一种移虫装置的制作方法
一种移虫装置
1.该申请主张中国先申请,申请号2020105341830,申请日:2020-06-12 2020105341826, 申请日:2020-06-12的优先权,其全部内容作为本实用新型的一部分引用。
技术领域
2.本实用新型具体涉及一种移虫装置。
背景技术:
3.蜜蜂会产卵在蜂巢的巢房内,但是巢房的体积很小,如果让蜜蜂幼虫一直在巢房内生长,则无法长成蜂王,只能长成工蜂,不会产出蜂王浆。如果要培养蜂王产出蜂王浆,则需要在蜜蜂幼虫期,将其移至空间较大的台基条的培养碗或者培养腔体中,一方面给其足够的生长空间,另一方面可以诱导工蜂以蜂王来培育,则可以提高蜂王浆的产量,将蜜蜂幼虫从巢房内取出放入台基条内的过程,在行业里面称为移虫。
4.在卵脾孵化成幼虫后,需要由人工将幼虫连同少量的蜂王浆一起铲到台基条的培养碗内,蜂群中的工蜂见到培养碗内有幼虫,会吐出蜂乳喂养幼虫,直至幼虫长大成为蜂王。
5.传统的蜜蜂养殖企业,在移植幼虫时,通过人工的手动方式手动移除,但是手动移虫的效率低下,浪费人力。这主要是因为蜜蜂幼虫很小,几乎肉眼不可见,而且巢房的体积小,并不是每个巢房都有幼虫,另外,巢房具有一定的深度,手动移虫还可能把幼虫损伤甚至致死,从而导致效率低,存活率更低。
6.这就需要提供一种可以自动移虫的装置和方法。
技术实现要素:
7.针对上述情况,为克服现有技术的缺陷,本实用新型提供一种移虫方法和装置,利用该装置不仅可以提高效率,而且幼虫成活率高,实现自动化移虫。
8.本实用新型的第一方面,提供一种移虫机构或者装置,包括安装机构,该机构被配置为能够用于接收移虫针,移虫针能够在该机构上围绕一支点运动。
9.或者,一种移虫装置,包括用于支撑移虫针上的支点的支撑点结构和用于带动移虫针上动点运动的运动模块结构。在一些方式中,移虫针上的支点能够围绕支撑点结构转动。
10.在一些方式中,安装机构包括第一安装机构,第一安装机构包括支点结构或者支撑点结构,所述的支点结构或者支撑机构用于与移虫针上的支点配合,从而移虫针的支点能够围绕支点结构或者支撑点结构转动。
11.在一些方式中,第一安装机构上的支撑点结构包括凹槽,缺口、栓等结构。而对应的,移虫针上的支点为和凹槽配合的凸起、羽翼结构、孔等。
12.在一些方式中移虫机构还包括运动模块,所述运动模块能够带动移虫针上的动点
运动。
13.在一些方式中,或者所述的装置还包括运动模块,该运动模块用于引导移虫针上的动点进行运动。在一些方式中,动点的运动带动针上的支点围绕支撑点或者支撑结构的转动,这种转动的角度可以是任意角度,相对竖直方向,可以顺时针或者反时针转动,可以是它们两者之间的往返式转动。
14.在一些方式中,安装机构包括第二安装机构,用于安装运动模块。在一些方式中,第二安装机构与运动模块滑动连接。通过运动模块的运动,带动针上动点的运动,在一些方式中,运动模块的运动相对针的纵向来讲,进行横向运动。
15.这种动点的运动带动支点的运动,最终是希望带动移虫元件在进入蜂巢房内的时候,希望与巢房程一个角度,而不是竖直进入到巢房中,特别的,是和移虫元件的头部与巢房壁具有角度,例如呈锐角的形式,这样就希望移虫针是倾斜的,而非竖直方向。
16.在一些方式中,带动运动模块运动的方式可以是计算机编程来控制电机,通过电机来推动运动模块的运动获得这样的效果,当然,也可以接触机械的作用让运动模块运动。
17.可以这样理解,移虫元件在进入蜂巢房内的时候,希望与巢房程一个角度,而不是竖直进入到巢房中。一般巢房具有巢房壁和巢房底部,而幼虫一般位于巢房底部,所以,希望移虫元件在进入巢房内的时候,移虫元件的头部与巢房壁具有角度,例如呈锐角的形式,这样就希望移虫针是倾斜的,而非竖直方向。所以,按照y轴作为纵坐标,x轴作为横坐标来看,移虫针在倾斜的时候,可以位于第一和和三象限,这个时候,动点可以位于第一象限,而移动元件位于第三象限(假设支点为x和y轴的交点),也可以位于第二和第四象限,这个时候,动点可以位于第二象限,而移动元件位于第四象限。而巢房一般是竖直方向,中轴线和y轴平行或者y轴处于巢房的中轴线重合。
18.在一些方式中,装置包括弹性元件,该弹性元件被设置在运动模块上。例如,一端设置在运动模块上,另一端设置在装置上。这样就算通过电机来推动运动模块的运动的时候,需要克服弹性阻力的时候,推动模块运动,但是一旦电机丧失或者去掉推力的时候,依靠弹性元见的回复原状的力反向推动运动模块的运动。
19.弹性元件在下面的方式中,其它作用更为明显。在一些方式中,移虫机构或者装置还包括带有引导面的引导机构,引导面被配置为能够引导移虫针向下或者向上移动过程中,并用于调节移虫动点的运动轨迹。在一些方式中,引导面和运动模块接触,带动运动模块的运动实现动点的运动轨迹的调节。在一些方式中,引导面包括具有不同横向高度的面。这里所谓的横向高度是指,引导面相对于竖直方向上,面距离竖直方向上的点具有不同的距离,类似蜿蜒起伏的山峰一样。通过不同横向高度的调节,运动模块在横向运动上的距离可以别调节,可以相对于竖直方向的向左运动,也可以向右运动,这种横向运动的距离是可以随这运动模块在高低起伏的引导面上运动而被调节或者改变。
20.在一些方式中,装置包括弹性元件,该弹性元件被设置在运动模块上。例如,一端设置在运动模块上,另一端设置在装置上这样。这样,运动模块在起伏的引导面上运动的时候,利用弹性元件的弹力,压缩或者拉伸作用下,控制运动模块的运动轨迹。在一些方式中,当滑动模块带动动点运动的过程中,让针或者移虫元件处于竖直位置的时候,弹性元件被压缩;当弹性元件处于自然状态下,运动模块远离竖直方向(相对横向向右或者横向向左),移虫元件向左倾斜或者向右倾斜。所以,弹性元件与运动元件的配合,可以达到让运动模块
带动动点远离y轴或者靠近y轴,或者向左靠近y轴或者向右远离y轴,从而让支点转动,从而让带有移虫元件的一端处于倾斜,这样才能和巢房壁具有夹角。
21.而引导面的作用,就是在机械配合作用下,通过接触运动模块,限制模块的运动轨迹,这种运动模块的运动规避主要是横向运动的距离的长短。可以理解运动模块相对于y轴做沿 x轴方向上的运动距离的长短,来控制动点相对于y轴做沿x轴方向上的运动距离的长短,这样最终控制移虫针支点的转动角度,从而控制移虫单元的角度。通常,移虫针是竖直的,当然不排除移虫针是弯曲的,但是无论如何,动点的运动带动支点的运动,调节移虫单元的角度,这种角度是和巢房壁的角度,而不是和巢房壁平行。
22.在一些方式中,也是引导面的包括第一引导面,第二引导面,第三引导面,其中,第一引导面的横向高度大于第二引导面,第二引导面的横向高度大于第三引导面。在一些方式中,当运动模块接触引导面的第一引导面的时候,运动模块让针的动点基本处于竖直方向,此时弹性元件被压缩,当运动模块运动到第二导面的时候,弹性元件可以回弹的力推动运动模块远离竖直方向运动,从而带动动点远离竖直方向(向左或者向右),动点的运动,带动了支点的转动,从而让带有移虫元件的一端远离竖直方向,例如向右或者向左。类似跷跷板的运动,动点向左,移虫元件的一端向右,动点向右左,移虫元件的一端向左。
23.运动模块沿着引导面的运动是自上而下的运动,或者自下而上的运动,或者上下往返运动,这种运动可以是依靠电机带动整个机构来上下运动,例如带动安装结构的上下运动,如果运动模块位于安装机构上,而引导面相对固定不动,则实现运动模块在引导面上的上下滑动,实现运动模块的横向左右运动和运动的距离,从而调节动点左右运动和运动的距离,这样实现了移虫元件相反方向的运动距离。
24.在一些方式中,第一面可以是包括过渡面。第二面可以包括弧面或/和倾斜面。
25.第三面可以包括另外的斜面或者弧面。但是第一面和第二面以及第三面横向距离不相同。
26.在一些方式中,引导机构上设置有第一安装部位,用于固定安装在设备上,而相对于移虫针的安装机构来讲,移虫针的安装机构可以相对固定的引导机构上下往复运动。
27.在一些方式中运动模块上设有安装孔,用于安装移虫针的动点,移虫针能够随运动模块的运动而摆动。在一些方式中,运动模块上包括滚动元件,用于接触引导面,在引导面上进行滚动运动。
28.在一些方式中,设备还包括控制模块,该模块可以是电机也可以电机控制的机械机构,对运动模块施加一个瞬间的作用力,来完成移虫元件挖虫的动作。连接在移虫针支点下端的移虫元件自然状态是呈现稍微弯曲的状态,这种材料一般是采用塑料材料做成的,所谓稍微弯曲是指相对于含有幼虫的蜂巢房来讲,当移虫元件进入巢房中,希望移虫元件的的尖端向蜂巢房内完全一点点,这样,随着移虫元件的继续向下运动,依靠蜂巢房本身的刚性结构和柔性移虫元件接触,让柔性移虫元件在巢房底部弯曲,从而铲起,挖起,粘附位于底部的幼虫。而这仅仅是理想的状态,在这个时候,为了增加移虫的效率,希望在移虫元件快速向下移动到蜂巢房内,铲起幼虫,而不希望对幼虫造成伤害,这是因为蜂蜜的幼虫很小,几乎肉眼不可见,而且处于底部,可能伸长状态,也可能蜷缩状态,幼虫一般位于具有小量的蜂蜜或者糖水中,而且很柔软,没有任何保护作用下,采用机械的机构和力量来移动幼虫,非常容易造成伤害。所以,经过实用新型人的多次反复试验,首先希望柔性移虫元件(或
者弹性材料,例如tpee)在进入巢房内,和蜂巢房壁具有夹角,然后让移虫元件从壁上向底部运动,依靠壁的作用力,让移虫元件自然逐渐弯曲,弯曲的过程中,几乎是紧贴巢房底部弯曲。这对于柔性移虫元件的材料要求很高,当采用一般材料的柔性材料后,特别是对于多次让让移虫元件处于伸展和弯曲的过程中,经过重复多次后,可能进入巢房内的时候,移虫元件仍然处于弯曲的状态,这样几乎就不能铲起幼虫,而且由于巢房的直径很小,几乎是 0.5-0.8厘米之间,弯曲的元件进入后,直接压住幼虫,从而让其死亡。另外,当重复多次后,变成弯曲状态为了铲虫,铲虫后需要释放虫的时候,通过滑块推动元件上的虫子脱离。一般铲虫后,希望元件自然处于伸长或者伸直的状态,但是实际情况并非如此,有时候元件向后弯曲,这样进入蜂巢房的时候,很难达到倾斜的角度。总之,对于元件的这些不利因素,需要进一步克服这些缺陷,从而延长元件的使用寿命,提高移虫效率,降低死亡率。
29.所以,在当移虫元件和蜂巢房壁接触的时候,或者之前,希望移虫元件处于伸展或者伸直的状态,然后再让移虫元件弯曲,沿着巢房底部进行弯曲。所以在一些方式中,当弹性移虫元件进入蜂巢房内或者之前,移虫元件为伸展或者伸直的状态,为了到达这种状态,一种方式就是让针上的用于推虫的滑块处于推动的状态,让本来有些弯曲的移虫元件处于伸展状态,从而方便和蜂巢房壁呈现一个角度。
30.另外,从移虫元件接触巢房壁,然后向底部弯曲去铲虫的过程,几乎是0.1-0.3秒的时间完成,所以,这个时候,虽然移虫元件是倾斜的状态(由于运动模块带动动点的运动过程中),给运动模块一个非常快速的反向作用力,让倾斜的移虫元件快速的向相反反向运动,完成“铲”的动作,这样可以非常有效的“铲”起幼虫。例如,当运动模块沿着引导面从上到下快速的运动过程中,快速的带动动点远离y轴的运动,例如快速的向右远离y轴(例如横向距离0.5厘米),这个时候,移虫元件快速的向下运动并快速的远离y轴向左运动,这个时候,元件与巢房壁呈现角度(例如30度),当针继续被带动向下运动的时候,元件弯曲,并穿过巢房的底部,例如穿过糖水或者蜂蜜水,希望利用糖水的粘性,一起铲起幼虫,这个时候,如果快速的给运动模块一个反向作用,例如向靠近y轴的一个力,这个反作用力速度很快,而且非常短暂,类似快速敲打的节奏,这个快速的反作用力让活动模块快速的向会运动,这个时候,元件就快速的向相反方向,例如向靠近y轴的方向运动,类似抖动的过程,这样就完成了“铲”的动作。完成敲打运动模块的可以电机的转子来直接接触运动模块,当然,电机被设置在运动模块的附近,和运动模块一起从上到下运动。当然,电机可以设置在引导元件上,运动模块在引导元件上运动到合适位置,电机的转子来直接接触运动模块,给模块一个反向的力,例如从远离y轴向靠近y轴的力。
31.第二方面,本实用新型涉及一种移虫的方法,该方法包括:
32.让弹性的移虫元件与巢房壁程锐角,并且,让弹性的移虫元件处于伸直的状态。在一些方式中,通过针上的滑动推块让弹性的元件处于伸直的状态,例如滑动推块缩回的时候,弹性元件可以被弯曲,当滑动推块推出到弹性远近的末端的时候,弹性元件被推块推直。
33.在一些方式中,让弹性的移虫元件与巢房壁接触并程锐角。从而随着元件的继续下移,让滑动推块缩回,让弹性元件弯曲,从而铲起巢房底部的幼虫。
34.在一些方式中,弹性元件的弯曲是基于和巢房壁接触并向下运动,迫使弹性元件沿着巢房壁和巢房底部进行弯曲。一般巢房底部和巢房壁为刚性的,弹性元件在内部运动
的时候,能够进行弯曲,这里的弹性可以理解为柔性材料,当描述移虫元件的时候,具有弹性的性质,也具有柔性的性质,或者二者兼而有之。
35.所以,本实用新型提提供一种移虫方法,其特征是,包括以下步骤:
36.步骤1:使移虫针位于第二位置,此时移虫元件接触巢房内壁,所述第二位置指的是:移虫针动点向前倾斜,移虫元件向后倾斜,移虫元件的方向相对于竖直方向向后倾斜一定角度;使移虫元件处于直线状态,不发生弯曲;
37.步骤2:使移虫针处于第三位置,在移虫针由第二位置变化到第三位置过程中,完成移虫操作;所述第三位置为:移虫针动点向后倾斜,移虫元件向前倾斜,移虫元件的方向相对于竖直方向向前倾斜一定角度,移虫元件上负载或者粘附有蜂虫或者幼虫。
38.在一些方式中,步骤(1)-(2)中,所述一定角度为5
°‑
40
°
。
39.在一些方式中,步骤(2)中,使移虫针由第二位置改变到第三位置的过程中,移虫元件弯曲,移虫针动点向后摆动,移虫元件向前移动,移虫元件拨动含有蜂虫的蜂浆,并使含有蜂虫的蜂浆粘附在移虫元件上。
40.在一些方式中,步骤(2)中,移虫元件上负载有蜂虫之后,使移虫针向上移动,脱离巢房。
41.在一些方式中,步骤(2)中,移虫元件上负载有蜂虫之后,使移虫针向上移动,同时向后移动,脱离巢房。
42.在一些方式中,移虫针脱离巢房,并且处于第三位置后,使移虫针向前移动。
43.在一些方式中,其特征是,移虫针脱离巢房,并且处于第三位置后,使移虫针动点向前移动,同时使移虫针向下移动至目标位置。
44.在一些方式中,移虫针脱离巢房,并且处于第三位置后,使移虫针动点向前移动,同时使移虫针向下移动至目标位置,移虫针进入培养碗,将蜂虫推出至培养碗中。
45.在一些方式中,在移虫针接触巢房内壁之前,移虫针处于第二位置或者第一位置,或者处于由第一位置变化到第二位置过程中的任意一个位置。
46.在一些方式中,移虫针由第一位置改变到第二位置的过程中,使移虫针向下移动至移虫元件接触巢房内壁。
47.本实用新型的第四方面,提供一种用于移虫的检测装置,其特征是,包括滑动支架、用于采集巢房中蜂虫信息的采集元件、用于检测巢房中蜂虫的检测元件,采集元件被安装在滑动支架上,滑动支架包括滑动件,滑动件能够沿着滑道进行滑动,采集元件能够随之移动。
48.在一些方式中,还包括用于识别移虫针或者巢房所处位置的定位元件。
49.在一些方式中,所述滑动支架包括第一安装臂与第二安装臂,采集元件安装在第一安装臂上。
50.在一些方式中,定位元件安装在第二安装臂和/或第一安装臂上。
51.在一些方式中,第一安装臂与第二安装臂相对设置。
52.在一些方式中,采集元件采用摄像装置,被配置为能够拍摄巢房内部照片。
53.在一些方式中,定位元件采用位置传感器。
54.在一些方式中,所述检测装置还包括卡接结构,所述卡接结构包括卡接部位。
55.在一些方式中,所述卡接部位为弧形卡接部位。
56.在一些方式中第一安装臂上连接有卡接件。
57.一种移虫装置,包括安装机构,该机构被配置为能够用于接收移虫针,移虫针能够在该机构内围绕一支点摆动。
58.进一步地,安装机构包括第一安装机构,第一安装机构包括支点结构或者支撑点结构。
59.进一步地,支撑点结构为凹槽。
60.进一步地,第一安装机构包括用于支撑移虫针支点的支撑点结构。
61.进一步地,移虫机构还包括运动模块,所述运动模块能够带动移虫针上的动点摆动。
62.进一步地,安装机构包括第二安装机构,用于安装运动模块。
63.进一步地,第二安装机构与运动模块滑动连接。
64.进一步地,移虫机构还包括引导机构,引导机构被配置为能够引导移虫针向下或者向上移动,并用于调节移虫针摆动的角度。
65.进一步地,所述引导机构包括时规,时规具有引导面,被配置为能够引导移虫针进行移动。
66.进一步地,引导面包括过渡面。
67.进一步地,过渡面为弧面或/和倾斜面。
68.进一步地,引导面包括过渡面和/或平面。
69.进一步地,时规上设有第一安装部位。
70.进一步地,运动模块上设有安装孔,用于安装移虫针的动点,移虫针能够随运动模块的运动而摆动。
71.进一步地,运动模块端部连接有滚动元件。
72.进一步地,运动模块的安装有滚动元件的那一端设有凸块。
73.进一步地,运动模块远离滚动元件的那一端设有连接元件。
74.进一步地,第二安装机构包括滑槽,被配置为用于接收运动模块。
75.进一步地,滑槽内设有弹性元件。
76.进一步地,滑槽外端设有限位块。
77.进一步地,第一安装机构还包括挡块。
78.本实用新型的有益效果是:
79.(1)本实用新型的移虫机构能够使得移虫针倾斜着向下进行巢房,模拟人工移虫的手法,挖取蜂虫连同少量的蜂王浆,并能够将它们移动到培养碗中,移虫速度快,精度高,效率高。采用本实用新型的移虫机构进行移虫操作,移虫成功率高达90%以上,最终的移虫成活率也较高。相对于传统的移虫机构,本实用新型的移虫机构在移虫时能够保护移虫针,延长移虫针的使用寿命。
80.(2)本实用新型中,时规具有引导面,能够引导移虫针进行向上或者向下移动,并用于辅助调节移虫针摆动的角度,有利于完成移虫操作。
81.(3)本实用新型运动模块端部连接有滚动元件,滚动元件能够沿着接触面滚动;相对来说,滚动元件与接触面的摩擦力较小,不会磨损接触面或者损伤其他部件,而且相同条件下,滚动元件滚动速度更快。当需要改变移虫针位置时,可以使运动模块上的滚动元件沿
相应地接触面(比如引导面)滚动,即可调节移虫针的位置。
82.(4)本实用新型中移虫针被安装在运动模块内,运动模块能够在滑槽中滑动,运动模块与滑槽相互配合,能够调节移虫针向前或者向后倾斜的角度(前后摆动的幅度),进而使得移虫针能够倾斜着进入巢房,避免直上直下移取蜂虫,导致移虫成功率不高。
83.(5)本实用新型中的高度调节机构,包括动力装置、动力传递装置与移动架;动力传递装置能够将动力传递给动力传递装置,移动架能够在动力的驱动下进行移动,移虫针能够随之进行向上或者向下移动,进而实现调节移虫针处于不同的高度。该调节机构简单,便于调节移虫针的高度,有利于移取蜂虫。
84.(6)本实用新型中,移动架内部设有弹性件,弹性件的设置,使得配合件与移虫针不会马上随着移动架进行向上移动,而是存在一定缓冲时间或者存在一定的时间延迟,比如当移虫元件接触到培养碗底部,第四电机被启动,与第四电机连接的干涉块,会按压横向凸块,使移虫针摆动,移虫针上段向后倾斜,移虫元件向前移动,挖取蜂虫,而后,使移虫针向上移动。最初移虫针向上移动时,有一定的时间延迟,避免出现这样的现象:移虫元件还没有挖取蜂虫,移虫针就已经向上移动,脱离了巢房。弹性件的设置,使得移虫元件能够较好地移取蜂虫,有效地移虫,避免移虫针挖不到蜂虫,导致移虫失败。
附图说明
85.图1是本实用新型第一安装机构与第二安装机构的结构示意图。
86.图2是本实用新型第一安装机构的侧向结构示意图。
87.图3中,(1)是第一安装机构的正视图,(2)是第一安装机构的侧向结构示意图(显示出了支撑点结构)。
88.图4中,(1)是第二安装机构的正视图,(2)是第二安装机构的侧向结构示意图。
89.图5中,(1)是一个具体实施方式中,运动模块的结构示意图,(2)是另一个具体实施方式中,运动模块的结构示意图;(3)是其他具体实施方式中,运动模块的结构示意图。
90.图6中,(1)是移虫针与运动模块结合在一起的结构示意图,(2)是运动模块与第二安装机构结合在一起的结构示意图。
91.图7中,(1)第二安装机构与第一安装机构结合在一起的结构示意图,(2)是挡块的结构示意图。
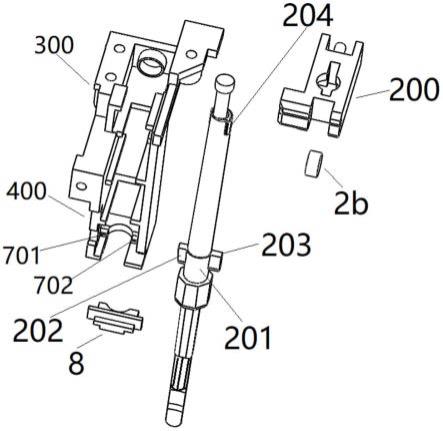
92.图8中,(1)第二安装机构与第一安装机构结合在一起的结构示意图,(2)移虫针与第一安装机构结合在一起的结构示意图,(3)移虫针的分解图。
93.图9是运动模块与第二安装机构结合在一起的结构示意图。
94.图10是移虫针向前或者向后摆动过程示意图。
95.图11中,(1)是干涉块按压凸块时,移虫针处于向后倾斜状态时的结构示意图(图中显示出了高度调节机构);(2)是高度调节机构背部的示意图(为了显示出第一齿轮与第一齿合板的配合结构,隐去了部分支撑架结构)。
96.图12中,(1)是一个具体实施方式中,时规的结构示意图,(2)是另一个具体实施方式中,时规的结构示意图。
97.图13中,(1)是干涉块与时规结合的结构示意图,(2)是干涉块的结构示意图。
98.图14是移虫针移取蜂虫的过程示意图(显示出了随着时间的推移,移虫针与巢房
等类似词语并不表示数量限制,可表示单数或复数。本技术所涉及的术语“包括”、“包含”、“具有”以及它们任何变形,意图在于覆盖不排他的包含;本技术所涉及的“连接”、“相连”、“耦接”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电气的连接,不管是直接的还是间接的。本技术所涉及的“多个”是指大于或者等于两个。“和/或”描述关联对象的关联关系,表示可以存在三种关系,例如,“a和/或b”可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。本技术所涉及的术语“第一”、“第二”、“第三”等仅仅是区别类似的对象,不代表针对对象的特定排序。
116.实施例1
117.一种移虫机构或者装置,如图1-2所示,包括一机构(或者安装机构),该机构被配置为能够用于接收移虫针,从而,移虫针在该机构内围绕一支点前后摆动。
118.所谓的“支点”是指移虫针上的某一个位置与机构上的某一位置或者结构配合,让移虫针依靠该支点进行前后摆动,从而达到控制移虫针相对于竖直方向的角度(也就是说,控制移虫针所在直线与竖直线之间的夹角)。这里的支点可以理解为相对固定不动的点,这的固定并不是说完全固定,而是移虫针上的某一个位置或者某一点支撑在安装机构上的一个点或者结构作为支点,移虫针可以沿着该支点转动,转动的过程中,该支点的位置在移虫针基本保持不变。
119.在一些方式中,这种支点的运动,依靠相对支点的另外一个点的位置的变化而变动。另外一个点可定义为动点,该动点带动指移虫针上的另外一个位置或者另外一个点的运动,利用类似杠杆原理或者跷跷板的原理,动点的移动,例如前后运动,则带动支点的转动,从而带动移虫针的摆动。
120.当然,这里的支点可以是移虫针上某一点支撑在安装机构上的一个点或者一个结构作为支点的支撑点或者支撑结构,从而移虫针围绕支点或者支撑结构转动或者摆动。这里的活动点可以是位于移虫针上的另外一个点,该点被带动移动,这种移动包括水平位置的移动或者其他方式位置的移动,带动移虫针上的支点围绕支撑结构或者支撑点转动。
121.在一些方式中,本实用新型提供一种具体的结构,实现移虫针上的动点的运动带动移虫针上的支点的运动,从而实现移虫针上的前后摆动。具体下面会详细解释。
122.例如图1所示,该结构包括支点结构7或者叫做支撑点结构,移虫针上包括支点201,该支点201与支点结构或者支撑点结构,也可以叫做支撑点,结构活动配合,让移虫针上的支点201依靠结构700上的支撑结构或者支撑点,可以围绕支撑结构上的支撑点转动或者摆动。例如如图1-3所示,支撑结构可以为一个凹槽7,而支点201则为类似羽翼结构202或者凸起结构,包括两个延伸的羽翼202和203,分别位于两个凹槽701和703上,这样可以让羽翼结构在凹槽内,做类似支点的运动。当然,这里的支点和支撑点可以是其它任何方式,例如支撑结构可以为一圆柱体,而移虫针上含有横向通孔,圆柱体穿过通孔,也可以实现支点围绕支撑点的转动。其它任何形式或者结构,凡是能够实现移虫针上包括支点201可以围绕机构上的支撑点的直接或者间接的接触,从而实现移虫针上包括支点201能够相对支撑点的转动或者摆动都可以用于本实用新型的具体实施方式中。
123.在一些优选的方式中,所述的装置包括支撑点的第一安装机构与用于安装运动模块的第二安装机构,第二安装机构位于第一安装机构的上方。这里的安装仅仅理解为用于安装、容纳、接收移虫针,而非固定移虫针让其不能活动的机构。
124.在一些优选的方式中,如图2-3所示,第一安装机构包括第四安装板4(即底板)左右端部分别设有凹槽7,该凹槽7能够与移虫针20上的凸起块进行配合,将移虫针的凸起块 203,202安装在凹槽701,703中,使得移虫针20不会向下掉落或者脱出移虫针20安装机构;在一些优选的方式中,凹槽为弧形凹槽(支撑支点的支撑点或者支撑结构),弧形凹槽使得移虫针20上的支点201能够围绕弧形凹槽7所设定的支撑点进行前后摆动,便于调节移虫针20向前或者向后倾斜的角度。
125.在一些优选的方式中,所述的第一安装机构还包括第一安装板1(即右侧板)上设有开孔5,通过开孔,便于安装移虫针,而且能够看到移虫针20被安装在第一安装机构的内部,判断是否安装到位。
126.在一些优选的方式中,如图1-3所示,第一安装机构包括第一安装板1、第二安装板2、第三安装板3、第四安装板4,它们两两连接固定在一起或者它们是一体成型。在一些优选的方式中,如图1-3所示,第一安装板1与第二安装板2相对设置,第一安装板1与第二安装板2作为两个相对的侧面,能够保护移虫针20,避免移虫针移虫时被左右两侧的其他物体或者机构干扰。
127.在一些优选的方式中,第三安装板3作为后侧板,分别与第一安装板1、第二安装板2、第四安装板4连接在一起,第四安装板4作为底板,分别与第一安装板1、第二安装板2、第三安装板3连接固定。在一些优选的方式中,如图1-3所示,第四安装板4(即底板)上设有通孔6,使得移虫针20刚好能够插入通孔,移虫针的上段21位于通孔6的上部,安装结合部与通孔结合,移虫针的中段与下段均位于通孔下方。
128.可以理解,所谓的第一到第四安装板仅仅是对于结构不同部位的的称谓,他们可以一体成型,例如塑料,例如金属等一体成型。当然,这里的第一和第三的安装板都可以省略不要,仅仅保留带有支撑结构的第四安装板4。
129.在一些优选的方式中,如图1所示,第一安装机构还包括挡块8,在一些优选的方式中,挡块8与第三固定板3相对设置,与第一固定板1、第二固定板2可拆式连接,比如,本实施例中,挡块8分别与第一固定板1、第二固定板2卡接式连接。在一些优选的方式中,如图7所示,挡块8包括卡接面70,在一些优选的方式中,卡接面70为弧形卡接面,能够与移虫针安装结合部83相结合,在一些优选的方式中,挡块8还包括第一卡接部位71与第二卡接部位72,两者能够与第一安装机构上的卡槽相配合,实现连接。挡块的设置能够进一步地固定移虫针,使移虫针的安装结合部与第一安装机构结合得较为紧密。如图8所示,移虫针安装结合部83可以作为一个支点,移虫针此处保持不动或者能够轻微的向前或者向后摆动,如图3所示,移虫针20被安装在第一安装机构中,被固定的地方(即移虫针安装结合部83)作为一个支点,当用手或者采用其他方式向前拨动移虫针上段21时,移虫针的上段21能够向前倾斜或者向前摆动,同时移虫针的下段23能够向后倾斜或者向后摆动,如图 10所示。在一些优选的方式中,第一固定板与第二固定板上设有连接部件。在一些优选的方式中,所述连接部件包括第一连接部件10、第二连接部件11,第一连接部件10与第二连接部件11连接固定。本实施例中,如图3所示,第一连接部件10为连接板,第二连接部件 11与第一固定板、第二固定板上固定连接;第二连接部件11上设有连接孔。
130.在另外一个方式中,移虫针上包括动点,该动点位于移虫针上的另外的位置,例如一端的动点202,该动点能够运动,这种运动带动支点的运动。下面以具体结构图来进行说
明。移虫针的动点202被设置在一运动模块200上,运动模块的运动带动动点204的运动,例如运动模块的前后水平运动,必然带动支点201围绕支撑点的转动。例如图1所示,动点204 的水平运动带动支点201的前后摆动,这种摆动是让支点围绕支撑点的摆动。
131.这里的移虫针一般是刚性的结构,所以容易实现动点204的运动带动支点201的运动,从而产生类似跷跷板的运动方式。具体的讲,移虫针的一端带有移虫元件,该元件可以为柔性元件,类似毛刷、柔细片、柔性块、柔性丝等,该柔性元件可以被插入到巢房中,柔性元件的弯曲,从而可以挖起、粘接或者舀起蜜蜂幼虫。移虫元件一般是弹性元件,能够弯曲变形。在一些优选的方式中,本实用新型中的移虫机构可以包括移虫针,如图8所示,移虫针包括上段21、安装结合部、中段22与下段23,移虫针下段23包括移虫元件,用于移取蜜蜂幼虫;移虫针下段还包括推舌7m,推舌7m位于移虫元件4f侧面,推舌7m与移虫元件接触,推舌7m能够将移虫元件表面的蜂王浆与幼虫推出,使其脱离移虫元件。本实用新型中,所述移虫针可以采用现有技术中常规的移虫针,比如采用专利申请号为:201810974288.0 或者申请号为:201810974335.1中的移虫针等等,当然也可以采用现有技术中其他形式的移虫针,本实用新型不对移虫针的结构进行改进。
132.一般移虫元件位于移虫针的一端,例如支点201的下端(移虫针为竖直位置的时候),而动点204位于支点的上端。
133.所以,本实用新型提供一个移虫装置,该装置包括用于支撑移虫针支点的支撑点,和用于固定移虫针动点的运动模块,该运动模块的运动带动移虫针的支点围绕支撑点的转动,从而实现移虫针的移虫元件摆动。在一些方式中,动点的前后运动,带动移虫元件的前后运动或者前后摆动,这里的前后摆动或者前后运动具有与竖直方向上的夹角(如图10)。也可以这样理解,动点的运动用于调节移虫针向前或者向后摆动的角度。此处所述的角度也可以是指:移虫针与竖直轴线之间的夹角。
134.在一些方式中,支撑点和运动模块为一体结构。例如如图1所示,运动模块200包括一个孔,用于固定移虫针上的动点204。例如动点也可以是类似羽翼的结构,被固定在孔3b 中(图6),这里所述“固定”指的是:能够用于安装移虫针20,安装后,移虫针20不会脱离运动模块,不会左右晃荡,但是移虫针20的动点204可以被运动模块带动前后运动。
135.运动模块的前后运动可以是接触机械的力量推动模块的运动,当然,也可以借助电机的力量来带动运动模块的运动。甚至,在移虫针的上下运动过程中带带动移虫针的动点的运动,从而实现移虫元件的前后摆动。这在后面会详细说明。
136.在一些方式中,运动模块200被设置在一固定结构300(即第二安装机构)中,例如运动模块200具有两侧的滑轨,而固定结构300中具有滑道,运动模块可以在滑道中前后运动,从而带动移虫针的动点的前后运动。
137.在一些优选的方式中,第二安装机构被配置为能够与运动模块200配合,用于调节移虫针20与竖直轴线之间的夹角,所述夹角指的是:移虫针20相对于竖直轴线向前或者向后倾斜的角度,如图10所示。该第二安装机构可以与第一安装机构直接或者间接连接,两者也可以是一体成型。
138.在一些优选的方式中,第二安装机构与运动模块滑动连接,如图6所示,运动模块能够在第二安装机构中滑动,能够改变移虫针向前或者向后摆动的幅度,改变移虫针与竖直轴线之间的夹角。
4f的方向相对于竖直方向向后倾斜一定角度;移虫针与巢房的相对位置关系如图14所示,移虫元件与巢房的相对位置关系如图26所示,移虫针的摆动如图10所示。图14中,第二位置w2可以是d处所表示的状态或者第二位置为c-d之间某一时刻所表示的状态。
149.使移虫针处于第二位置可以采用机械的力量推动,当然,也可以借助电机的力量来使移虫针运动。
150.(2)使移虫针20处于第一位置w1,在移虫针由第二位置变化到第一位置过程中,完成挖虫。所述第一位置w1指的是:移虫针20向后倾斜,移虫针20的移虫元件4f相对于竖直方向向前倾斜一定角度。移虫针与巢房的相对位置关系如图14所示,移虫元件与巢房的相对位置关系如图26所示。图14中,第一位置w1可以是f处所表示的状态或者第二位置为f之前某一时刻所表示的状态。
151.在一些方式中,在移虫针接触巢房内壁之前,移虫针可以处于第二位置或者第一位置,或者处于由第一位置变化到第二位置过程中的任意一个位置或者处于其他位置,均可。
152.在一些优选的方式中,步骤(1)-(2)中,所述一定角度为5
°‑
40
°
。
153.在一些优选的方式中,步骤(2)中,使移虫针由第二位置改变到第一位置的过程中,移虫元件接触到巢房内壁之后,使移虫针向后摆动(使移虫针摆动的驱动力,可以采用机械的力量推动或者借助电机的力量来控制移虫针摆动),移虫元件向前移动,移虫元件贴着巢房内壁向前弯曲,移虫元件拨动含有蜂虫的蜂浆,并使含有蜂虫的蜂浆粘附在移虫元件上。
154.同样地,使移虫针由第二位置变化到第一位置可以采用机械的力量推动,当然,也可以借助电机的力量来使移虫针运动。
155.在一些优选的方式中,步骤(2)中,移虫元件上负载或者粘附有蜂虫之后,使移虫针向上移动,脱离巢房。
156.在一些优选的方式中,步骤(2)中,移虫元件上负载有蜂虫之后,使移虫针向上移动,同时向后移动,脱离巢房。
157.在一些优选的方式中,移虫针脱离巢房,使移虫针移动至目标位置,移虫针倾斜着进入培养碗,将蜂虫推出放至培养碗中。所述目标位置指的是:移虫针处于台基条的培养碗上部。
158.在一些优选的方式中,放虫过程中,移虫针向下移动至移虫元件接触培养碗内壁之后,蜂虫被推出,然后移虫针向上移动,同时向后移动。
159.采用本实用新型的移虫机构与移虫方法,移虫成功率高达90%以上,最终的移虫成活率也较高。相对于传统的移虫方法,本实用新型的移虫方法能够保护移虫针,延长移虫针的使用寿命。
160.在其他实施方式中,本实用新型提供一种移虫方法,如图27所示,所述方法模拟手动移虫操作,可以采用以上所述的移虫机构或者装置,具体包括以下步骤:
161.(1)使移虫针20位于第二位置w22,所述第二位置w22指的是:移虫针20向前倾斜,移虫元件4f向后倾斜,移虫元件4f的方向相对于竖直方向向后倾斜一定角度;并且移虫针的推舌7m处于向下推出的状态,推舌7m紧贴移虫元件,这样使得移虫元件具有一定的刚性,移虫元件4f是直的,非弯曲状态,这样能够使得移虫元件接触巢房内壁时,移虫元件是直
的,不发生弯曲,当推舌7m向上移动过程中,移虫元件向前弯曲,可以有效地挖取蜂虫,避免移虫元件接触巢房内壁时,向后弯曲,不能挖取蜂虫。
162.移虫针与巢房的相对位置关系类似于图14,移虫元件与巢房的相对位置关系如图27所示,移虫针的摆动如图10所示。图27中,第二位置w22可以是(4)处所表示的状态或者第二位置为(3)-(4)之间某一时刻所表示的状态。
163.(2)使移虫针20处于第三位置w33,在移虫针由第二位置变化到第三位置过程中,完成移虫操作。所述第三位置w33指的是:移虫针20向后倾斜,移虫针20的移虫元件4f相对于竖直方向向前倾斜一定角度,移虫元件上负载或者粘附有蜂虫。移虫针与巢房的相对位置关系类似于图14,移虫元件与巢房的相对位置关系如图27所示,移虫针的摆动如图10 所示。图27中,第三位置w33可以是(7)处所表示的状态或者第二位置为(6)-(7)之间某一时刻所表示的状态。
164.在一些优选的方式中,步骤(1)-(2)中,所述一定角度为5
°‑
40
°
。
165.在一些优选的方式中,步骤(2)中,使移虫针20由第二位置w22改变到第三位置w33 的过程中,移虫元件接触到巢房内壁之后,移虫针的推舌7m向上移动,移虫元件贴着巢房内壁向前弯曲;使移虫针向后摆动(使移虫针摆动的驱动力,可以采用机械的力量推动或者借助电机的力量来控制移虫针摆动),移虫元件4f向前移动,移虫元件4f拨动含有蜂虫的蜂浆,并使含有蜂虫的蜂浆粘附在移虫元件4f上。
166.在一些优选的方式中,步骤(2)中,移虫元件上负载或者粘附有蜂虫之后,然后将移虫针20向上移动,移虫针带着蜂虫与蜂浆,脱离巢房。
167.进一步地,步骤(2)中,移虫元件上负载或者粘附有蜂虫之后,然后将移虫针20向后水平移动同时向上移动,移虫针带着蜂虫与蜂浆,脱离巢房。
168.在一些优选的方式中,移虫针脱离巢房,并且处于第三位置后,使移虫针向前移动。
169.在一些优选的方式中,移虫针脱离巢房,并且处于第三位置后,使移虫针向前移动,同时使移虫针向下移动至目标位置,移虫针倾斜着进入培养碗,接触到培养碗内壁,然后将蜂虫推出放至培养碗中。所述目标位置指的是:移虫针处于台基条的培养碗上部。
170.在一些优选的方式中,移虫针20脱离巢房后,移虫针20处于第三位置w33,放虫过程中:使移虫针20向前移动到台基条处,对准培养碗,移虫针向下移动,倾斜着进入培养碗,移虫元件接触培养碗时,移虫元件向前倾斜,然后,按压移虫针,使得推舌7m向下移动,推动移虫元件表面的蜂虫与蜂王浆,使得蜂虫与蜂王浆脱离移虫元件4f,进入台基条的培养碗中。
171.进一步地,放虫过程中,移虫元件接触培养碗内壁之后,按压移虫针,使得推舌7m向下移动,推动移虫元件表面的蜂虫与蜂王浆,然后推舌7m向上移动,移虫针向上移动,同时移虫针向后移动,移虫元件背部在培养碗边缘处刮一下,刮掉移虫元件背部粘的蜂王浆,然后移虫针继续向上与向后移动离开培养碗。
172.在一些方式中,在移虫针接触巢房内壁之前,移虫针可以处于第二位置或者第三位置,或者处于由第一位置变化到第二位置过程中的任意一个位置或者处于其他位置。
173.在一些优选的方式中,移虫针20处于第二位置w22之前,移虫针20是处于第一位置 w11的,第一位置w11指的是:移虫针向后倾斜,移虫元件向前倾斜,移虫元件的方向相对于
竖直方向向前倾斜一定角度,使移虫元件处于直线状态,不发生弯曲;
174.在一些优选的方式中,移虫针20处于第一位置之后,使移虫针20向下移动。
175.在一些优选的方式中,本实施例中的移虫方式类似于图23,区别在于,移虫针处于第一位置与第二位置时,移虫针推舌7m处于向下推出的状态。在一些优选的方式中,使移虫针20由第一位置w11改变到第二位置w22的过程中,将移虫针20向后水平移动,同时使移虫针向下移动。
176.在一些优选的方式中,使移虫针20由第一位置w11改变到第二位置w22的过程中,移虫针20向下移动同时移虫针整体向后水平移动至移虫元件4f接触巢房内壁,此时移虫元件 4f倾斜一定角度(移虫元件相对于巢房内壁倾斜),而且移虫元件是直的,不发生弯曲,不同于传统移虫方式(传统移虫方式是不管巢房的形状是怎样的,移虫针均是竖直地,从巢房中间位置进入巢房)。
177.采用本实用新型的移虫方法,移虫成功率高达95%以上,最终的移虫成活率也较高。相对于传统的移虫方法,本实用新型的移虫方法能够保护移虫针,延长移虫针的使用寿命,而且可以避免伤害蜂虫。
178.实施例2
179.在一些优选的方式中,该移虫机构还包括引导机构,引导机构被配置为能够引导移虫针20向下或者向上移动,并能够与运动模块相互作用,使移虫针摆动,改变移虫针20与竖直轴线之间的夹角,进而能够改变移虫轨迹。
180.在一些优选的方式中,用于移虫的引导机构,如图12所示,包括时规,时规具有引导面1a,被配置为能够引导运动模块进行移动,此处所述移动指的是:运动模块能够沿着引导面向上或者向下移动,而且在向上或者向下移动的过程中,引导面与运动模块相互作用,能够改变运动模块在滑槽中的位置,进而能够改变移虫针在滑槽中的位置,也就是说,能够改变移虫针在前后方向上的位置。
181.如图11所示,运动模块能够沿着引导面向上或者向下移动的过程中,引导面的位置是固定不动的,不发生改变,运动模块的位置会随着引导面形状的不同,发生改变,使得运动模块可以在滑槽中移动,移虫针20能随之向上或者向下移动以及向前或者向后移动,进而完成移虫操作,如图14-15所示,从巢房中挖取蜂虫(一般,挖取蜂虫时会连带一些蜂王浆)。
182.在一些优选的方式中,如图12所示,引导面包括过渡面,运动模块沿着过渡面进行向上或者向下的移动时,运动模块可以在滑槽中移动,移虫针摆动,移虫针的前后位置发生改变,移虫针由某一位置改变至另一位置。在一些实施方式中,过渡面仅仅为弧形面,运动模块沿着弧形面向上或者向下移动时,运动模块在滑槽中慢慢移动,单位时间内移虫针摆动的幅度较小,移虫针慢慢地改变其在前后方向上的位置。在一些实施方式中,过渡面包括倾斜面,运动模块沿着倾斜面向上或者向下移动时,运动模块在滑槽中快速移动,单位时间内移虫针摆动的幅度较大,移虫针能够快速地改变其在前后方向上的位置。在另一些实施方式中,过渡面包括倾斜面与弧面。倾斜面与弧面的先后顺序以及倾斜面、弧面的数量大小,可以根据具体情况进行设定。
183.在一些实施方式中,引导面包括过渡面和/或平面;当运动模块沿着平面向上或者向下移动时,运动模块与平面之间的水平距离不变,运动模块在滑槽中的位置不变,移虫针
不进行摆动,也就是说,移虫针的高度在不断变化,但是移虫针的水平位置(前后位置)不变。在具体实施时,可以根据实际情况选择不同形状的引导面。本实用新型不对引导面的形状进行具体地限定。
184.在一个具体实施方式方式中,如图11,12(1)所示,从上到下,引导面包括多段状态,依次为第一平面4a、弧形面5a、第一倾斜面2a、第二平面6a与第二倾斜面7a。由于时规固定连接在支撑架9上,导引面是固定不动的,运动模块可以在高度调节机构的作用下进行向上或者向下移动,运动模块与不同状态下的引导面相互作用(运动模块与引导面可以是直接接触或者非直接接触,但是两者之间存在相互作用力),能够改变移虫针20与竖直轴线之间的夹角。当移虫针位于第二倾斜面7a处,移虫针处于巢房底部挖虫过程,如图14中,移虫针处于d状态,此时移虫针位于第二倾斜面7a的某一位置。第二倾斜面7a的设置,还便于运动模块改变移动方向,比如有利于运动模块由向下移动改变为向上移动。
185.在一些优选的方式中,该引导机构可以被安装在移虫装置或者移虫机构中。本实施例中,如图11所示,该引导机构能够被固定安装在支撑架9上。运动模块能够沿着引导面1a 进行向上或者向下移动,进而能够引导移虫针20向上或者向下移动,同时,可以使移虫针摆动,使得移虫针20能够顺利进入巢房中,挖取蜂虫。
186.在一些优选的方式中,如图11-12所示,时规的上端具有连接头3a,能够与其他部件进行连接。在一些优选的方式中,可以采用螺栓或者螺钉等将该连接头3a与移虫机或者其他装置固定连接,使得时规被安装在移虫机或者其他装置上。本实施例中,如图11所示,连接头3a固定连接在支撑架9上。
187.在其他实施方式中,如图12(2)所示,从上到下,引导面包括多段状态,依次为第一平面4a、弧形面5a、第一倾斜面2a、第二平面6a与第二倾斜面7a与第三平面88a,其中,第二倾斜面7a便于运动模块改变移动方向,进行向上移动。第三平面88a作为一个保护面,使得运动模块不会由于惯性而移动到时规底部。
188.本实施例中的其他实施方式可以与实施例1相同或者采用与实施例1相类似的方式。
189.本实施例中的其他实施方式可以与实施例1相同或者采用与实施例1相类似的方式。
190.实施例3
191.在一些优选的方式中,如图5所示,运动模块上设有安装孔1b,移虫针上段21能够被固定安装在安装孔1b中,移虫针能够随运动模块的运动而摆动。在一些优选的方式中,安装孔1b的直径与移虫针上段21的直径大小相匹配,具体地,安装孔1b的直径略大于移虫针上段21的直径,移虫针上段21恰好能够稳定地处于安装孔1b中。由于,移虫针被安装在第一安装机构中,移虫针的安装结合部83可以作为一个支点,当运动模块在第二安装机构中向前移动(或者向后移动),那么,移虫针上段21能够随运动模块向前摆动(或者向后摆动),同时移虫针的中段22与下段23能够向后摆动(或者向前摆动),如图8所示。
192.在一些优选的方式中,运动模块端部连接有滚动元件;在一些优选的方式中,滚动元件为滚轮2b。在一些优选的方式中,如图5所示,运动模块的外端部连接有滚轮2b,滚轮2b 能够沿着接触面进行滚动;相对来说,滚轮2b与接触面的摩擦力较小,不会磨损接触面或者损伤其他部件,而且相同条件下,滚轮滚动的速度更快。
193.在一些优选的方式中,如图5-6所示,运动模块外端部设有开口3b,用于放置滚轮2b。开口3b的横向尺寸略大于滚轮面的横向尺寸,这样使得滚轮2b恰好能够位于此开口3b处,但不能横向移动、左右振荡。在一些优选的方式中,运动模块外端部设有轴孔4b,用于固定安装滚轮连接轴41b,滚轮2b能够绕滚轮连接轴41b转动。在一些优选的方式中,滚轮面凸出于运动模块外端部,这样使得只有滚轮2b与接触面接触,滚轮2b沿着接触面滚动时,其他部件不与接触面接触,不会影响滚轮2b的滚动,而且在滚轮2b滚动时,不会损坏、磨损运动模块上的其他部位。
194.在一些优选的方式中,运动模块安装有滚动元件的那一端设有凸块。所述凸块用于与其他部件(比如干涉块的第二干涉部位)发生干涉,发生干涉后,可以改变运动模块在前后方向上的位置,(如图6(1)所示,x轴方向表示前后方向,)进而能够改变移虫针20向前或者向后摆动的角度(或者倾斜的角度),即能够改变移虫针20与竖直轴线之间的夹角,如图 10所示。在一些优选的方式中,如图5所示,运动模块安装有滚动元件的那一端设有凸块 5b;凸块5b的设置不影响滚动元件在引导面(或者接触面)上滚动。在一些实施方式中,凸块5b的凸起方向与滚轮连接轴的轴向方向一致。在另一些实施方式中,凸块5b的凸起方向与滚轮连接轴的轴向方向垂直,如图5(2)所示,在一些优选的方式中,凸块5b上连接有安装部件5m,在其他一些优选的方式中,凸块5b另一侧上连接有安装部件5m,如图5 (3)所示。在一些优选的方式中,如图5(2)所示,凸块端部连接有滚轮,所述滚轮与其他部件接触时,不会产生较大的磨损。
195.在一些优选的方式中,运动模块远离滚动元件的那一端设有连接元件。在一些优选的方式中,如图5所示,连接元件为连接柱6b,连接柱6b用于连接其他部件。
196.在一些优选的方式中,运动模块安装有滚轮2b的那一端具有斜面7b,如图5所示。当滚轮2b的接触面为斜面时,运动模块上的斜面7b能够与该接触面相匹配;如果滚轮2b的接触面是斜面,运动模块安装有滚轮2b的那一端还是平面,那么滚轮2b在滑动的过程中,平面会与接触面(即斜面)发生干涉,影响滚轮2b的移动,磨损接触面与运动模块。
197.本实施例中的其他实施方式可以与实施例1-2相同或者采用与实施例1-2相类似的方式。
198.实施例4
199.在一些实施例中,如图11所示,时规被竖直安装在支撑架9上;如图12所示,从上到下,引导面1a依次包括第一平面4a(即第一竖直面)、弧形面5a、第一倾斜面2a、第二平面6a(即第二竖直面)、第二倾斜面7a,滚轮2b能够沿着引导面1a向下进行滑动,在滑动过程中,弹簧与移虫针20状态在不断变化。滚轮2b沿着第一平面4a滑动过程中,滚轮2b 与第一平面4a接触,弹簧处于压缩状态、移虫针上段21向后倾斜,移虫针的移虫元件4f 向前伸出;滚轮2b沿着过渡面(即弧形面5a与第一倾斜面2a)滑动过程中,弹簧逐渐弹回,移虫针上段21逐渐向前至恢复竖直,然后向前倾斜,移虫针下段的移虫元件4f向后伸出;滚轮2b沿着第二平面6a(即第二竖直面)滑动过程中,滚轮2b与第二平面6a接触,弹簧处于轻微的压缩状态,移虫针20向前倾斜,移虫针的移虫元件4f向后伸出;滚轮2b 在第二倾斜面7a滑动过程中,滚轮2b与第二倾斜面7a接触,弹簧处于轻微的压缩状态或者弹簧处于自由长度,移虫针20向前倾斜,倾斜角度增大,移虫针的移虫元件4f向后伸出。
200.在一些优选的方式中,如图13所示,该引导机构包括第四电机8a,第四电机8a上连
接有摆动块9a,第四电机8a能够控制摆动块9a摆动或者静止,在一些优选的方式中,如图12(1)所示,时规上设有第一安装部位10a,用于安装第四电机8a。
201.在一些优选的方式中,如图12所示,时规上设有让位结构11a。在一些优选的方式中,时规上设有第二安装部位。在一些优选的方式中,第二安装部位包括连接轴12a。
202.在一些优选的方式中,该引导机构还包括干涉块13a,干涉块13a与时规连接,干涉块 13a能够安装在第二安装部位,具体地,如图13所示,干涉块13a中间部位设有第二连接孔14a,连接轴12a能够穿过第二连接孔14a,实现干涉块13a与时规的连接,两者连接或者结合之后,干涉块13a能够处于某一位置,当有一定大小的作用力作用于干涉块13a,干涉块13a能够绕连接轴12a摆动。
203.在一些优选的方式中,如图13所示,干涉块13a的上端部分位于让位结构11a处,便于干涉块13a摆动,同时能够限制干涉块13a摆动的范围。
204.在一些优选的方式中,如图13所示,干涉块13a一端设有第一干涉部位15a,另一端设有第二干涉部位16a。第一干涉部位15a被配置为能够与第四电机8a上的摆动块9a发生干涉;第二干涉部位16a被配置为能与凸块5b发生干涉;如图18所示,当电机8a带动摆动块9a转动时,摆动块9a向外拨动干涉块13a的第一干涉部位15a,干涉块13a转动,干涉块13a的第二干涉部位16a向内部按压凸块5b,使得运动模块向滑槽内部滑动,移虫针上段21向后摆动(即向后倾斜),移虫针的移虫元件4f向前伸出,挖取蜂虫。
205.在其他实施方式中,如图12所示,第四电机没有被设置在时规上,第四电机被设置在运动模块一侧,如图5(2),第四电机能够随运动模块移动而移动。因此第四电机可以实时控制移虫针的推舌7m处于推出或者正常状态。
206.本实施例中的其他实施方式可以与实施例1-3相同或者采用与实施例1-3相类似的方式。
207.实施例5
208.在一些优选的方式中,该移虫机构还包括高度调节机构,高度调节机构能够用于调节安装机构的高度,使移虫针处于不同高度,改变移虫针20与巢房之间的竖直距离,便于移虫针20进入巢房挖取蜂虫,以及挖到蜂虫之后离开巢房。
209.在一些优选的方式中,安装机构与高度调节机构连接,使得移虫针20能够进行向上或者向下移动,处于不同的高度。
210.在一些优选的方式中,如图18所示,高度调节机构包括第一齿轮8e、第一齿合板9e;第一齿轮8e与第一齿合板9e相互配合,能够用于调节安装机构的高度,进而调节移虫针的高度。在其他实施方式中,也可以采用其他方式实现高度调节,比如可以采用齿轮、传动带等来实现移虫针高度的调节。
211.在一些优选的方式中,高度调节机构还包括第一电机7e,能够用于提供动力,带动第一齿轮转动。在其他实施方式中,不采用电机,可以采用其他的机械装置进行驱动,使第一齿轮转动。
212.在一些优选的方式中,高度调节机构还包括移动架、移动块1e与连接件6e。在一些优选的方式中,移虫机构还包括支撑架9,支撑架9上连接有立柱2e。
213.在一些优选的方式中,如图11所示,立柱2e与支撑架通过连接部件或者连接杆等固定连接,移动块1e与移动架连接固定,移动块1e还与立柱2e滑动连接,使得移动架能够相
对于立柱2e向上或者向下移动。第一齿合板9e、连接件6e分别与移动架连接固定,移动架移动。第一电机7e固定连接在支撑架9上,第一电机7e连接第一齿轮8e。第一电机7e 提供动力,能够带动第一齿轮8e转动。第一齿轮8e能够与第一齿合板9e接触齿合,当第一电机7e转动,第一齿轮8e转动,第一齿合板9e能够向上或者向下移动(第一齿轮顺时针转动或者逆时针转动时,第一齿合板能够向下或者向上移动,移动架能够向下或者向上移动)。
214.在一些优选的方式中,第二安装机构与移动架固定连接,(本实施例中,如图11所示,第二安装机构与连接件6e连接固定,连接件6e与移动架连接固定。第二安装机构能够随移动架的移动而移动,使得移虫针能够随之进行向上或者向下移动。
215.在一些优选的方式中,支撑架9上部设有第一限位部件,下部设有第二限位部件,限位部件的设置能够使移动块1e在一定范围内上下移动,移虫针20能够在一定范围内移动,避免过度移动,超出合适范围,损害移虫针20。
216.在一些优选的方式中,立柱2e固定连接在支撑架9上,移动块1e能够与立柱2e滑动连接,能够沿着立柱2e上下滑动,在一些优选的方式中,立柱2e两侧设有滑槽,移动块 1e上设有与之相匹配的凸起,凸起与滑槽配合,能够实现移动块1e在立柱2e上滑动。本实施例中,如图11所示,高度调节机构还包括两根立柱2e,在其他实施方式中,可以设置一根立柱或者大于两根立柱;在一些实施方式中,可以根据实际需要设置一个或者一个以上的移动块。本实施例中,如图11,16所示,高度调节机构包括四个移动块,其中两个移动块位于同一根立柱上(两个移动块分别位于同一个立柱的不同位置),另外两个移动块位于同一根立柱上(两个移动块分别位于立柱的不同位置)。在一些优选的方式中,立柱与移动架不会相互干涉,本实施例中,移动架的架体位于两根立柱的中间空位处,立柱不影响移动架进行向上或者向下移动。
217.在一些优选的方式中,移动块固定连接在移动架上,当第一电机7e转动,第一齿轮8e 转动,第一齿合板9e能够向上或者向下移动,移动架能够向上或者向下移动,移动块能够在立柱上向上或者向下滑动,与移动架相连接的固定机构、第二安装机构能够进行向上或者向下移动,能够改变移虫针的竖直位置(即改变移虫针的高度)。
218.在其他实施方式中,如图23所示,高度调节机构包括动力传递装置与移动架,动力传递装置与移动架连接,移虫针与移动架连接,移动架内部设有缓冲元件,所述缓冲元件可以是弹性件或者其他具有时间缓冲作用的结构或者装置。
219.在一些优选的方式中,高度调节机构包括动力装置,动力装置与动力传递装置连接,动力装置可以是电机,本实施例中,如图23所示,动力装置采用第一电机7e;在其他实施方式中,可以不采用电机,而是采用其他的机械装置进行驱动。动力装置能够将动力传递给动力传递装置,移动架能够在动力装置的驱动下进行移动,移虫针能够随之进行向上或者向下移动,进而实现调节移虫针处于不同的高度。
220.在一些优选的方式中,动力传递装置包括第一齿轮8e、第一齿合板9e、移动块1e;在其他实施方式中,也可以采用其他方式来实现动力的传递,比如可以采用齿轮、传动带等。
221.本实施例中,如图23所示,第一齿轮8e与第一电机7e连接,第一齿轮8e与第一齿合板9e接触连接,第一齿合板9e与移动架1h连接(第一齿合板9e与移动架1h固定连接在一起,或者两者可以是一体成型),移虫针与移动架1h直接或者间接连接,移动架1h还与移动块1e
(或者击打)凸块5b,运动模块向后移动,移虫针摆动,移虫针上段向后倾斜,移虫元件向前移动,挖取蜂虫,而后,使移虫针向上移动。理论上,第四电机8a启动,干涉块要同步按压凸块5b,使移虫元件挖取蜂虫,同时使移虫针向上移动,但是实际情况下,第四电机8a会启动有反应时间,干涉块按压凸块5b,使移虫元件挖取蜂虫也需要相应的时间,所以需要最初移虫针向上移动时,有一定的时间延迟,避免出现这样的现象:移虫元件还没有挖取蜂虫,移虫针就已经向上移动,脱离了巢房。弹性件8m的设置,使得移虫元件能够较好地挖取蜂虫,有效地挖虫,避免挖不到蜂虫,就离开的现象。
230.在一些优选的方式中,移动架1h上连接有放虫机构。移动架1h上连接有第二电机3e,第二电机3e可以直接或者间接连接在竖向支架2h上,第二电机3e还连接摆动件,摆动件连接有按压平板,用于向下按压移虫针上端,使推舌7m向下移动,使蜂虫脱离移虫元件。
231.本实施例中的其他实施方式可以与实施例1-4相同或者采用与实施例1-4相类似的方式。
232.实施例6
233.在一些优选的方式中,移虫机构包括放虫机构,放虫机构可以采用电机控制推舌向下移动,将蜂虫推出,离开移虫元件,实现放虫操作,比如,采用图24(2)中所示的电机3e,击打移虫针上端,使推舌向下移动,蜂虫离开移虫元件。当然也可以采用其他的方式实现放虫。
234.一种具体实施方式中,如图11所示,放虫机构包括第二电机3e、第二齿轮4e、第二齿合板5e,三者相互配合,可以被用于放虫操作,即将移虫元件4f上的蜂虫,放入台基条的培养碗中。
235.在一些优选的方式中,第二电机3e固定连接在移动架上,第二电机3e与第二齿轮连接,第二电机能够带动第二齿轮转动,第二齿轮4e能够与第二齿合板5e齿合连接。在一些优选的方式中,如图11所示,连接件6e具有多段连接结构,连接件6e能够与第二安装机构连接(即连接件与第二安装机构中的第一连接段5c、第二连接段6c通过螺钉或者螺栓连接),同时连接件6e与移动块1e连接,连接件6e与移动架连接,连接件6e还与第二齿合板5e 连接。在一些优选的方式中,第二齿合板两个侧面均设有卡条,连接件设有开槽,第二齿合板卡接在连接件的框架内,第二齿合板能够沿着开槽向上或者向下滑动。当第二电机3e启动,第二齿轮能够转动,相应地,第二齿合板5e能够向上或者向下移动,第二齿合板5e底部设有平板,第二齿合板向下运动至移虫针上方,第二齿合板再继续向下移动,平板能够抵住移虫针上端,按压移虫针,使得推舌7m向下移动,推动移虫元件表面的蜂虫与蜂王浆,使得蜂虫与蜂王浆脱离移虫元件4f,进入台基条的培养碗中。在一些优选的方式中,第二齿合板上设有限位凸起,该凸起能够与连接件发生干涉,避免第二齿合板继续向上移动,脱离连接件。本实施例中,如图18所示,限位凸起位于第二齿合板中部偏下的部位,使得第二齿合板能够向上移动较大的距离。在不放虫的时候,第二齿合板底部的平板位于移虫针上端一定距离,不会按压移虫针上端,不与移虫针上端发生干涉,不影响移虫针移虫操作。
236.本实施例中的其他实施方式可以与实施例1-5相同或者采用与实施例1-5相类似的方式。
237.实施例7
238.在一些优选的方式中,该移虫机构还包括水平位置调节机构,水平位置调节机构
能够用于调节安装机构的水平位置,使移虫针20处于不同水平位置处,改变移虫针移虫元件4f与巢房之间的水平距离,便于移虫针20在水平方向上移动对准目标巢房,挖取蜂虫。
239.在一些优选的方式中,水平位置调节机构包括前后位置调节机构和左右位置调节机构,所述前后位置指的是图6中x轴所表示的方向。所述左右位置即图6中y轴所表示的方向。
240.所述目标巢房指的是:巢房内部含有蜂虫的巢房。如图16所示,水平方向上(即左右方向上),设有多排巢房,每排包括多个巢房,这些巢房中,有的含有蜂虫,有的没有蜂虫。
241.在一些优选的方式中,如图16所示,水平位置调节机构(此处水平位置调节机构指的是前后位置调节机构),水平位置调节机构可以采用齿轮、齿合板等实现位置调节,或者采用齿轮、传动带等或者采用丝杆、丝杆套等实现位置调节。
242.在具体实施方式中,前后位置调节机构包括第三电机1d、第三齿轮2d、第三齿合板3d、平移板4d,水平位置调节机构被配置为能够调节、改变移虫针水平方向的位置(即前后方向的位置)。在一些优选的方式中,第三电机1d固定安装在机架的支撑板5d上,支撑板5d 的高度低于平移板的高度,这样使得平移板与支撑板之间留有一段距离,平移板移动时,第三齿合板不会与支撑板发生干涉,不会影响平移板的移动。
243.在一些优选的方式中,如图16-17所示,第三齿轮2d与第三电机1d连接,第三电机 1d能够带动第三齿轮2d转动,第三齿合板3d与第三齿轮2d相互接触齿合,第三齿轮2d 转动能够带动第三齿合板3d相对第三电机1d向前或者向后移动。在一些优选的方式中,如图17所示,第三齿合板3d与平移板4d连接固定,平移板4d能够随着第三齿合板3d的移动而移动。在一些优选的方式中,平移板4d与支撑架9直接或者间接连接固定,平移板4d 向前或者向后水平运动时,能够带动支撑架9向前或者向后移动,那么,与支撑架9相连接的部件,也能够进行水平移动,因此移虫针20能够进行向前或者向后水平移动。在移虫过程中,移虫针20既能够进行向上或者向下移动,也能够进行向前或者向后的平移运动,还可以进行向前或者向后倾斜摆动(即随着运动模块在滑槽中移动)。
244.在一些优选的方式中,左右位置调节机构可以采用现有技术中常规的位置调节机构(图中未示出),主要包括第五电机、第四齿轮、第五齿轮、传送带、滑轨、滑块、连接结构等。第五电机与第四齿轮连接,传送带分别与第四齿轮、第五齿轮连接,滑块与滑轨滑动连接,滑块还与支撑加连接,连接结构与传送带连接,连接结构与支撑架连接。第五电机能够带动第四齿轮转动,传送带随之移动,第五齿轮转动,与传送带连接的连接结构和支撑架随之移动,滑块随支撑架移动而沿着滑轨滑动,进而能够调节移虫针在左右方向上的位置。
245.本实施例中的其他实施方式可以与实施例1-6相同或者采用与实施例1-6相类似的方式。
246.实施例8
247.一种移虫方法,所述方法模拟手动移虫操作,可以采用以上所述的移虫机构,具体包括以下步骤:
248.(1)使移虫针20位于第一位置w1,所述第一位置w1指的是:移虫针20向后倾斜,移虫元件4f向前倾斜,移虫针20的移虫元件4f的方向相对于竖直方向向前倾斜一定角度;
249.(2)使移虫针20位于第二位置w2,所述第二位置w2指的是:移虫针20向前倾斜,移虫元件4f向后倾斜,移虫针的移虫元件4f的方向相对于竖直方向向后倾斜一定角度;
250.(3)使移虫针20再次处于第一位置w1,在第二位置w2变化到第一位置过程中,完成挖虫。移虫针位于第一位置w1时,移虫针20向后倾斜,移虫针20的移虫元件4f相对于竖直方向向前倾斜一定角度,挖取蜂虫。
251.在一些优选的方式中,步骤(1)-(3)中,所述一定角度为5
°‑
30
°
。
252.在一些优选的方式中,步骤(1)中,使移虫针20位于第一位置w1,然后使移虫针20 向下移动。
253.在一些优选的方式中,步骤(2)中,如图14-15所示,使移虫针20由第一位置w1改变到第二位置w2的过程中,将移虫针20向后水平移动,同时移虫针向下移动。
254.在一些优选的方式中,步骤(2)中,使移虫针20由第一位置w1改变到第二位置w2 的过程中,(图10是移虫针20只进行前后摆动时,倾斜角度改变的示意图,图中,移虫针 20倾斜的角度为10
°
,由图可知,移虫针20摆动,由第一位置w1改变到第二位置w2,中间经历了中间位置wg,由于支点几乎不动,移虫针20由向后倾斜变为向前倾斜,那么支点下方的移虫元件4f由原来的向前倾斜变为向后倾斜),移虫针20向下移动同时移虫针整体向后水平移动,如图14所示,移虫元件4f进入巢房内,移虫元件4f是倾斜一定角度,并且贴着巢房内壁进入巢房中的,不是直上直下地,从巢房中间位置进入巢房。图14中,最初没有显示出移虫针处于位置w1,但是移虫针可以由位置w1开始,逐渐向下移动,并且移虫针摆动,移虫元件4f向后倾斜至位置(a),然后移虫元件4f继续向下移动,向后倾斜至位置(d),位置w2可以是位置(d),也可以是位置(c)-(d)之间的某一位置状态,当移虫元件4f位于位置w2时,移虫元件前端是弯曲的,贴合巢房底部。移虫元件与巢房的相对位置关系如图26所示,图26中,第二位置w2可以是(3)处所表示的状态。
255.在一些优选的方式中,步骤(3)中,如图14-15所示,使移虫针20由第二位置w2改变到第一位置w1的过程中,移虫元件弯曲,移虫针摆动,移虫元件4f向前移动,移虫元件4f拨动含有蜂虫的蜂浆,并使含有蜂虫的蜂浆粘附在移虫元件4f上,然后将移虫针20 向后水平移动同时向上,移虫针带着蜂虫与蜂浆,脱离巢房。
256.在一些优选的方式中,移虫元件上负载有蜂虫之后,移虫针20沿着引导面向上移动,使移虫针20再次摆动,移虫元件向后倾斜,与步骤(1)中移虫针20位于第一位置w1时的状态一致。
257.在一些优选的方式中,移虫针20脱离巢房后,向上移动至移虫针20重新处于第一位置 w1,使移虫针20向前移动到台基条处,对准培养碗,此时,第二电机3e启动,第二齿轮转动,相应地,第二齿合板5e能够向下移动,第二齿合板5e底部的平板抵住移虫针上端,按压移虫针,使得推舌7m向下移动,推动移虫元件表面的蜂虫与蜂王浆,使得蜂虫与蜂王浆脱离移虫元件4f,进入台基条的培养碗中。
258.在一些优选的方式中,放虫过程中,移虫针向下移动,倾斜着进入培养碗。在一些优选的方式中,放虫过程中,移虫元件接触培养碗底部之后,蜂虫被推出,移虫针向上移动,同时向后移动。
259.采用移虫机构进行移虫的过程如图14,26所示;
260.步骤(1)的具体过程为:移虫针20位于第一位置w1后,第一齿合板向下移动,相应地,移虫针20向后倾斜着向下移动。
261.因为移虫针上段21被安装在运动模块内部,移虫针安装结合部83与第一安装机构
结合,运动模块上的滚轮2b与时规的引导面1a接触,滚轮2b在第一平面4a上向下滑动,此过程中,弹簧处于压缩状态,移虫针20位于第一位置w1:移虫针20向后倾斜,移虫针的移虫元件4f(即移虫针挖虫部分)向前伸出。
262.步骤(2)的具体过程为:移虫针20向下移动,同时平移板向后移动(相应地移虫针向后移动),此过程中,滚轮2b沿着时规的过渡面(弧形面5a与第一倾斜面2a)滑动,又沿着时规的第二平面6a滑动(滚轮2b在第二平面6a滑动时,移虫元件可以是处于图26中位置(4)),最终滑动到时规的第二倾斜面7a,此过程中,弹簧逐渐弹回,移虫针20摆动,移虫针上段逐渐向前摆动恢复至竖直(即中间位置wg),然后移虫针上段向前倾斜,移虫元件4f(即移虫针挖虫部分)向后伸出(即第二位置w2);移虫元件4f向下移动进入巢房内。图14中,第二位置w2可以是d处所表示的状态,图26中,第二位置w2可以是(3)处所表示的状态,移虫针处于第二位置w2时,滚轮2b位于时规的第二第二倾斜面7a处。
263.步骤(3)的具体过程为:如图11(1)所示,由于滚轮2b位于第二倾斜面7a处,此时第四电机8a控制干涉块13a摆动,干涉块13a的第二干涉部位16a按压凸块5b,运动模块向滑槽内部滑动,相应地,移虫针20摆动,移虫针上段向后倾斜(弹簧处于压缩状态),如图14,26所示,移虫元件4f(即移虫针挖虫部分)向前翘起,同时平移板向前移动(相应地移虫针向前移动),使移虫针向上移动,将蜂虫连同少量蜂王浆挖起来。在其他实施方式中,如图24所示,启动第四电机8a,第四电机8a转动,击打或者按压凸块5b,使得运动模块向滑槽内部滑动,相应地,移虫针20摆动,移虫针由第二位置w2变为第一位置w1。
264.移虫元件上负载有蜂虫之后,使移虫针20向后移动,同时沿着引导面1a继续向上移动,脱离巢房,移动至时规的第一平面4a,此时移虫针20的状态与步骤(1)中移虫针20位于第一位置时的状态一致。
265.进一步地,放虫过程中,移虫元件接触培养碗内壁之后,使移虫针向上移动,同时向后移动,移虫元件背部在培养碗边缘处刮一下,如图28所示,(5)之后的某一时刻,刮掉移虫元件背部粘的蜂王浆,然后移虫针继续向上与向后移动离开培养碗。
266.采用本实用新型的移虫机构与移虫方法,移虫成功率高达90%以上,最终的移虫成活率也较高。相对于传统的直上直下地移虫方法,本实用新型的移虫方法能够保护移虫针,延长移虫针的使用寿命。
267.实施例9
268.一种移虫方法,所述方法模拟手动移虫操作,如图27所示,可以采用以上所述的移虫机构,具体包括以下步骤:
269.(1)使移虫针20位于第一位置w11,所述第一位置w11指的是:移虫针20向后倾斜,移虫元件4f向前倾斜,移虫元件4f的方向相对于竖直方向向前倾斜一定角度,移虫针的推舌7m处于向下推出的状态(即放虫时的状态),推舌7m紧贴移虫元件,这样使得移虫元件具有一定的刚性,移虫元件4f是直的,非弯曲状态,这样能够使得移虫元件接触巢房内壁时,移虫元件是直的,不发生弯曲,当推舌7m向上移动过程中,移虫元件向前弯曲,可以有效地挖取蜂虫,避免移虫元件接触巢房内壁时,向后弯曲,不能挖取蜂虫。
270.(2)使移虫针20位于第二位置w22,所述第二位置w22指的是:移虫针20向前倾斜,移虫元件4f向后倾斜,移虫元件4f的方向相对于竖直方向向后倾斜一定角度;移虫针的推舌7m处于向下推出的状态(即放虫时的状态),推舌7m紧贴移虫元件,这样使得移虫元件具
所示,放虫过程中:使移虫针20向前移动到台基条处,对准培养碗,移虫针向下移动,倾斜着进入培养碗,移虫元件接触培养碗时,移虫元件向前倾斜,然后,第二电机3e启动,第二齿轮转动,相应地,第二齿合板5e向下移动,第二齿合板5e底部的平板抵住移虫针上端,按压移虫针(按压移虫针的操作,也可以直接采用电机3e来完成,如图24所示),使得推舌7m向下移动,推动移虫元件表面的蜂虫与蜂王浆,使得蜂虫与蜂王浆脱离移虫元件 4f,进入台基条的培养碗中。
283.进一步地,放虫过程中,移虫元件接触培养碗内壁之后,使移虫针向上移动,同时向后移动,移虫元件背部在培养碗边缘处刮一下,如图28所示,(5)之后的某一时刻,刮掉移虫元件背部粘的蜂王浆,然后移虫针继续向上与向后移动离开培养碗。
284.采用本实用新型的移虫方法,移虫成功率高达95%以上,最终的移虫成活率也较高。相对于传统的直上直下地移虫方法,本实用新型的移虫方法能够保护移虫针,延长移虫针的使用寿命,而且可以避免伤害蜂虫。
285.实施例10
286.一种用于移虫的检测装置,包括用于采集巢房中蜂虫信息的采集元件、用于检测巢房中蜂虫的检测元件。采集元件能够将采集到的信息传递给检测元件,检测元件能够对接收到的信息进行分析,得到检测结果。
287.在一些优选的方式中,还包括用于识别移虫针或者巢房所处位置的定位元件。定位元件可以采用位置传感器等。
288.在一些优选的方式中,采集元件采用摄像装置,被配置为能够拍摄巢房内部照片,并能够将照片信息传输至检测元件,检测元件可以对照片进行分析,得出检测结果,即巢房中是否有蜂虫。摄像装置可以采用摄像头等,也可以采用现有技术中常规的能够拍照的装置。在一些实施方式中,检测元件包括图像分析单元,图像分析单元包括但不限于gpu服务器,以及运行在gpu服务器上的有无蜂虫的检测模块,检测模块能够对图像数据进行分析,在大量的训练数据集的基础上训练出高精度模型对图像数据进行检测。
289.本实用新型不对摄像装置、检测元件、位置传感器等本身的结构进行改进,本实用新型只是采用现有的装置与技术来实现检测蜂虫的目的。
290.在一些具体实施方式中,如图18所示,一种用于移虫的检测装置,包括采集元件、位置传感器等;移虫机构包括外壳1f,所述外壳与支撑架连接,外壳两侧连接有安装结构,安装结构包括第一安装结构2f与第二安装结构5f,所述第一安装结构2f能够被用于安装采集元件;第二安装结构能够用于安装位置传感器,可以用于识别移虫针或者巢房所处的位置,便于调节移虫针的位置,进行移虫操作。
291.本实施例中的其他实施方式可以与实施例1-7相同或者采用与实施例1-7相类似的方式。
292.实施例11
293.在其他实施方式中,一种用于移虫的检测装置,如图25所示,包括滑动支架、用于采集巢房中蜂虫信息的采集元件、用于检测巢房中蜂虫的检测元件,采集元件被安装在滑动支架上,滑动支架包括滑动件,滑动件能够沿着滑道进行滑动,采集元件能够随之移动。
294.在一些优选的方式中,还包括用于识别移虫针或者巢房所处位置的定位元件。
295.在一些方式中,采集元件采用摄像装置,用于拍摄巢房内部照片,定位元件采用位
置传感器。检测元件包括图像分析单元,图像分析单元包括但不限于gpu服务器,以及运行在 gpu服务器上的有无蜂虫的检测模块,检测模块对图像数据进行分析,在大量的训练数据集与验证数据集的基础上训练出高精度模型对图像数据进行检测。
296.本实用新型不对摄像装置、检测元件、位置传感器等本身的结构进行改进,本实用新型只是采用现有的装置与技术来实现检测蜂虫的目的。
297.在一些优选的方式中,如图25所示,所述滑动支架包括第一安装臂6k与第二安装臂7k,摄像装置安装在第一安装臂上,位置传感器2k安装在第二安装臂和/或第一安装臂上。在一些实施方式中,位置传感器的数量可以是一个或者多个。当滑动件5k沿着滑道进行滑动,所述滑道与左右位置调节机构中的滑轨平行设置。摄像装置与位置传感器2k能够随之移动。
298.在一些优选的方式中,第一安装臂6k上的侧面连接有安装件4k,摄像装置能够被安装在安装件4k的摄像装置安装部位。
299.在一些优选的方式中,第一安装臂6k与第二安装臂7k间隔一定距离,两者相对设置。
300.在一些优选的方式中,所述检测装置还包括卡接结构,所述卡接结构包括卡接部位。
301.在一些方式中,如图23所示,卡接结构固定连接在支撑架上,所述卡接结构不与高度调节机构发生干涉。在一些优选的方式中,如图23所示,卡接结构具有卡接部位1k,被配置为能够与其他部件进行卡接连接。在一些优选的方式中,所述卡接部位1k为弧形卡接部位1k,弧形卡接部位1k与待卡接部件的结合比较紧密,能够较好地将待卡接部件与支撑架连接在一起。
302.在一些优选的方式中,如图25所示,第一安装臂6k上连接有卡接件3k,所述卡接件 3k能够与卡接部位1k相配合,实现卡接连接。在一些优选的方式中,所述卡接件3k具有弧形面,所述弧形面能够与弧形卡接部位1k结合。
303.当卡接结构与卡接件3k结合,移虫针在左右位置调节机构的驱动下,进行左右移动时,摄像装置与位置传感器2k能够随之进行左右移动。由于摄像装置与位置传感器2k没有与支撑架固定连接,那么当移虫针在沿着立柱2e进行上下移动时,不会影响摄像装置与位置传感器2k,移虫针向上或者向下移动引起的震动对摄像装置、位置传感器2k的影响较小,可以保护摄像装置与位置传感器2k,不影响其工作,延长他们的使用寿命。现有技术中,有的移虫机构将摄像装置、位置传感器2k与移虫针均安装在同一安装机构中,这样会使得摄像装置、位置传感器2k要随着移虫针进行向上或者向下的移动,会使得摄像装置、位置传感器2k容易受到移动过程中的震动,与摄像装置、位置传感器2k相连的部件,也容易在频繁的向上或者向下移动过程中,受到震动或者磨损。
304.本实施例中的其他实施方式可以与实施例1-7相同或者采用与实施例1-7相类似的方式。
305.本领域的技术人员应该明白,以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
306.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并
不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1