩阵,根据所述二维空间矩阵获取游程编码的每个预设压缩方式下的压缩效果评估参数,根据所有压缩效果评估参数,获取所述游程编码的最优压缩方式;利用所述最优压缩方式对所述待压缩存储序列进行游程编码,以完成对所述展厅烟雾探测器的数据采集压缩。其中,根据烟雾浓度时序数据中的数据差异,将烟雾浓度时序数据划分为多个类别,并分别根据每个类别的数据变化特征,对类别中的每个数据值进行优化替换处理,在提高烟雾浓度时序数据的数据重复冗余性的同时,还能保留原始数据的数据变化特征,进而基于优化烟雾浓度时序数据中的数据点差异,获取待压缩存储序列,并利用最优压缩方式对待压缩存储序列进行游程编码,使得在大大释放采集存储压力的同时,便于分析目标时段内烟雾浓度特征,从而实现更为精准的报警或预警。
- 还没有人留言评论。精彩留言会获得点赞!