无人机辅助稳健隐蔽通信对抗主动检测者的设计方法
本发明属于无人机通信的安全传输领域,涉及无人机辅助稳健隐蔽通信对抗主动检测者的设计方案,具体是指在考虑主动检测者共谋和最差隐蔽约束下,通过联合无人机的发送功率和3d轨迹,最大化平均隐蔽速率。
背景技术:
1、随着第五代移动通信网络的部署和智能移动终端的发展,人们对提高无线通信性能的需求越来越迫切。然而,现有的地面通信在某些场景下不能满足全区域的覆盖或者提供可靠的传输,人们开始利用无人机等构建新的通信链路来辅助地面通信。由于无人机具有低成本、易操作和高灵活性等优势,在军事和民用领域得到了广泛应用。与地面通信相比,无人机灵活性更好,可以快速部署,还可以利用其高度更容易地建立短程视距链路。此外,由其移动性,可以通过无人机轨迹优化适应不同的信道条件,保障信息高效传输。
2、然而,由于空地无人机通信的视距链路和广播特点使得通信易被恶意者截获。作为一个新兴技术,物理层安全可以在无线通信中达到数据传输安全,但是该技术不适用于一些重要的场景,因为当通信被检测者检测到时会被检测或袭击。为了解决这个问题,隐蔽通信可以以极低的概率隐藏无线通信且不被检测者检测到。
3、检测者具有主动检测的特点,存在这样一种场景:主动检测者合作判断无线通信是否发生,进而增加无线通信被检测到的风险。为了增强通信系统的隐蔽性能,通过设计无人机的轨迹和发送功率可以保证数据通信的隐蔽性。
4、结合无人机的优点,本发明提出一种无人机辅助稳健隐蔽通信对抗主动检测者的设计方法,在满足最差隐蔽约束下,通过联合优化无人机的3d轨迹和发送功率,最大化平均隐蔽速率。
技术实现思路
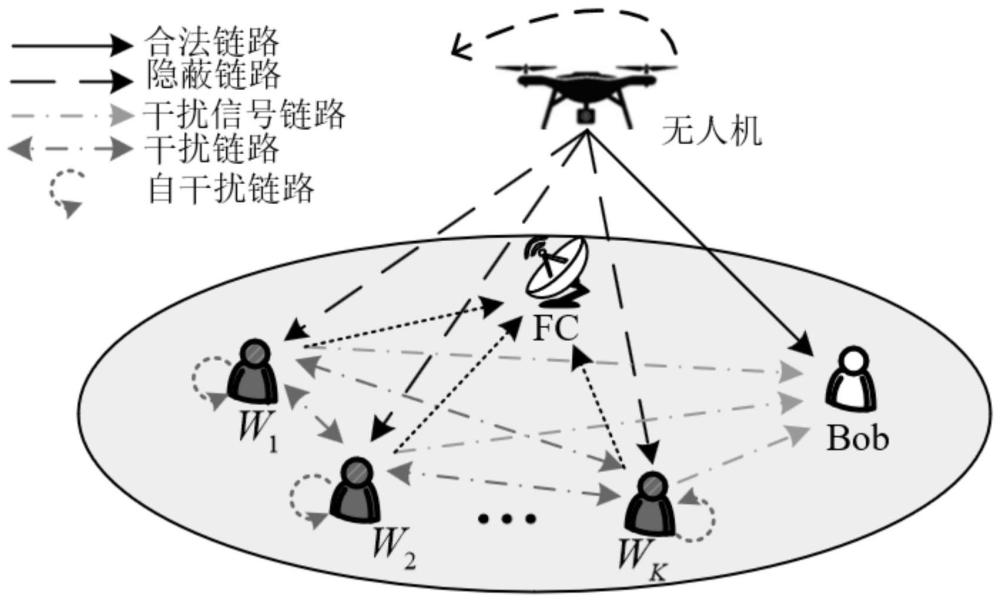
1、本发明的目的是为了解决无人机辅助的隐蔽通信对抗主动检测者,实现安全传输的问题。在网络模型中,无人机与地面用户视为视距链路,同时不能够获得主动检测者的准确位置,通过设计无人的轨迹来规避检测者以保证通信的隐蔽性。具体方案如示意图1所示。基于此模型本发明提供一种联合优化无人机的3d轨迹和发送功率,最大化平均隐蔽速率。
2、为达到上述技术目的,本发明采用的技术方案如下:
3、一种无人机辅助稳健隐蔽通信对抗主动监测者的设计方法,首先,考虑主动检测者存在的场景,建立无人机辅助稳健隐蔽通信对抗主动监测者的系统模型;其次,在最差隐蔽和检测者位置不确定约束下,联合优化无人机的三维(3d)轨迹和发送功率,构建无人机平均隐蔽速率最大化的优化问题;最后,将多变量耦合的原问题分解为两个子问题,利用块坐标下降,s-引理和连续凸近似等方法将非凸的优化问题转化为凸问题,并提出一个交替优化框架迭代求解,该优化方法能够以较低复杂度将两个非凸子问题转为凸问题,并得到一个次优解。包括以下步骤:
4、第一步,构建系统模型:
5、(1)建立一个无人机辅助稳健隐蔽通信对抗主动监测者系统,该系统包括一个单天线无人机作为发送端给地面单天线接收端bob发送保密信息,k个地面检测者,其中每一个检测者配备两根天线,一根接收无人机发送的信息,另一个产生干扰信号。其中,无人机与bob之间为合法链路,无人机与检测者之间为隐蔽链路,检测者与bob之间为发送干扰信号链路,检测者之间为干扰与自干扰链路。不失一般性,所有节点的位置采用3d笛卡尔坐标系表示,bob和第k个检测者(wk)的水平坐标分别为b=(xb,yb)t和wk=(xk,yk)t。假设无人机只能够获得检测者的不完美位置,则存在误差的wk估计位置为:
6、
7、其中,表示wk的评估位置;δek表示评估误差;φk表示不确定范围和rk表示不确定范围半径;r表示向量空间。
8、(2)假设无人机可以任意飞行,其对应的水平坐标为q[t]=(x[t],y[t])t,竖直坐标为h[t],其中0≤t≤t,飞行时间t均分为n个时隙,即δt=t/n,每个时隙非常小,使得uav在每个时隙的位置几乎不改变。则在第n个时隙与第n+1个时隙,uav的水平飞行距离为:
9、
10、其中,vmax为最大水平飞行速度;和为始末位置。uav竖直飞行高度为:
11、
12、其中,vz为最大竖直飞行速度;hi和hf为始末高度;hmin和hmax为最小和最大飞行高度;
13、(3)假设无人机悬停的足够高以避免碰撞,其到地面节点的空地信道主要包含视距分量,因此,从无人机到bob、wk的信道增益分别为:
14、
15、其中,β0表示单位距离的路径损耗。wk的发送天线和bob之间的信道经历瑞利衰落,则信道增益为:
16、
17、其中,dkb=||b-wk||表示wk与bob之间的欧氏距离;α为路径损耗指数;信道系数gkb遵循具有零均值和方差为1的复高斯分布小尺度瑞利衰落。由公式(1)可知,wk的准确位置不能获得,根据三角不等式,dkb可以表示为:
18、
19、其中,表示dkb的下界。
20、无人机在第n个时隙的发送功率为p[n],满足
21、
22、其中,和pmax分别表示平均发送功率和最大发送功率。因此,bob在第n个时隙接收到的信号为:
23、
24、其中,xb[n]为uav发送的信号;xk,j[n]为wk以最大发送功率pw发送的干扰信号,这两个信号都满足为期望算子;nb[n]为均值为0方差为的加性高斯白噪声。那么bob的可达速率为:
25、
26、因为rb[n]关于随机变量gkb[n]是凸的,则根据杰森不等式,rb[n]的下界可以表示为:
27、
28、其中,因此,可以用来衡量被主动检测者影响的隐蔽通信质量。
29、(4)假设每一个检测者有l次检测次数并告知融合中心其测量的能量。在这种情况下,每一个检测者使用同一码本发送干扰信号。假设wk通过自干扰消除技术能够尽可能完全消除自干扰以及来自其他检测者的干扰,则wk在第n个时隙接受到的第l次信号为:
30、
31、其中,h0表示零假设,即uav不发送保密信号;h1表示备选假设,即uav发送保密信号;nk为均值为0、方差为的加性高斯白噪声。考虑最坏的情况,主动检测者合作进行检测。为了判断无人机和bob之间是否存在通信,所有的检测者将接受到的第l次信号能量传送给融合中心,则融合中心接收到的检测能量可以表示为:
32、
33、其中,表示噪声功率之和;表示融合中心接收到的功率增益之和;虚警概率和漏检概率可以分别表示为pfa[n]=(d1∣h0)和pmd[n]=(d0∣h1),其中d0表示融合中心认为无人机没有发送信号和d1表示融合中心认为无人机发送了信号。因此,检错概率可以表示为利用似然比最小化ξk[n]为:
34、
35、其中,和分别为h0和h1的似然函数。利用统计决策理论,最优检测门限为:
36、
37、其中,和分别表示为不完全伽马函数和伽马函数,其中的t表示随机变量;为了保证隐蔽通信,则有:
38、
39、其中,ε∈[0,1]表示隐蔽水平门限。
40、第二步,确定目标函数和优化变量,形成优化问题;
41、为了易于表达,另p=[p[1],...,p[n]]t,q=[q[1],...,q[n]]t和h=[h[1],...,h[n]]t。通过联合优化无人机的3d轨迹和发送功率,最大化平均隐蔽速率,形成如下的优化问题:
42、
43、其中,c1-c4为无人机的移动约束,c5表示无人机发送功率约束,c6是隐蔽约束。可以看出c6关于p、q和h是非凸约束,可以获得这意味着ξ[n]是μ2[n]的非增函数,因此存在一个μ2[n]的最大值能够满足c6,可以通过二分搜索法得到。则c6可以重写:
44、
45、第三步,设计算法求解优化问题:
46、采用分块迭代的思想,将上述优化问题分解为两个子问题;具体来说,首先给定无人机的飞行轨迹,将发送功率子问题转化为一个凸问题;然后引入辅助变量将原问题转化为半定规划,利用半定松弛、s-引理和一阶泰勒展开求解无人机飞行轨迹。具体包括以下步骤:
47、(1)无人机发送功率的优化
48、固定无人机的轨迹q和h,子问题可以表示为:
49、
50、约束(17)可以进一步表示为:
51、
52、其中,
53、
54、在(20)中,因此,(p1.1a)可以重构为:
55、
56、公式(21)所示的约束是凸的并且能够通过传统的cvx求解;
57、(2)无人机3d轨迹的优化
58、在给定发送功率p的情况下,无人机3d轨迹可以表示为:
59、
60、由于目标函数和约束(17),则该子问题是非凸的。为了解决该问题,引入松弛变量θ={θ[n]}和则(p1.2a)可以重构为:
61、
62、其中,表示平均隐蔽速率的下界;θm[n]为第m次迭代的可行解。利用s-引理,c9可以表示为:
63、
64、其中,是非凸的,||q[n]-b||2和h2[n]是非线性的。那么,(p1.2b)可以重构为:
65、
66、其中,(p1.2c)是凸的且能够利用cvx可以高效地求解;
67、(3)通过交替迭代算法来求解优化问题,在每次迭代中,利用半定松弛和连续凸逼近求解无人机的发送功率和3d轨迹,进而最大化平均隐蔽速率;最后更新参变量的值进行下一次迭代,直至最后算法收敛;具体流程如下:
68、1)初始化无人机的水平位置q0和高度h0,迭代次数m=0,迭代终止阈值ε0;
69、2)对于给定的q(m)和h(m),求解凸优化问题(p1.1b)得到第k次迭代的优化结果,即无人机发送功率p(m+1),作为第m+1迭代的初始值;
70、3)对于给定的p(m+1),求解凸优化问题(p1.2c),从而得到q(m+1)和h(m+1),更新迭代次数m=m+1;
71、4)计算经此次迭代后,问题(p1)目标值的增加量,若大于阈值ε0,则更新迭代次数m=m+1,跳至步骤2)进行下一次的迭代优化;若优化目标值增加量小于阈值ε0,则终止迭代,输出相对应的优化变量的值。
72、本发明主要分析存在多个检测者发送干扰信号且共谋的场景,为了使得平均隐蔽速率最大化,通过对无人机轨迹和发送功率迭代优化,设计出无人机的轨迹和发送功率在规避检测者的同时建立更好的空地链路,以增强通信质量。
73、本发明的有益效果是:
74、本发明通过对无人机的发送功率和3d轨迹的联合优化设计,给出了在满足隐蔽通信的同时实现平均隐蔽速率最大化的对抗主动检测方案。通过设计无人机的3d轨迹,在保证通信隐蔽的情况下,使得平均隐蔽速率最大化。本发明为实现无人机通信隐蔽传输给出了参考取值方法。
- 还没有人留言评论。精彩留言会获得点赞!