图像的共享方法、装置、电子设备及可读存储介质与流程
本发明实施例涉及互联网,特别是涉及一种图像的共享方法、一种图像的共享装置、一种电子设备以及一种计算机可读存储介质。
背景技术:
1、ros(robot operating system,机器人操作系统平台)作为一个开源的软件平台,被广泛应用于机器人系统的开发和控制。ros系统中可以包括若干的系统节点,通过ros系统中的系统节点可以实现对图像的处理,然后借助rviz(ros visualization,ros中的一种可视化工具)等工具将图像进行可视化。
2、然而,借助rviz可视化的图像的方法,无法进行跨端、远程访问,无法使用户能够轻松地查看和分析图像,并且在ros系统中处理图像,也会增加ros系统的负担,从而影响ros系统的整体性能。
技术实现思路
1、本发明实施例是提供一种图像的共享方法、装置、电子设备以及计算机可读存储介质,以解决通过ros系统处理图像,会增加ros系统的负担,从而影响ros系统的整体性能的问题。
2、本发明实施例公开了一种图像的共享方法,应用于网页端,所述网页端与机器人操作系统通过通信桥接器进行通信连接,所述机器人操作系统包括系统节点,所述系统节点至少包括相机节点和图像处理节点,所述相机节点与深度相机连接,所述方法包括:
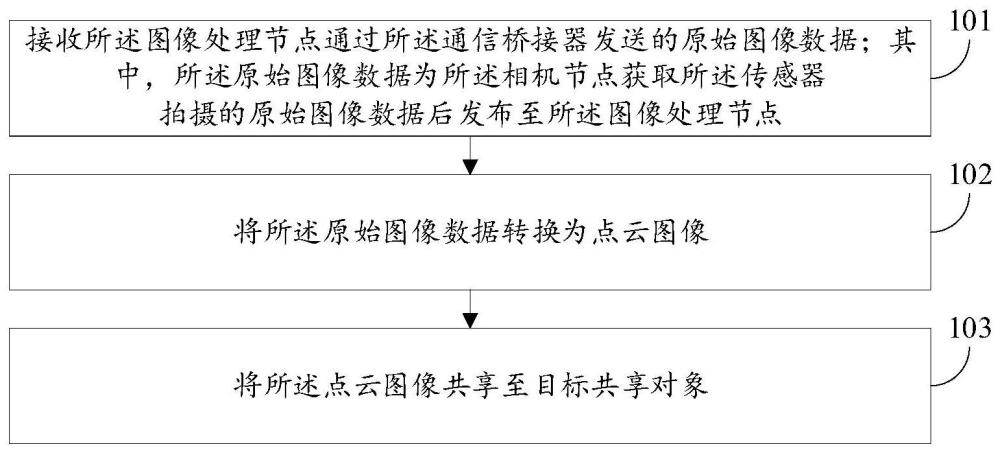
3、接收所述图像处理节点通过所述通信桥接器发送的原始图像数据;其中,所述原始图像数据为所述相机节点获取所述传感器拍摄的原始图像数据后发布至所述图像处理节点;
4、将所述原始图像数据转换为点云图像;
5、将所述点云图像共享至目标共享对象。
6、可选地,所述原始图像数据包括原始rgb图像数据和原始深度图像数据,所述将所述原始图像数据转换为点云图像,包括:
7、遍历所述原始深度图像数据和所述原始rgb图像数据中的每个像素,得到每个像素对应的三维坐标和rgb颜色值;
8、创建点云几何体和点云材质,将所述三维坐标和rgb颜色值添加到所述点云几何体得到目标点云几何体;
9、将所述目标点云几何体和目标点云材质组合为点云对象;
10、对所述点云对象进行渲染得到点云图像。
11、可选地,所述相机节点针对所述原始图像数据生成第一订阅链接并发布至所述图像处理节点,所述图像处理节点用于通过所述第一订阅链接获取所述原始图像数据。
12、可选地,所述图像处理节点用于将所述原始图像数据转换为指定格式的原始图像数据。
13、可选地,所述接收所述图像处理节点通过所述通信桥接器发送的原始图像数据,包括:
14、通过所述通信桥接器获取所述图像处理节点针对生成第二订阅链接;
15、通过所述第二订阅链接获取所述原始图像数据。
16、可选地,所述将所述点云图像共享至目标共享对象,包括:
17、确定针对所述点云图像的定制展示方式;
18、按照所述定制展示方式为所述目标共享对象展示所述点云图像。
19、可选地,所述点云图像为通过三维图像创建工具生成;所述三维图像创建工具至少包括three.js。
20、本发明实施例还公开了一种图像的共享装置,应用于网页端,所述网页端与机器人操作系统通过通信桥接器进行通信连接,所述机器人操作系统包括系统节点,所述系统节点至少包括相机节点和图像处理节点,所述相机节点与深度相机连接,所述装置包括:
21、发送模块,用于接收所述图像处理节点通过所述通信桥接器发送的原始图像数据;其中,所述原始图像数据为所述相机节点获取所述传感器拍摄的原始图像数据后发布至所述图像处理节点;
22、转换模块,用于将所述原始图像数据转换为点云图像;
23、共享模块,用于将所述点云图像共享至目标共享对象。
24、可选地,所述转换模块,用于
25、遍历所述原始深度图像数据和所述原始rgb图像数据中的每个像素,得到每个像素对应的三维坐标和rgb颜色值;
26、创建点云几何体和点云材质,将所述三维坐标和rgb颜色值添加到所述点云几何体得到目标点云几何体;
27、将所述目标点云几何体和目标点云材质组合为点云对象;
28、对所述点云对象进行渲染得到点云图像。
29、可选地,所述相机节点针对所述原始图像数据生成第一订阅链接并发布至所述图像处理节点,所述图像处理节点用于通过所述第一订阅链接获取所述原始图像数据。
30、可选地,所述图像处理节点用于将所述原始图像数据转换为指定格式的原始图像数据。
31、可选地,所述发送模块,用于:
32、通过所述通信桥接器获取所述图像处理节点针对生成第二订阅链接;
33、通过所述第二订阅链接获取所述原始图像数据。
34、可选地,所述共享模块,用于:
35、确定针对所述点云图像的定制展示方式;
36、按照所述定制展示方式为所述目标共享对象展示所述点云图像。
37、作为本发明的一种可选实施例,所述点云图像为通过三维图像创建工具生成;所述三维图像创建工具至少包括three.js。
38、本发明实施例还公开了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,所述处理器、所述通信接口以及所述存储器通过所述通信总线完成相互间的通信;
39、所述存储器,用于存放计算机程序;
40、所述处理器,用于执行存储器上所存放的程序时,实现如本发明实施例所述的方法。
41、本发明实施例还公开了一种计算机程序产品,该程序产品被存储在存储介质中,该计算机程序产品被至少一个处理器执行以实现如本发明实施例所述的方法。
42、本发明实施例还公开了一种计算机可读存储介质,其上存储有指令,当由一个或多个处理器执行时,使得所述处理器执行如本发明实施例所述的方法。
43、本发明实施例包括以下优点:
44、在本发明实施例中,应用于网页端,网页端与机器人操作系统通过通信桥接器进行通信连接,其中,机器人操作系统可以包括多个系统节点,系统节点至少可以包括相机节点和图像处理节点,相机节点与传感器连接,具体地,相机节点获取传感器拍摄的原始图像数据后发布至图像处理节点,然后,网页端接收图像处理节点通过通信桥接器发送的原始图像数据,并将原始图像数据转换为点云图像后共享至目标共享对象。本发明实施例机的机器人操作系统将原始图像数据传输到网页端,从而在网页端将原始图像数据融合生成点云图像并共享至目标共享对象,可以无需在机器人操作系统转换点云图像的过程,降低了机器人操作系统的负担,从而提高机器人操作系统的性能。此外,本发明实施例通过网页端来转换图像得到点云图像,使得用户可以减少机器人操作系统的相关软件安装的与系统环境的配置,并可以使用网页端通过网络远程访问点云图像,因此可以无需局限于运行机器人操作系统或计算机,具有跨平台、无需安装软件、实时性、数据安全性和协作共享的优势,为用户提供了更方便、高效的机器人操作系统的图像共享方式。
- 还没有人留言评论。精彩留言会获得点赞!