适用于农产品晾晒的翻动机器人的制作方法
1.本发明涉及农产品处理技术领域,特别是适用于农产品晾晒的翻动机器人。
背景技术:
2.农产品例如花生进行加工时,由于新收获的花生荚果含水量一般为45%~65%,呼吸强度大,因此容易发热,极易受霉菌和细菌侵染,是荚果和果仁霉烂变质,种子劣变,活力下降,所以,必须应尽快晒干(或人工催干)荚果,防止发热、霉变,许多花生主产区都在收获后采取在田间自然晾晒方法,将植株集条铺晒,使荚果朝上或向阳,与土壤脱离,这种方法通风散热好,荚果不易霉变,经3天~5天晴天,当手摇荚果有响声时,即可摘果运回,当荚果含水20%~30%,是适宜黄曲霉产毒的条件,仍需尽快晒干,经1.5天~3天人工催于可使含水量降到10%左右,催干主要靠鼓风,只在空气湿度90%以上时才加温,气流温度不得高于35℃,温度过高,干得太快反而影响品质;而例如自然天气中的紫外线强,空气湿度较低的环境中,例如新疆地区,由于新疆处于大面积农作物耕种状态,工作人员缺乏,农作物的翻晒效果差,如果处于晾晒状态下的花生荚果不经常进行人工翻动,则花生荚果很容易出现晾晒过度现象,不利于作物的正常收获需求。
技术实现要素:
3.本发明要解决的技术问题是针对现有技术的不足,提供了一种结构设计合理、自动化程度高、最大程度上的减少人力物力且可对处于晾晒的农产品例如花生进行自动拨动防止花生晾晒过度的适用于农产品晾晒的翻动机器人。
4.本发明要解决的技术问题是通过以下技术方案来实现的,适用于农产品晾晒的翻动机器人,包括,承载座;固定安装在承载座两侧面上的承载臂;转动安装在承载臂和承载座上的若干传动主轴,传动主轴的端部外周面上固定安装有可对农产品进行拨动所设的若干弹尺;固定安装在承载座顶面上的动力机构,动力机构的动力输出轴与传动主轴传动连接;在承载座和承载臂的底面上安装有可提高或降低承载座距地面距离所设的升降位移轮。
5.本发明要解决的技术问题还可以通过以下技术方案来实现的,以上所述的适用于农产品晾晒的翻动机器人,所述的承载臂设置有两根,每根承载臂均包括,固定安装在承载座侧壁上的横向承载杆;固定安装在横向承载杆侧面上的纵向承载杆。
6.本发明要解决的技术问题还可以通过以下技术方案来实现的,以上所述的适用于
农产品晾晒的翻动机器人,所述的承载座和每根纵向承载杆的顶部均设有轴承座,轴承座内设有旋转轴承,位于两根纵向承载杆顶面上的旋转轴承的轴线重合,所述的传动主轴设有两根,其中一根传动主轴的中部外周面固定在承载座顶面上的轴承座的旋转轴承内周面上,另一根传动主轴的外周面固定在位于两根纵向承载杆上的轴承座的旋转轴承内周面上。
7.本发明要解决的技术问题还可以通过以下技术方案来实现的,以上所述的适用于农产品晾晒的翻动机器人,在两根传动主轴的外周面上均固定安装有两个皮带轮;所述的动力机构包括置于承载座顶面上的旋转电机和减速器,旋转电机的动力输出端与减速器的动力输入端传动连接,所述的减速器具有两根动力输出轴,两根动力输出轴位于减速器两侧的纵向承载杆上方,位于两根动力输出轴端部下方的纵向承载杆上均安装有内部具有旋转轴承的第二轴承座,所述的两根动力输出轴的端部外周面固定在第二轴承座的旋转轴承内圈上,在两根动力输出轴的中部外周面上均固定安装有两个第二皮带轮;所述的两根传动主轴上的皮带轮和两根动力输出轴上的第二皮带轮分别通过皮带传动连接。
8.本发明要解决的技术问题还可以通过以下技术方案来实现的,以上所述的适用于农产品晾晒的翻动机器人,所述的弹尺设有五组,其中三组弹尺安装在位于纵向承载杆上的传动主轴的外周面上,另外两组弹尺安装在承载座上的传动主轴的外周面上;所述的每组弹尺均由对称设置在传动主轴轴线两侧的拨动尺构成,每组拨动尺均具有十横排拨动尺,相邻两横排的拨动尺的安装间距相同,每横排拨动尺均由周向固定安装在传动主轴外周面上的二十四根拨动尺构成。
9.本发明要解决的技术问题还可以通过以下技术方案来实现的,以上所述的适用于农产品晾晒的翻动机器人,所述的升降位移轮包括,开设在承载座和纵向承载杆上的升降套安装孔;顶部外周面固定安装有直线轴承的升降套,所述的直线轴承的外周面固定在升降套安装孔内,升降套的底部开设有用于安装滚轮所设的安装槽,安装槽的内周面转动安装有轴体,位于安装槽内部的轴体的外周面上固定安装有滚轮,在安装槽的外壁上固定安装有用于驱动滚轮转动所设的步进电机,所述的步进电机的动力输出端与轴体的一端传动连接;在承载座的底面还固定安装有升降电机,位于升降电机动力输出端一侧的升降套的外周面上固定安装有可与升降电机的动力输出端啮合并使得升降套通过直线轴承沿升降套安装孔的内壁上下移动所设的齿条。
10.本发明要解决的技术问题还可以通过以下技术方案来实现的,以上所述的适用于农产品晾晒的翻动机器人,还包括安装在承载座顶面上的控制器,控制器通过通讯线分别与旋转电机、步进电机和升降电机连接。
11.与现有技术相比,本发明的有益技术效果是:通过动力机构驱动传动主轴转动,位于转动主轴上的弹尺可对处于晾晒状态的农作物例如花生颗粒进行拨动,防止花生颗粒长时间处于一个部位的晾晒而使得花生颗粒晾晒过度,从而替代了人工翻动花生颗粒的工作,工作效率与人力的对比,其晾晒效率提高,以此提高花生颗粒的品质并缩减人力经济投
入,实用性强。
附图说明
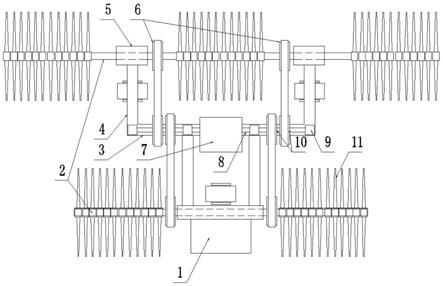
12.图1为本发明的俯视结构示意图;图2为本发明升降位移轮主视结构示意图;图3为本发明升降位移轮左视结构示意图;图4为本发明一组拨动尺的左视结构示意图。
13.图中,1、承载座;2、传动主轴;3、横向承载杆;4、纵向承载杆;5、轴承座;6、皮带轮;7、减速器;8、动力输出轴;9、第二轴承座;10、第二皮带轮;11、拨动尺;12、升降套;13、滚轮;14、步进电机;15、升降电机;16、齿条。
具体实施方式
14.以下参照附图,进一步描述本发明的具体技术方案,以便于本领域的技术人员进一步地理解本发明,而不构成对其权利的限制。
15.实施例1,参照图1—4,适用于农产品晾晒的翻动机器人,包括,承载座1,承载座1的横截面呈矩形状设置;固定安装在承载座1两侧面上的承载臂;转动安装在承载臂和承载座1上的若干传动主轴2,传动主轴2的端部外周面上固定安装有可对农产品进行拨动所设的若干弹尺;固定安装在承载座1顶面上的动力机构,动力机构的动力输出轴与传动主轴2传动连接;在承载座1和承载臂的底面上安装有可提高或降低承载座1距地面距离所设的升降位移轮。
16.实施例2,实施例1所述的适用于农产品晾晒的翻动机器人,所述的承载臂设置有两根,每根承载臂均包括,固定安装在承载座1侧壁上的横向承载杆3,横向承载杆3的横截面呈矩形状设置;固定安装在横向承载杆3侧面上的纵向承载杆4,纵向承载杆4的横截面呈矩形状设置。
17.实施例3,实施例2所述的适用于农产品晾晒的翻动机器人,所述的承载座1和每根纵向承载杆4的顶部均设有轴承座5,轴承座5内设有旋转轴承,位于两根纵向承载杆4顶面上的旋转轴承的轴线重合,所述的传动主轴2设有两根,其中一根传动主轴2的中部外周面固定在承载座1顶面上的轴承座5的旋转轴承内周面上,另一根传动主轴2的外周面固定在位于两根纵向承载杆4上的轴承座5的旋转轴承内周面上。
18.实施例4,实施例3所述的适用于农产品晾晒的翻动机器人,在两根传动主轴2的外周面上均固定安装有两个皮带轮6;所述的动力机构包括置于承载座1顶面上的旋转电机和减速器7,旋转电机和减速器7为现有技术根据使用需求可自行进行购置,旋转电机的动力输出端与减速器7的动力输入端传动连接,所述的减速器7具有两根动力输出轴8,两根动力输出轴8位于减速器7两侧的纵向承载杆4上方,位于两根动力输出轴8端部下方的纵向承载杆4上均安装有内部具有
旋转轴承的第二轴承座9,所述的两根动力输出轴8的端部外周面固定在第二轴承座9的旋转轴承内圈上,在两根动力输出轴8的中部外周面上均固定安装有两个第二皮带轮10;所述的两根传动主轴2上的皮带轮6和两根动力输出轴8上的第二皮带轮10分别通过皮带传动连接。
19.实施例5,实施例4所述的适用于农产品晾晒的翻动机器人,所述的弹尺设有五组,其中三组弹尺安装在位于纵向承载杆4上的传动主轴2的外周面上,另外两组弹尺安装在承载座1上的传动主轴2的外周面上;所述的每组弹尺均由对称设置在传动主轴2轴线两侧的拨动尺11构成,每组拨动尺11均具有十横排拨动尺11,相邻两横排的拨动尺11的安装间距相同,每横排拨动尺11均由周向固定安装在传动主轴2外周面上的二十四根拨动尺11构成,拨动尺11可采用具有韧性可发生轻微形变的塑料片,例如三角形塑料片,塑料片的边缘呈圆弧形状设置。
20.实施例6,实施例5所述的适用于农产品晾晒的翻动机器人,所述的升降位移轮包括,开设在承载座1和纵向承载杆4上的升降套安装孔,升降套安装孔的横截面呈圆形状设置;顶部外周面固定安装有直线轴承的升降套12,升降套12的横截面呈圆形状设置,所述的直线轴承的外周面固定在升降套安装孔内,升降套12的底部开设有用于安装滚轮所设的安装槽,安装槽的横截面呈圆环形状设置,安装槽实际上是在升降套12的底部开设有圆柱状凹槽即可,安装槽的内周面转动安装有轴体,该轴体的转动安装例如可在安装槽的内周面开设有两个轴承孔,轴体的两端通过轴承转动安装在两个轴承孔内即可,位于安装槽内部的轴体的外周面上固定安装有滚轮13,在安装槽的外壁上固定安装有用于驱动滚轮13转动所设的步进电机14,步进电机14的型号规格为现有技术根据使用需求可自行选择故此处不再赘述有关步进电机14型号的选择,所述的步进电机14的动力输出端与轴体的一端传动连接;在承载座1的底面还固定安装有升降电机15,步进电机14的型号规格根据使用需求可自行选择故此处不再赘述有关步进电机14的选型方法,位于升降电机15动力输出端一侧的升降套12的外周面上固定安装有可与升降电机15的动力输出端啮合并使得升降套12通过直线轴承沿升降套安装孔的内壁上下移动所设的齿条16。
21.实施例7,实施例6所述的适用于农产品晾晒的翻动机器人,还包括安装在承载座1顶面上的控制器,具体的控制器可具有plc控制器,控制器通过通讯线分别与旋转电机、步进电机14和升降电机15连接,具体的,承载座1上可安装有可对plc控制器、旋转电机、步进电机14和升降电机15供电所设的可充电电源,其电源型号根据使用需求可自行选择。
22.该农产品晾晒的翻动机器人使用时,将该翻动机器人放置在排布有农作物例如花生颗粒的晒场内,由于该翻动机器人只能前后移动,故根据晒场大小可以设置多个翻动机器人,当需要对化身颗粒进行翻动时,通过外部电源启动控制器,控制器使得旋转电机的动力输出端转动,旋转电机与减速器7协同工作并使得与减速器7的动力输出轴8传动连接的两根传动主轴2转动,位于两根传动主轴2外周面上的拨动尺11此时相对于地上的花生颗粒为转动状态,期间,步进电机14的动力输出端驱动滚轮13转动,使得该翻动机器人进行前后行走,行走其间,升降电机15的动力输出端转动并与齿条16啮合,使得升降套12进入至升降
套安装孔内,以此降低承载座1与地面之间的距离,并使得处于转动状态下的拨动尺11与地面上的花生颗粒接触并对花生颗粒进行拨动,防止花生颗粒的同一部位被阳光长时间暴晒,影响花生颗粒的正常质量。
23.需要注意的是,该翻动机器人进行花生颗粒的拨动时,可事先测量并获得晒场的宽度,从而自行通过控制器设置步进电机14的工作时间,使得步进电机14每次启动时仅能使得该翻动机器人行走一段距离,可事先测量承载座1与地面的距离,从而自行通过控制器设置升降电机15的工作时间,使得升降电机15每次启动时仅使得拨动尺11对花生颗粒进行拨动而不会与地面接触即可,翻动机器人行走其间,由于滚轮13不断的对沿途的花生颗粒碾压,所以滚轮13可采用椭圆形滚轮13,这样可让滚轮13与地面的接触面更小,从而碾压花生颗粒的数量尽可能的降低,并且即使翻动机器人的行走轨迹发生倾斜,也可对翻动机器人进行人工位置校准,需要注意的是,通过plc控制器控制旋转电机、步进电机14和升降电机15的工作为现有技术故此处不再赘述有关其具体控制方法和原理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1