一种车路协同V2I仿真测试系统及其方法
一种车路协同v2i仿真测试系统及其方法
技术领域
1.本发明涉及智能交通领域,特别是一种车路协同v2i仿真测试系统及其方法。
背景技术:
2.汽车是人类目前使用最为频繁的交通及货运工具之一,它的大规模使用极大的提升了人类日常出行的便利性及货物运输的效率。同时,车辆增长也带来了交通拥挤、交通事故等负面的影响。智能交通系统通过融合通信、传感器、计算机等领域的先进科学技术,在满足日益增长的交通量的需求的同时,提高车辆在行驶过程中的安全性,保护驾驶员生命和财产安全,已经成为了世界各大车企及汽车研究所的重点研究对象。依靠短程无线通讯技术、自动控制技术、计算机技术,智能交通系统能实现人、车、路的有效协同,提高了交通运输效率,保障交通安全。车用无线通信技术(vehicle to everything,v2x)是智能交通系统实现高效率高可靠车路协同的关键支撑技术。
3.开展智能驾驶汽车和v2x车路协同系统在复杂交通场景下的性能测试和功能验证,是推进智能交通系统建设的必要任务。与真实道路测试相比,利用计算机仿真技术,在实验室内建立仿真测试系统开展车路协同仿真,具有经济、安全、可重复、可控制、可拓展等优势。
4.苏州昆朋智能网联科技有限公司在专利cn202010289655.0中提出了一种基于车路协同的v2x测试在线仿真系统及装置,搭建了v2x实测环境,并布置了隧道和模拟建筑,给出了通信环境信号测试、信号屏蔽测试步骤,但所构建的场景还较简单,测试功能不够全面。
5.西藏民族学字信息工程学院提出了基于多传感器融合的智能车路协同仿真系统(樊瑶,褚燕利.基于多传感器融合的智能车路协同仿真系统[j].公路,2014,59(10):189
‑
193.),利用地感线圈、rfid、视频摄像头等传感器获取车辆及道路信息,但仿真测试过程仍依赖于真实道路。
技术实现要素:
[0006]
针对现有技术中存在的问题,本发明提供了一种节约场地设施、无需搭建复杂仪器设备,成本低、应用灵活,效率高的车路协同v2i仿真测试系统及其方法。
[0007]
本发明的目的通过以下技术方案实现。
[0008]
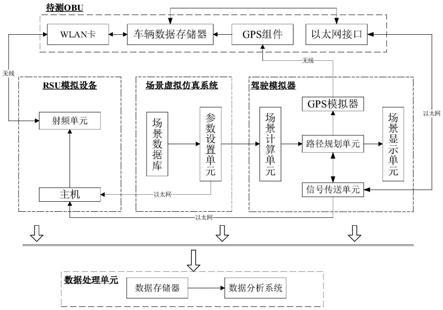
一种车路协同v2i仿真测试系统,包括:场景虚拟仿真系统、驾驶模拟器、rsu模拟设备、待测obu、数据处理单元,所述场景虚拟仿真系统包括场景数据库和参数设置单元;所述驾驶模拟器包括场景计算单元、路径规划单元、场景显示单元、信号传送单元,gps模拟器;所述rsu模拟设备包括主机和射频单元;所述待测obu包括gps组件、车辆数据存储器、wlan卡、以太网接口;所述数据处理单元包括数据存储器和数据分析系统;所述主机至射频单元单向连接,所述射频单元通过无线与wlan卡双向连接,所述wlan卡与车辆数据存储器双向连接,所述gps组件至车辆数据存储器单向连接,所述车辆数据存储器与以太网接口双
向连接,所述以太网接口与信号传送单元通过以太网双向连接,所述信号传送单元至主机通过以太网单向连接,所述场景数据库、参数设置单元、场景计算单元、路径规划单元、场景显示单元依次单向连接,所述路径规划单元与信号传送单元双向连接,所述路径规划单元至gps模拟器单向连接,所述gps模拟器至gps组件通过无线单向连接,所述参数设置单元至主机通过以太网单向连接。
[0009]
所述场景虚拟仿真系统用于产生模拟测试场景所需的数据,根据选择的测试场景,虚拟仿真系统从场景数据库中读取该场景的模型数据,所述模型数据包括路侧单元rsu初始数据、道路状况数据、行人数据,参数设置单元接收到模型数据后,生成相应的道路、环境、路侧单元rsu的参数,通过千兆以太网分别将rsu初始数据传输给rsu模拟设备,将道路、环境、路侧单元数据传输给驾驶模拟器,场景数据库包括v2i车路协同场景,用于模拟绿波车速引导、前方拥堵提醒、道路危险状况提示、限速标志提示、施工标志提示、闯红灯预警、盲区行人穿越预警、匝道车辆汇入预警场景。
[0010]
所述驾驶模拟器用于计算车辆行驶状态、实时显示模拟的驾驶场景,根据场景虚拟仿真系统传送的数据,场景计算单元生成测试车辆所处的道路、环境、路侧设备数据,以及车辆初始的位置、速度和方向信息,所述路径规划单元计算测试车辆的行驶路径,并实时更新测试车辆的速度、位置、前进方向数据,同时产生并更新rsu数据,所述路径规划单元结合当前rsu数据、车辆状态数据,当判断待测车辆存在潜在的交通危险状况时,重新规划路径,调整测试车辆的速度和前进方向,所述gps模拟器根据路径规划单元产生的测试车辆位置数据,生成模拟gps高精度定位信号,并发送给待测obu的gps组件,所述信号传送单元通过以太网将路径规划单元产生的测试车辆速度和行驶方向数据传送给待测obu,将rsu实时数据发送给rsu模拟设备,所述场景显示单元依据路径规划单元产生的实时数据和场景数据库,从测试车辆观察角度在显示屏上显示前方道路虚拟场景,并实时更新。
[0011]
所述rsu模拟设备用于和待测obu通信,所述主机根据场景虚拟仿真系统传送的rsu初始数据以及路径规划单元产生的rsu数据,生成模拟场景中路侧单元的实时数据,并对射频单元配置信道和频率,所述射频单元以无线传输方式广播rsu信息,并与测试车辆车载终端obu进行通信。
[0012]
所述待测obu为测试车辆所携带的obu设备,通过wlan卡以无线传输方式向rsu模拟器实时发送车辆速度、位置、方向信息,所述待测obu从千兆以太网接口接收由信号传送单元发送的实时速度、位置、前进方向数据,同时经过千兆以太网接口向信号传送单元发送接收到的rsu信息,并传给路径规划单元。
[0013]
所述数据存储器捕获并存储rsu模拟设备广播的rsu信息,以及存储待测obu发送给rsu模拟设备的实时状态数据,所述数据分析系统用于分析模拟场景测试中生成的数据,评估待测obu通信性能。
[0014]
一种车路协同v2i仿真测试方法,包括以下步骤:
[0015]
1)场景虚拟仿真系统根据所选择的测试场景,读取场景数据库中对应场景的模型数据,包括路侧单元rsu初始数据、道路状况、环境、行人数据;
[0016]
2)参数设置单元生成道路、环境、行人、路侧单元rsu参数,通过以太网分别将rsu数据传输给rsu模拟设备,将道路、环境、行人数据传输给驾驶模拟器;
[0017]
3)驾驶模拟器中场景计算单元依据测试车辆所处的道路、环境、行人数据生成虚
拟场景,并根据测试车辆选型生成测试车辆的长、宽、高数据,以及车辆初始的位置、速度和方向参数,场景显示单元从测试车辆观察角度显示前方道路、行人、环境场景信号传送单元信通过有线方式将道路、环境、行人数据传送给rsu模拟设备,将测试车辆长、宽、高数据,初始位置、速度和方向参数传送给待测obu;
[0018]
4)驾驶模拟器中路径规划单元依据场景模型和初始数据,产生测试车辆的行驶路径,实时更新测试车辆的速度、位置、前进方向数据,信号传送单元2通过有线方式将实时车辆状态数据发送给待测obu,同时路径规划单元产生并更新rsu数据,并通过信号传送单元以有线方式传送给rsu模拟设备,rsu模拟设备和待测obu实时获得并不断更新状态数据;
[0019]
5)rsu模拟设备和待测obu进行信息交互,射频单元以无线传输方式广播rsu信息,待测obu接收到rsu信息后,通过千兆以太网接口向信号传送单元发送rsu信息,并传给路径规划单元,当路径规划单元根据rsu信息和测试车辆当前位置、速度、方向需做出驾驶预警时,改变测试车辆位置、速度、方向,并由信号传送单元传给待测obu,待测obu将测试车辆的速度、位置、方向信息发送给rsu模拟设备;
[0020]
6)数据存储器捕获并存储rsu模拟设备广播的rsu信息,以及存储待测obu发送给rsu模拟设备的实时状态数据,数据分析系统分析模拟场景测试中生成的数据,评估待测obu通信性能。
[0021]
相比于现有技术,本发明的优点在于:
[0022]
(1)本发明只需在实验室内开展车路协同v2i场景测试,不依赖于实际测试道路和整个待测车辆,节约场地设施。
[0023]
(2)无需搭建复杂仪器设备,可较为全面地检测待测车辆obu的通信交互、路径规划与决策能力,成本低。
[0024]
(3)本发明包含多个v2i测试场景,通过增加场景数据库的场景模型,即可增添更多v2i测试场景,应用灵活,效率高。
附图说明
[0025]
图1是本发明车路协同v2i仿真测试系统结构图。
[0026]
图2是本发明车路协同v2i仿真测试流程图。
[0027]
图3是实例一测试场景示意图。
[0028]
图4是实例二测试场景示意图。
具体实施方式
[0029]
下面结合说明书附图和具体的实施例,对本发明作详细描述。
[0030]
v2x车路协同交互方式包括车辆与车辆(v2v)、车辆与基础设施(v2i)、车辆与行人(v2p)、车辆与外部网络(v2n)等的通信。本发明的目的是:提出一种车路协同v2i仿真测试系统和方法,在实验室内,利用仿真系统生成v2i场景的数据,产生道路、环境、行人、车辆的模拟信息,开展对测试车辆obu性能的测试。
[0031]
如图1所示,一种车路协同v2i仿真测试系统,包括:场景虚拟仿真系统、驾驶模拟器、rsu模拟设备、待测obu、数据处理单元,所述场景虚拟仿真系统包括场景数据库和参数设置单元;所述驾驶模拟器包括场景计算单元、路径规划单元、场景显示单元、信号传送单
元,gps模拟器;所述rsu模拟设备包括主机和射频单元;所述待测obu包括gps组件、车辆数据存储器、wlan卡、以太网接口;所述数据处理单元包括数据存储器和数据分析系统;所述主机至射频单元单向连接,所述射频单元通过无线与wlan卡双向连接,所述wlan卡与车辆数据存储器双向连接,所述gps组件至车辆数据存储器单向连接,所述车辆数据存储器与以太网接口双向连接,所述以太网接口与信号传送单元通过以太网双向连接,所述信号传送单元至主机通过以太网单向连接,所述场景数据库、参数设置单元、场景计算单元、路径规划单元、场景显示单元依次单向连接,所述路径规划单元与信号传送单元双向连接,所述路径规划单元至gps模拟器单向连接,所述gps模拟器至gps组件通过无线单向连接,所述参数设置单元至主机通过以太网单向连接。
[0032]
所述场景虚拟仿真系统用于产生模拟测试场景所需的数据,根据选择的测试场景,虚拟仿真系统从场景数据库中读取该场景的模型数据,所述模型数据包括路侧单元rsu初始数据、道路状况数据、行人数据,参数设置单元接收到模型数据后,生成相应的道路、环境、路侧单元rsu的参数,通过千兆以太网分别将rsu初始数据传输给rsu模拟设备,将道路、环境、路侧单元数据传输给驾驶模拟器,场景数据库包括v2i车路协同场景,用于模拟绿波车速引导、前方拥堵提醒、道路危险状况提示、限速标志提示、施工标志提示、闯红灯预警、盲区行人穿越预警、匝道车辆汇入预警场景。
[0033]
所述驾驶模拟器用于计算车辆行驶状态、实时显示模拟的驾驶场景,根据场景虚拟仿真系统传送的数据,场景计算单元生成测试车辆所处的道路、环境、路侧设备数据,以及车辆初始的位置、速度和方向信息,所述路径规划单元计算测试车辆的行驶路径,并实时更新测试车辆的速度、位置、前进方向数据,同时产生并更新rsu数据,所述路径规划单元结合当前rsu数据、车辆状态数据,当判断待测车辆存在潜在的交通危险状况时,重新规划路径,调整测试车辆的速度和前进方向,所述gps模拟器根据路径规划单元产生的测试车辆位置数据,生成模拟gps高精度定位信号,并发送给待测obu的gps组件,所述信号传送单元通过以太网将路径规划单元产生的测试车辆速度和行驶方向数据传送给待测obu,将rsu实时数据发送给rsu模拟设备,所述场景显示单元依据路径规划单元产生的实时数据和场景数据库,从测试车辆观察角度在显示屏上显示前方道路虚拟场景,并实时更新。
[0034]
所述rsu模拟设备用于和待测obu通信,所述主机根据场景虚拟仿真系统传送的rsu初始数据以及路径规划单元产生的rsu数据,生成模拟场景中路侧单元的实时数据,并对射频单元配置信道和频率,所述射频单元以无线传输方式广播rsu信息,并与测试车辆车载终端obu进行通信。
[0035]
所述待测obu为测试车辆所携带的obu设备,通过wlan卡以无线传输方式向rsu模拟器实时发送车辆速度、位置、方向信息,所述待测obu从千兆以太网接口接收由信号传送单元发送的实时速度、位置、前进方向数据,同时经过千兆以太网接口向信号传送单元发送接收到的rsu信息,并传给路径规划单元。
[0036]
所述数据存储器捕获并存储rsu模拟设备广播的rsu信息,以及存储待测obu发送给rsu模拟设备的实时状态数据,所述数据分析系统用于分析模拟场景测试中生成的数据,评估待测obu通信性能。
[0037]
如图2所示,一种车路协同v2i仿真测试方法,包括以下步骤:
[0038]
1)场景虚拟仿真系统根据所选择的测试场景,读取场景数据库中对应场景的模型
数据,包括路侧单元rsu初始数据、道路状况、环境、行人数据;
[0039]
2)参数设置单元生成道路、环境、行人、路侧单元rsu参数,通过以太网分别将rsu数据传输给rsu模拟设备,将道路、环境、行人数据传输给驾驶模拟器;
[0040]
3)驾驶模拟器中场景计算单元依据测试车辆所处的道路、环境、行人数据生成虚拟场景,并根据测试车辆选型生成测试车辆的长、宽、高数据,以及车辆初始的位置、速度和方向参数,场景显示单元从测试车辆观察角度显示前方道路、行人、环境场景信号传送单元信通过有线方式将道路、环境、行人数据传送给rsu模拟设备,将测试车辆长、宽、高数据,初始位置、速度和方向参数传送给待测obu;
[0041]
4)驾驶模拟器中路径规划单元依据场景模型和初始数据,产生测试车辆的行驶路径,实时更新测试车辆的速度、位置、前进方向数据,信号传送单元2通过有线方式将实时车辆状态数据发送给待测obu,同时路径规划单元产生并更新rsu数据,并通过信号传送单元以有线方式传送给rsu模拟设备,rsu模拟设备和待测obu实时获得并不断更新状态数据;
[0042]
5)rsu模拟设备和待测obu进行信息交互,射频单元以无线传输方式广播rsu信息,待测obu接收到rsu信息后,通过千兆以太网接口向信号传送单元发送rsu信息,并传给路径规划单元,当路径规划单元根据rsu信息和测试车辆当前位置、速度、方向需做出驾驶预警时,改变测试车辆位置、速度、方向,并由信号传送单元传给待测obu,待测obu将测试车辆的速度、位置、方向信息发送给rsu模拟设备;
[0043]
6)数据存储器捕获并存储rsu模拟设备广播的rsu信息,以及存储待测obu发送给rsu模拟设备的实时状态数据,数据分析系统分析模拟场景测试中生成的数据,评估待测obu通信性能。
[0044]
实施例一
[0045]
以前方拥堵提示测试场景为例,说明本发明车路协同v2i仿真测试系统和仿真测试方法的实现过程。
[0046]
前方拥堵提示测试场景如图3所示,测试道路为至少包含一条车道的长直道,并于该路段安装路侧单元rsu,路侧单元rsu通过摄像头检测该道路拥堵情况,并向周围车辆广播道路拥堵情况。测试车辆沿测试路线行驶,接近路侧单元,在距离路侧单元rsu100m前,车速至少为30km/h。当测试车辆与路侧单元距离不足100m时,车载单元obu根据接收到的路侧单元rsu广播的前方拥堵提示信息,经过处理后,提示驾驶员将进入前方拥堵路段,测试车辆减速慢行。测试车辆通过该场景测试的要求包括:
[0047]
(a)测试车辆正确判断车辆前方道路是否有交通拥堵。
[0048]
(b)若前方道路存在交通拥堵,测试车辆减速慢行,与拥堵区域之间的距离至少为3米。
[0049]
选择该场景,应用本发明测试方法,开展车路协同v2i仿真测试,步骤如下:
[0050]
步骤1,仿真测试系统各个模块完成参数初始化配置,选择前方拥堵提示测试场景,并输入测试系统。场景虚拟仿真系统根据所选择的测试场景,读取场景数据库中前方拥堵提示测试场景的模型数据,包括测试车辆车牌号、初始位置、速度、方向,路侧单元rsu编号、位置,测试道路以及周边环境、拥堵路段初始位子和范围、拥堵车辆等参数。测试道路包含2条车道的长直道,前方路段安装路侧单元rsu,道路两侧布置树木、路灯、楼房等,前方路段有较多缓慢行驶的车辆。测试车辆初始速度为30km/h,到路侧单元rsu的距离为100m。
[0051]
步骤2,参数设置单元生成道路、环境、拥堵车辆、拥堵路段数据,并传输给驾驶模拟器。参数设置单元生成相应的道路拥堵信息,道路拥堵信息包括拥堵路段起点的经度、纬度、海拔,终点的经度、纬度、海拔数据,以及拥堵的类型。
[0052]
步骤3,驾驶模拟器中场景计算单元生成前方拥堵虚拟场景,并根据测试车辆选型生成测试车辆的长、宽、高数据,依据车辆初始的位置、速度和方向参数模拟测试车辆行驶状态。场景显示单元从测试车辆观察角度显示前方车道、环境、拥堵场景,模拟仪表盘显示测试车辆当前速度。信号传送单元通过以太网将道路拥堵信息传送给rsu模拟设备,将测试车辆长、宽、高数据,初始位置、速度和方向参数传送给待测obu。
[0053]
步骤4,驾驶模拟器中路径规划单元依据高精度地图数据和场景模型数据,产生测试车辆的行驶路径,实时更新测试车辆的速度、位置、前进方向等数据,同时规划前方拥堵车辆行驶状态,更新道路拥堵信息。场景显示单元同步更新并显示场景。信号传送单元通过以太网将测试车辆实时状态数据发送给待测obu。同时路径规划单元通过信号传送单元以以太网将道路拥堵信息传送给rsu模拟设备。由此,rsu模拟设备和待测obu实时获得并不断更新状态数据。在拥堵提示之前,测试车辆的速度和方向不变。
[0054]
步骤5,rsu模拟设备和待测obu进行信息交互。射频单元以无线传输方式广播道路拥堵信息。待测obu接收rsu信息,将道路拥堵信息和自身状态信息发送给路径规划单元,由路径规划单元计算测试车辆距离拥堵路段距离,相应改变测试车辆行驶速度。待测obu将测试车辆的速度、位置、方向等信息发送给rsu模拟设备。rsu模拟设备和待测obu信息交互的内容如表1所示。
[0055]
步骤6,当路径规划单元计算得到测试车辆距离拥堵路段的距离少于50米时,提示测试车辆减速,路径规划单元将测试车辆速度逐渐降低,并在距离拥堵路段3米前测试车辆停止。当拥堵路段前移时,测试车辆启动缓慢行驶,与拥堵路段起点始终保持3米以上距离,直到测试结束。期间,数据存储器捕获并存储rsu模拟设备3广播的rsu信息,以及存储待测obu发送给rsu模拟设备的实时状态数据。数据分析系统分析模拟场景测试中生成的数据,评估待测obu通信性能。
[0056]
表1前方拥堵提示rsu和obu交互信息
[0057][0058]
实施例二
[0059]
进一步,以盲区行人穿越预警测试场景为例,说明本发明车路协同v2i仿真测试系
统和仿真测试方法的实现过程。
[0060]
盲区行人穿越预警测试场景如图4所示,测试道路为至少包含两条车道的长直道,并在路段内设置人行横道线。路侧设备rsu通过摄像头监控人行横道线上行人穿越车道的情况,并将穿越信息广播给周围车辆。车跟人行横道上行人之间存在障碍物,视线被遮挡,造成了盲区。测试车辆驶向人行横道线,同时行人沿人行横道线横穿马路,两者存在碰撞风险。测试车辆在距离人行横道线100m前,车速至少为30km/h。当测试车辆距离人行横道线不足50m时,一名行人从车道右侧约20cm处开始以3km/h的速度横穿,运动到车道中心处停下。测试车辆车载单元obu接收路侧设备rsu发送的盲区行人信息,判断出盲区有行人进入,立即对驾驶员进行盲区预警。测试车辆减速直至在行人前停稳。行人继续横穿至车道左侧约20cm外,之后测试车辆以原来车速通过路口。测试车辆通过该场景测试的指标包括:
[0061]
(a)测试车辆接收到路侧设备发送的行人穿越信息后,减速并停止。
[0062]
(b)测试车辆在停车线前停止,到停车线的距离至少为3m。
[0063]
(c)测试车辆与行人不发生碰撞。
[0064]
(d)测试车辆等行人在车道左侧停止后,启动并以原来车速通过人行横道。自行人在车道左侧停止起,测试车辆启动时间不超过30s。
[0065]
选择该场景应用本发明测试方法,开展车路协同v2i仿真测试,步骤如下:
[0066]
步骤1,仿真测试系统各个模块完成参数初始化配置,选择盲区行人穿越预警测试场景,并输入测试系统。场景虚拟仿真系统根据所选择的测试场景,读取场景数据库中盲区行人穿越预警测试场景的模型数据,包括测试车辆车牌号、初始位置、速度、方向,路侧单元rsu编号、位置,测试道路以及周边环境、行人等参数。测试道路包含2条车道的长直道,前方路段安装路侧单元rsu,道路两侧布置树木、路灯、楼房等,前方路段内设置人行横道线。2条车道中间的隔离带布置较多的树木,车辆在人行横道方向上的视线被遮挡,造成了盲区。测试车辆初始速度为30km/h,到路侧单元rsu的距离为100m。一名行人处于车道右侧约20cm处,静止。
[0067]
步骤2,参数设置单元生成道路、人行横道、环境数据,并传输给驾驶模拟器。参数设置单元生成相应行人初始数据,包括行人的高度、起点的经度、纬度、海拔,行走方向、速度。初始速度为0。
[0068]
步骤3,驾驶模拟器中场景计算单元生成盲区行人穿越预警测试场景,并根据测试车辆选型生成测试车辆的长、宽、高数据,依据车辆初始的位置、速度和方向参数,模拟测试车辆行驶状态。场景显示单元从测试车辆观察角度显示前方车道、环境、人行横道,模拟仪表盘显示测试车辆当前速度。信号传送单元12通过以太网将人行横道行人信息传送给rsu模拟设备,将测试车辆长、宽、高数据,初始位置、速度和方向参数传送给待测obu。
[0069]
步骤4,驾驶模拟器中路径规划单元依据高精度地图数据和场景模型数据,产生测试车辆的行驶路径,实时更新测试车辆的速度、位置、前进方向等数据,同时规划行人穿越横道线状态。当测试车辆距离人行横道线不足50m时,行人从车道右侧约20cm处开始以3km/h的速度横穿,运动到车道中心处,并停留2秒,然后继续向前移动。场景显示单元同步更新并显示场景。信号传送单元通过以太网将测试车辆实时状态数据发送给待测obu。同时路径规划单元通过信号传送单元以以太网将行人穿越横道线信息传送给rsu模拟设备。由此,rsu模拟设备和待测obu实时获得并不断更新状态数据。
[0070]
步骤5,rsu模拟设备和待测obu进行信息交互。射频单元以无线传输方式广播盲区行人穿越信息。待测obu接收rsu信息发送的盲区行人信息,将盲区行人信息和自身状态信息发送给路径规划单元。路径规划单元计算测试车辆距离行人距离,相应改变测试车辆行驶速度。待测obu将测试车辆的速度、位置、方向等信息发送给rsu模拟设备。rsu模拟设备和待测obu信息交互的内容如表2所示。
[0071]
步骤6,当路径规划单元判断出盲区有行人进入时,且计算得到测试车辆距离人行横道线的距离少于50米时,提示测试车辆减速,路径规划单元将测试车辆速度逐渐降低,测试车辆在距离人行横道线3米前停止。当行人继续横穿至车道左侧约20cm外后,路径规划单元重新设置测试车辆速度,使测试车辆启动直到以原来车速行驶,并通过路口,直到测试结束。期间,数据存储器捕获并存储rsu模拟设备广播的rsu信息,以及存储待测obu发送给rsu模拟设备的实时状态数据。数据分析系统分析模拟场景测试中生成的数据,评估待测obu通信性能。
[0072]
表2盲区行人穿越预警rsu和obu4交互信息
[0073]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1