虾处理机器和用于虾处理机器的断头系统的制作方法
虾处理机器和用于虾处理机器的断头系统
1.相关申请的交叉引用
2.本技术要求2020年3月9日提交的第62/987,074号美国临时申请和2020年11月20日提交的第63/116,567号美国临时申请的权益,每个临时申请的全部内容以引用的方式明确地并入本文中。
技术领域
3.本公开大体上涉及一种用于处理具有头部和身体的虾的虾处理机器,且更具体来说,涉及一种用于处理头部并将头部与身体分离的半自动机器。
背景技术:
4.在历史上,对虾进行手工处理以准备销售给消费者并食用。近年来,在处理设施中已经实施各种类型的自动或半自动虾处理机器,它们能够部分地或完全地去除虾的壳,因此准备虾肉用于销售、烹饪和/或食用。这些机器中的一些还具有可在期望位置处切割虾肉的切割能力。此类机器可以减少总体处理时间且提供一致的处理结果。
技术实现要素:
5.在本公开的一些实施例中,一种虾处理机器包含框架组合件以及与所述框架组合件可操作地联接的处理组合件。处理组合件包含驱动组合件、夹持机构和肉分拣构件。驱动组合件与框架组合件可操作地联接。夹持机构适合于接合虾。断头系统适合于将虾体与虾头分离。
6.在一些实例中,断头系统可以包含相对于夹持机构可移动的肉分拣构件,所述肉分拣构件适合于沿着路径前进以刺穿虾体并将虾体与虾头分离。
7.在一些实例中,处理组合件进一步包含与驱动组合件可操作地联接的托架构件。托架构件包含虾支撑表面,所述虾支撑表面适合于至少部分地支撑虾体或虾头中的至少一个。在一些实例中,托架构件包含用于容纳虾头的部分的凹进区域。
8.在一些方法中,夹持机构可以与托架构件可操作地联接,并且可以包含至少一个夹销以与虾体或虾头中的至少一个接合。夹持机构可以适合于在肉分拣构件刺穿虾时保持虾头,由此将在肉分拣构件继续移动时将虾体与虾头分离。
9.在一些方法中肉分拣构件可以安装到与驱动组合件可操作地联接的摆动臂。此外,在一些实例中,肉分拣构件可以包含具有刺穿部分和滑动部分的分拣器臂。分拣器臂的滑动部分可以可滑动地接合虾并且分拣器臂的刺穿部分可以刺穿虾体。
10.在这些实例中的任一个中,虾处理机器可以另外包含可调整定位辊组合件,所述可调整定位辊组合件包含辊臂和辊体。可调整定位辊组合件可以将推力施加在虾上,以将虾定位在托架构件上。
11.在一些实例中,虾处理机器可以进一步包含适合于将虾在托架构件上对准的可调整引导构件。可调整引导构件可以包含第一引导构件主体和第二引导构件主体。第一引导
构件主体可以包含从此处延伸的第一引导叉,并且第二引导构件主体可以包含从此处延伸的第二引导叉。第一和第二引导构件彼此可操作地联接。第一和第二引导叉协作以将虾居中于托架构件上。在这些实例中的一些中,可调整引导构件可以进一步包含弹性构件,所述弹性构件与第一引导构件主体和第二引导构件主体可操作地联接以将推力施加在第一引导叉和第二引导叉上。
12.在这些实例中的一些中,可调整引导构件采用与框架组合件可操作地联接的支柱、与支柱可操作地联接的安装轴、第一安装盘和第二安装盘的形式。第一和第二安装盘中的每一个与安装轴可移动地联接并且协作以将虾居中于托架构件上。
13.在一些实例中,虾处理机器可以进一步包含切割装置,所述切割装置与驱动组合件可操作地联接以切割虾。切割装置可以相对于托架构件可移动地调整。
14.在一些实例中,断头系统可以包含安装构件、与安装构件可移动地联接的刀片,以及与刀片组合件可操作地联接的断头驱动组合件。刀片组合件包含在升高位置与降低位置之间可移动的刀片。断头驱动组合件包含齿轮以及与所述齿轮可操作地联接的凸轮构件。齿轮适合于与虾处理机器的主齿轮接合。凸轮构件与刀片组合件的部分可移动地联接,以在升高位置与降低位置之间推动刀片。
15.根据第二实施例,用于虾处理机器的断头系统包含安装构件、与安装构件可移动地联接的刀片,以及与刀片组合件可操作地联接的断头驱动组合件。刀片组合件包含在升高位置与降低位置之间可移动的刀片。断头驱动组合件包含齿轮以及与所述齿轮可操作地联接的凸轮构件。齿轮适合于与虾处理机器的主齿轮接合。凸轮构件与刀片组合件的部分可移动地联接,以在升高位置与降低位置之间推动刀片。
16.在这些实例中的一些中,刀片组合件包含与安装构件可操作地联接的细长轨道。刀片在轨道内可移动。此外,在一些实例中,刀片组合件可以包含与刀片可操作地联接的辊子。辊子可以包含适合于接合凸轮构件的凸轮接合部分。在一些方法中凸轮构件包含螺旋形主体,所述螺旋形主体限定适合于接合辊子的凸轮接合部分的凸轮面。
17.在一些实例中,刀片组合件包含适合于朝向降低位置偏置刀片的弹性构件。刀片可以包含细长构件,所述细长构件具有包含倾斜表面的第一端和第二端。刀片的第一端可以进一步包含从倾斜表面延伸的刀片尖端。在一些方法中,安装构件包含安装板,所述安装板具有至少一个安装区域以与虾处理机器的框架组合件固定。
附图说明
18.以上需要通过提供在以下详细描述中描述的虾处理装置,尤其在与附图结合研究时,而至少部分满足,其中:
19.图1示出根据各种实施例的实例虾处理机器的透视示意图;
20.图2示出根据各种实施例的已移除保护性覆盖物的图1的实例虾处理机器的透视图;
21.图3示出根据各种实施例的具有实例处理组合件的图1和2的实例虾处理机器的前透视图;
22.图4示出根据各种实施例的实例处理组合件的前透视图;
23.图5示出根据各种实施例的图3和4的实例处理组合件的特写前透视图;
24.图6示出根据各种实施例的图3到5的实例处理组合件的透视图;
25.图7示出根据各种实施例的图3到6的实例处理组合件的侧面视图;
26.图8示出根据各种实施例的图3到7的实例处理组合件的后正视图;
27.图9示出根据各种实施例的用于图3到8的实例处理组合件的实例夹持机构的前透视图;
28.图10示出根据各种实施例的图9的实例夹持机构的后透视图;
29.图11示出根据各种实施例的处于打开配置的图9和10的实例夹持机构的上部透视图;
30.图12示出根据各种实施例的图9到11的实例夹持机构的部分的前透视图;
31.图13示出根据各种实施例的图9到12的实例夹持机构的部分的后透视图;
32.图14示出根据各种实施例的图9到13的实例夹持机构的部分的下侧透视图;
33.图15示出根据各种实施例的图9到14的实例夹持机构的第二部分的后透视图;
34.图16示出根据各种实施例的图15的实例夹持机构的第二部分的前侧透视图;
35.图17示出根据各种实施例的图15和16的实例夹持机构的第二部分的下部后侧透视图;
36.图18示出根据各种实施例的用于图3到17的实例处理组合件的实例托架构件的侧面视图;
37.图19示出根据各种实施例的用于图3到18的实例处理组合件的实例可调整定位辊组合件的侧面视图;
38.图20示出根据各种实施例的实例肉分拣构件的侧面视图;
39.图21示出根据各种实施例的用于图3到21的实例处理组合件的实例可调整引导构件的前正视图;
40.图22示出根据各种实施例的图21的实例可调整引导构件的分解侧面正视图;
41.图23示出根据各种实施例的处于第一配置的图21和22的实例可调整引导构件的侧面视图;
42.图24示出根据各种实施例的处于第二配置的图21到23的实例可调整引导构件的侧面视图;
43.图25示出根据本公开的各种实施例的用于图3到21的实例处理组合件的替代可调整引导构件的侧面视图;
44.图26示出根据各种实施例替代实例虾处理机器的透视图,所述虾处理机器具有包含附件断头系统的替代处理组合件;
45.图27示出根据各种实施例的图26的实例虾处理机器的前透视图;
46.图28示出根据各种实施例的图26和27的实例处理组合件的前透视图;
47.图29示出根据各种实施例的图26到28的实例处理组合件的后透视图;
48.图30示出根据各种实施例的图26到29的实例处理组合件的实例断头系统的后透视图;
49.图31示出根据各种实施例的图30的实例断头系统的前透视图;
50.图32示出根据各种实施例的为了清晰起见已移除安装构件的图30和31的实例断头系统的前透视图;
51.图33示出根据各种实施例的图30到32的实例断头系统的后透视图;以及
52.图34示出根据本公开的各种实施例的图30到33的实例断头系统的实例刀片组合件的透视图。
53.技术人员应了解,图中的元件仅为简单和清晰起见而进行示出,并且不一定按比例绘制。举例来说,图中元件的一些的尺寸和/或相对定位可相对于其它元件放大以有助于改善对本发明的各种实施例的理解。另外,在商业上可行的实施例中为有用的或必要的常见但很好理解的元件通常未描绘以便于较少妨碍这些各种实施例的视图。还应当理解,可以特定的发生顺序描述或描绘某些动作和/或步骤,而本领域技术人员将理解,实际上不需要关于序列的这类特定性。还应当理解,除了不同的特定含义以在本文中另有阐述,否则本文使用的术语和表达具有如上所述的技术领域的技术人员对这类术语和表达所赋予的普通技术含义。
具体实施方式
54.一般而言,本公开涉及能够可调整地切割和分拣虾的至少半自动虾处理机器。更具体来说,虾处理机器能够将虾断头,也就是说,机器能够将虾体与虾头分离。因此,与需要人工断头的缺少这种能力的先前现有技术相比,可以大大减少处理时间。在一些实例中,可以将断头系统提供为可以安装到现有虾处理机器的改型附件。在其它实例中,虾处理机器可以在交付之前配备有安装在其上的断头系统。机器可以另外包含用于选择性地切割和处理各种大小的虾的任何数目的可调整组件。操作者可以快速接合可调整组件以快速选择所需的处理设置。
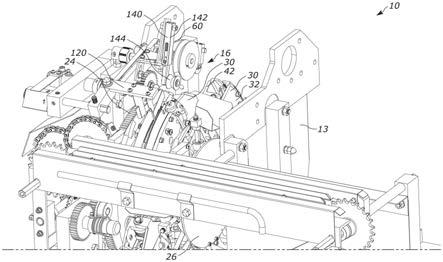
55.现参看图式,根据本公开的各种实施例构造虾处理机器10。机器10的一般构造和操作可以类似于以下各案中所公开的机器中的任何一个或多个:1956年5月3日提交的共同拥有的第2,850,761号美国专利;1963年1月28日提交的第3,214,789号美国专利;1966年3月8日提交的第3,238,561号美国专利;1966年4月26日提交的第3,247,542号美国专利;2001年3月27日提交的第6,533,651号美国专利;2001年3月27日提交的第6,485,363号美国专利;2009年3月12日提交的第7,867,067号美国专利;以及2017年1月9日提交的第9,833,005号美国专利;2020年3月9日提交的第62/987,004号美国专利申请;以及2020年4月27日提交的第16/859,495号美国专利申请,每个专利的全部内容明确地以引用方式并入本文中。
56.更具体来说,虾处理机器10包含壳体12、框架组合件13、多个个别装载托盘14,以及与框架组合件13可操作地联接的处理组合件16。此外,虾处理机器10包含与马达齿轮轮轴18a(图2)联接的马达18。壳体12限定用于接纳未经处理的虾2的料斗20。个别装载托盘14定位于传送机22上且邻近于料斗20移动。马达18致动传送机22和处理组合件16,使得在操作期间,将在装载托盘上运载的虾递送到处理组合件16以供处理。
57.处理组合件16包含采用主齿轮形式的驱动组合件24、任何数目的个别虾夹持机构30(例如,在两个与八个虾夹持组合件30之间)、可调整引导构件120、可调整定位辊组合件140,以及用于处理虾2的任何数目的工作台。驱动组合件24经由任何数目的支撑构件、托架、臂等与框架组合件13可操作地联接。处理组合件16包含可调整肉分拣构件160以及任何数目的附加工作台,例如,可调整刀具组合件、清洗台、去肠线台等,它们中的每一个可以安
置在主齿轮24周围。
58.如图2中所示,马达18经由主齿轮轮轴18a与马达齿轮18b可操作地联接,所述主齿轮轮轴与主齿轮24可操作地联接,使得其由马达18驱动。在操作期间,马达18驱动马达齿轮18a,且因此驱动主齿轮24,进而致使所述主齿轮在旋转方向上移动。主齿轮24与主齿轮轮轴19(图4)联接和/或由所述主齿轮轮轴支撑。
59.在主齿轮24旋转时,虾夹持机构30从装载托盘14下方经过。在每个夹持机构30经过托盘14时,夹持机构30抓住虾2。在虾2由夹持机构30保持的情况下,主齿轮24的继续旋转使虾2朝向工作台(即,可调整肉分拣构件160和任何其它工作台)移动以用于处理。
60.虾处理机器10包含还可以与主齿轮轮轴19可操作地联接的任何数目的驱动凸轮26。更具体来说,驱动凸轮26限定主齿轮轮轴19通过其插入的开口26a。此配置允许主齿轮轮轴19在驱动凸轮26保持固定时在驱动凸轮26的开口26a内旋转。驱动凸轮26包含采用从驱动凸轮26的主体向外延伸的突出表面形式的任何数目的接合区域28。
61.特别参考图6到19,夹持机构30具有第一端30a和第二端30b且包含主夹具31、小夹持组合件61和破尾器组合件81。主夹具31包含第一侧板32和第二侧板42。在所示实例中,第一侧板32和第二侧板42各自包含相应的下部部分32a、42a、相应的上部部分32b、42b、具有容纳夹持杆50的开口33a、43a的相应的至少一个支撑凸缘33、43。如此配置,第一侧板32和第二侧板42各自相对于夹持杆50可旋转。此外,第一侧板32和第二侧板42中的每一个包含定位于其下部部分32a、42a处或附近的驱动臂安装构件34、44,所述驱动臂安装构件包含孔34a、44a以接纳与减震器58联接的驱动臂56。
62.夹持机构30进一步包含采用扭力弹簧52形式的多个弹性构件,所述弹性构件被设定尺寸以围绕夹持杆50安置和/或与夹持杆50可操作地联接。在所示实例中,扭力弹簧52包含弹簧主体52a和多个接合臂52b,所述接合臂从弹簧主体52a向外延伸以接合第一侧板32和第二侧板42的下部部分32a、42a。由于接合臂52b的这种推动,向外推动第一侧板32和第二侧板42的下部部分32a、42a,使得第一侧板32和第二侧板42围绕夹持杆50枢转,由此使上部部分32b、42b以夹持运动朝向彼此向内移动。
63.第一侧板32和第二侧板42中的每一个包含定位于其上部部分32b、42b处或附近的夹持表面或部分36、46。更具体来说,夹持部分36、46沿着第一侧板32和第二侧板42的上部部分32b、42b的长度(例如,全部或基本上全部)延伸且“向内”面向彼此。在所说明的实例中,夹持部分36、46采用与第一侧板32和第二侧板42联接的不同托架构件的形式,但在其它实例中,夹持部分36、46可以与其一体地形成。夹持部分36、46包含任何数目的孔36a、46a以接纳采用圆锥形构件形式的夹销59。在所说明的实例中,夹持部分36、46包含跨越夹持部分36、46的全部或基本上全部长度延伸以接纳夹销59的孔36a、46a。此配置有利地增加在身体和头部区域处与虾2的接触,从而引起更牢固地保持虾2。在其它实例中,夹销59可以采用不同形状的形式。此外,在一些实例中,夹销59可以与夹持部分36、46一体地形成。
64.小夹持组合件61包含定位于夹持机构30的第一端30a处的第一端板62和第二端板72。第一端板62和第二端板72包含与第一侧板32和第二侧板42相似的特征。在所说明的实例中,第一端板62和第二断板72各自包含相应的下部部分62a、72a、相应的上部部分62、72b、具有容纳第二夹持杆51的开口63a、73a的相应的至少一个支撑凸缘63、73。如此配置,第一端板62和第二端板72各自相对于夹持杆51可旋转。此外,第一端板62和第二端板72中
的每一个包含定位于其下部部分62a、72a处或附近的驱动臂安装构件64、74,所述驱动臂安装构件包含孔64a、74a以接纳与相应减震器58联接的附加驱动臂56。
65.任何数目的先前描述的扭力弹簧52可以安置于夹持杆51上和/或与夹持杆51可操作地联接,以接合第一端板62和第二端板72。由于一个或多个扭力弹簧52的接合臂52b的这种推动,向外推动第一端板62和第二端板72的下部部分62a、72a,使得第一端板62和第二端板72围绕夹持杆51枢转,由此使上部部分62b、72b以夹持运动朝向彼此向内移动。
66.第一端板62和第二端板72中的每一个还包含定位于其上部部分62b、72b处或附近的夹持表面或部分66、76。更具体来说,夹持部分66、76沿着第一端板62和第二端板72的上部部分62b、72b的长度(例如,全部或基本上全部)延伸且“向内”面向彼此。在所说明的实例中,夹持部分66、76采用与第一端板62和第二端板72联接的不同托架构件的形式,但在其它实例中,夹持部分66、76可以与其一体地形成。夹持部分66、76包含任何数目的孔66a、76a以接纳先前所述的夹销59。在一些实例中,夹销59可以与夹持部分64、74一体地形成。
67.破尾器组合件81包含定位于夹持机构30的第一端30a附近的第一破开器臂82和第二破开器臂92。第一破开器臂82和第二破开器臂92包含与第一侧板32和第二侧板42以及第一端板62和第二端板72相似的特征。在所说明的实例中,第一破开器臂82和第二破开器臂92各自包含相应的下部部分82a、92a;相应的上部部分82、92b;相应的第一联接部分83、93,其采用容纳第一联接构件85、95以分别将第一侧板32和第二侧板42与其联接的开口形式;以及相应的第二联接部分83a、93a,其采用容纳第二联接构件85a、95a以分别进一步联接第一侧板32和第二侧板42并且限制其间的相对旋转的开口形式。如此配置,第一破开器臂82和第二破开器臂92各自相对于第一侧板32和第二侧板42可旋转。此外,第一破开器臂82和第二破开器臂92中的每一个包含定位于上部部分82b、92b处或附近的接合臂构件84、94。
68.采用片簧53形式的弹性构件可以与第一破开器臂82和第一侧板32可操作地联接。第二片簧53可以与第二破开器臂92和第二侧板42可操作地联接。这些片簧53向外或远离第一侧板32和第二侧板42推动第一破开器臂82和第二破开器臂92。由于片簧53的这种推动,向外推动第一破开器臂82和第二破开器臂92的上部部分82b、92b,使得第一破开器臂82和第二破开器臂92围绕第一联接构件85、95枢转,因此具有打开的搁置配置。
69.第一破开器臂82和第二破开器臂92中的每一个还包含定位于其上部部分82b、92b处或附近的夹持表面或部分86、96。更具体来说,夹持部分86、96沿着第一破开器臂82和第二破开器臂92的上部部分82b、92b的长度(例如,全部或基本上全部)延伸且“向内”面向彼此。在所说明的实例中,夹持部分86、96采用与第一破开器臂82和第二破开器臂92联接的不同托架构件的形式,但在其它实例中,夹持部分86、96可以与其一体地形成。夹持部分86、96包含任何数目的孔86a、96a以接纳先前所述的夹销59。在一些实例中,夹销59可以与夹持部分84、94一体地形成。夹持部分86、96分段成两个区段,所述两个区段相对于彼此可旋转以破开虾的壳,因此将虾壳与尾部壳分离。
70.如先前所描述,第一侧板32和第二侧板42、第一端板62和第二端板72,以及第一破开器臂82和第二破开器臂92中的每一个相对于相互可移动(除了相对于夹持杆50、51可移动之外),并且经由相应弹簧进行弹簧加载,使得主夹具31和端部夹具62朝向关闭位置偏置并且破尾器组合件81朝向打开位置偏置(参看图5、6、8、9和10)。在此配置中,夹销59在夹持机构30内夹持和保持虾2。将在下文进一步描述此布置。
71.特别参考图10和12到18,处理组合件16进一步包含多个托架构件100,每个托架构件与主齿轮24和夹持机构30可操作地联接。托架构件100大体上是砧座形的,且包含具有底座104和虾支撑区域106的主体102。底座104包含采用孔108形式的任何数目的安装构件以接纳用于将托架构件100与主齿轮24联接的螺栓或销(未示出)。在一些实例中,主齿轮24可以包含托架构件100可以可操作地联接到的安装板(未示出)。主体102进一步包含杆孔102a以接纳夹持杆50、51。
72.虾支撑区域106限定在处理期间虾2安置于其上的一个或多个表面。虾支撑区域106包含具有第一端106a和第二端106b的大体上弯曲表面。在处理期间,虾2位于在虾支撑区域106上的中心突起或脊部109上。第一端106a进一步限定凹进区域110,所述凹进区域允许虾2的头部在虾支撑区域106上定位成低于虾体。值得注意的是,凹进区域110具有分级斜率,因此允许与主夹具31联接的夹销59在此凹进区域110中抓住虾头。
73.如先前所述,主体102包含杆孔102a以接纳夹持杆50、51,由此将主夹具31和小夹持组合件61与其联接。更具体来说,夹持杆50穿过第一杆孔102a安置,并且主夹具31的第一侧板32和第二侧板42的支撑凸缘33、43与夹持杆50联接。此外,第二夹持杆51穿过第二杆孔102a安置,并且小夹持组合件61的第一端板62和第二端板72的支撑凸缘63、73与第二夹持杆51联接。任何数目的保持机构可以用于通过夹持杆50、51保持和/或固定支撑凸缘33、43、63、73。
74.参考图3到8和19,处理组合件16包含对准布置,所述对准布置包含可调整引导构件120和可调整定位辊组合件140。一般来说,可调整引导构件120将虾居中于托架构件100上,而可调整定位辊组合件140将虾2推动到托架构件100上,使得虾2安置于由夹持机构30限定的区域内。更具体来说,可调整引导构件120包含支撑构件122以及与支撑构件122可操作地联接的多个引导臂124。引导臂124彼此间隔开一定距离,以限定容纳虾2的间隙。此外,引导臂124位于夹持机构30上方并且大体上与托架构件100的中心突起109对准,使得在穿过可调整引导构件120时,虾2相对于托架构件100居中。
75.引导臂124可以由弹性和/或柔性材料构成并且可以在搁置配置中向内偏置。引导臂124还可以包含安置于其上的引导板126,虾2在操作期间接触所述引导板。可以视需要调整引导臂124,以选择性地增加或减小引导板126之间的间隙以容纳不同大小的虾2。
76.可调整定位辊组合件140包含辊臂142和辊体144。如先前所述,可调整定位辊组合件140(并且确切地说,辊体144)将推力施加在虾2上,以将虾2放置在托架构件100的虾支撑区域106上。可调整定位辊组合件140经由任何数目的齿轮、链条、传送带、臂等与驱动组合件24可操作地联接。此外,任何数目的附加辊体可以另外用于将推力施加在虾2上。
77.辊体144安置于托架构件100附近并且与辊臂142可调整地联接,以调整辊体144与托架构件100之间的距离或间隙。辊体144可以进行弹簧加载以将压力施加在虾2,且确切地说虾头上,以将虾头推动到虾支撑区域106的凹进区域110中。另外,辊臂142与托架可旋转地联接,使得其可以向前和向后移动以容纳不同大小的虾2。
78.一般来说,可调整肉分拣构件160相对于夹持机构30可移动,并且沿着路径前进以刺穿虾体并将虾体与虾头分离。如图20中所说明,可调整肉分拣构件160包含摆动分拣器臂162,所述摆动分拣器臂具有通过在除了虾头之外的位置处在方向“p”上移动(即,身体)区域来纵向穿透虾2的刺穿部分162a,并且进一步包含滑动部分162b,所述滑动部分可滑动地
接合虾2以在基本上垂直于虾2的背侧的方向“r”上将虾肉(即,身体)从虾壳和虾头去除。可以经由时序特征来调整可调整肉分拣构件160,所述时序特征允许用户改变摆动分拣器臂162触点虾2的时间。在2009年3月12日提交的第7,867,067号美国专利和2017年1月9日提交的第9,833,005号美国专利中描述一个此种分拣器组合件200的机构和操作的进一步论述,所述专利的全部内容明确地以引用的方式并入本文中。
79.在操作中,安置于装载托盘14中的虾2朝向夹持机构30中连同主齿轮24一起旋转的一个夹持机构移动。当夹持机构30旋转时,小夹持组合件61抓住虾2的尾部以将其从托盘14上去除。更具体来说,在夹持机构30的旋转期间,与第一和第二端板62联接的减震器58也与驱动凸轮26的接合区域28接合,由此引起第一端板62和第二端板72的下部部分62a、72a向内旋转,而第一端板62和第二端板72的上部部分62b、72b围绕第二夹持杆51向外旋转。此旋转使第一端板62和第二端板72的夹持部分66、76移动到打开位置。主夹具31和小夹持组合件61保持在此打开位置中,直到减震器从驱动凸轮26松开。
80.如图11中所说明,当夹持机构30继续旋转时,与端部小夹持组合件61联接的减震器58从驱动凸轮26松开。因此,与端部小夹持组合件61联接的扭力弹簧52推动第一端板62和第二端板72的夹持部分66、76,以围绕夹持杆51旋转到夹销59抓住虾2的尾部的关闭位置。
81.另外,当夹持机构30旋转并经过装载托盘14时,接合臂构件84、94可滑动地接触并且接合与框架组合件13联接的初级啮合凸轮170。这些初级接合凸轮170各自安置于使接合臂构件84、94的运动突出和/或中断的位置处,因此滑动接合使第一破开器臂82和第二破开器臂92向内移动(即,上部部分82b、92b围绕第一联接构件85、95向内旋转),因此允许第一臂82和第二臂92以及上部部分82b、92b穿过装载托盘14。第一接合臂构件84和第二接合臂构件94从凸轮170松开,且因此将第一臂82和第二臂92返回到其向外位置。
82.在小夹持组合件61保持虾2时,主夹具31安置于打开位置中。更具体来说,与第一侧板32和第二侧板42联接的减震器58和/或驱动臂56接合驱动凸轮26的接合区域28,所述接合区域向内突出到减震器58的路径中。因此,减震器58向内旋转,从而克服扭力弹簧52的弹性,由此使第一侧板32和第二侧板42的下部部分32a、42a也向内旋转,同时第一侧板32和第二侧板42的上部部分32b、42b围绕夹持杆52向外旋转。因此,将第一侧板32和第二侧板42的夹持部分36、46移动到打开位置。
83.接下来,虾2首先通过可调整引导构件120,然后通过可调整定位辊组合件140对准。更具体来说,通过小夹持组合件61保持的虾2的尾端在安置于引导臂124上的引导板126之间经过。因此,引导板126使虾2横向地移位,直到所述引导板居中于托架构件100上。
84.接下来,虾2在可调整定位辊组合件140的辊体144下方经过,这导致虾2的身体被向下推动到托架构件100上。更具体来说,通过辊体144将虾2的身体推向突起109,并且虾2的头部被推入虾支撑区域106的凹进区域110中。随着夹持机构30继续旋转,与主夹具31联接的减震器58从驱动凸轮26松开。因此,与主夹具31联接的扭力弹簧52推动第一侧板32和第二侧板42的夹持部分36、46,以围绕夹持杆50旋转到夹销59抓住虾2的身体的关闭位置。
85.主夹具31和小夹持组合件61的每个板被布置成将大致相同的力施加在虾上,以避免使虾2的一侧相对于另一侧损坏或变形。此外,主夹具31和小夹持组合件61中的每一个可以使用具有不同弹性值的弹性构件,以便以变化的力选择性地保持虾2的不同区域。例如,
与主夹具31相比,小夹持组合件61向虾2施加更多抓握力。
86.如先前所述,在通过夹持机构30保持虾2之后,在夹持机构30到达可调整肉分拣构件160之前,可能会发生任何额外处理,例如,破开尾部、切割、去肠线和/或清洗。例如,破尾器组合件81可以重新接合虾2,以破开尾壳并将尾壳与虾2体的壳分离。这些额外过程可能会在虾2处理期间的任何时间点发生。
87.当夹持机构30继续朝向可调整肉分拣构件160旋转时,摆动分拣器臂162压在虾头(其安置成“低于”在托架构件100的凹进区域110中的虾体)上,并且随着肉分拣构件160向前移动,所述肉分拣构件将通过在方向p上移动而绕过虾头并进入虾尾,其中尾部和头部会合。摆动分拣器臂162被设定尺寸,使得其滑动部分162b接合虾2的身体的全部或基本上全部纵向长度。当摆动分拣器臂162在方向r上沿着远离主夹具31的路径继续其运动时,虾2的身体将随着摆动分拣器臂162移动,同时夹销59将虾2的壳体和头部保持在主夹具31内。这种相对运动使虾2断头,从而将虾体(和肉)与虾头分开。
88.本文所描述的虾处理机器10可以使用任何数目的合适的替代方法来构造。例如,图21至24说明第二实例可调整引导构件220。应了解,图21到24中所示的可调整引导构件220可以包含与图1到20中所示的可调整引导构件120相似的特征,且因此,图21到24中所示的元件由图1到20中所示的实施例中指示的相似附图标记增加100指定。因此,将不会相当详细地描述这些特征。此外,应了解,关于可调整引导构件120描述的元件中的任何一个可以并入到可调整引导构件220中。
89.在此实例中,可调整引导构件220包含与框架组合件13可操作地联接的支柱222、与支柱222可操作地联接的安装轴224,以及与安装轴224可移动地联接的多个安装盘226。安装盘226用于将虾2居中于托架构件100上并且包含倾斜边缘。可调整引导构件220进一步包含安置于安装轴224上的安装桶228、采用螺旋弹簧234形式的弹性构件,以及采用锁紧垫圈236形式的保持构件。
90.安装桶228包含中心区230以及从中心区230延伸的两个锥形区域232。安装桶228一般是中空的以容纳安装轴224。更具体来说,中心区域230具有基本上恒定直径,然而锥形区域232具有在远侧方向上直径减小的主体。此外,中心区域230的边缘230a限定凸起或止挡件以限制安装盘226的移动。
91.如先前所述,安装桶228安置于安装轴224上。其上放置安装盘226,所述安装盘具有设定尺寸以接纳安装桶228的锥形区域232的孔。中心区域230的边缘230a防止安装盘226移动到安装桶的中心区域230上。接下来,螺旋弹簧234放置于安装轴224上并且通过锁紧垫圈236保持在压缩配置中。因此,朝向中心区域230向内推动安装盘226。
92.如同可调整引导构件120一样,可调整引导构件220被配置成通过将支柱222选择性地定位在框架组合件13上而与托架构件100的突起109中心对准。参考图24,当虾2穿过安装盘226之间的中心区域230时,虾2的身体可以将安装盘226向外推向螺旋弹簧234。然而,螺旋弹簧234将对虾2施加力,所述力使虾2定位并将虾2与托架构件100的突起109对准。由于安装盘226可以自由地旋转,因此当虾2穿过时对虾的阻力最小。此外,由于安装盘226安装在锥形区232上,因此它们可以自由地枢转而不会将中心孔约束在安装桶228上。在虾2穿过安装盘226后,螺旋弹簧234将安装盘226推回中心区域230,从而使中心区域返回到径向居中位置。
93.图25说明第三实例可调整引导构件320。应了解,图25中所示的可调整引导构件320可以包含与图1到24中所示的可调整引导构件120和220相似的特征,且因此,图25中所示的元件分别由图1到24中所示的实施例中指示的相似附图标记增加100和200指定。因此,将不会相当详细地描述这些特征。此外,应了解,关于可调整引导构件120和220描述的元件中的任何一个可以并入到可调整引导构件320中。
94.在此实例中,可调整引导构件320采用两个弹簧加载构件的形式,并且包含支柱322,其与框架组合件13可操作地联接;多个安装构件324,其具有上部部分324a和下部部分324b并且与支柱322可操作地联接;以及多个安装叉326,其与安装构件324联接。安装叉326用于将虾2居中于托架构件100上并且包含倾斜边缘。可调整引导构件320进一步包含枢轴销328,所述枢轴销将安装构件324中的每一个可旋转地联接到支柱322以及呈螺旋弹簧334形式的弹性构件。
95.螺旋弹簧334被配置成向外推动安装构件324的上部部分324a,使得安装构件324中的每一个围绕枢轴销328旋转。此旋转导致安装构件324的下部部分324b以及因此安装叉326向内推向彼此。如同可调整引导构件120和220一样,可调整引导构件320被配置成通过将支柱322选择性地定位在框架组合件13上而与托架构件100的突起109中心对准。
96.当虾2穿过安装叉326之间的中心区域时,虾2的身体可以向外推动安装叉326,从而导致安装构件324围绕枢轴销328旋转。因此,安装构件324中的每一个的上部部分324a向内移动,由此压缩螺旋弹簧334。螺旋弹簧334将力施加在安装构件324上以定位虾2并将虾与托架构件100的突起109对准。在虾2穿过安装叉326后,螺旋弹簧334向外推动安装构件324的上部部分324a,从而使安装叉326返回到居中位置。
97.现在转向图26到34,说明具有替代处理组合件416的替代实例机器410。应了解,图26到34中所示的机器10可以包含与图1到25中所示的机器10相似的特征,且因此,图26到34中所示的元件由图1到25中所示的实施例中指示的相似附图标记增加100的倍数指定。因此,将不会相当详细地描述这些特征。此外,应了解,关于机器10描述的元件中的任何一个可以并入到图26到34中所示的机器10中。
98.在此实例中,处理组合件416包含断头系统420。参考图30到34,断头系统420可以包含安装构件422、刀片组合件430和断头驱动组合件450。安装构件422可以采用板形式,所述板具有采用一个或多个孔形式的任何数目的安装区域424,例如螺栓或螺钉的安装构件(未示出)通过所述孔插入以将安装构件422与框架组合件13联接。如图26到29中所说明,断头系统420位于各个装载塔盘14的“下游”,使得虾2在到达断头系统420之前由夹持组合件30接纳。安装构件422以及因此断头系统420可以视需要容易地且简单地与虾处理机器10联接和/或从虾处理机器10移除,并且可以通过将安装区域424与框架组合件13对准来容易地改装到现有虾处理机器上。安装构件422可以由钢或任何其它合适的材料构成。
99.刀片组合件430包含细长轨道432、刀片436、刀片板440和辊子444。细长轨道432包含第一区段433和第二区段434,所述第一区段和第二区段彼此相距一定距离定位,使得它们之间形成间隙432a。第一区段433和第二区段434中的每一个经由任何数目的合适方法,例如螺钉或紧固件426与安装构件422可操作地联接。第一区段433和第二区段434中的每一个包含主体部分433a、434a以及从其延伸的凸缘部分433b、434b。如图32到34中所说明,主体部分433a、434a和凸缘部分433b、434b协作以限定刀片436可以穿过其前进的轨道。
100.刀片436采用细长构件的形式,所述细长构件具有第一下端436a和第二上端436b。刀片436的细长主体包含在细长主体的每一侧上延伸的通道437,所述通道接纳细长轨道432的第一凸缘部分433b和第二凸缘部分434b。此外,刀片436的后端436c安置于由主体部分433a、434a和凸缘部分433b、434b限定的轨道内。因此,刀片436可以通过横穿轨道而从升高位置前进到降低位置。
101.刀片436的第一端436a限定用于切割虾2的倾斜边缘438。此外,刀片尖端439可以从第一端436a和/或倾斜边缘438延伸。刀片尖端439可以用于最初地刺穿虾并且有助于将虾2保持在适当位置,以使倾斜边缘438通过将虾体与头部分离而将虾断头。
102.刀片组合件430的刀片板440采用细长主体的形式,所述细长主体通过接纳螺钉或螺栓426的安装槽440a与刀片436可操作地安装。刀片板440包含接纳辊子444的辊联接部分441。更具体来说,辊子444采用细长构件的形式,所述细长构件具有凸轮接合部分444a以及采用任何数目的孔形式的安装部分444b,任何数目的螺钉或螺栓可以通过所述孔安置以将辊子444与刀片板440固定。辊子444位于与安装构件422可操作地联接的辊子侧板448中。辊子侧板448包含至少一个侧槽448a和中心槽448b。更具体来说,至少一个侧槽448a允许螺钉或螺栓穿过辊子444到达刀片板440。此外,辊子444至少部分地安置于中心槽448b内并且可以在降低位置与升高位置之间在其中前进。如此配置,由于辊子444与刀片板440可操作地联接,进而与刀片436可操作地联接,因此辊子444的平移运动使刀片436也相对于辊子侧板448和安装构件422在上部位置与下部位置之间平移。辊子侧板448进一步包含接纳弹性构件445的弹性构件支架448c。弹性构件445在一端上与弹性构件支架448c可操作地联接并且螺钉或螺栓426在另一端与辊子444联接。因此,可以采用拉伸弹簧形式的弹性构件445可以将辊子444相对于安装构件422朝向降低位置偏置。
103.辊子444与断头驱动组合件450可移动地接合,所述断头驱动组合件包含齿轮452和凸轮构件456。更具体来说,齿轮452包含与主齿轮24接合的齿轮齿452,所述主齿轮引起齿轮452旋转。凸轮构件456通过任何数目的合适方法,例如紧固件或其它合适的机构与齿轮452可操作地联接。在一些实例中,齿轮452可以与凸轮构件456一体地形成。在任何情况下,齿轮452的旋转另外引起凸轮构件456旋转。凸轮构件456包含限定外部凸轮面458a的螺旋形主体458,所述外部凸轮面进一步包含下落或凸耳458b。
104.在操作中,当主齿轮24旋转时,安置于装载托盘14中的虾2朝向夹持机构30中连同主齿轮24一起旋转的一个夹持机构移动。夹持机构30随后保持虾2且继续沿着主齿轮24移动。此时,辊子444的凸轮接合部分444a可滑动地接合外部凸轮面458a。当齿轮452通过与主齿轮24的接合而旋转时,凸轮构件456类似地在顺时针方向上旋转(相对于图32中所示的视图)。外部凸轮面458a在向上方向上推动辊子444的凸轮接合部分444a,由此使辊子444相对于辊子侧板448(以及因此安装构件422)朝向升高位置移动。这还使刀片板440以及与其联接的刀片436相对于细长轨道432(以及因此安装构件422)朝向升高位置移动。因此,刀片436升高以允许虾夹持机构30所承载的虾2在刀片436下方穿过。当辊子444相对于辊子侧板448向上移动时,弹性构件445伸长。
105.随着凸轮构件456继续旋转,辊子444的凸轮接合部分444a到达下落458b。此时,弹性构件445通过中心槽448b接触并向下推动辊子444。此外,与辊子444联接的刀片板440开始向下移动。更进一步,与刀片板440联接的刀片436开始向下移动。第一端436a以及因此刀
片尖端439和倾斜边缘438穿透由虾夹持机构430保持的430并将所述虾断头。在一些实例中,刀片尖端439可以进入托架构件400的中心开口或凹槽440中,以确定刀片436的倾斜边缘438降低到足以充分地切割虾2的距离。凸轮构件456继续旋转,这引起刀片436从降低位置升高以准备切割另一只虾。
106.在一些实例中,可以通过在刀片板440的安装槽440a内移动刀片436来调整断头系统420的时序,所述刀片板另外可以用于容纳不同大小的虾2。在一些实例中,刀片436的倾斜边缘438可以被配置成当处于降低位置时相对于虾夹持机构30的面形成大致30
°
与大致40
°
之间,并且在一些实施例中大致36
°
的角度。合适角度的其它实例也是可能的。此外,在一些实例中,不同弹性构件445可以用于调整将刀片436推动到降低位置的速度,以便确保将虾完全地断头。
107.如先前所述,在通过夹持机构30保持虾2之后,可以发生任何额外处理,例如破开尾部、切割、去肠线和/或清洗。例如,破尾器组合件81可以重新接合虾2,以破开尾壳并将尾壳与虾2体的壳分离。这些额外过程可能会在虾2处理期间的任何时间点发生。
108.根据前述内容,独特的虾处理机器有效地可调整,以适应从虾体去除头部、切割、清洗和去除具有不同大小的虾的虾肉。机器的可调整性质可以通过需要最小工作量来以期望方式调整机器而减少处理时间。此外,断头系统可以通过将断头系统固定到机器的框架并将齿轮与主齿轮对准而有利地且容易地安装到现有虾处理机器。因此,可以将任何数目的现有虾处理机器升级成具有断头能力。
109.根据前述内容,独特的虾处理机器有效地可调整以适应切割、清洗和去除具有不同大小的虾的虾肉。机器的可调整性质可以通过需要最小工作量来以期望方式调整机器而减少处理时间。
110.本领域的技术人员将认识到,在不脱离本发明的范围的情况下,可关于上文所描述的实施例作出各种修改、改变和组合,且此类修改、改变和组合被视为在本发明概念的范围内。
111.在本专利申请的末尾的专利权利要求并不旨在根据35u.s.c.
§
112(f)进行解释,除非明确地叙述了传统的手段加功能(means
‑
plus
‑
function)语言,例如在权利要求中明确叙述的“用于
……
的构件”或“用于
……
的步骤”。本文中所描述的系统和方法涉及对计算机功能的改进,并改进传统计算机的功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1