一种末端减速机动控制方法
1.本发明涉及一种末端减速机动控制方法,属于飞行器控制 领域。
背景技术:
2.随着火箭弹武器系统的不断发展,火箭弹的突防问题变得 越来越重要。为了增加对火箭弹的拦截难度,提高火箭弹的突 防能力,火箭弹需要进行末端机动控制。
3.目前常用的末端机动控制方法采用以最大过载不变的机动 控制方式,不具有灵活性,实物机构也难以完成任务要求。
4.此外,常规的末端机动控制方法未考虑原有过载指令与机 动过载指令的叠加,在工程上实用性差。
5.由于上述原因,本发明人对现有的飞行器末端机动控制方 法进行了研究,以期解决上述问题。
技术实现要素:
6.为了克服上述问题,本发明人进行了锐意研究,提出了一 种末端减速机动控制方法,通过当前速度与期望落速装订的相 对误差及误差变化率确定附加减速机动指令,进而将附加减速 机动指令与原始制导控制侧向指令相叠加,得到合成控制指令。
7.根据本发明,该方法包括以下步骤:
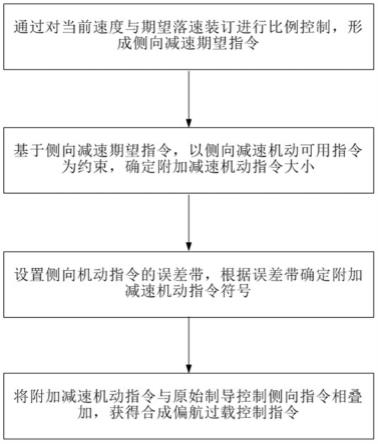
8.s1、通过对当前速度与期望落速装订进行比例控制,形成 侧向减速期望指令;
9.s2、基于侧向减速期望指令,以侧向减速机动可用指令为 约束,确定附加减速机动指令大小;
10.s3、设置侧向机动指令的误差带,根据误差带确定附加减 速机动指令符号;
11.s4、将附加减速机动指令与原始制导控制侧向指令相叠加, 获得合成偏航过载控制指令。
12.在步骤s1中,根据当前速度和期望落速装订,可获得侧向 速度变化率指令dv
z0
:
13.dv
z0
=vc*k1+(a
xb-dvc)*k214.其中,vc为速度指令,a
xb
为火箭弹轴向过载,k1、k2为比例 系数,dvc为速度变化率指令;
15.速度指令vc和速度变化率指令dvc可以表示为:
16.vc=v-v
impact
[0017][0018]
其中,v表示火箭弹当前速度,v
impact
表示期望落速装订,t
go
表示剩余飞行时间。
[0019]
在一个优选的实施方式中,采用指令平滑滤波器平滑侧向 速度变化率指令dv
z0
,从而获得经过平滑后的侧向减速期望指令 dv
z1
,可以表示为:
[0020][0021]
其中,t为平滑滤波器时间常数,s表示传递函数复变量。
[0022]
根据本发明,在步骤s2中,所述侧向减速机动可用指令可 以表示为:
[0023]az_valid
=|a
zmax
|-|a
zc0
|
ꢀꢀꢀꢀꢀ
(5)
[0024]
其中,a
z_valid
为侧向减速机动可用指令,a
zmax
为侧向最大可 用过载指令,a
zc0
为原始制导控制回路侧向过载指令,
[0025]
将侧向减速期望指令dv
z1
与侧向减速机动可用指令a
z_valid
进 行比较,确定侧向减速机动可用指令a
z_valid
的大小,确定后的 a
z_valid
大小即为附加减速机动指令大小。
[0026]
进一步地,当a
z_valid
≥dv
z1
时,a
z_valid
=dv
z1
;
[0027]
当a
z_valid
<dv
z1
时,a
z_valid
=0。
[0028]
根据本发明,在步骤s3中,通过设置侧向机动指令的误差 带调整侧向减速期望指令dv
z1
的方向,所述侧向机动指令的误差 带设置如下:
[0029]
当飞行器沿负z轴运动到z<-r
*
时,改变火箭弹的机动方向, 使其侧向速度变化率指令变为沿正z轴,即dv
z1
=a
z_valid
;
[0030]
当飞行器沿正z轴运动到z>r
*
时,改变火箭弹的机动方向, 使其侧向速度变化率指令变为沿负z轴,即dv
z1
=-a
z_valid
。
[0031]
其中,r
*
表示误差带的宽度。
[0032]
优选地,误差带的宽度r
*
的取值为:50m≤r
*
≤70m。
[0033]
根据本发明一个优选的实施方式,对侧向减速期望指令dv
z1
进行平滑处理,获得附加减速机动指令dv
′z,可以表示为:
[0034]
dv
′z=dv
z1
*k
turning2
+(1-k
turning2
)*dv
′
z1
[0035][0036]
其中,k
turning
为比例系数,ts为时间系数,t
turning
为当前单一 侧向方向机动周期时间,dv
′
z1
表示上一状态中的侧向速度变化率 指令dv
z1
,所述上一状态为调整侧向速度变化率指令方向前火箭 弹所处的状态。
[0037]
在步骤s4中,所述合成偏航过载控制指令可以表示为:
[0038]azc
=a
zc0
+dv
′z[0039]
其中,a
zc
为合成偏航过载控制指令,a
zc0
表示原始制导控制 回路侧向过载指令,dv
′z表示附加减速机动指令。
[0040]
本发明所具有的有益效果包括:
[0041]
(1)根据本发明提供的一种末端减速机动控制方法,解 决了目前火箭弹末端机动方案的灵活性问题和过载指令合成的 问题。
[0042]
(2)根据本发明提供的一种末端减速机动控制方法,在 机动指令符号发生改变时加入平滑机构,更好的适应实物机构 的工作性能。
[0043]
(3)根据本发明提供的一种末端减速机动控制方法,末 端机动灵活性高,突防效果更佳。
附图说明
[0044]
图1示出根据本发明一种优选实施方式的末端减速机动控 制方法示意图;
[0045]
图2示出根据本发明实施例1中获得的合成偏航过载控制 指令仿真图;
[0046]
图3示出根据本发明实施例1中火箭弹最终轨迹仿真图。
具体实施方式
[0047]
下面通过附图和实施例对本发明进一步详细说明。通过这 些说明,本发明的特点和优点将变得更为清楚明确。
[0048]
在这里专用的词“示例性”意为“用作例子、实施例或说 明性”。这里作为“示例性”所说明的任何实施例不必解释为优 于或好于其它实施例。尽管在附图中示出了实施例的各种方面, 但是除非特别指出,不必按比例绘制附图。
[0049]
本发明提供的一种末端减速机动控制方法,通过当前速度 与期望落速装订的相对误差及误差变化率确定附加减速机动指 令,进而将附加减速机动指令与原始制导控制侧向指令相叠加, 得到合成控制指令。
[0050]
具体地,该方法包括以下步骤,如图1所示:
[0051]
s1、通过对当前速度与期望落速装订进行比例控制,形成 侧向减速期望指令;
[0052]
s2、基于侧向减速期望指令,以侧向减速机动可用指令为 约束,确定附加减速机动指令大小;
[0053]
s3、设置侧向机动指令的误差带,根据误差带确定附加减 速机动指令符号;
[0054]
s4、将附加减速机动指令与原始制导控制侧向指令相叠加, 获得合成偏航过载控制指令。
[0055]
在步骤s1中,根据当前速度和期望落速装订,可获得侧向 速度变化率指令dv
z0
:
[0056]
dv
z0
=vc*k1+(a
xb-dvc)*k2ꢀꢀꢀꢀꢀ
(1)
[0057]
其中,vc为速度指令,a
xb
为火箭弹轴向过载,k1、k2为比例 系数,dvc为速度变化率指令。
[0058]
进一步地,速度指令vc和速度变化率指令dvc可以表示为:
[0059]
vc=v-v
impact
ꢀꢀꢀꢀꢀꢀ
(2)
[0060][0061]
其中,v表示火箭弹当前速度,v
impact
表示期望落速装订,t
go
表示剩余飞行时间。
[0062]
在一个优选的实施方式中,所述侧向速度变化率指令dv
z0
的 最大值为15.0m/s2,最小值为0.5m/s2。
[0063]
在本发明中,采用指令平滑滤波器平滑侧向速度变化率指 令dv
z0
,从而获得经过平滑后的侧向减速期望指令dv
z1
,可以表 示为:
[0064][0065]
其中,t为平滑滤波器时间常数,s表示传递函数复变量。
[0066]
在步骤s2中,所述侧向减速机动可用指令可以表示为:
[0067]az_valid
=|a
zmax
|-|a
zc0
|
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0068]
其中,a
z_valid
为侧向减速机动可用指令,a
zmax
为侧向最大可 用过载指令,a
zc0
为原始制导控制回路侧向过载指令。
[0069]
进一步地,将侧向减速期望指令dv
z1
与侧向减速机动可用指 令a
z_valid
进行比较,确定侧向减速机动可用指令a
z_valid
的大小,确 定后的a
z_valid
大小即为附加减速机动指令大小。
[0070]
具体地,当a
z_valid
≥dv
z1
时,表明控制机构能够完成减速机动 控制,则有:a
z_valid
=dv
z1
;
[0071]
当a
z_valid
<dv
z1
时,表明控制机构不足以完成减速机动控制, 则有:a
z_valid
=0。
[0072]
在常规情况下,当火箭弹沿负z轴机动时,dv
z1
=-a
z_valid
;
[0073]
当火箭弹沿负z轴机动时,dv
z1
=a
z_valid
;
[0074]
其中,dv
z1
表示侧向减速期望指令,a
z_valid
表示侧向减速机 动可用指令。
[0075]
根据本发明,在步骤s3中,通过设置侧向机动指令的误差 带调整侧向减速期望指令dv
z1
的方向,使得火箭弹在突防过程中 轨迹出现扭曲,以干扰防御系统对火箭弹轨迹的判断,从而诱 导防空武器出现攻击偏差。
[0076]
在一个优选的实施方式中,所述侧向机动指令的误差带设 置如下:
[0077]
当飞行器沿负z轴运动到z<-r
*
时,改变火箭弹的机动方向, 使其侧向速度变化率指令变为沿正z轴,即dv
z1
=a
z_valid
;
[0078]
当飞行器沿正z轴运动到z>r
*
时,改变火箭弹的机动方向, 使其侧向速度变化率指令变为沿负z轴,即dv
z1
=-a
z_valid
。
[0079]
其中,r
*
表示误差带的宽度,通过上述方式获得的dv
z1
即为 理想速度变化率指令,dv
z1
的符号即为附加减速机动指令符号。
[0080]
在一个更优选的实施方式中,50m≤r
*
≤70m,更优选为60m, 发明人发现,若r
*
取值过小,无法达到干扰防御系统对火箭弹 轨迹的判断的效果;若r
*
取值过大,则燃料耗费过多,且超出 过载限制,火箭弹控制平稳性降低。
[0081]
在一个优选的实施方式中,对侧向减速期望指令dv
z1
进行平 滑处理,获得附加减速机动指令dv
′z,可以表示为:
[0082]
dv
′z=dv
z1
*k
turning2
+(1-k
turning2
)*dv
′
z1
ꢀꢀꢀꢀꢀꢀꢀ
(6)
[0083][0084]
其中,k
turning
为比例系数,ts为时间系数,t
turning
为当前单一 侧向方向机动周期时间,dv
′
z1
表示上一状态中的侧向速度变化率 指令dv
z1
,所述上一状态是指调整侧向速度变化率指令方向前, 火箭弹所处的状态。
[0085]
在步骤s4中,所述合成偏航过载控制指令可以表示为:
[0086]azc
=a
zc0
+dv
′zꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0087]
其中,a
zc
为合成偏航过载控制指令,a
zc0
表示原始制导控制 回路侧向过载指令,dv
′z表示附加减速机动指令。
[0088]
进一步地,火箭弹可承受过载最大值表示为a
zmax
,最小值 表示为-a
zmax
,
[0089]
当合成偏航过载控制指令a
zc
大于a
zmax
时,a
zc
=a
zmax
;
[0090]
当合成偏航过载控制指令a
zc
小于-a
zmax
时,a
zc
=-a
zmax
,以避 免合成的过载控制指令超出火箭弹承受范围造成火箭弹控制失 衡。
[0091]
实施例
[0092]
实施例1
[0093]
进行仿真实验,火箭弹初速度设定为0m/s、期望落速装订 为281m/s,火箭弹轴向过载a
xb
=-4m/s2,比例系数k1、k2设定为 0.5、0.5,
[0094]
在步骤s1中,根据当前速度和期望落速装订,可获得侧向 速度变化率指令dv
z0
:
[0095]
dv
z0
=vc*k1+(a
xb-dvc)*k2ꢀꢀꢀꢀꢀꢀꢀ
(1)
[0096]
速度指令vc和速度变化率指令dvc可以表示为:
[0097]
vc=v-v
impact
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0098][0099]
采用指令平滑滤波器平滑侧向速度变化率指令dv
z0
,从而获 得经过平滑后的侧向减速期望指令dv
z1
,可以表示为:
[0100][0101]
其中,平滑滤波器时间常数t取值为0.8,
[0102]
在步骤s2中,所述侧向减速机动可用指令可以表示为:
[0103]az_valid
=|a
zmax
|-|a
zc0
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0104]
当a
z_valid
>dv
z1
时,表明控制机构能够完成减速机动控制,则 有:a
z_valid
=dv
z1
;
[0105]
当a
z_valid
<dv
z1
时,表明控制机构不足以完成减速机动控制, 则有:a
z_valid
=0。
[0106]
在步骤s3中,通过设置侧向机动指令的误差带调整侧向速 度变化率指令dv
z1
的方向,所述侧向机动指令的误差带设置如下:
[0107]
当飞行器沿负z轴运动到z<-60m时,改变火箭弹的机动方 向,使其侧向速度变化率指令变为沿正z轴,即dv
z1
=a
z_valid
;
[0108]
当飞行器沿正z轴运动到z>60m时,改变火箭弹的机动方向, 使其侧向速度变化率指令变为沿负z轴,即dv
z1
=-a
z_valid
。
[0109]
对侧向减速期望指令dv
z1
进行平滑处理,获得附加减速机动 指令dv
′z,可以表示为:
[0110]
dv
′z=dv
z1
*k
turning2
+(1-k
turning2
)*dv
′
z1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0111][0112]
在步骤s4中,所述合成偏航过载控制指令可以表示为:
[0113]azc
=a
zc0
+dv
′zꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0114]
其中,a
zc
为合成偏航过载控制指令,a
zc0
表示原始制导控制 回路侧向过载指令,dv
′z表示附加减速机动指令。
[0115]
当合成偏航过载控制指令a
zc
大于a
zmax
时,a
zc
=a
zmax
;
[0116]
当合成偏航过载控制指令a
zc
小于-a
zmax
时,a
zc
=-a
zmax
。
[0117]
获得的合成偏航过载控制指令a
zc
如图2所示。
[0118]
火箭弹最终轨迹如图3所示,从图上可以看出经过设计后 火箭弹的过载指令随时间发生变化,增加了火箭弹的灵活性, 提高了突防能力。
[0119]
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、
ꢀ“
外”、“前”、“后”等指示的方位或位置关系为基于本发明工 作状态下的方位或位置关系,仅是为了便于描述本发明和简化 描述,而不是指示或暗示所指的装置或元件必须具有特定的方 位、以特定的方位构造和操作,因此不能理解为对本发明的限 制。此外,术语“第一”、“第二”、“第三”、“第四”仅用于描 述目的,而不能理解为指示或暗示相对重要性。
[0120]
在本发明的描述中,需要说明的是,除非另有明确的规定 和限定,术语“安装”“相连”“连接”应作广义理解,例如, 可以是固定连接,也可以是可拆卸连接,或一体的连接普通; 可以是机械连接,也可以是电连接;可以是直接连接,也可以 通过中间媒介间接连接,可以是两个元件内部的连通。对于本 领域的普通技术人员而言,可以具体情况理解上述术语在本发 明中的具体含义。
[0121]
以上结合了优选的实施方式对本发明进行了说明,不过这 些实施方式仅是范例性的,仅起到说明性的作用。在此基础上, 可以对本发明进行多种替换和改进,这些均落入本发明的保护 范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1