一种炮架自动调节系统
1.本实用新型涉及自动调节技术领域,尤其涉及一种炮架自动调节系统。
背景技术:
2.在现有技术的炮架中,82式无后坐力炮作为因地形复杂,难以放置爆炸物的任务情况中首选的远距离爆破工具之一,为武警部队完成抢险救援任务做出杰出贡献。但是,武警部队常用的82式无后坐力炮仍然存在很多如复杂地形架设慢、多人架设废人力、专业人士难培养的等不足,且严重影响不对在分秒必争的抢险救援行动中的速度。
技术实现要素:
3.本实用新型的目的在于提供一种炮架自动调节系统,通过在炮架上设置加速度传感器模块以及电子罗盘传感器模块对炮架的倾斜角度以及方向角进行实时检测,实现了对炮架自动检测并且根据显示模块现实的数据,可以进行实时调节。
4.本实用新型通过下述技术方案实现:
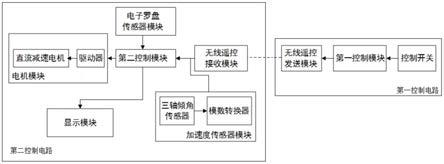
5.一种炮架自动调节系统,用于炮架上,包括第二控制电路,所述第二控制电路包括第二控制模块、加速度传感器模块、电子罗盘传感器模块以及显示模块;所述加速度传感器模块的输出端与所述第二控制模块的输入端连接;所述电子罗盘传感器模块的输出端与所述第二控制模块的输入端连接;所述第二控制模块的输出端与所述显示模块的输入端连接;
6.所述加速度传感器模块用于测量炮架的倾斜角度;
7.所述电子罗盘传感器模块用于测量炮架的方向角;
8.所述显示模块用于实时显示所述加速度传感器模块测量的炮架的倾斜角度以及所述电子罗盘传感器模块测量的炮架的方向角。
9.传统的在对炮架的倾斜角度以及方向角进行调整的时候,均是采用操作人员的认为经验对炮架进行调整,但是往往采用这种方法使用炮架的时候,需要对操作人员进行大量的培训,培训需要花费大量的时间、精力;采用本实用新型提供的一种炮架自动调节系统,通过设置加速度传感器模块检测炮架的倾斜角度,设置电子罗盘传感器模块检测炮架的方向角,且将倾斜角度与方向角实时显示在显示模块上,实现了操作人员更为简便的调节炮架的倾斜角度以及方向角,且不再通过人为观察实现炮架的调节,节约了调节的时间。
10.优选地,所述第二控制模块为单片机,且所述单片机的sdai端口与所述电子罗盘传感器模块的sdai端口连接,所述单片机的scli端口与所述电子罗盘的scli端口连接;所述单片机的scl端口与所述加速度传感器模块的scl端口连接,所述单片机的sda端口与所述加速度传感器模块的sda端口连接。
11.优选地,所述加速度传感器模块包括三轴倾角传感器与模数转换器,所述三轴倾角传感器的第4端口与所述模数转换器的ain0端口连接,所述三轴倾角传感器的第3端口与所述模数转换器的ain1端口连接,所述三轴倾角传感器的第2端口与所述模数转换器的
ain2 端口连接,所述模数装换器的scl端口与所述第二控制模块的scl端口连接,所述模数转换器的sda端口与所述第二控制模块的sda端口连接。
12.在加速度传感器模块中设置三轴倾角传感器,其具有较高的分辨率、可变的量程、较高的灵敏度以及较低的功耗,实现了对角度的精准测量。
13.优选地,所述调节系统还包括无线遥控接收模块、电机模块以及第一控制电路,所述无线遥控接收模块的输出端与所述第二控制模块的输入端连接;所述第二控制模块的输出端与所述电机模块连接;
14.所述第一控制电路用于向所述无线遥控接收模块发送指令信号;
15.所述无线遥控接收模块用于接收指令信号,并将该指令信号传输到所述第二控制模块上;
16.所述第二控制模块接收指令信号后,用于控制所述电机模块;
17.所述电机模块用于对炮架旋转丝杆的方向进行调整。
18.优选地,所述第一控制电路包括第一控制模块、无线遥控发送模块以及控制开关;所述控制开关用于控制所述第一控制模块发送的指令信号;所述第一控制模块通过所述无线遥控发送模块向所述第二控制单元发送指令信号。
19.优选地,所述电机模块包括直流减速电机与驱动器,所述驱动器的第8端口与所述直流减速电机的正极连接,所述驱动器的第5端口与所述直流减速电机的负极连接;所述电机模块的第二端口与所述第二控制模块的p1.0端口连接。
20.直流减速电机能提供较大的力矩。
21.优选地,所述第一控制电路设置的控制开关的数量与炮架的支脚数量相匹配,且所述第二控制模块连接的所述电机模块的数量与炮架支脚的数量相匹配。
22.设置的控制开关数量与电机模块设置数量均与炮架支教相匹配,主要是通过设置的控制开关对应发送的一个信号去控制一个电机模块;通过控制开关的闭合与开启的状态,用于控制第一控制模块向第二控制单元发送对炮架某个支脚进行调节的信号。
23.优选地,所述单片机的型号为stc89c51rc;所述加速度传感器模块的型号为加速度传感器adxl345芯片;所述电子罗盘传感器模块的型号为hmc5883l;所述显示模块为 lcd1602液晶显示器。
24.优选地,所述驱动器型号为l9110s
25.l9110s是一个两通道推挽式功率放大专用集成电路器件,是为了驱动和控制电机而设计的。
26.本实用新型与现有技术相比,具有如下的优点和有益效果:
27.1、通过本技术提供的一种炮架自动调节系统,通过将炮架的倾斜角度以及方向角实时显示在显示模块上,实现了对炮架的精准调节,且不在需要人为经验对炮架的倾斜角以及方向角进行实时调节;
28.2、通过本技术提供的一种炮架自动调节系统,通过设置电机模块,可以实现对炮架的支撑脚的自动调节控制,让部队在抢险救援开道清障的任务中更加快速、方便地完成,且减少培训专业操作人员所需的精力时间。
附图说明
29.此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本技术的一部分,并不构成对本实用新型实施例的限定。在附图中:
30.图1为本实用新型结构示意图;
31.图2为第二控制电路连接示意图;
32.图3为第一控制电路连接示意图;
33.图4为加速度传感器模块连接示意图;
34.图5为电机模块连接示意图。
具体实施方式
35.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
36.实施例一
37.本实施例公开了一种炮架自动调节系统,用于炮架上,包括第二控制电路,所述第二控制电路包括第二控制模块、加速度传感器模块、电子罗盘传感器模块以及显示模块;所述加速度传感器模块的输出端与所述第二控制模块的输入端连接;所述电子罗盘传感器模块的输出端与所述第二控制模块的输入端连接;所述第二控制模块的输出端与所述显示模块的输入端连接;在本实施例中,单片机采用的是stc89c51rc单片机,且单片机上包含了电源电路、晶振电路以及复位电路。
38.加速度传感器模块用于测量炮架的倾斜角度;在本实施例中,加速度传感器模块采用的是adxl345芯片,即片机的scl端口与所述加速度传感器模块的scl端口连接,所述单片机的sda端口与所述加速度传感器模块的sda端口连接。
39.而在加速度传感器模块中,包括三轴倾角传感器与模数转换器,所述三轴倾角传感器的第4端口与所述模数转换器的ain0端口连接,所述三轴倾角传感器的第3端口与所述模数转换器的ain1端口连接,所述三轴倾角传感器的第2端口与所述模数转换器的ain2端口连接,所述模数装换器的scl端口与所述第二控制模块的scl端口连接,所述模数转换器的 sda端口与所述第二控制模块的sda端口连接。
40.三轴倾角传感器adxl345作为一个三轴加速度传感器,在芯片上设立x、y、z三轴方向,通过勾股定理以及三角函数的应用,把检测出的各轴方向上的重力加速度进行一系列的运算,进而得出各轴方向上与水平面的角度值,此角度值即为炮架云台的倾斜角;由于 adxl345三轴倾角传感器测量出的炮架倾斜角数据属于模拟信号,而单片机只能接受二进制的数字数据,故此,由加速度传感器模块测量出的实时数据将被传递至pcf8591p模数转换器进行转换。pcf8591p具有4个模拟输入、1个模拟输出和1个串行i2c总线接口,可进行 8
‑
bit的模数转换和8
‑
bit的数模转换。数据从ain0、ain1、ain2进入pcf8591p内,转换后通过串行i2c总线接口输出至单片机内。
41.adxl345采用i2c方式2线连接,alt address引脚保持高电平状态,0x1d为设备的七位i2c地址。alt address引脚接地后,选择备用i2c地址0x53,对其转化后写入0xa6,再读取0xa7。操作i2c时需要连接引脚到vdd i/o。
42.在本实施例中选择的三轴倾角传感器的型号为adxl345的传感器,选择这个型号的原因在于采用这种型号的三轴倾角传感器,厚度低、功耗小,测量区间大,在测量倾斜角度非常适用,能够对静态重力加速度进行检测,同时在运动状态的追踪方面也非常出色,其高分辨率(4mg/lsb)更是能使之测量出运动或冲击过程造成的瞬时加速度小于1
°
的倾斜角度。
43.电子罗盘传感器模块用于测量炮架的方向角;在本实施例中,电子罗盘传感器模块选择的是hmc5883l电子罗盘传感器,且单片机的sdai端口与所述电子罗盘传感器模块的sdai 端口连接,所述单片机的scli端口与所述电子罗盘的scli端口连接。
44.采用这种模块的好处在于高度集成,且精度高、重量轻、体积小、性价比高,通过数据线和时钟线的高低电平配合,实现电子罗盘传感器hmc5883l的模式选择。
45.显示模块用于实时显示所述加速度传感器模块测量的炮架的倾斜角度以及所述电子罗盘传感器模块测量的炮架的方向角;显示模块为lcd1602液晶显示器,采用lcd1602液晶显示器,主要是采用的是直接控制方式或者间接控制方式来实现与单片机进行连接。
46.在显示模块中,可以对炮架的倾斜角以及方向角进行实时的更新以及查看,能够直观的通过数据的大小来判断炮架所处的位置是否正确,避免了对操作人员的长时间训练,也节约了对炮架进行准备的时间。
47.工作原理:
48.对调节系统进行通电,通电之后,加速度传感器模块对炮架的倾斜角进行测量,系统读取到检测出的x轴、y轴、z轴的偏移量,计算出x轴、y轴、z轴与水平面所成角度,而后通过液晶显示屏进行显示,hmc5883l电子罗盘传感器开始检测炮口朝向方向角,通过液晶显示屏进行显示,实现炮架数据的可视化。
49.实施列二
50.本实施例基于实施例一的基础上,优化了一种炮架自动调节系统,优化方案为:
51.调节系统还包括无线遥控接收模块、电机模块以及第一控制电路,所述无线遥控接收模块的输出端与所述第二控制模块的输入端连接;所述第二控制模块的输出端与所述电机模块连接;
52.在第一控制电路中,第一控制模块采用的是pt2262芯片进行控制,无线遥控发送模块为f05v模块,对信号进行传输;设置第一控制电路与第二控制电路通过无线通信的方式进行连接,即通过无线遥控接收模块与无线遥控发送模块相互匹配的模模式,主要是能够通过远程对第二控制电路模块进行控制,且通过远程信号的传输,能够实现自动对炮架的角度以及高度进行自动调节。
53.第一控制电路包括第一控制模块、无线遥控发送模块以及控制开关;所述控制开关用于控制所述第一控制模块发送的指令信号;所述第一控制模块通过所述无线遥控发送模块向所述第二控制单元发送指令信号。
54.第一控制电路用于向所述无线遥控接收模块发送指令信号,第一控制电路主要是对发送信号去控制电机模块是否需要进入工作状态,去调整炮架支脚的高度以及倾角;
55.当操作人员按下控制开关后,控制开关闭合,且发出低电平信号传输给第一控制模块,第一控制模块相对应的将数据码、地址码和固定的同步码组成一组编码发送到无线遥控发送模块出进行发送,且无线遥控接收模块采用的是pt2272l无线接收芯片为核心,与
信号增益电路结合的接收模块电路。
56.无线遥控接收模块用于接收指令信号,并将该指令信号传输到所述第二控制模块上;第二控制模块接收指令信号后,用于控制所述电机模块;电机模块用于对炮架旋转丝杆的正方向或反方向进行调整,电机模块是接受到第二控制模块发出的控制信号后,自动对炮架进行实时调节。
57.电机模块包括直流减速电机与驱动器,直流减速电机能够提供较大的力矩,且电机体积小、重量轻,所述驱动器的第8端口与所述直流减速电机的正极连接,所述驱动器的第5端口与所述直流减速电机的负极连接;所述电机模块的第二端口与所述第二控制模块的p1.0端口连接。
58.所述驱动器型号为l9110s,采用信号为l9110s信号的驱动器,l9110s是一个两通道推挽式功率放大专用集成电路器件,是为了驱动和控制电机而设计的。电机的正反向运动依靠两个输出端直接驱动,其电流驱动能力较大,两个ttl/cmos兼容电平的输入提高了系统的抗干扰性能,感性负载的反向冲击电流从内置的钳位二极管中释放,确保了在驱动器、直流减速电机的使用上安全性和可靠性。
59.所述第一控制电路设置的控制开关的数量与炮架的支脚数量相匹配,且所述第二控制模块连接的所述电机模块的数量与炮架支脚的数量相匹配,设置的控制开关与数量与电机模块的数量相互匹配,且是一一对应的控制关系,两者均与炮架的支脚数量相同,主要是通过控制开关发出指令信号,去控制相对应的电机模块进行正常工作。
60.工作原理:
61.在第一控制电路中,按下控制开关按钮,控制开关能够触发第一控制模块向第二控制模块发送指令信号,第二控制模块在接收到指令信号后,控制对应的电机模块进入工作状态,直流减速电机对相应的旋转丝杆进行正方向或反方向的调整,使得炮架达到操作者所需要的状态,控制开关按钮的触发是通过操作人员进行触发的,然后电子罗盘传感器模块与加速度传感器模块在重新对炮架的倾斜角以及方向角进行测试,在显示频上进行实时显示。
62.以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1