一种巡逻警车一体化管理系统及方法与流程
本发明涉及大数据应用领域,尤其涉及一种巡逻警车一体化管理系统及方法。
背景技术:
1、公安系统具有工作移动性、突发性、紧急性强的特点,一线部门需要随时与公安数据中心进行实时信息交换,对常住人口、暂住人口、车辆等各种信息进行及时、迅速的查询,特别是视频和相关图片的传输应用,能够极大的提高公安人员的办案效率。
2、故需特别开发适用于突发性事件或其它特殊情况的现场处理及控制时,需要实时而迅速地传回指挥中心的管理系统的情况。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供一种巡逻警车一体化管理系统及方法,实现将现场情况及时传回指挥中心,便于远程指挥和调度,降低危险性,极大地缩短反应时间。
2、为实现上述目的,本发明采用以下技术方案:
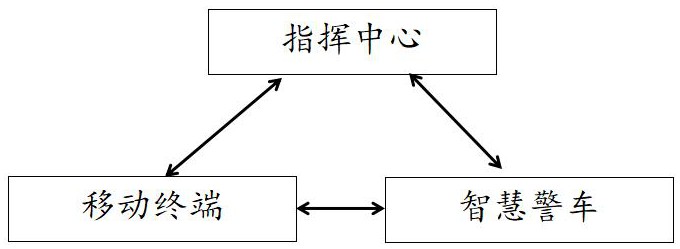
3、一种巡逻警车一体化管理系统,包括指挥中心、移动终端和智慧警车;所述指挥中心接到群众报警电话,报警信息录入后派发给移动终端;派出所民警的移动终端接收到警情短信后,启动智慧警车,根据导航路线行驶到案发地点;在车辆行驶过程中,指挥中心会根据智慧警车实时定位和地址信息、报警地点匹配,匹配成功后,后台引擎自动签到,并完成到场确认;同时将智慧警车的实时位置及行驶路线在指挥中心的可视化模块上进行显示。
4、进一步的,所述智慧警车设有数据采集单元、数据分析单元和通信单元;所述数据采集单元实时采集巡逻数据,包括位置信息、视频、音频;所述数据分析单元对采集到的巡逻数据进行实时处理和分析,包括位置信息的地图显示、视频的实时监控、音频的语音识别,并将处理后的数据通过通信单元传输到指挥中心以可视化的方式展示,包括地图展示巡逻路线、视频实时监控画面。
5、进一步的,所述数据采集单元包括设于巡逻警车内的抓拍主机、车内摄像机、人脸签到摄像头、电台、设于巡逻警车顶部的云台摄像机以及设于人员身上的执法仪。
6、进一步的,所述数据分析单元对采集到的巡逻数据进行实时处理和分析,具体如下:
7、(1)使用地理信息系统技术,将采集到的位置信息转换为地理坐标,并在地图上进行实时显示;
8、利用地图api获取地图数据,并将位置信息标记在地图上;
9、(2)使用视频流处理技术,将采集到的视频数据进行实时传输和处理;
10、利用视频编解码器对视频进行压缩和解压缩,以减少带宽和存储需求;
11、使用实时流媒体传输协议将视频流传输到后台服务器,并在前端应用中进行实时播放和监控;
12、(3)使用语音识别技术,将采集到的音频数据转换为文本信息;
13、利用语音识别引擎对音频进行实时识别和转录;
14、将识别结果与巡逻任务相关联,以提取关键信息和进行后续分析。
15、进一步的,所述使用地理信息系统技术,将采集到的位置信息转换为地理坐标,并在地图上进行实时显示,具体如下:
16、根据报警信息,获取路线数据,包括起点、终点和途经点的位置信息,并将位置信息(x, y)转换为经纬度坐标(lat, lon)的公式如下:
17、lat = y * (lat_max - lat_min) / (y_max - y_min) + lat_min
18、lon = x * (lon_max - lon_min) / (x_max - x_min) + lon_min
19、其中,(x_min, y_min)和(x_max, y_max)分别表示采集到的位置信息的最小值和最大值,(lat_min, lon_min)和(lat_max, lon_max)分别表示经纬度范围的最小值和最大值;
20、基于地图api,注册并获取api密钥,在指挥中心的可视化模块中引入地图api,并创建地图容器,用于展示地图;
21、根据api文档,将地图显示在页面上,并设置地图的中心点和缩放级别。
22、在地图上添加标记点,展示相关信息的位置;
23、根据路线数据,使用地图api提供的绘制工具,将路线以线段或路径的形式绘制在地图上;
24、基于websocket实时获取警员位置数据,并在地图上实时更新。
25、进一步的,将视频数据进行实时传输和处理,具体如下:
26、使用视频编解码器h.264对实时监控视频流进行解码,对解码后的视频帧进行实时处理,包括使用卷积运算对视频帧进行滤波,使用sobel算子对视频帧进行边缘检测以及基于卷积神经网络进行目标检测;
27、边缘检测算子的公式表示为:
28、 水平边缘强度 = ∑(输入像素值 * sobel水平算子)
29、 垂直边缘强度 = ∑(输入像素值 * sobel垂直算子)
30、 边缘强度 = sqrt(水平边缘强度^2 + 垂直边缘强度^2)
31、并采用图像合成技术将处理后的视频帧与地图进行叠加显示。
32、进一步的,所述图像合成技术,具体为:
33、使用地图api,根据经纬度和缩放级别等参数,获取地图的静态图像;
34、根据地图的静态图像的尺寸,调整视频帧的大小和位置,使其与地图的静态图像相匹配;
35、并基于透明度混合方法,将处理后的视频帧与地图的静态图像进行叠加显示;
36、所述透明度混合的公式表示为:
37、输出像素值 = (1 - 透明度) * 静态图像像素值 + 透明度 * 视频帧像素值。
38、进一步的,所述基于卷积神经网络进行目标检测,具体如下:
39、(1)对于第一帧检测到的人和车目标,使用基于卡尔曼滤波器进行跟踪:
40、a在第一帧中,选择人和车的初始位置作为目标模板;
41、b在后续帧中,将目标模板与当前帧进行相关运算,得到相关响应图;
42、c根据相关响应图,选择最大响应值对应的位置作为目标的预测位置;
43、d更新目标模板,将当前帧中的目标位置作为新的目标模板。
44、(2)在每一帧中,根据目标跟踪的结果,将目标的位置信息传递给目标检测算法,用于更新目标检测的模型;
45、(3)将目标检测和跟踪的结果叠加到视频流中,通过绘制边界框,将检测到的目标显示在视频流中。
46、一种巡逻警车一体化管理方法,包括以下步骤:
47、步骤s1:指挥中心接到群众报警电话,报警信息录入后派发给移动终端;
48、步骤s2:派出所民警的移动终端接收到警情短信后,启动智慧警车,根据导航路线行驶到案发地点;
49、步骤s3:在车辆行驶过程中,指挥中心会根据智慧警车实时定位跟地址信息、报警地点匹配,匹配成功后,后台引擎自动签到,并完成到场确认;同时将智慧警车的实时位置及行驶路线在指挥中心的可视化模块上进行显示;
50、步骤s4:到场确认后,根据智慧警车的数据采集单元,采集巡逻数据,包括位置信息、视频、音频;
51、步骤s5:基于巡逻数据,进行数据分析,包括位置信息的地图显示、视频的实时监控、音频的语音识别,并将处理后的数据通过通信单元传输到指挥中心以可视化的方式展示,包括地图展示巡逻路线、视频实时监控画面。
52、本发明具有如下有益效果:
53、1、本发明实现将现场情况及时传回指挥中心,便于远程指挥和调度,降低危险性,极大地缩短反应时间;
54、2、本发明基于智慧警车实时定位跟地址信息、报警地点匹配,匹配成功后,后台引擎自动签到,并完成到场确认;同时将智慧警车的实时位置及行驶路线在指挥中心的可视化模块上进行显示,有效提高出警效率。
- 还没有人留言评论。精彩留言会获得点赞!