聚合物壳式矫治器及其制造方法与流程
聚合物壳式矫治器及其制造方法
1.本申请是申请日为2016年7月7日,申请号为201680040411.0,发明名称为“利用邻间力耦合的矫正器的直接制造”的发明专利申请的分案申请。
2.交叉引用
3.本申请要求于2015年7月7日递交的美国临时申请第62/189,263号的权益,其内容通过援引方式整体纳入本文。
4.以下共同未决的专利申请的主题与本申请有关:2016年7月5日递交的题为“多材料矫正器(multi
‑
material aligners)”的美国申请第__/___,___号(代理人案号22773
‑
852.201),其要求于2015年7月7日递交的美国临时申请第62/189,259号以及于2015年7月7日递交的美国申请第62/189,282号的权益;递交于2016年7月5日的题为“利用邻间力耦合的矫正器的直接制造(direct fabrication of aligners with interproximal force coupling)”的美国申请第__/___,___号(代理人案号22773
‑
855.101),其要求于2015年7月7日递交的美国临时申请第62/189,263号的权益;2016年7月5日递交的题为“用于扩张牙弓的矫正器的直接制造(direct fabrication of aligners for arch expansion)”的美国申请第__/___,___号(代理人案号22773
‑
857.201),其要求于2015年7月7日递交的美国临时申请第62/189,271号以及于2015年7月7日递交的美国临时申请第62/189,301号的权益;2016年7月5日递交的题为“利用粘合剂的附接物模板的直接制造(direct fabrication of attachment templates with adhesive)”的美国申请第__/___,___号(代理人案号22773
‑
858.201),其要求于2015年7月7日递交的美国临时申请第62/189,259号以及于2015年7月7日递交的美国临时申请第62/189,282号的权益;2016年7月5日递交的题为“用于上颚扩张和其它应用的直接制造交联(direct fabrication cross
‑
linking for palate expansion and other applications)”的美国申请第__/___,___号(代理人案号22773
‑
859.201),其要求于2015年7月7日递交的美国临时申请第62/189,301号以及于2015年7月7日递交的美国临时申请第62/189,271号的权益;2016年7月5日递交的题为“具有一体形成特征的牙科矫正器的系统、设备和方法(systems,apparatuses and methods for dental appliances with integrally formed features)”的美国申请第__/___,___号(代理人案号为22773
‑
860.201),其要求于2015年7月7日递交的美国临时申请第62/189,291号、于2015年7月7日递交的美国临时申请第62/189,312号以及于2015年7月7日递交的美国临时申请第62/189,317号的权益;2016年7月5日递交的题为“动力臂的直接制造(direct fabrication of power arms)”的美国申请第__/___,___号(代理人案号22773
‑
861.201),其要求于2015年7月7日递交的美国临时申请第62/189,291号、2015年7月7日递交的美国临时申请第62/189,312号以及2015年7月7日递交的美国临时申请第62/189,317号的权益;2016年7月5日递交的题为“具有可变性能的口腔正畸矫正器的直接制造(direct fabrication of orthodontic appliances with variable properties)”的美国申请第__/___,___号(代理人案号为22773
‑
856.201),其要求于2015年7月7日递交的美国临时申请第62/189,291号、2015年7月7日递交的美国临时申请第62/189,312号以及2015年7月7日递交的美国临时申请第62/189,317号的权益;2016年7月5日递交的题为“利用一体形成
的容器从牙齿矫正器递送药物的系统、设备和方法(systems,apparatuses and methods for drug delivery from dental appliances with integrally formed reservoirs)”的美国申请第__/___,___号(代理人案号为algnp006b),其要求于2015年7月7日递交的美国临时申请第62/189,303号的权益;2016年7月5日递交的题为“使用热固性聚合物的牙科材料(dental materials using thermoset polymers)”的美国申请第__/___,___号(代理人案号571414:62
‑
15p us),其要求于2015年7月7日递交的美国临时申请第62/189,380号的权益;以及2016年7月5日递交的题为“具有装饰性设计的牙科矫正器(dental appliance having ornamental design)”的美国申请第__/___,___号(代理人案号algnp006a),其要求于2015年7月7日递交的美国临时申请第62/189,318号的权益,以上申请的全部公开内容通过援引的方式纳入本文。
背景技术:
5.现有的用于使牙齿移动(移位)的方法和装置在至少某些方面可能是不理想的。尽管透明壳式矫治器(transparent shell appliance)能够有效地使牙齿移动,但通过在牙齿上使用附接物可有助于复杂的牙齿移动,该附接物接合矫治器来使牙齿移动。尽管附接物可能是有效的,但牙齿上的这种附接物对于患者来说可能有些不便。借助具有较少附接物的透明壳式矫治器来移动牙齿将是有帮助的。
技术实现要素:
6.本文所公开的方法和装置借助邻间接合结构而提供了改善的牙齿的移动(movement,移位)。这种邻间接合结构能够至少部分地延伸到牙齿的邻间空间中以接合这些牙齿。邻间接合能够允许更大量的牙齿表面与矫治器接合,以便实现更精确的牙齿移动。此外,上述邻间接合使得能够在有利于促进牙齿移动的位置处接近牙齿。在很多实施例中,牙齿的邻间接合可与该牙齿的相对侧上的另一位置处的该牙齿的接合相对,以此提升牙齿的一个或多个扭矩或促进牙齿的旋转。牙齿可在第一侧上且靠近与第一侧相对的第二侧上的咬合面(occlusal surface,咀嚼面)之处被邻间地接合,以便引发扭矩或旋转。邻间接合能够提供比相对侧上的位置更靠近牙齿的旋转中心的接合,以此引发扭矩。在很多实施例中,矫治器的一对邻间结构被构造为用以在(牙齿的)颊侧牙邻面(bucal interproximal surface)和舌侧牙邻面(lingual interproximal surface)上接合牙齿,以便提供更好的接合和改善的牙齿移动力。这些邻间结构能够用于控制牙齿的旋转,以便改善牙齿的移动,而且还提供了更好的锚固(anchoring,固定)。上述邻间结构能够用于将矫治器锚固到后齿(如臼齿),以及用于促进前齿的移动从而通过锚固的臼齿的接合来封闭拔牙点(extraction site,抽出点)。替代地或者组合地,还能够使用邻间结构来治疗牙间隙(diastema)或者引发中线移位(midline shift)。
7.在很多实施例中,扫描患者的口内腔,以提供患者的口腔的三维轮廓数据。可使用患者的牙齿的三维轮廓数据来确定具有邻间结构的矫治器的三维形状轮廓。包括邻间结构的矫治器能够直接被制造。该矫治器可包括多个矫治器的其中之一,以根据治疗方案来移动牙齿,并且能够根据治疗方案来确定邻间结构的位置。
8.通过援引的纳入
9.本说明书中提及的所有出版物、专利和专利申请通过援引的方式纳入本文,其援引纳入的方式等同于每个单独的出版物、专利或专利申请专门地且单独地以援引的方式纳入本文。
附图说明
10.随附的权利要求书中特别地陈明了本发明的新颖特征。通过参照下文的详细说明(其阐述了多个说明性实施例)及附图将会更好地理解本公开的特征和优点,在这些实施例中运用了本发明的原理,并且在附图中:
11.图1a示出根据实施例的牙齿重新定位(tooth repositioning,牙齿再定位)矫治器;
12.图1b示出根据实施例的牙齿重新定位系统;
13.图1c示出根据实施例的使用多个矫治器的正畸治疗(orthodontic treatment,牙矫正术)的方法;
14.图2示出根据实施例的矫正装置(alignment apparatus)的多个部件及相应的力;
15.图3a示出根据实施例的设计正畸矫治器的方法;
16.图3b示出根据实施例的数字化地制定正畸治疗方案的方法;
17.图4是根据实施例的数据处理系统的简化方框图;
18.图5a示出根据实施例,所制造的壳体(fabricated shell)与牙齿503之间的接合机构;
19.图5b示出根据实施例,所制造的壳体511与一牙齿之间的另一接合机构;
20.图5c示出根据实施例,所制造的壳体可如何接合牙齿的咬边(undercut);
21.图5d和图5e示出根据实施例,可用于所制造的壳体的设计中的其它选择;
22.图6示出根据实施例,可被施加以便引发牙齿绕竖直轴线旋转的力;
23.图7a示出根据实施例、通过使用所制造的接合结构(例如,邻间接合结构)而可有效地施加于牙齿的力;
24.图7b示出根据实施例的多个典型位置,在这些位置中,邻间接合结构可被设计为接合牙齿;
25.图8a示出根据实施例的、直接制造的壳体的另一构型,该构型允许一颗或多颗牙齿平移移动;
26.图8b示出根据实施例,邻间接合结构能够如何被应用于协助将所制造的壳体锚固到一颗或多颗牙齿;
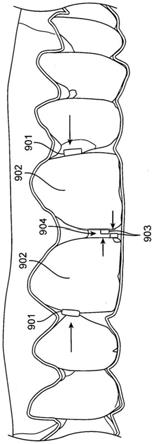
27.图9a示出根据实施例,多个牙齿接合结构能够如何被构造为治疗牙间隙;
28.图9b示出根据实施例,邻间牙齿接合结构能够如何用于引起中线移位;
29.图9c示出根据实施例,相对地设置在牙齿的颊侧和舌侧的一对邻间牙齿接合结构能够如何用于施加本文所述的多种结构的任一结构的牙齿移动力;
30.图9d示出根据实施例,矫正器(aligner,校正器)可如何由弹性材料和刚性材料两者制成,以使牙齿接合结构在牙齿上施加一个力;
31.图10a示出具有邻间接合结构的多个矫治器,这些矫治器中的邻间接合结构的邻间宽度是不同的;
32.图10b示出具有以不同角度设置的邻间接合结构的多个矫治器;
33.图11示出多个矫治器,这些矫治器的邻间接合结构具有不同的颊舌长度,被构造成利用矫治器的壁施加力到牙齿上;
34.图12a示出具有邻间接合结构的矫治器,该邻间接合结构联接到弹力壁,定位并成形为驱使牙齿移动;
35.图12b示出具有邻间接合结构的矫治器,该邻间接合结构包括弹力材料、定位并成形为驱使牙齿移动;
36.图13a示出一种矫治器,其中第一邻间接合结构穿过两个第一齿之间的第一邻间区域而第二邻间接合结构穿过两个第二齿之间的第二邻间区域;
37.图13b示出具有单个邻间接合结构的矫治器,该邻间接合结构定位成跨越牙齿之间的邻间空间;
38.图13c示出通过邻间接合结构施加多个力到牙齿上以提供合成的牙齿移动力的布置方式;以及
39.图14示出可用于具有邻间接合结构的矫治器中的一示例性结构,该结构具有一突出部,该突出部的曲率半径小于其厚度的三分之一。
具体实施方式
40.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的方法。该方法包括提供聚合物壳式矫治器,该聚合物壳式矫治器被成形为与多颗牙齿相适配。该聚合物壳式矫治器包括聚合物邻间接合结构,该聚合物邻间接合结构的尺寸被设定为横穿牙齿的邻间空间而从舌侧延伸到颊侧。该聚合物壳式矫治器还包括一个或多个牙齿接纳腔,以通过另外的一个或多个牙齿接纳腔将牙齿联接(耦合)到上述多颗牙齿中另外的一颗或多颗牙齿。当佩戴时,所述邻间接合结构从邻间空间向牙齿施加力而使牙齿从第一位置及取向移动到第二位置及取向。
41.在一些实施例中,每个邻间接合结构包括一宽度,该宽度在限定邻间空间的相邻牙齿之间延伸,其中该宽度在多个矫治器中依次增大,以便使相邻牙齿之间的距离依次增大。在一些实施例中,每个邻间接合结构均包括相对的接触表面以接合限定邻间空间的相邻牙齿,且其中这些接触表面相对于彼此的角度在所述多个矫治器中是变化(不同)的,以便将牙齿从第一位置及取向移动到第二位置及取向。
42.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的方法。依次地提供多个正畸矫治器,所述多个正畸矫治器被成形为与多颗牙齿相适配。所述多个正畸矫治器中的每一个均包括:邻间接合结构,所述邻间接合结构的尺寸被设定为横穿牙齿的邻间空间而从牙齿的颊侧延伸到牙齿的舌侧;以及一个或多个牙齿接纳结构,联接到所述邻间接合结构以便使牙齿联接到上述多颗牙齿的另外的一颗或多颗牙齿。所述邻间接合结构相对于一个或多个牙齿接纳结构的位置在所述多个正畸矫治器中是变化的,以便将牙齿从第一位置及取向移动到第二位置及取向。
43.在一些实施例中,对于所述多个矫治器的每一个而言,所述一个或多个牙齿接纳结构包括一个或多个牙齿接纳腔,且所述邻间接合结构位于与所述一个或多个牙齿接纳腔相距一定距离处。该距离在多个正畸矫治器中是变化的。
44.在一些实施例中,对于所述多个矫治器的每一个而言,通过在邻间接合结构与所述一个或多个牙齿接纳结构之间延伸的一个或多个延伸部,所述一个或多个牙齿接纳结构被联接到所述邻间接合结构,以便将邻间接合结构与不相邻的牙齿联接。
45.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的方法。该方法包括依次地提供被成形为与多颗牙齿相适配的多个(口腔)正畸矫治器,所述多个正畸矫治器的每一个。所述多个矫治器各自包括多个邻间接合结构,所述多个邻间接合结构的尺寸被设定为横穿牙齿的邻间空间而从牙齿的颊侧延伸到牙齿的舌侧,所述多个接合结构的每一个均包括邻间接合表面以接合牙齿。所述多个矫治器的每一个均在接合表面之间具有一分隔距离,且该分隔距离在所述多个矫治器中是依次变化的,以便当依次地佩戴所述多个矫治器时使牙齿从第一位置及取向移动到第二位置及取向。
46.在一些实施例中,该分隔距离在所述多个矫治器中依次增大。在一些实施例中,该分隔距离在所述多个矫治器中依次减小。
47.在一些实施例中,对于所述多个邻间接合结构的每一个而言,该分隔距离的尺寸被设定为能将一颗或多颗牙齿接纳在第一邻间接合结构与第二邻间接合结构之间。
48.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的方法。该方法包括依次地提供被成形为与多颗牙齿相适配的多个正畸矫治器。每个矫治器均包括多个邻间接合结构,所述多个邻间接合结构的尺寸被设定为横穿牙齿的邻间空间而从牙齿的颊侧延伸多个距离而到达牙齿的舌侧。所述多个距离在所述多个矫治器中依次减小,以便当依次地佩戴所述多个矫治器时将牙齿从第一位置及取向移动到第二位置及取向。
49.在一些实施例中,所述多个距离根据牙齿的移动而减小,该移动包括平移或旋转(运动)中的一个或多个。在某些情况下,所述多个距离可根据一颗或多颗牙齿的平移而减小;在某些情况下,所述多个距离根据一颗或多颗牙齿绕旋转中心的旋转而减小。
50.在一些实施例中,所述多个距离根据一颗或多颗牙齿绕穿过所述一颗或多颗牙齿的旋转中心和咬合面的旋转轴线的依次旋转而依次减小。
51.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的方法。提供了一种被成形为与多颗牙齿相适配的正畸壳式矫治器。此壳式矫治器包括:外壁,分别在所述多颗牙齿的颊面和舌面上延伸;以及多个邻间接合结构,所述多个邻间接合结构的尺寸被设定为横穿牙齿的邻间空间而从牙齿的颊侧延伸到牙齿的舌侧,并在所述外壁的颊侧和舌侧上联接到所述外壁。当佩戴矫治器时,所述多个邻间接合结构在被安置于所述多颗牙齿上时将所述壁的颊侧和舌侧朝向彼此驱策。
52.在一些实施例中,在被安置之前,所述多个邻间接合结构在自由竖立的构型下在所述壁的颊侧与舌侧之间延伸多个距离,而在被安置于所述多颗牙齿上时,所述多个邻间接合结构在装载构型下延伸多个相应的第二距离,所述多个第一距离小于所述多个相应的第二距离。在一些实施例中,所述壁被成形为能接纳一颗或多颗牙齿,且其中所述壁借助力接合所述一颗或多颗牙齿,以便响应于来自邻间接合结构的力而移动所述一颗或多颗牙齿。
53.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的方法。提供了一种被成形为与多颗牙齿相适配的正畸矫治器。该矫治器包括:外
壁,当佩戴矫治器时所述外壁在所述多颗牙齿的颊侧和舌侧上延伸;以及邻间接合结构,所述邻间接合结构的尺寸被设定为在佩戴矫治器时,所述邻间接合结构延伸到牙齿与相邻的牙齿之间的邻间空间中。当佩戴矫治器时,所述邻间接合结构从接合牙齿的接触表面延伸一距离至外壁的外表面,所述接触表面包括一曲率半径,其中该曲率半径小于该距离的三分之一。
54.在一些实施例中,上述曲率半径沿颊舌方向延伸,以对应于沿颊舌方向的牙齿的表面的曲率。在一些实施例中,上述邻间接合结构包括第二接触表面以接合另一颗牙齿,该邻间接合结构从第二接触表面延伸第二距离至外壁的外表面,第二接触表面包括第二曲率半径,并且该第二曲率半径小于该第二距离的三分之一。
55.在一些实施例中,上述外壁的外表面包括矫治器的颊面;在一些实施例中,上述外壁的外表面包括矫治器的舌面。
56.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的方法。该方法包括提供一种被成形为与多颗牙齿相适配的聚合物壳式矫治器。该矫治器包括:外壁,该外壁被成形为当佩戴所述矫治器时在所述多颗牙齿的外露的颊面、舌面和咬合面上延伸;以及多个邻间接合结构,所述邻间接合结构的尺寸被设定为,当佩戴所述矫治器时,所述邻间接合结构延伸到牙齿的邻间空间中,并且在所述外壁的颊侧和舌侧上联接到所述外壁。所述聚合物壳式矫治器被构造为在佩戴时接触所述多颗牙齿的周面的至少约60%。在一些实施例中,所述矫治器在佩戴时接触所述多个牙齿的周面的至少约80%。
57.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的方法,该方法包括依次地提供多个被成形为与多颗牙齿相适配的多个正畸矫治器。所述多个正畸矫治器的每一个均包括:壁,其成形为能接纳所述多颗牙齿;以及邻间接合结构,所述邻间接合结构从所述壁延伸。所述邻间接合结构的尺寸被设定为使其适配到相邻牙齿之间的邻间空间中,并且所述邻间接合结构包括:一长度,从所述壁延伸到邻间空间中;以及一宽度,当(所述正畸矫治器)佩戴在患者的口腔中时所述宽度在相邻牙齿之间的位置处沿近远中向(mesiodistal direction)在所述相邻牙齿之间延伸。在上述位置处邻间接合结构的长度或宽度中的一个或多个在所述多个正畸矫治器中是变化的,以便在依次地佩戴所述多个矫治器时将牙齿从第一位置及取向移动到第二位置及取向。
58.在一些实施例中,每个所述邻间接合结构均包括一接触表面,以接合限定所述邻间空间的一颗或多颗牙齿,且其中所述接触表面的角度在所述多个矫治器中是变化的,以使所述一颗或多颗牙齿从第一位置移动到第二位置。在一些实施例中,每个邻间接合结构均包括一接触表面,该接触表面具有一长度,该长度的尺寸被设定为使该接触表面能接合限定所述邻间空间的一颗或多颗牙齿,且其中该接触表面的长度在所述多个矫治器中是变化的,以使作用于所述一颗或多颗牙齿的力的大小变化。在一些实施例中,上述壁或邻间接合结构中的一个或多个响应于来自牙齿的力而弹性地变形或弯曲。
59.在多种实施例中,所述邻间接合结构在牙龈位置处横穿邻间空间而延伸到限定该邻间空间的牙齿与相邻的牙齿之间的一最小距离。
60.在多种实施例中,至少一个矫治器包括多种材料。
61.在多种实施例中,提供正畸矫治器包括将所述矫治器安置在患者的牙齿上。在多
种实施例中,患者将正畸矫治器安置在牙齿上。
62.在多种实施例中,所述牙齿包括多颗牙齿。
63.在多种实施例中,所述邻间接合结构包括一个或多个空隙(void)。
64.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的聚合物壳式矫治器。该聚合物壳式矫治器包括:聚合物邻间接合结构,该聚合物邻间接合结构的尺寸被设定为横穿牙齿的邻间空间而从舌侧延伸到颊侧;以及一个或多个牙齿接纳腔,用以通过另外的一个或多个牙齿接纳腔使牙齿联接到所述多颗牙齿中另外的一颗或多颗牙齿。该邻间接合结构被成形为,当佩戴矫治器时该邻间接合结构从邻间空间向牙齿施加力,将牙齿从第一位置及取向移动到第二位置及取向。
65.在一些实施例中,每个邻间接合结构包括一宽度,该宽度在限定所述邻间空间的相邻牙齿之间延伸,其中该宽度在所述多个矫治器中依次增大,以使所述相邻牙齿之间的距离依次增大。在一些实施例中,每个所述邻间接合结构均包括相对的接触表面,以接合限定所述邻间空间的相邻牙齿,且其中所述接触表面相对于彼此的角度在所述多个矫治器中是变化的,以便将牙齿从第一位置及取向移动到第二位置及取向。
66.在很多实施例中,提供了用于将患者的牙齿从第一位置及取向移动到第二位置及取向的多个正畸矫治器。每个矫治器包括:一邻间接合结构,所述邻间接合结构的尺寸设定为横穿牙齿的邻间空间而从牙齿的颊侧延伸到牙齿的舌侧;以及一个或多个牙齿接纳结构,所述牙齿接纳结构联接到所述邻间接合结构,以便将牙齿联接到患者的另外的一颗或多颗牙齿。所述邻间接合结构相对于所述一个或多个牙齿接纳结构的位置在所述多个正畸矫治器中是变化的,以便当依次佩戴所述多个矫治器时使牙齿从第一位置及取向移动到第二位置及取向。
67.在一些实施例中,对于所述多个矫治器的每一个而言,所述一个或多个牙齿接纳结构包括一个或多个牙齿接纳腔,且所述邻间接合结构位于与一个或多个牙齿接纳腔相距一距离处。该距离在所述多个正畸矫治器中是变化的。
68.在一些实施例中,对于所述多个矫治器的每一个而言,通过在所述邻间接合结构与所述一个或多个牙齿接纳结构之间延伸的一个或多个延伸部,使所述一个或多个牙齿接纳结构被联接到所述邻间接合结构,以便将所述邻间接合结构与不相邻的牙齿联接。
69.在很多实施例中,提供了用于将患者的牙齿从第一位置及取向移动到第二位置及取向的多个正畸矫治器。每个矫治器均包括多个邻间接合结构,所述邻间接合结构的尺寸被设定为横穿牙齿的邻间空间而从牙齿的颊侧延伸到牙齿的舌侧,所述多个接合结构的每一个均包括邻间接合表面以接合牙齿。所述多个矫治器的每一个均在所述接合表面之间具有分隔距离,并且该分隔距离在所述多个矫治器中依次变化,以便当依次地佩戴所述多个矫治器时使牙齿从第一位置及取向移动到第二位置及取向。
70.在一些实施例中,所述分隔距离在所述多个矫治器中依次增大;在一些实施例中,该分隔距离在所述多个矫治器中依次减小。
71.在一些实施例中,对于所述多个邻间接合结构的每一个而言,所述分隔距离的尺寸被设定为在第一邻间接合结构与第二邻间接合结构之间接纳一颗或多颗牙齿。
72.在很多实施例中,提供了用于将患者的牙齿从第一位置及取向移动到第二位置及取向的多个矫治器。每个矫治器均包括多个邻间接合结构,所述多个邻间接合结构的尺寸
被设定为横穿牙齿的邻间空间而从牙齿的颊侧延伸多个距离到牙齿的舌侧。所述多个距离在所述多个矫治器中依次减小,以便当依次地佩戴所述多个矫治器时将牙齿从第一位置及取向移动到第二位置及取向。
73.在一些实施例中,上述矫治器被构造成当依次佩戴时产生牙齿的移动,该移动包括平移或旋转中的一个或多个,且其中所述多个距离根据一个或多个牙齿的移动而减小。在某些情况下,所述矫治器被构造成当依次佩戴时产生牙齿的平移,且其中所述多个距离根据一颗或多颗牙齿的平移而减小。在某些情况下,矫治器被构造成在依次佩戴时产生牙齿的旋转,且其中所述多个距离根据一颗或多颗牙齿绕旋转中心的依次的旋转而减小。
74.在一些实施例中,矫治器被构造成当依次佩戴时产生牙齿的旋转,其中所述多个距离根据一颗或多颗牙齿绕穿过一颗或多颗牙齿的旋转中心和咬合面的旋转轴线的依次旋转而减小。
75.在很多实施例中,提供了一种用于将患者的多颗牙齿从第一位置及取向移动到第二位置及取向的正畸壳式矫治器。该矫治器包括:多个牙齿接纳腔;外壁,联接到所述牙齿接纳腔并且分别在所述多颗牙齿的颊面和舌面上延伸;以及多个邻间接合结构,所述多个邻间接合结构的尺寸设定为横穿相应的邻间空间而从牙齿的颊侧延伸到牙齿的舌侧延伸,并且在壁的颊侧和舌侧上联接到外壁。所述多个邻间接合结构被构造成当被安置于所述多颗牙齿上时将所述壁的颊侧和舌侧朝向彼此驱策。
76.在一些实施例中,在安置之前,所述多个邻间接合结构在自由竖立构型下在壁的颊侧与舌侧之间延伸多个距离,而当被安置于所述多颗牙齿上时,所述多个邻间接合结构在装载构型下延伸多个相应的第二距离,所述多个第一距离小于所述多个相应的第二距离。
77.在一些实施例中,上述壁被成形为能接纳一颗或多颗牙齿,并借助力而接合一颗或多颗牙齿,以便响应于来自邻间接合结构的力而移动一颗或多颗牙齿。
78.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的正畸矫治器。该矫治器包括:多个牙齿接纳腔;外壁,联接到所述牙齿接纳腔并且在牙齿的颊侧和舌侧上延伸;以及邻间接合结构,所述邻间接合结构的尺寸被设定为延伸到该牙齿与相邻的牙齿之间的邻间空间中。当佩戴矫治器时,邻间接合结构从接合牙齿的接触表面延伸一距离至外壁的外表面,该接触表面包括一曲率半径,其中该曲率半径小于该距离的三分之一。
79.在一些实施例中,上述曲率半径沿颊舌方向延伸,以对应于沿颊舌方向的牙齿表面的曲率。
80.在一些实施例中,邻间接合结构包括接合另一颗牙齿的第二接触表面,其中邻间接合结构从第二接触表面延伸第二距离至外壁的外表面,第二接触表面包括第二曲率半径,其中第二曲率半径小于第二距离的三分之一。
81.在一些实施例中,外壁的外表面包括矫治器的颊面;在一些实施例中,外壁的外表面包括矫治器的舌面。
82.在很多实施例中,提供了一种用于将患者的牙齿从第一位置及取向移动到第二位置及取向的聚合物壳式矫治器。该矫治器包括:多个牙齿接纳腔;外壁,所述外壁联接到牙齿接纳腔并且在所述多颗牙齿的外露的颊面、舌面和咬合面上延伸;以及多个邻间接合结
构,所述多个邻间接合结构的尺寸被设定为延伸到牙齿的邻间空间中并且在壁的颊侧和舌侧上联接到外壁。聚合物壳式矫治器接触所述多个牙齿的周面的至少约60%。在一些实施例中,聚合物壳式矫治器接触所述多颗牙齿的周面的至少约80%。
83.在很多实施例中,提供了用于将患者的牙齿从第一位置及取向移动到第二位置及取向的多个正畸矫治器。每个矫治器均包括:壁,所述壁成形为能接纳所述多颗牙齿;以及邻间接合结构,从所述壁延伸,且所述邻间接合结构的尺寸被设定为适配到相邻牙齿之间的邻间空间中。所述邻间接合结构包括:一长度,从所述壁延伸到邻间空间中;以及一宽度,在相邻牙齿之间的位置处沿近远中向在相邻牙齿之间延伸。所述位置处的邻间接合结构的长度或宽度中的一个或多个在所述多个正畸矫治器中是变化的,以便在依次地佩戴所述多个矫治器时将牙齿从第一位置及取向移动到第二位置及取向。
84.在一些实施例中,每个邻间接合结构均包括接触表面,以接合限定邻间空间的一颗或多颗牙齿,且其中接触表面的角度在所述多个矫治器中是变化的,以使所述一颗或多颗牙齿从第一位置移动到第二位置。
85.在一些实施例中,每个邻间接合结构均包括接触表面,该接触表面具有一长度,该长度的尺寸被设定为(使该接触表面)接合限定邻间空间的一颗或多颗牙齿,且其中该接触表面的长度在所述多个矫治器中是变化的,以使作用于所述一颗或多颗牙齿的力的大小变化。
86.在一些实施例中,上述壁或邻间接合结构中的一个或多个包括如下材料:该材料响应于来自牙齿的力而弹性地变形或弯曲。
87.在多种实施例中,上述邻间接合结构在牙龈位置处横穿邻间空间延伸限定邻间空间的牙齿与相邻的牙齿之间的最小距离。
88.在多种实施例中,至少一个矫治器包括多种材料。在多种实施例中,矫治器被构造成使患者能够手动地将其移除。在多种实施例中,上述牙齿包括多颗牙齿。在多种实施例中,邻间接合结构包括一个或多个空隙。
89.在很多实施例中,提供了一种将一颗或多颗牙齿从第一位置及取向移动到第二位置及取向的矫治器,所述矫治器包括:多个邻间接合结构,所述邻间接合结构在邻间空间的颊侧及邻间空间的舌侧处接合第一牙齿的邻间空间,以便沿第一方向驱策牙齿;以及一相对的接合结构,所述相对的接合结构沿与第一方向相反的第二方向驱策牙齿,从而对牙齿施加扭矩,位于所述矫治器上的所述多个邻间接合结构接合更靠近牙龈而非相对的接合结构的邻间空间。
90.在很多实施例中,提供了一种将一颗或多颗牙齿从第一位置及取向移动到第二位置及取向的矫治器,该矫治器包括:一邻间接合结构,其接合第一牙齿的邻间空间以便沿第一方向驱策牙齿;以及相对的接合结构,其沿与第一方向相反的第二方向驱策牙齿而对所述牙齿施加扭矩,位于所述矫治器上的所述多个邻间接合结构接合更靠近牙龈而非相对的接合结构的邻间空间。
91.在多种实施例中,矫治器还包括处于第二牙齿的相对侧上的多个邻间结构,以在移动第一牙齿的同时将所述矫治器锚固到第二牙齿。
92.在一些实施例中,第二牙齿包括多颗锚固齿(anchor tooth),且所述多个邻间接合结构包括接合所述多个锚固齿的多对邻间接合结构。在一些实施例中,所述邻间接合结
构包括多个邻间接合结构,所述多个邻间接合结构包括位于牙齿的颊侧上的第一邻间接合结构以及位于舌侧上的第二邻间接合结构。在一些实施例中,第一牙齿包括待移动的多个第一牙齿,而所述多个邻间接合结构包括接合所述待移动的多个第一牙齿的多对邻间接合结构。在一些实施例中,第一牙齿包括待移动的多个第一牙齿,而邻间接合结构包括接合所述待移动的多个第一牙齿的多个邻间接合结构。
93.在多种实施例中,矫治器包括多个牙齿接纳腔,所述多个牙齿接纳腔被成形为接纳牙齿并且使一颗或多颗牙齿从第一位置及取向移动到第二位置及取向。
94.在多种实施例中,移动所述一颗或多颗牙齿包括所述一颗或多颗牙齿的平移。在多种实施例中,移动所述一颗或多颗牙齿包括所述一颗或多颗牙齿的旋转。在一些实施例中,所述旋转包括绕竖直轴线的旋转;在一些实施例中,所述旋转包括绕颊舌轴线的旋转。
95.在多种实施例中,所述多个邻间接合结构合并为单个接合结构,所述单个接合结构经过邻间间隙而从颊侧延伸到舌侧,以在颊侧和舌侧上接合牙齿。
96.在多种实施例中,提供一种借助矫治器移动多颗牙齿的方法,其包括提供如本文所公开的矫治器。
97.在很多实施例中,提供了一种制造用于移动患者的一颗或多颗牙齿的正畸矫治器的方法。确定一移动路径,以将一颗或多颗牙齿从初始排列(initial arrangement)移动到目标排列。确定用以产生一颗或多颗牙齿沿移动路径的移动的力系统。为正畸矫治器(其被构造成产生所述力系统)确定一矫治器几何结构。基于所确定的矫治器几何结构直接制造正畸矫治器。
98.在一些实施例中,所述矫治器几何结构包括构造成接合第一牙齿的邻间空间的至少一个邻间接合结构。
99.在一些实施例中,该方法还包括制造多个正畸矫治器,所述多个正畸矫治器的每一个均被构造成产生沿所述移动路径的移动。
100.在多种实施例中,本文所公开的矫治器已被直接制造。
101.在一些方案中,所述直接制造包括增材制造(additive manufacturing,增量制造)。在一些方案中,所述直接制造包括减材制造。
102.如本文所使用的,术语“坚硬(stiff)”和“刚性(rigid)”被互换使用。
103.如本文所使用的,术语“扭矩(torque)”和“力矩(moment)”被认为是同义的。
104.如本文所使用的,术语“和/或”被用作表明两个词语或表达被一起采用或单独采用的功能词。例如a和/或b包含单独a、单独b以及a与b一起。
105.如本文所使用的,“多颗牙齿”包含两颗或更多牙齿。
106.如本文所使用的,“力矩”包含作用于物体(如牙齿)上相距阻力中心一定距离处的力。例如,该力矩可通过施加于与阻力中心的位移矢量对应的矢量力的矢量叉积计算而得。该力矩可包括指向某一方向的矢量。与另一力矩相反的力矩可包含例如取向为朝向物体(如牙齿)的第一侧的其中一个力矩矢量以及取向为朝向物体(如牙齿)的相反侧的另一力矩矢量。
107.如本文所使用的,“差动力矩(differential moment)”包含相互耦合的两个或更多个力矩,以向一颗或多颗牙齿提供相反的力矩。该差动力矩可包括施加到牙齿上的第一力矩和相反的第二力矩。替代地或者组合地,所述差动力矩可包括牙弓(arch)的一颗或多
颗第一牙齿的第一力矩,其耦合于牙弓的一颗或多颗第二牙齿的相反的第二力矩。牙弓的一颗或多颗第一牙齿可包括牙弓的第一段,而牙弓的一颗或多颗第二牙齿可包括牙弓的第二段,其中牙弓的第一段的第一力矩耦合于牙弓的第二段的相反的第二力矩。所述一颗或多颗第一牙齿可包括牙弓的第一段的多个相邻的第一牙齿,而所述一颗或多颗第二牙齿可包括牙弓的第二段的多个相邻的第二牙齿,其中牙弓的多个相邻的第一牙齿的第一力矩与牙弓的多个相邻的第二牙齿的相反的第二力矩相对(相反)。
108.如本文所使用的,包括力矩的牙齿是指这样的牙齿:该牙齿具有绕阻力中心作用于该牙齿上的力。该力可通过直接联接、或者借助牙齿上的附接物及两者的组合而联接到牙齿的矫治器来产生。
109.本文所述的反力矩(counter moment,反向力矩)可被用于精确地控制一颗或多颗牙齿的移动,并且可被用于提供一颗或多颗牙齿的锚固。在很多实施例中,多颗后齿包括反力矩以改善后齿的锚固,且一颗或多颗后齿包括较少的反向移动并被朝向所述多颗锚固后齿移动。或者,所述多颗后齿的一颗或多颗的反力矩可被构造为允许所述一颗或多颗后齿朝向前齿移动。
110.多组一颗或多颗牙齿的力矩可相互耦合,以便控制牙齿的移动,并且一组或多组牙齿的力矩可通过很多种方式相互耦合。所述多组一颗或多颗牙齿的力矩可通过抵消力矩(offset moment,补偿力矩)和/或平衡力矩而相互耦合,以便为所述多组一颗或多颗牙齿之中的一组或多组提供优先移动。例如,后齿可设有比前齿更大的反力矩,以使前齿向后齿移动。
111.本文所公开的力矩和反力矩非常适合于移动多种类型的牙齿和多种状态的牙齿,并且非常适合于多种状态的牙齿的使用。例如,本文公开的实施例可被用于治疗咬合面的一个或多个斜面(cant,倾斜)、使口腔的一侧上的牙齿升高并使口腔的相反侧上的牙齿降低、使牙齿一同沿牙弓扩张、拔牙点的封闭、挤入(intrusion,侵入)、挤出、旋转、倾斜以及以上情况的组合。
112.在很多实施例中,一颗或多颗后齿包括臼齿、前臼齿或犬齿中的一颗或多颗,而一颗或多颗前齿包括中门齿、侧门齿、尖牙、第一双尖牙或第二双尖牙中的一颗或多颗。
113.本文公开的实施例可被用于使多组一颗或多颗牙齿相互联接。所述多组一颗或多颗牙齿可包括第一组一颗或多颗前齿和第二组一颗或多颗后齿。第一组牙齿可通过本文所公开的聚合物壳式矫治器联接到第二组牙齿。
114.第一组牙齿可通过多种方式联接到第二组牙齿,以及在很多实施例中,第一组一颗或多颗牙齿包括第一力矩和第一反力矩,而第二组一颗或多颗牙齿包括第二力矩和第二反力矩。第一力矩和第一反力矩可包括第一组一颗或多颗牙齿的组合第一力矩和组合第一反力矩,而第二力矩和第二反力矩可包括第二组牙齿的组合第二力矩和组合第二反力矩。组合第一力矩、组合第一反力矩、组合第二力矩和组合第二反力矩能够通过聚合物壳式矫治器而相互耦合,以便移动第一组一颗或多颗牙齿或第二组一颗或多颗牙齿、以及这两者的组合。
115.在很多实施例中,第一组一颗或多颗牙齿的每颗牙齿均包括第一力矩和反力矩,而第二组一颗或多颗牙齿的每颗牙齿均包括第二力矩和第二反力矩。第一力矩可通过在第一牙齿的第一区域或位置处施加于一颗或多颗第一牙齿的第一力来产生,而反力矩可通过
在反向位置处施加于这一颗第一牙齿的反力来产生。第二力矩可通过在第二牙齿的区域处施加于一颗或多颗第二牙齿的第二力来产生,而反力矩通过在反向位置处施加于这一颗第二牙齿的反力来产生。
116.各颗牙齿的阻力中心例如可位于牙齿根部的分叉部或三根分叉部附近。对于单根齿而言,阻力中心可位于从牙槽嵴到齿根顶点的距离的约25%与约70%之间的某处,例如该距离的约40%处。
117.包括多颗牙齿的一段牙齿的一个(牙齿)组的阻力中心可通过多种方式中的一种或多种来确定。例如,阻力中心可通过有限元建模、科学文献中的公布值、借助实验负载进行的台架测试、数学公式和近似值、以及以上各种组合来确定。例如,可根据支撑牙齿结构,如牙周韧带、软组织和骨支撑结构来确定阻力中心。虽然一组牙齿的阻力中心可随着移动方向而改变,但本领域普通技术人员可根据本文公开的实施例来确定阻力中心。
118.本文公开的实施例非常适用于移动第一组一颗或多颗牙齿中的一颗或多颗、或者移动第二组一颗或多颗牙齿中的一颗或多颗,以及两者的组合。
119.本文公开的实施例非常适合于与一个或多个已知在市面上可买到的牙齿移动部件(如附接物和聚合物壳式矫治器)相结合。在很多实施例中,矫治器及一个或多个附接物(attachment)被构造为沿着包括六个自由度的牙齿移动矢量移动一颗或多颗牙齿,在所述六个自由度中,三个自由度是旋转自由度,三个自由度是平移自由度。本文公开的实施例可提供基于对多颗牙齿的每颗的力矩和反力矩的差动力矩矢量。该差动力矩矢量能提供更为精确的牙齿移动,并且可使得用于移动一颗或多颗牙齿的力减小。
120.本公开提供了正畸系统及其相关方法,其旨在设计并提供改善的或更有效的牙齿移动系统以引起期望的牙齿移动和/或使牙齿重新定位成期望的排列。
121.虽然参照了包括聚合物壳式矫治器的矫治器,但本文公开的实施例非常适用于使用多种接纳牙齿的矫治器,例如不具有一个或多个聚合物或壳体的矫治器。该矫治器可由许多种材料中的一种或多种材料制成,例如金属、玻璃、增强纤维、碳纤维、复合材料、增强复合材料、铝、生物材料及其组合等。该矫治器可通过多种方式成形,例如通过热成型或本文公开的直接制造等。替代地或组合地,矫治器可通过机械加工制成,如由一块材料通过计算机数控加工制成的矫治器。
122.本公开的正畸系统可包括牙齿附接物以及当患者佩戴时接合这些附接物的一个或多个正畸矫治器。参照图1a来概括地描述这样的矫治器:该矫治器具有牙齿接纳腔,该牙齿接纳腔通过例如应用由于矫治器弹性而产生的力来接纳并重新定位牙齿。图1a示出一示例性牙齿重新定位矫治器或矫正器100,其能够被患者佩戴以便实现每颗牙齿102在颌(jaw)中逐步重新定位。该矫治器可包括壳体(例如,连续的聚合物壳体或分段的壳体),该壳体具有牙齿接纳腔用以接纳牙齿并将牙齿弹性地重新定位。矫治器或者其一个或多个部分可使用牙齿的物理模型来进行间接制造。例如,矫治器(例如聚合物矫治器)可使用牙齿的物理模型和一片适当层数的聚合物材料来形成。在一些实施例中,物理(实体)矫治器是例如使用快速原型制作技术而从矫治器的数字模型直接制造的。矫治器能够适配在上颌或下颌中的所有牙齿(或者并非所有的牙齿)上。矫治器可专门地被设计为适于容纳(适应)患者的牙齿(例如,牙齿接纳腔的分布型(topography)匹配患者牙齿的分布型),并且可基于印痕(impression)、扫描等方式产生的患者牙齿的凹凸模型来制造。或者,该矫治器可以是
一通用型矫治器,其被构造为接纳牙齿、但不必成形为与患者牙齿的分布型匹配。在某些情况下,仅是某些被矫治器接纳的牙齿会通过矫治器重新定位,而其它牙齿可提供一基部或锚固区域,用以在矫治器向待重新定位的某颗或多颗牙齿施加力时使矫治器保持就位。在某些情况下,某些或大部分、甚至所有牙齿将在治疗期间被重新定位在某些点处。被移动的牙齿同样可作为在患者佩戴矫治器时保持矫治器的基部或锚固部。一般情况下,将不会提供金属丝或其它装置来使矫治器在牙齿上保持就位。但是,在某些情况下,在牙齿102上提供单独的附接物或其它锚固元件104(与矫治器100中的相应的容座或孔106适配)也是可取的或必要的,使得矫治器能够在牙齿上施加选定的力。爱利科技公司(爱齐公司,align technology,inc)名下的众多专利和专利申请、包括例如美国专利第6,450,807号和第5,975,893号以及可通过万维网访问的公司网页(参见例如网址“invisalign.com”)中描述了多种典型矫治器,包括在系统中运用的那些矫治器。爱利科技公司名下的专利和专利申请、例如美国专利第6,309,215号和第6,830,450号中还描述了适合与正畸矫治器一起使用的安装在牙齿上的附接物的示例。
123.图1b示出牙齿重新定位系统110,其包括多个矫治器110a、110b、110c。本文所述的任一矫治器均能够被设计和/或提供为在牙齿重新定位系统中使用的一套多个矫治器的一部分。每个矫治器均可被构造为使牙齿接纳腔具有与用于矫治器的中间的或最终的牙齿排列对应的几何结构。可通过将一系列增量位置调节矫治器安置在患者的牙齿上而逐步地将患者的牙齿从初始牙齿排列重新定位到目标牙齿排列。例如,牙齿重新定位系统110可包括对应于初始牙齿排列的第一矫治器110a、对应于一个或多个中间排列的一个或多个中间矫治器110b、以及对应于目标排列的最终矫治器110c。目标牙齿排列可以是所有根据方案的正畸治疗结束时,为患者的牙齿选择的根据方案的最终牙齿排列。或者,目标排列可以是正畸治疗过程期间用于患者牙齿的某些中间排列的其中之一,这些中间排列可包括多种不同治疗方案,包括(但不局限于)如下多种情况:被推荐进行外壳手术、邻面去釉(ipr)是合适的、被安排进度检查、锚固布置是最好的、腭扩张是理想的、涉及到修复牙医学(例如,嵌体、高嵌体、牙冠、桥(bridge)、种植牙(implant)、贴片(veneer,表面镶嵌)之类)等等。同样,应理解的是,目标牙齿排列可以是用于患者牙齿的任何根据方案所得的排列,其沿循一个或多个增量重新定位阶段。同样地,初始牙齿排列可以是用于患者牙齿的任何初始排列,随后是一个或多个增量重新定位阶段。
124.图1c示出根据实施例的使用多个矫治器的正畸治疗的方法150。方法150可使用本文所述的任一矫治器或矫治器组来实施。在步骤160中,第一正畸矫治器被应用于患者的牙齿,以便将牙齿从第一牙齿排列重新定位到第二牙齿排列。在步骤170中,第二正畸矫治器被应用于患者的牙齿,从而将牙齿第二牙齿排列重新定位到第三牙齿排列。必要时,可重复方法150(使用任何合适的数字和连续的多个矫治器的组合),以便将患者的牙齿从初始排列以递增方式重新定位到目标排列。这些矫治器可全部在同一阶段产生,或者成套或成批产生(例如,在治疗阶段开始时),或者可以每次被制造出一个矫治器,并且患者可以佩戴每一个矫治器直到可能不再感受到每一个矫治器在牙齿上的压力为止,或直到已实现了对于给定阶段所指定的牙齿移动的最大量。在患者佩戴上述多个矫治器中的任一矫治器之前,可以设计甚至制造多个不同的(例如,一套)矫治器。在佩戴用于一合适时期的矫治器之后,患者可使用该系列中的下一矫治器替换当前的矫治器,直到不再有后续的矫治器为止。这
些矫治器通常不固定附着到牙齿上,且患者可在疗程期间的任一时间安置和重新安置矫治器(例如,可被患者摘除的矫治器)。该系列中的若干矫治器或最终矫治器可具有为过度矫正牙齿排列而选定的一个或多个几何结构。例如,一个或多个矫治器可具有会使(如果完全地实现)各颗牙齿移动超出已被选定为“最终”方案的牙齿排列的几何结构。这样的过度矫正(矫枉过正)可适合于弥补在已终止重新定位过程之后可能的复发(例如,允许各颗牙齿朝向其预矫正位置回移)。过度矫正还可有益于加速矫正的速率(例如,具有定位成超出期望中间位置或最终位置的几何结构的矫治器能以更大的速率使各颗牙齿朝向该位置移位)。在这样的情况下,可在牙齿达到矫治器所限定的位置之前终止矫治器的使用。而且,可以有意地进行过度矫正,以此弥补矫治器的任何误差或局限性。
125.本文所述的正畸矫治器的多种实施例能够通过多种不同的方式来制成。在一些实施例中,本文中的正畸矫治器(或其某些部分)可使用直接制造,诸如增材制造技术(在本文中也称为“3d打印”)或减材制造技术(例如铣削)等来生产。在一些实施例中,直接制造包括在不使用物理模板(例如,模具、掩膜等)限定物体几何结构的情况下形成一物体(例如,正畸矫治器或其某些部分)。增材制造技术可被分类如下:(1)槽光固化(例如,立体光刻),其中从液态光聚合物树脂的槽逐层构建物体;(2)材料喷射,其中使用连续的或按需喷印(dod)方法将材料喷射到构建平台上;(3)粘合剂喷射,其中构建材料(例如基于粉末的材料)和粘合材料(例如液态粘合剂)的交替的多层通过打印头沉积;(4)熔融沉积成型(fdm),其中材料通过喷口腔被抽出、加热并逐层沉积;(5)粉床熔合,包括但不限于直接金属激光烧结(dmls)、电子束熔化(ebm)、选择性加热烧结(shs)、选择性激光熔化(slm)和选择性激光烧结(sls);(6)片层压(sheet lamination,片层合),包括但不限于分层实体制造(lom)和超声波增材制造(uam);以及(7)定向能量沉积,包括但不限于激光工程净成形、定向光制造、直接金属沉积和3d激光熔覆。例如,可使用立体光刻来直接制造本文中的一个或多个矫治器。在一些实施方式中,立体光刻包括根据期望横截面形状使用光(例如紫外线)对光敏树脂(例如,光聚合物)进行选择性聚合。可通过依次聚合多个物体横截面而逐层构建物体几何结构。作为另一个示例,本文中的矫治器可使用选择性激光烧结来直接制造。在一些实施例中,选择性激光烧结包括根据期望的横截面形状使用激光束来选择性地熔化和熔合粉末材料层,以便构建物体几何结构。作为又另一个示例,本文中的矫治器可通过熔融沉积成型来直接地制造。在一些实施例中,熔融沉积成型包括熔化并以逐层方式选择性地沉积热塑性聚合物的细丝(纤维),以便形成物体。在又一个示例中,可利用材料喷射来直接制造本文中的矫治器。在一些实施例中,材料喷射包括将一种或多种材料喷射到或挤出到构建表面上以形成物体几何结构的连续层。
126.替代地或组合地,本文中的矫治器(或其某些部分)的一些实施例可使用间接制造技术来生产,诸如通过在凹凸模具上进行热成型。正畸矫治器的间接制造可包括依据目标排列来生产患者的牙列(dentition,齿列)的凹凸模具(例如,通过快速原型制作、铣削等)并将一片或多片材料热成型在该模具上,以便形成矫治器壳体。
127.在一些实施例中,本文提供的直接制造方法以逐层方式构建物体几何结构,且通过离散的构建步骤形成连续层。替代地或组合地,可使用允许连续构建物体几何结构的直接制造方法(本文中也称为“连续直接制造”)。可使用多种类型的连续直接制造方法。作为一个示例,在某些实施例中,本文中的矫治器使用“连续液相中间打印”来制造,其中通过在
物体的构建表面与抑制聚合的“死区”之间形成部分固化树脂的梯度,从光聚合树脂的储存容器连续地构建物体。在一些实施例中,使用半透膜来控制光聚合抑制剂(例如,氧)到死区中的转移,以便形成聚合物梯度。连续液相中间打印可实现比其它直接制造方法快约25倍到约100倍的制造速度,且通过结合冷却系统可实现约1000倍的更快的速度。在美国专利公开第2015/0097315号、第2015/0097316号和第2015/0102532号中描述了连续液相中间打印,上述每个专利的公开内容均通过援引的方式整体纳入本文。
128.作为另一个示例,连续的直接制造方法可通过在照射阶段期间构建平台的连续移动(例如,沿着竖直方向或z方向)来实现物体几何结构的连续构建,使得受照射的光敏聚合物的硬化深度受到移动速度的控制。因此,可实现材料在构建表面上的连续聚合。在美国专利第7,892,474号中描述了这种方法,其公开内容通过援引的方式整体纳入本文。
129.在另一个示例中,连续直接制造方法可包括围绕固体线挤出的由可固化液体材料组成的复合材料。该复合材料可沿着连续的三维路径被挤出,以便形成物体。在美国专利公开第2014/0061974号中描述了这种方法,其公开内容通过援引的方式整体纳入本文。
130.在又一个示例中,连续直接制造方法利用“螺旋光刻(heliolithography,海立尔打印技术)”方法,其中液体光敏聚合物在聚焦照射下固化,同时构建平台连续地旋转并升高。因此,物体几何结构可沿着螺旋式构建路径而被连续地构建。在美国专利公开第2014/0265034号中描述了这样的方法,其公开内容通过援引的方式整体并入本文。
131.本文提供的直接制造方法与许多种不同材料兼容,包括但不限于以下中的一种或多种:聚酯、共聚酯、聚碳酸酯、热塑性聚氨酯、聚丙烯、聚乙烯、聚丙烯和聚乙烯共聚物、丙烯酸、环状嵌段共聚物、聚醚醚酮、聚酰胺、聚对苯二甲酸乙二醇酯、聚对苯二甲酸丁二醇酯、聚醚酰亚胺、聚醚砜、聚对苯二甲酸丙二醇酯、苯乙烯嵌段共聚物(sbc)、硅橡胶、弹性体合金、热塑性弹性体(tpe)、热塑性硫化橡胶(tpv)弹性体、聚氨酯弹性体、嵌段共聚物弹性体、聚烯烃共混弹性体、热塑性共聚酯弹性体、热塑性聚酰胺弹性体或其组合。直接制造所使用的材料能以未固化的形式(例如,作为液体、树脂、粉末等)被提供且能够被固化(例如通过光聚合、光固化、气体固化、激光固化、交联等)以便形成正畸矫治器或其一部分。固化之前材料的性质可以不同于固化后的材料的性质。一旦固化,则本文中的材料可显示足够的强度、刚度、耐久性、生物相容性等正畸矫治器中所利用的性质。可根据矫治器相应部分的期望性质来选择所使用的材料的固化后的性质。
132.在一些实施例中,正畸矫治器的相对坚硬的部分可通过使用以下材料中的一种或多种进行直接制造来形成:聚酯、共聚酯、聚碳酸酯、热塑性聚氨酯、聚丙烯、聚乙烯、聚丙烯和聚乙烯共聚物、丙烯酸、环状嵌段共聚物、聚醚醚酮、聚酰胺、聚对苯二甲酸乙二醇酯、聚对苯二甲酸丁二醇酯、聚醚酰亚胺、聚醚砜和/或聚对苯二甲酸丙二醇酯。
133.在一些实施例中,正畸矫治器的相对有弹性的部分可通过使用以下材料中的一种或多种进行直接制造来形成:苯乙烯嵌段共聚物(sbc)、硅橡胶、弹性体合金、热塑性弹性体(tpe)、热塑性硫化橡胶(tpv)弹性体、聚氨酯弹性体、嵌段共聚物弹性体、聚烯烃共混弹性体、热塑性共聚酯弹性体和/或热塑性聚酰胺弹性体。
134.机器参数可包括固化参数。对于基于数字光处理(dlp)的固化系统,固化参数可包括功率、固化时间和/或完整图像的灰度。对于基于激光的固化系统,固化参数可包括功率、速度、光束尺寸、光束形状和/或光束的功率分布。对于打印系统,固化参数可包括材料的下
落尺寸、粘度和/或固化功率。这些机器参数可作为制造机上的工艺控制的一部分而被定期地监控和调节(例如,在每1
‑
x层处的一些参数和每一次构建之后的一些参数)。可通过在机器上设置传感器来实现工艺控制,该传感器测量每层或每几秒的功率和其它光束参数,并通过反馈回路自动调节它们。对于dlp机器,根据系统的稳定性,可在每次构建之前、期间和/或结束时,以及/或者以预定的时间间隔(例如,每个第n次构建、每小时一次、每天一次、每周一次等)来测量和校准灰度。此外,材料性质和/或光学性质可被提供给制造机器,且机器工艺控制模块可使用这些参数来调节机器参数(例如,功率、时间、灰度等)以补偿材料性质的可变性。通过对制造机器实施工艺控制,能够减小矫治器精度和残余应力的可变性。
135.可选地,本文所述的直接制造方法使得能够制造包括多种材料的矫治器,在本文中被称为“多材料直接制造”。在一些实施例中,多材料直接制造方法包括在单一制造步骤中同时由多种材料形成物体。例如,可使用多尖端挤出装置从不同的材料供给源来选择性地分配多种类型的材料(例如,树脂、液体、固体或其组合),以便由多种不同的材料制造物体。美国专利第6,749,414号中描述了这样的方法,其公开内容通过援引的方式整体纳入本文。替代地或组合地,多材料直接制造方法可包括在多个连续制造步骤中由多种材料形成物体。例如,物体的第一部分(例如,矫治器壳体)可根据本文中的任何直接制造方法而由第一材料形成,随后物体的第二部分(例如,一个或多个弹性物)可根据本文中的方法而由第二材料形成,等等,直到形成整个物体。第一部分和第二部分的相对排布可根据需要来改变,例如,物体的第一部分可被第二部分整个地或部分地密封。
136.与其它制造方法相比,直接制造可提供多种优点。例如,与间接制造相反的是,直接制造允许在不使用任何用于使矫治器成形的模具或模板的情况下生产正畸矫治器,从而减少所包括的制造步骤的数量,并提高最终矫治器几何结构的解析度(resolution,分辨率)和精确度。此外,直接制造允许精确控制矫治器的三维几何结构,例如矫治器厚度。复杂结构和/或辅助部件可在单一制造步骤中与矫治器壳体一体地形成为单件,而不是在单独的制造步骤中被添加到壳体。在一些实施例中,使用直接制造来产生使用其它制造技术将难以产生的矫治器几何结构,诸如具有非常小或细小特征、复杂的几何结构、底切、邻间结构、厚度可变的壳体、和/或内部结构(例如用于通过减轻重量和材料用量来提高强度)的矫治器。例如在一些实施例中,本文的直接制造方法允许制造具有小于或等于约5μm、或介于从约5μm到约50μm的范围内或介于从约20μm到约50μm的范围内的多个特征尺寸的正畸矫治器。
137.本文所述的直接制造技术可被用于生产具有大体上各向同性的材料性质的矫治器,例如,沿所有方向大体相同或相似的强度。在一些实施例中,本文中的直接制造方法允许生产沿着所有方向的强度变化不超过约25%、约20%、约15%、约10%、约5%、约1%或约0.5%的正畸矫治器。此外,本文的直接制造方法可被用于以与其它制造技术相比更快的速度来生产正畸矫治器。在一些实施例中,本文中的直接制造方法允许以小于或等于约1小时、约30分钟、约25分钟、约20分钟、约15分钟、约10分钟、约5分钟、约4分钟、约3分钟、约2分钟、约1分钟或约30秒的时间间隔来生产正畸矫治器。这样的制造速度允许例如在例行预约或健康检查期间快速“在诊疗椅边”生产定制的矫治器。
138.在一些实施例中,本文所述的直接制造方法实施针对直接制造系统或装置的多种机器参数的工艺控制,从而确保所得到的矫治器是以高精度制造的。这样的精度可有益于
确保将所需的力系统精确地传递到牙齿以便有效地引起牙齿移动。可实施工艺控制来兼顾由诸如材料性质、机器参数、环境变量和/或后处理参数等的多种来源所引起的工艺可变性。
139.材料性质可基于原材料的性质、原材料的纯度和/或在原材混合料期间的工艺变量而变化。在很多实施例中,用于直接制造的树脂或其它材料应在严格的工艺控制下制造以确保光学性质、材料性质(例如,粘度、表面张力)、物理性质(例如,模量、强度、伸长率)和/或热性质(例如,玻璃化转变温度、热变形温度)方面的可变性很小。用于材料制造工艺的工艺控制可通过对于原材料物理性质的筛选和/或温度、湿度和/或在混合过程期间的其它过程参数的控制来实现。通过对材料制造过程实施工艺控制,可使工艺参数的可变性降低并使每批材料的材料性质更均匀。如本文所进一步讨论的,材料性质中残余的可变性能够通过机器上的工艺控制来补偿。
140.机器参数可包括固化参数。对于基于数字光处理(dlp)的固化系统,固化参数可包括功率、固化时间和/或完整图像的灰度。对于基于激光的固化系统,固化参数可包括功率、速度、光束尺寸、光束形状和/或光束的功率分布。对于打印系统,固化参数可包括材料滴尺寸、粘度和/或固化功率。这些机器参数可作为制造机器上的工艺控制的一部分而被定期地监控和调节(例如,在每1
‑
x层处的一些参数和每次构建之后的一些参数)。工艺控制可通过在机器上设置传感器来实现,该传感器测量每层或每几秒的功率和其它光束参数,并通过反馈回路来对其进行自动调节。对于dlp机器,灰度可在每次构建结束时被测量和校准。此外,材料性质和/或光学性质可被提供给制造机器,且机器工艺控制模块可使用这些参数来调节机器参数(例如功率、时间、灰度等)以补偿材料性质的可变性。通过对制造机器实施工艺控制,可减小矫治器精度的可变性及残余应力的可变性。
141.在很多实施例中,环境变量(例如,温度、湿度、阳光或暴露于其它能量/固化源的状态)保持在很小的范围内,以降低矫治器厚度和/或其它性质的可变性。可选地,机器参数可被调节以补偿环境变量。
142.在很多实施例中,矫治器的后处理包括清洁、后固化和/或支撑件移除过程。相关的后处理参数可包括清洁剂的纯度、清洁压力和/或温度、清洁时间、后固化能量和/或时间、和/或支撑件移除过程的稳定性。这些参数可作为工艺控制方案的一部分被测量和调节。此外,可通过修改后处理参数来改变矫治器的物理性质。调节后处理机器参数能够提供另一种方式来补偿材料性质和/或机器性质的可变性。
143.可根据患者的治疗方案来确定本文的正畸矫治器的构型,该治疗方案例如为包括用于递增地重新定位牙齿的多个矫治器的连续管理的治疗方案。可使用基于计算机的治疗方案和/或矫治器制造方法,从而有助于矫治器的设计和制造。例如,本文所述的一个或多个矫治器部件可借助于计算机控制的制造设备(例如,计算机数控(cnc)铣削、诸如3d打印的计算机控制原型制作等)来数字化地设计和制造。本文所述的基于计算机的方法可提高矫治器制造的精确性、灵活性和便利性。
144.正畸矫治器(如图1a所示)在矫治器的牙齿接纳腔与所接纳的牙齿和/或附接物之间的每个接触点处向牙齿的牙冠和/或定位在牙齿上的附接物施加力。每个这些力的大小及其在牙齿表面上的分布确定了所造成的正畸牙齿移动的类型。牙齿移动的类型通常被描述为挤出、挤入、旋转、倾斜、平移和齿根移动。牙冠的牙齿移动大于齿根的移动被称为倾斜
(tipping)。牙冠和齿根的等称移动被称为平移。齿根的移动大于牙冠的移动被称为齿根移动。
145.牙齿移动可在空间的任一平面中沿任一方向,并且可包括沿一个或多个轴线的旋转或平移中的一个或多个。
146.图2示出矫正装置100的部件及相应的力。矫正装置100可包括被构造且设置为本文所述的、提供牙齿移动力的一个或多个聚合物壳式矫治器。所述多颗牙齿10的每颗牙齿包括齿根12和牙冠14,聚合物矫治器可在牙冠上向牙冠施加力,以便移动每颗牙齿。通过这种方式施加的力可被结合于、或者交替地施加于、或者附加于可通过聚合物壳体在牙齿附接物上的作用而施加的力,如在临时专利号为62/099,965的文献中所公开的,本文通过援引的方式纳入其全部内容。所述多颗牙齿的每颗牙齿可相对于阻力中心移动。
147.所述多颗牙齿10可包括口腔中任何牙齿中的两颗或更多颗。所述多颗牙齿10可包括多颗后齿20的一颗或多颗,诸如多颗臼齿或双尖牙及其组合。例如,所述多颗后齿20可包括双尖牙26、第一臼齿24或第二臼齿22中的一颗或多颗。所述多颗后齿可包括第三臼齿,第三臼齿包括例如智齿。替代地或组合地,所述多颗牙齿10可包括多颗前齿30的一颗或多颗。例如,所述多颗前齿可包括双尖牙、尖牙(犬齿)或门齿中的一颗或多颗。在很多实施例中,所述多颗前齿30包括尖牙32、(犬齿)和一颗或多颗相邻门齿,如门齿34和门齿36。
148.本文公开的很多实施例特别适用于封闭拔牙点,如后齿20与前齿30之间的拔牙点。在很多实施例中,移动一颗或多颗牙齿,以通过沿目标方向105的移动来填充拔牙点。虽然目标方向105能沿任一方向延伸,但在很多实施例中,目标方向105沿箭头方向(例如,沿近远中方向)延伸。可通过矫治器的尺寸和形状、矫治器的接合结构来控制倾斜和/或反向旋转的量,从而借助适当的力来直接移动牙齿。
149.在很多实施例中,每颗牙齿包括相对于施加于牙齿的力的阻力中心,牙齿可绕阻力中心旋转、或大致绕阻力中心在三维空间中旋转。第一臼齿24可包括位于齿根的三根分叉部附近的阻力中心25。第二臼齿22可包括位于齿根的三根分叉部附近的阻力中心23。例如,双尖牙26可包括阻力中心27。尖牙32可包括阻力中心33。门齿34和门齿36可各自包括一阻力中心。本文所述的所述多颗牙齿的阻力中心的位置可对应于本领域普通技术人员已知的阻力中心。
150.向牙齿施加力以使牙齿移动能够对牙齿产生绕绕阻力中心的力矩。在很多实施例中,待移动的目标牙齿(如尖牙32)从聚合物壳式矫治器接受力,该力可以是直接来自壳体内部表面的力或者通过附接物的间接力及其组合。聚合物壳体的直接制造允许在壳体上形成邻间牙齿接合结构,使得在佩戴时接合结构在邻间接合位置140处接触牙齿。根据邻间间隙(如牙齿32与34之间)的尺寸,邻间牙齿接合结构可穿过邻间区域,或者邻间牙齿接合结构可包括超过一个结构,这些结构分别位于邻间间隙的舌侧和颊侧上的类似位置。
151.直接制造技术的使用允许邻间结构形成为横穿邻间间隙从舌侧延伸到颊侧的结构,这样的结构能够具有远小于使用现有技术(如热成型)所可能实现的厚度。例如,邻间接合结构可被制造为在其最窄的点处具有约0.75mm或更小、约0.45mm或更小、约0.20mm或更小、约0.10mm或更小、约0.07mm或更小、甚至约0.05mm或更小的厚度,以允许该结构穿过相对较小的邻间间隙。根据所需的力,可使用多种不同材料中的任一种材料来形成这样的结构;例如,当在一段距离之上施加力来移动牙齿时,邻间接合结构可包括弹性材料,而当所
需的力较大时,邻间接合结构可包括坚硬材料(stiff material)。根据所选的制造技术,该材料可与矫治器壳体的材料匹配或者相异。
152.邻间接合结构还可被成形为厚度变化以匹配邻间间隙的形状,在其最窄的点处变窄且在其它位置保持较厚的厚度。邻间接合结构的接触表面可被成形为与所接合的牙齿形状相符,以使所施加的力能够大范围分布。在某些情况下,邻间间隙最初可能太小,但在治疗期间被扩大以允许邻间接合结构从舌侧穿过到颊侧。例如,第一矫治器可被制造为具有处于邻间间隙的一侧或两侧上的邻间接合结构,以在间隙极窄时施加力,而一旦邻间间隙变宽,则第二矫治器可被制造为具有穿过邻间间隙的邻间接合结构,从而允许横穿邻间的牙齿表面来施加力。相反地,还可执行反向过程,其中邻间间隙变窄,同时第一邻间接合结构穿过该间隙且第二结构延伸到该间隙中,而一旦变窄则不穿过该间隙。
153.接合位置140可被改变以接触牙齿32,以便引导牙齿32进行所规划的移动。牙齿32与聚合物壳式矫治器11的接合结构在位置140处的接合可产生在位置140处作用于牙齿上的力矢量,如箭头141所示。接合结构在位置140处的形状和位置可被选定,以定制(customize,根据需求设定)力141的位置、大小和分布。随着牙齿32通过阻力中心33抵抗力,可得到绕阻力中心的力矩146。力矩146能引起牙齿的旋转32。
154.在很多实施例中,力可被施加于牙齿以产生反力矩,从而由第一力矩与第二力矩之间的差动力矩来提供牙齿的移动。反力矩136可由聚合物壳式矫治器11上制作的牙齿接合结构来提供,以在位于牙齿的咬合部附近的位置130处接触牙齿。替代地或附加地,牙齿上的附接物可通过接触聚合物壳式矫治器11而被接合。接合结构与牙齿在位置130处的接触产生如箭头131所示的力矢量,其与箭头141所示的位置140处的力矢量相反。接合结构在位置130处的形状和位置可被选定,以定制力131的位置、大小和分布。
155.在很多实施例中,被选定用来产生反力矩的位置位于距离阻力中心比距离附接物的接合部位或者沿目标方向驱策目标牙齿的牙冠表面更远处,使得沿目标方向的力矢量大于沿相反方向的反力,以便产生差动力矩并沿目标方向驱策目标牙齿。在很多实施例中,在沿目标方向105驱策牙齿32的位置140处接触牙齿的接合结构比反力位置130更靠近阻力中心33和牙龈,使得反力矩136可与力矩146近似,以便随着牙齿沿目标方向105移动而控制牙齿32的旋转。例如,反力矩136可小于力矩146以允许牙齿随着沿目标方向105的旋转而倾斜、可以大于力矩146以沿远离目标方向105旋转牙冠、或者可与力矩146近似,以在牙齿沿目标方向105移动时保持牙齿32的取向。在很多实施例中,包含聚合物壳体的矫治器11包括用以接合牙齿或者接合牙齿上的附接物的接合结构,并且该接合结构的位置和形状可被设置为提供合适大小的反力,以便提供用以引导牙齿沿目标路径移动的反力矩。
156.在很多实施例中,例如,力矩136与力矩116、力矩117和力矩118相反。力矩116、117和188如图所示地被以相同的方向取向。根据右手三坐标系,力矩136将朝向所述多颗牙齿的一侧(从纸面朝向观察位置向外)取向,而力矩116、力矩117和力矩118将从力矩136朝向牙齿的相反侧以相同的方向取向(从纸面背向观察者向内)。例如,力矩136可朝向该组牙齿的颊侧取向,而力矩116、力矩117和力矩118可朝向该组牙齿的舌侧以相同的方向取向。
157.在很多实施例中,可通过制造聚合物壳体来引起牙齿上的力和反力,其中接合结构具有平衡位置(rest position,静止位置),该平衡位置不同于当与牙齿接合时接合结构所处于的位置。例如,矫治器可被制造成使得咬合及邻间接合结构具有分别对应于位置132
和142的平衡位置,但在患者佩戴该矫治器时通过与牙齿接触而偏移到位置130和140。在一些实施例中,可通过使用多种材料实现接合结构从平衡位置的偏移,其中接合结构可包括坚硬的聚合物材料,且聚合物壳式矫治器连接这两个结构的一部分可包括弹性聚合物材料。随着接合结构从其平衡位置偏移,弹性聚合物材料所提供的势能因此可被用于产生力141和反力131。通过对聚合物材料、接合结构以及聚合物壳式矫治器11连接所述结构的那部分的形状和位置的选择,能够独立地定制牙齿的每个表面上的力的大小、方向、位置和分布。
158.可借助差动力矩来配置所述多颗后齿20的一颗或多颗,以便控制一颗或多颗牙齿的取向。在很多实施例中,后齿的反力矩被设置成阻止后齿的移动。与这些实施例相关的作业显示了将牙齿的牙冠旋转而远离用以移动相邻牙齿的力,能够阻止所述牙齿的移动;而牙齿的牙冠朝向来自相邻牙齿的力的旋转,能够有助于所述牙齿朝向所述相邻牙齿的移动。在很多实施例中,所述多颗后齿20包括一串相邻牙齿,它们被配置为锚固所述矫治器并移动目标牙齿,同时这些多颗相邻的锚固齿较少移动或并不移动。替代地或组合地,所述多颗后齿20的一颗或多颗可被配置成例如朝向目标牙齿移动。
159.在很多实施例中,在一组一颗或多颗后齿和一组一颗或多颗前齿之间提供大的差动力矩,以便锚固后齿。后齿的反力矩可大于前齿的反力矩以便锚固后齿,例如向后齿提供最大的锚固力。
160.在很多实施例中,差动力矩被提供于本文所述的多组牙齿之间,以便对牙齿移动进行更好的控制。在很多实施例中,第一组牙齿包括第一力矩,而第二组牙齿包括第二力矩,并且第一组牙齿的第一力矩与第二组牙齿的第二力矩之间的差动力矩使得前齿和后齿能够进行选择性移动。
161.聚合物壳式矫治器可被构造成使所述多组一颗或多颗牙齿以多种方式相互联接。例如,第一组一颗或多颗牙齿可联接到第二组一颗或多颗牙齿。在很多实施例中,所述第一组一颗或多颗牙齿包括多颗第一牙齿,而聚合物壳式矫治器包括用以在多颗相邻的第一牙齿的每颗上产生第一反力矩的形状,其中第一反力矩包括来自所述多颗相邻的第一牙齿的每颗的、以相同的方向取向的力矩的组合,如本文所阐示并描述的(例如,参照图2)。所述第二组一颗或多颗牙齿可包括多颗第二牙齿,而聚合物壳式矫治器可包括用以在多颗相邻的第二牙齿的每颗上产生第二反力矩的形状,其中第二反力矩包括来自所述多颗相邻的第二牙齿的每颗的、以相同的方向取向的力矩的组合。
162.在很多实施例中,包含力矩的牙齿包括这样的牙齿,该牙齿具有从矫治器施加的力以产生绕阻力中心的力矩或反力矩。包含力矩或反力矩的一组牙齿可包括接合所述牙齿的一颗或多颗以提供绕阻力中心的力矩或反力矩的矫治器。
163.在很多实施例中,所述多个牙齿接纳腔被成形并设置成通过在第一组一颗或多颗牙齿与第二组一颗或多颗牙齿之间延伸的聚合物矫治器来平衡一颗或多颗第一牙齿与一颗或多颗第二牙齿之间的差动力矩。替代地或组合地,所述多个牙齿接纳腔可被成形并设置成平衡一颗或多颗第一牙齿与一颗或多颗第二牙齿之间的第一反力矩和第二反力矩。
164.在很多实施例中,大多数后部的牙齿包括大体暴露的表面16,该表面适合于与聚合物矫治器接合。聚合物壳式矫治器11可在接合位置处产生沿牙冠的后表面的力,如箭头122所示。替代地或附加地,邻间牙齿接合结构可被制造成在一个或多个邻间位置123处接
合牙齿,以提供邻间力124。如箭头122和/或箭头124所示的、前方引导的力产生例如绕第二臼齿22的阻力中心23的力矩126。在很多实施例中,如箭头122和/或箭头124所示的矫治器的力产生例如绕第一臼齿24的阻力中心25的力矩127、以及绕双尖牙26的阻力中心27的力矩128。所述多颗后齿的一颗或多颗可在如110、112或114等位置处接触多个接合结构以产生反力矩。替代地,由于力矩126、127和128的作用相对较小,因此可省略引起这些反力矩的结构。
165.在很多实施例中,为一组一颗或多颗牙齿(例如,为多颗后齿)提供反力矩。该反力矩可包括所述组的牙齿的每颗牙齿的反力矩的总和。组合的反力矩可包括绕组合的阻力中心的反力矩,所述组合的阻力中心远离所述组的牙齿的每颗牙齿的阻力中心。本领域普通技术人员可通过一种或多种已知方式并且根据本文公开的实施例来确定一组牙齿的阻力中心。
166.牙齿接合结构与牙齿在位置110处的接触能够产生如箭头111所示的反力,其与如箭头122所示的力相反,以便产生反力矩116。反力矩116可大于力矩126,使得第二臼齿22的牙冠借助例如力矩126与反力矩116的总和所得到的差动力矩而旋转离开第一臼齿24。替代地,反力矩116可小于力矩126并且还阻止第二臼齿22朝向第一臼齿24的旋转。
167.每颗牙齿的力矩和反力矩可基于施加于该牙齿的力的大小和从阻力中心沿牙齿的延长轴线到力的位置的距离来确定。箭头122所示的力被施加于沿牙齿的延长轴向线与阻力中心23相距距离160处。箭头111所示的反力矩被施加于与阻力中心23相距距离162处。在很多实施例中,力矩126大致等于距离160与箭头122所示的力的乘积。反力矩112大致等于距离162与箭头111所示的附接物110上的反力的乘积。本领域普通技术人员应认识到,可采用许多方式来确定本文所述的力矩,例如沿牙齿相对于阻力中心的多个位置处进行有限元建模并整合多个力矩。
168.牙齿接合结构与牙齿之间在位置112处的接触可产生与箭头122所示的力相反的如箭头113所示的反力,以便产生反力矩117。反力矩117可大于力矩127,使得第一臼齿24的牙冠例如借助由力矩127与反力矩117的总和所得的差动力矩而旋转离开双尖牙26。替代地,反力矩117可小于力矩127且还阻止第一臼齿24朝向双尖牙26的旋转。
169.牙齿接合结构与牙齿之间在位置114处的接触可产生与箭头122所示的力相反的如箭头115所示的反力,以便产生反力矩118。反力矩118可大于力矩128,使得双尖牙26的牙冠例如借助由力矩128与反力矩118的总和所得的差动力矩旋转离开包括尖牙32的目标牙齿。替代地,反力矩118可小于力矩128并且还阻止双尖牙26朝向包括尖牙32的目标牙齿的旋转。
170.虽然参照以多颗后齿作为具有反力矩的锚固物(anchoring block)做了描述,但在很多实施例中,所述多颗后齿可被构造为这样的锚固物:其不具有反向旋转和反力矩且不具有附接物,以便通过联接到所述多颗后齿和一颗或多颗目标牙齿的聚合物壳体来移动一颗或多颗目标牙齿。
171.在很多实施例中,一颗或多颗牙齿沿目标矢量的移动可引起一颗或多颗相邻牙齿的移动。在很多实施例中,尖牙32朝向拔牙点的移动可引起一颗或多颗相邻门齿(例如,门齿34和门齿36)的挤出。在很多实施例中,聚合物壳式矫治器11被构造成向一颗或多颗牙齿提供一个或多个促动力。聚合物壳式矫治器11可被构造成通过聚合物壳体的促动而向门齿
34施加促动力150。在很多实施例中,促动力150并不足以用门齿34在目标位置硬挤门齿34,并且促动力150足以阻止门齿34的挤出。门齿34的挤出与尖牙32的移动可导致矫治器11的偏移增大并使促动力150增大,以便阻止门齿34的进一步挤出。同理,聚合物壳式矫治器可向门齿36施加促动力152和力矩154以阻止门齿36的挤出和倾斜。
172.图2示出根据实施例的用于设计通过直接制造来生产的正畸矫治器的方法200。该方法200可被应用于本文所述的正畸矫治器的任何实施例。方法200的某些或所有步骤可由任何合适的数据处理系统或设备(例如,配置有合适指令的一个或多个处理器)来执行。
173.在步骤210中,确定将一颗或多颗牙齿从初始排列移动到目标排列的移动路径。可根据患者的牙齿或口腔组织的模具或扫描(例如使用蜡咬、直接接触扫描、x射线成像、层析成像、超声成像以及其它用于获得关于牙齿、颌、牙龈和其它正畸相关组织的位置和结构的信息的技术)来确定上述初始排列。从所得到的数据中可获得数字数据集,其表示患者牙齿和其它组织的初始(例如,治疗前)排列。可选地,所述初始数字数据集被处理以将这些组织构成彼此分割。例如,可产生数字化表示的各颗牙齿牙冠的数据结构。有利地,可产生整个牙齿的数字模型,其包括测量的或推测的隐藏表面和齿根结构、以及周围的骨骼和软组织。
174.牙齿的目标排列(例如,正畸治疗的期望和预定的最终结果)能以处方形式从临床医生处收到,且能从基本的正畸原理计算出,和/或能够利用计算机运算而从临床处方推测出。借助牙齿的期望最终位置的描述和牙齿本身的数字表示,可指明每颗牙齿的最终位置和表面几何结构,以形成在期望的治疗结束时牙齿排列的完整模型。
175.每颗牙齿既具有初始位置又具有目标位置,可为每颗牙齿的运动限定移动路径。在一些实施例中,这些移动路径被构造成通过最少量的迂回行程(round
‑
tripping)以最快的方式移动牙齿,以将牙齿从其初始位置送入到其期望的目标位置。可选地,牙齿路径能够被分段,且这些段可被计算以使一个段内的每颗牙齿的运动保持在线性和旋转平移的阈值极限内。通过这种方式,每个路径段的端点可构成临床上可行的重新定位,且段的端点的集合可构成临床上可行的牙齿位置序列,使得该序列中从一点到下一点的移动不会引起牙齿的碰撞。
176.在步骤220中,确定用于产生沿着移动路径的一颗或多颗牙齿的移动的力系统。力系统可包括一个或多个力和/或一个或多个转矩。不同的力系统会引起不同类型的牙齿移动,例如倾斜、平移、旋转、挤压、挤入、齿根移动等。可使用生物力学原理、建模技术、力计算/测量技术等(包括在正畸领域中常用的知识和方法)来确定要施加于牙齿的适当的力系统以实现牙齿移动。在确定所要施加的力系统时,可被考虑的资源包括文献资料、通过实验或虚拟建模确定的力系统、基于计算机的建模、临床经验、最小化不需要的力等等。
177.在步骤230中,确定用于正畸矫治器的矫治器几何结构(该正畸矫治器被构造为产生上述力系统)。该几何结构可包括一个或多个牙齿接合结构,这些牙齿接合结构可被构造成能接合至少一颗牙齿的表面。根据所要在牙齿上产生的力的特性,接合所选择的牙齿表面可以是牙邻面、颊面或舌面、咬合面或牙齿的任何其它表面。所述几何结构还可包括依据正畸矫治器内的位置而对材料的规定,例如规定某些特定部分包括弹性聚合物材料,而其它部分包括坚硬聚合物材料。
178.可使用治疗或力施加模拟环境来执行对矫治器几何结构、材料组成和/或性质的确定。模拟环境可包括例如计算机建模系统、生物力学系统或设备等。可选地,可制作矫治
器和/或牙齿的数字模型,例如有限元模型。有限元模型能够使用可从多个不同的供应商购买到的计算机程序应用软件来创建。为了创建实体几何模型,可使用计算机辅助工程(cae)或计算机辅助设计(cad)程序,例如加州圣拉斐尔的autodesk公司出售的软件。为了创建有限元模型并对其进行分析,可使用来自许多个供应商的程序产品,包括来自宾夕法尼亚州卡农斯堡的ansys有限公司的有限元分析软件包和来自马萨诸塞州沃尔瑟姆的达索系统公司的simulia(abaqus)软件产品。
179.可选地,可选择一个或多个矫治器几何结构以用于测试或力建模。如上文所提及,能够确认出期望的牙齿移动以及为了引起期望的牙齿移动而需要或期望的力系统。使用模拟环境,能够分析或建模备选的矫治器几何结构,以确定通过使用备选的矫治器而得到的实际力系统。可选地,可对备选的矫治器进行一处或多处修改,且还可通过所描述的方式进一步分析力建模,以便例如反复地确定产生所需力系统的矫治器设计。
180.在步骤240中,产生用于制造具有矫治器几何结构的正畸矫治器的指令。这些指令可被配置为用以控制制造系统或设备,以便产生具有指定的矫治器几何结构的正畸矫治器。在一些实施例中,这些指令被配置为根据本文所述的各种方法,使用直接制造方式(例如,立体光刻、选择性激光烧结、熔融沉积成型、直接喷射、连续直接制造、多材料直接制造等)来制造正畸矫治器。在替代的实施例中,这些指令可被配置为例如通过热成型来间接制造矫治器。
181.尽管以上步骤示出了根据一些实施例的设计正畸矫治器的方法200,但本领域普通技术人员应认识到基于本文所述的教导的一些变型。这些步骤中的一些步骤可包括多个分步骤。所述步骤中的一些步骤可根据需要重复多次。方法200的一个或多个步骤可借助任何合适的制造系统或设备来执行,如本文所述的那些实施例。所述步骤的一些步骤可以是可选的,且这些步骤的顺序可根据需要改变。
182.图3示出根据实施例的用于数字化地制定正畸治疗方案和/或矫治器的设计或制造的方法300。该方法300能够被应用于本文所述的任一治疗过程,且能够通过任何合适的数据处理系统来执行。
183.在步骤310中,接收患者牙齿的数字表示。该数字表示可包括患者的口内腔(包括牙齿、牙龈组织等)的表面形貌数据。该表面形貌数据可通过使用合适的扫描设备(例如,手持式扫描仪、台式扫描仪等)直接扫描口内腔、口内腔的物理模型(凸或凹)或口内腔的印模等来产生。
184.在步骤320中,基于牙齿的数字表示产生一个或多个治疗阶段。这些治疗阶段可以是被设计为用于将患者的一个或多个牙齿从初始牙齿排列移动到目标排列的正畸治疗过程的递增的重新定位阶段。例如,这些治疗阶段可通过确定由数字表示所表明的初始牙齿排列、确定目标牙齿排列、以及确定实现目标牙齿排列所需的初始排列中的一颗或多颗牙齿的移动路径来产生。基于最小化所移动的总距离、阻止牙齿之间的碰撞、避免较难以实现的牙齿移动、或者任何其它合适的条件,能够使移动路径最优化。
185.在步骤330中,基于所产生的治疗阶段来制造至少一个正畸矫治器。例如,可制造一组矫治器,每个矫治器均根据某一治疗阶段所指定的牙齿排列而被成形,使得矫治器能够被患者按顺序佩戴,以将牙齿从初始排列递增地重新定位到目标排列。该矫治器组可包括本文所述的正畸矫治器中的一个或多个。矫治器的制造可包括创建矫治器的数字模型,
该数字模型会被用于输入到计算机控制制造系统。根据需要,该矫治器可使用直接制造方法、间接制造方法或两者的组合来形成。
186.在一些情况下,矫治器的设计和/或制造可能不需要进行各种不同的排列或治疗阶段。如图3中的虚线所示,正畸矫治器的设计和/或制造以及可能的特定正畸治疗可包括使用患者牙齿的表示(例如,接收患者牙齿的数字表示310),随后基于由所接收的表示所表达的排列中的患者牙齿的表示,来设计和/或制造口腔正畸矫治器。
187.图4是可用于执行本文所述的方法和过程的数据处理系统400的简化框图。数据处理系统400通常包括经由总线子系统404与一个或多个外围设备通信的至少一个处理器402。这些外围设备通常包括存储子系统406(存储器子系统408和文件存储子系统414)、一组用户界面输入和输出设备418以及到外部网络416的接口。该接口被示意性地示出为“网络接口”方框416,且经由通信网络接口424联接到其它数据处理系统中的对应接口设备。数据处理系统400可包括例如一个或多个计算机,诸如个人计算机、工作站、大型机(主机)、笔记本电脑等。
188.用户界面输入设备418不限于任何特定设备,且通常可包括例如键盘、定点设备、鼠标、扫描仪、交互式显示器、触摸板、操纵杆等。同样地,在本发明的系统中可使用多种用户界面输出设备,且可包括例如打印机、显示器(例如,视觉、非视觉)系统/子系统、控制器、投影设备、音频输出等设备中的一个或多个。
189.存储子系统406保持基本需求的编程,包括具有指令(例如,操作指令等)的计算机可读介质以及数据结构。本文所讨论的编程模块通常存储在存储子系统406中。存储子系统406通常包括存储器子系统408和文件存储子系统414。存储器子系统408通常包括多个存储器(例如,ram 410、rom412等),上述存储器包括用于存储固定的指令、指令和程序执行期间的数据、基本输入/输出系统等的计算机可读存储器。文件存储子系统414为程序和数据文件提供持久(非易失性)存储,且可包括一个或多个可移除或固定的驱动器或介质、硬盘、软盘、cd
‑
rom、dvd、光盘驱动器等。存储系统、驱动器等中的一个或多个可位于远程位置,例如通过网络上的服务器或通过互联网/万维网来联接。在上下文中,通常使用术语“总线子系统”以便包括用于使多种部件和子系统按预期彼此连通的任何机构,并且可包括会被知晓或被认为适合在该系统中使用的各种各样的合适的部件/系统。应认识到的是,系统的多种部件可以、但并非必须处于相同的物理位置,但可经由多种局域或广域网络媒体、传输系统等连接。
190.扫描仪420包括:用于(例如,通过扫描诸如铸型421的牙齿物理模型、通过扫描通过牙齿获得的印模、或通过直接地扫描口内腔)获得患者牙齿的数字表示(例如,图像、表面形貌数据等)的任何装置,所述数字表示可从患者或专业治疗人员(例如,正畸医生)处获得;以及包括向数据处理系统400提供所述数字表示以供进一步处理的装置。扫描仪420可位于相对于系统的其它部件的远程位置,且可例如经由网络接口424而将图像数据和/或信息传送到数据处理系统400。制造系统422基于治疗方案(包括从数据处理系统400接收的数据集信息)来制造矫治器423。制造机422可例如位于远程位置处,并经由网络接口424从数据处理系统400接收数据集信息。
191.本文所述的方法的数据处理方案可通过数字电子电路、或通过计算机硬件、固件、软件、或以上它们的适当组合来实施。数据处理装置能够在用于由可编程处理器运行的机
器可读存储设备中可明确具体化的计算机程序产品中实施。数据处理步骤可通过运行程序指令的可编程处理器来执行,从而通过基于输入数据操作并产生输出来执行多个功能。可通过能在可编程系统上运行的一个或多个计算机程序来实施数据处理方案,该系统包括可操作地联接到数据存储系统的一个或多个可编程处理器。通常,处理器将从只读存储器和/或随机存取存储器接收指令和数据。适用于可明确具体化的计算机程序指令和数据的存储设备包括所有形式的非易失存储器,例如:半导体存储器设备,诸如eprom、eeprom和闪存设备;磁盘,诸如内置硬盘和可移动式磁盘;磁光盘;以及cd
‑
rom磁盘。
192.直接制造矫治器壳体的能力使得能够生产非常多种类的结构,以允许通过多种方式调整施加于牙齿的正畸力。图5a至图5e示出可制造矫治器壳体以便与牙齿表面接合的多种不同的方式。
193.图5a示出所制造的壳体501与牙齿503之间的接合机构500。所制造的壳体501具有邻间牙齿接合结构502,该邻间牙齿接合结构502被制造为适配在牙齿503之间的邻间区域中。随着邻间牙齿接合结构502和牙齿503发生接触,可将力从壳体501传递到牙齿503。此力可在其中一颗牙齿503上或两颗牙齿503上均提供正畸力,由此可引起牙齿沿期望方向移动。
194.图5b示出所制造的壳体511与牙齿512之间的另一个接合机构510。壳体511被制造为具有牙齿接合结构513,牙齿接合结构513被构造为接合位于牙齿512的牙龈部分上的咬边514。例如,接合结构513可被制造成具有比壳体511的其它部分更大的厚度,或者由与壳体511不同的材料制成,以便进一步定制能够通过接触咬边514施加的力。在可通过接触力施加在牙齿512上的力中,处于接合结构513与咬边514之间的力是挤出力,其可通过将力沿咬合方向施加在壳体511上来施加,由于壳体511与一个或多个其它牙齿之间的接触,该力可被沿牙龈方向的力所平衡。
195.图5c示出如何使壳体可被制造成接合牙齿的咬边。臼齿515与包括咬边接合表面517的壳体516发生接触,咬边接合表面517在咬边519上施加挤出力518。挤出力518可被调整(tailor,剪裁)以导致臼齿515被挤出。
196.图5d和图5e示出在所制造的壳体的设计中可用的其它选项。在图5d中,壳体520可制造成具有光滑外层521和不规则内层522。内层的形状可通过任何期望的方式来改变,以便定制壳体520与牙齿之间的接合。例如,表面522的多个不同部分可做得较厚,从而在特定的点处沿特定方向对牙齿的表面施加一组力,同时表面522的其它部分可做得较薄,以允许牙齿沿某一方向移动或避免沿不需要的方向施加力。图5e的壳体530中示出另一可选的构型,其被制造成具有与牙齿表面紧密相配的部分523和从牙齿表面向外延伸的第二部分524,以便例如使附接物能够适配于表面部分524内并且可选地与表面部分524接合。
197.图6示出可被施加用以引起牙齿绕竖直轴线的旋转的多个力。图6从两个不同的视角示出接合壳体的牙齿。侧视角600示出沿近远中向的视图,其中,所制造的壳体601接触牙齿602以引起绕竖直轴线605的旋转。壳体601被制造成在牙齿的相反两侧上具有牙齿接合表面603和604。接合表面603在牙齿602的舌面上施加力606,而表面604在远端侧上施加力。通过设计壳体601以及接合表面603和604,可调整牙齿602上的力以引起旋转。
198.顶视角610示出沿咬合
‑
牙龈轴线(对应于竖直轴线605)的系统。接合表面603与牙齿602的舌侧之间的接触产生沿颊侧方向的力613。接合表面604与牙齿602的颊侧之间的接
触产生沿舌侧方向的力614。这些相反的力产生绕牙齿602的竖直轴向的力矩615,其可使牙齿旋转。可通过壳体601以及接合表面603和604的设计来调整力613和614。例如,壳体601可由柔性材料制成,而接合表面603和604可包括刚性材料。如果壳体结构被设计成使得接合表面603和604的平衡位置更为接近(相比牙齿的宽度),接合表面603和604将在佩戴矫治器时被牙齿602偏移分开。这种偏移在柔性壳体中储存弹性势能,使得随着壳体自身朝向其平衡构型拉回而产生力613和614。此力的大小可通过改变接合表面603和604的位移程度、壳体601的柔性部分的弹性等这类特性而改变。
199.图7a示出可使用所制造的接合结构(例如,邻间接合结构)有益地施加于牙齿的力。牙齿700接触邻间牙齿接合结构701和702以引起旋转703。邻间牙齿接合结构701和702连接到壳体,该壳体被制造成使邻间牙齿接合结构沿近远中轴线朝向彼此拉动。邻间牙齿接合结构701和702与牙齿700之间的接触力引起牙齿的旋转703。
200.在牙齿710的移动中示出了可由适当制造的接合结构和壳体引起的另一种类型的移动。牙齿710在牙龈表面附近与邻间接合结构711和712接合,且在咬合面附近与接合结构713接合,以便引发牙齿710中的倾斜运动。壳体被构造成沿远端方向拉动邻间接合结构711和712的同时沿近中方向拉动接合结构713。来自接合表面与牙齿710之间的接触的相反的力产生绕牙齿710的颊
‑
舌轴线的净力矩(net moment),在牙齿绕颊
‑
舌轴线旋转时导致牙齿沿近中方向的倾斜。邻间接合结构711和712被制造在相对的舌侧和颊侧上以提供平衡力,从而并不引起不必要的绕牙齿710的竖直轴线的旋转。在某些情况下,例如当存在相当大的邻间间隙时,接合结构711和712可被合并为单个接合结构。
201.图7b示出邻间接合结构可被设计为接合牙齿的多个典型位置。牙齿730与以下4个邻间接合区域一起被示出:近舌区域740、远舌区域745、近颊区域750和远颊区域755。通常,接触牙齿的邻间接合结构将被制造成使其在这些区域的至少一个中接触牙齿的表面。典型的接触点可位于颊
‑
舌轴线上且相距牙齿的中心与相距牙齿的最远点的距离大致相同,或者相对于最远点更接近中心。在某些情况下,邻间牙齿接合结构可被制造成使其完全处于牙齿之间,以允许其大体在中心处接触牙齿。例如,邻间接合结构可在区域740与750之间接触牙齿730、或者在区域745与755之间接触牙齿730。邻间接合结构的高度还可自由地变化,以使其可在多个高度中的任一高度处接触牙齿。
202.图8a中示出使一颗或多颗牙齿能够平移移动的、直接制造的壳体的另一构型。前齿802与后齿803之间的间隙801会被封闭(例如通过施加图2中所示的力)。间隙的封闭将引起牙齿802和803朝向彼此的移动。壳体805可被制造为允许、驱策或引导这种移动的方式。例如,壳体805可包括与牙齿在间隙801的近端处接触的近中部(mesial portion)805、与牙齿在间隙801的远端处接触的远部(distal portion)806、以及至少部分位于间隙801的区域内的间隙部807。为了允许牙齿802和803移动以填充间隙801,间隙部807可被制造成比壳体804的其它部分更为柔性。例如,间隙部807可被制造成比部分805和806更薄。替代地或附加地,间隙部807可被制造成具有比部分805和806更为柔性的材料。在一些实施例中,间隙部807可被构造为施加弹性力以封闭间隙801。例如,间隙部807可包括直接制造的弹簧结构。
203.图8b示出可如何运用邻间接合结构协助将所制造的壳体锚固到一颗或多颗牙齿,以便例如提供如图2和图8b中所示的运动。理想的是,当封闭前齿812与后齿813之间的间隙
811时,将壳体810稳定地锚固到后齿813。通常,这种锚固可通过接触开放的后齿表面(如表面814)来实现。但是,附加地或替代地,矫治器壳体可被制造成具有例如结构815和816之类的邻间接合结构。这些结构可接合牙齿813的牙邻面以提供锚固力,牙齿移动力被施加为抵抗该锚固力。在某些情况下,结构815和816包括横穿邻间间隙延伸的单个连接结构。这样的结构可被用于环绕牙齿的大部分表面积。例如,在多个方案中,本文公开的邻间结构可提供接触或覆盖牙齿的大部分或全部周面的牙齿接纳结构,其中牙齿的周面包括牙齿的牙邻面、舌面和颊面。例如,这样的牙齿接纳结构可覆盖牙齿(诸如臼齿)的周面的50%或更多。在某些情况下,牙齿接纳结构可覆盖牙齿的周面的60%或更多、70%或更多、或者80%或更多。特别地,用于门齿、犬齿和前臼齿的牙齿接纳结构可提供这样的较大覆盖面积。替代地,可使用较小的牙齿覆盖范围;例如,可覆盖牙齿表面的周面的小于50%、小于20%、小于10%、或小于5%。在某些情况下,第一牙齿接纳腔可被成形为在佩戴时接合第一牙齿的大部分周面,而第二牙齿接纳腔可被成形为在佩戴时接合第二牙齿的较小部分周面。而且,本文公开的邻间结构能够(与舌面和颊面上的壁相结合)提供沿牙齿的大部分或整个周部的接合,例如环绕牙齿的周部的90%或更多、甚至环绕牙齿的整个周部接合。这样的结构不仅允许对牙齿的牢固锚固,还允许沿很多不同的方向施加力,并且允许牙齿到特定位置及取向的约束或移动。例如,通过邻间接合结构移动牙齿时,该结构还可通过将牙齿保持在所需方向以及阻止牙齿移出预定轨迹来阻止侧向移动的不需要的旋转。由于可减少不需要的移动或旋转而导致的误差,因此这个特征会进一步对治疗方案有益,进而能够更精确地估计治疗效果。
204.进一步阐示通过正畸矫治器上的邻间结构的直接制造可能产生的牙齿移动的范围,图9a绘示出可如何构造多个牙齿接合结构构造来治疗牙间隙。邻间牙齿接合结构901被安置在两颗中门齿902的相对两侧上,以在每颗中门齿上提供朝向中线的牙齿移动力。多个附加的牙齿接合结构903沿中线被安置在更接近咬合面之处,以提供反力矩。每个牙齿接合结构均被附接到矫正器的弹性部分,使得该结构通过其所接触的牙齿的几何结构而从该结构的平衡位置偏移。这使得每个牙齿接合结构沿图9a所指明的各个方向施加弹性力。这些力的集成效果是中门齿902朝向中线的平移,封闭牙间隙904。本领域普通技术人员应理解的是,同样可运用这一设计来封闭其它几对牙齿之间的间隙。
205.图9b示出可如何运用邻间牙齿接合结构来引发中线移位。邻间牙齿接合结构911可被制造为使得每个邻间牙齿接合结构接触牙齿的选定侧,例如所阐示的每颗中门齿912的右侧。与每个邻间牙齿接合结构911相对的是另一个牙齿接合结构913,其安置在接近咬合面处以提供反力矩。每个牙齿接合结构均被附接到矫正器的弹性部分,使得该结构通过其所接触的牙齿的几何结构而从该结构的平衡位置偏移。这使得每个牙齿接合结构沿图9b指明的各个方向施加弹性力。这些力的集成效果是中门齿912向左的平移,以产生朝向左方的中线移位914。通过使每个结构的位置相对于中线在镜像中移位,则反而可引起朝向右方的运动。本领域普通技术人员应理解的是,根据期望,同样可运用这一设计来移动其它牙齿,包括单颗牙齿或成组的多于两颗的牙齿。
206.图9c示出相对地安置于牙齿的颊侧和舌侧上的一对邻间牙齿接合结构如何可用于施加本文所述的多种结构中任一结构的牙齿移动力。图9c示出从构造成封闭牙间隙(如图9a所示)的多个牙齿接合结构的咬合面观察的视图。图9a的每个邻间牙齿接合结构901被
替换为门齿902的相对的颊侧和舌侧上的一对邻间牙齿接合结构。这些结构(又称颊侧邻间牙齿接合结构901b和舌侧邻间牙齿接合结构901l)集成地提供沿所示方向的牙齿移动力,而任一颊侧力或舌侧力可被牙齿的相对面上相应结构的力抵消。同样地,反力矩牙齿接合结构902(位于咬合面附近)被替换为颊侧牙齿接合结构903b和舌侧牙齿接合结构903l以达到相似的效果。例如当牙齿被极紧密地设置为使牙齿接合结构能够适配于牙齿之间的间隔内时,牙齿接合结构的这一构型可能是理想的。
207.图9d示出可如何将矫正器构造成使牙齿接合结构在牙齿上施加力。如图所示,矫正器被佩戴在患者的牙齿上,使矫正器和牙齿接合结构均与患者牙齿中的一颗或多颗牙齿接触。牙齿接合结构包括实体的突出部(如所标示出的),该突出部被附接到矫正器。在所附接的区域中,矫正器包括弹性材料,使得该实体突出部可移动。矫正器被制造成使该实体突出部在矫正器的标称设计中的位置不同于其被佩戴在患者口腔中时的位置。通常,这一不同可在约1至2mm左右的范围内,且在佩戴时突出部偏移的方向与期望的力的方向相反。当被安装在患者口腔中时,牙齿的几何结构将引导突出部进入邻间空间,以使矫正器的弹性部分伸展,并在其中储存弹性势能。此弹性势能引起可用于产生牙齿移动的恢复力。
208.如图9d所示的可移除的矫治器使用混合的弹性材料和刚性材料提供了多种优于仅使用刚性材料的现有系统的优点。第一,弹性材料允许力在多个接触点处施加于牙齿上。单独使用刚性材料的情况下,在一些实施例中不可能同时将力施加于牙齿的超过三个点,因为使用四个或更多接触点会出现不稳定的系统。在没有用任何特定理论约束的情况下,与“四足座椅会摇摆而三足座椅不会”类似的原因也会导致这样的现象。在刚性材料中,无论施加还是不施加力,都几乎不允许存在误差。牙齿的小的移动或矫治器中的缺陷均可能导致使力被消除。在某些情况下,这种限制会导致产生不需要的力和力矩,而在其它情况下则不能施加所需要的力和力矩。弹性材料的使用解决了这个潜在的问题,因为现在施加于每个接触点的力均可被顺利地改变。结合在接触点处使用刚性材料,这使得能够在每颗牙齿上不同的精确选定的点处施加可变力。
209.第二,弹性材料和刚性材料的混合使用,提供了比现有系统中可用的更大的操作范围。某些现有系统的可移除的矫正器具有约0.2至0.25mm的可操作范围,可能需要几十个矫正器使牙齿在数个毫米的预定轨迹上移动。弹性材料可提供更大范围的运动:例如大致1至2mm或更多。这使得每个矫治器能够将牙齿移动相当大的距离,从而允许使用某些系统先前所需的矫治器数量的四分之一或十分之一(如果不是更少)调节患者的牙齿。
210.第三,大范围的运动允许治疗更为柔性(灵活)。在某些情况下,患者的牙齿并未响应于所施加的力而按照预期的设定来移动。在这些情况下,基于预期的牙齿位置制造的矫治器可能并不匹配患者牙齿的实际位置。通过弹性材料和刚性材料的混合制造的矫治器允许更大范围的运动,因此允许更大的柔性。尽管患者的牙齿从其预期位置偏移1或2mm或更多,包括弹性材料的矫治器仍能够接纳牙齿。这种更大的柔性能够避免可能还需要重新制造矫治器以兼顾非期望的牙齿移动的情况。
211.具有本文公开的邻间接合结构的矫治器可被提供为具有不同邻间接合结构和/或牙齿接纳腔的一系列矫治器,以便提供牙齿移动力来使牙齿沿轨迹从第一位置及取向移动到第二位置及取向。在某些情况下,这一系列的矫治器可包括不同形式的多个邻间接合结构,从而在每个治疗步骤更好地接合邻间空间。例如,图10a示出构造成多个矫治器1010、
1020和1030的一部分,它们依次地作用于牙齿1001和1002以接合牙齿的邻间空间,从而产生牙齿移动力。这里所阐示的每颗牙齿还可对应于被成形为接纳各颗牙齿的牙齿接纳腔;因此,例如,矫治器1010包括成形为接纳牙齿1001和1002的牙齿接纳腔。在一些情况下,本文公开的邻间接合结构可与牙齿接纳腔的某些部分连续形成或被其取代。矫治器1010包括多个邻间接合结构1014,每个邻间接合结构位于每个颊侧和舌侧上。邻间接合结构1014延伸到牙齿1001与1002之间的邻间空间中且并不完全穿过邻间间隙。这一构型可在牙齿1001和1002具有极小邻间间隙或没有邻间间隙时(例如在牙齿紧密接触在一起时)使用。例如在矫治器壁1012向内压靠牙齿时,或者在从矫治器的其它部分(例如,如图8b所示的锚固部)通过矫治器传输的力拉动或驱策牙齿时,邻间接合结构1014可施加牙齿移动力。邻间接合结构1014还可施加多个力(例如通过抵抗施加于牙齿的其它牙齿移动力)以使牙齿1001和1002保持就位。邻间接合结构1014还可提供舌侧或颊侧矫正力,例如,通过将抵抗力施加于牙齿1001和1002以通过在矫正(对齐)位置或取向提供比未矫正(未对齐)位置或取向更多的空间而沿颊或舌的方向驱策牙齿。
212.在牙齿1001和1002具有小的邻间间隙时可佩戴矫治器1020,但该邻间间隙足以使邻间接合结构能够适配在牙齿之间。因此,矫治器1020包括穿过牙齿1001与1002之间的邻间间隙并邻接舌侧和颊侧矫治器壁1022的邻间接合结构1024。例如,在矫治器1010使牙齿1001与1002之间的邻间间隙稍微变宽之后,可使用矫治器1020。邻间接合结构1024可包括一实体结构,其在矫治器的舌面和颊面附近较宽,而在如图所示的邻间区域中变窄以便与牙齿的形状相适配。替代地,邻间接合结构1024可包括在邻间区域中相互接近(且可选地连接)的薄壁,从而在这些壁之间提供空间。作为另一个替代方案,邻间接合结构1024可包括单层壁,该单层壁具有直接从矫治器的舌侧延伸到颊侧的大体均匀的厚度。邻间接合结构1024可根据需求从咬合区域向下延伸到牙龈附近的点,或者并不到达这样的点。该结构可被成形为使其竖直尺寸在牙齿1001和1002的接触点上方或下方匹配牙齿的形状,或者可选地上方和下方均匹配牙齿的形状。因此,特别是在牙齿的相反两侧上设置其它邻间结构的情况下,牙齿1001和1002可大体上被与牙齿表面接触的壁包围。
213.(现在)阐示关于矫治器1030的治疗中的进一步的步骤,其中可在牙齿1001和1002具有较大的邻间间隙时佩戴矫治器1030。因此,邻间接合结构1034较宽且可包括横穿间隙或两个单独的壁延伸的实体件,每个壁均在舌侧壁与颊侧壁1032之间延伸,并且每个壁均接触单个牙齿且其间存在空隙。可选地,邻间接合结构可包括有弹力的或弹性的材料。例如,接合结构可包括在与牙齿接触的点处且环绕该接触点的坚硬材料,同时包括延伸到颊侧壁和/或舌侧壁的弹性材料。替代地,邻间接合结构可以仅包括弹性材料、或仅包括坚硬材料。虽然矫治器1010、1020和1030已被描述为使牙齿1001和1002之间的邻间间隙依次变宽,但应理解的是,相反的过程也是可能的。例如,邻间接合结构1034、1024和1014能够被用于在牙齿1001和1002一起移动时提供对牙齿1001和1002的抵抗力或矫正力,在此情况下,可随着邻间间隙变窄而按顺序佩戴矫治器1030、1020和1010,以将牙齿1001和1002引导到最终矫正位置。而且,邻间接合结构的位置和角度可在所述多个矫治器中是变化的,以调整所施加的力的大小、所施加的力的角度和力施加在牙齿上的位置,以便产生期望的牙齿移动。例如,随着牙齿1001和1002移动,还能够通过使用随后的矫治器、借助调节施加于牙齿的力进行校正的方式改变牙齿位置或位置。邻间接合结构还可被成形为用以接合牙齿的多
个表面或者穿过邻间间隙的连续表面,并且被成形为能施加约束力以在位置及取向两个方面沿轨迹引导牙齿。
214.除了改变宽度以引起牙齿移动之外,具有邻间结构的矫治器还可改变邻间结构与牙齿的接触角,其可被用于引起诸如旋转之类的更复杂的运动。例如,图10b示出多个矫治器1040、1050和1060,每个矫治器包括在矫治器壁1042、1052和1062之间沿舌
‑
颊方向延伸的相应的邻间接合结构1044、1054和1064。这些邻间接合结构被成形为穿过牙齿1003与1004之间的邻间间隙。每个邻间接合结构以不同角度取向,并且在不同位置处接合牙齿1003和1004以施加牙齿移动力。起初,牙齿1003和1004倾斜而未对齐;通过与邻间接合结构1044的接触而施加使牙齿朝向期望的取向旋转的牙齿移动力。所施加的力不需要垂直于牙齿的接触表面;例如,邻间接合结构可被成一角度地取向,使得所述力包括矫正器的表面与牙齿之间的摩擦力。在确定需要传递到牙齿的力时此摩擦力能被补偿。在一些程度的移动之后,矫正器1050设有邻间接合结构1054,该邻间接合结构1054被设置成以不同角度接触牙齿以继续施加期望的移动。最终,矫正器1060以第三角度提供邻间接合结构1064,牙齿1003和1004到达其期望的取向。
215.图11示出使用邻间结构的牙齿移动的另一个示例。牙齿1001和1002起初并未沿舌
‑
颊的方向对齐,需要矫正以便被合适的对齐。特别地,牙齿1001被示出为初始时并未沿舌的方向(向上)对齐,而牙齿1002并未沿颊的方向(向下)对齐。因此,设置多个矫治器1110、1120和1130与相应的邻间接合结构1114、1124和1134以施加牙齿移动力。这些矫治器被制造为具有邻间接合结构,这些邻间接合结构具有比横穿间隙而从牙齿1001的舌面到牙齿1002的颊面的距离小的静止长度(rest length,止动长度)。在佩戴时矫治器1110的结构由此沿颊
‑
舌方向伸展,因此提供如所示出的趋向于移动牙齿1001和1002而使其对齐的力。矫治器1110的伸展可包括弹性材料在邻间结构1114的伸展、弹性结构在矫治器壁1112中的弯曲、或者上述两者的结合,其中壁1112和邻间结构1114均包括弹力的或弹性的材料。随着牙齿朝向对齐状态移动,可提供一新的矫治器1120,其邻间结构1124的长度相应地变短以保持牙齿移动力。矫治器1130阐示了利用矫治器的进一步的步骤,其中邻间结构1134包括与期望的舌
‑
颊距离(例如,牙齿1001和1002的宽度)相等的长度,由此使牙齿1001和1002实现期望的正畸矫正。
216.在另一个方案中,矫治器可被制造成包括多个邻间结构,这些邻间结构被构造为适配在牙齿的邻间区域中并且向其施加单独的力。图12a和图12b示出相应的矫治器1210和1220的一部分,每个矫治器均包括邻间接合结构以将力施加于牙齿1201和1202。在图12a的矫治器1210中,弹力的或弹性的矫治器壁1212被设置在牙齿1201和1202的相对的舌侧和颊侧上。包括相对坚硬的材料的邻间接合结构1214被设置在矫治器壁上并且被定位成适配在牙齿1201与1202之间的邻间区域中。虽然被示出为三角楔形,但应理解的是,邻间接合结构1214可呈现多种形状,例如被成形为沿循牙齿1201和1202的邻间区域的轮廓。邻间接合结构1214的尺寸足够大,大于矫治器壁1212与邻间空间之间的标准空间;因此,由于壁包括弹性材料,在佩戴时所述壁变形,如变形部1216所示。变形材料的弹性提供了将邻间接合结构驱动到邻间间隙中的恢复力,从而在牙齿1201和1202上提供牙齿移动力,如图所示。
217.图12b示出具有坚硬的壁1222和弹性的邻间接合结构1224的矫治器1220的第二构型,邻间接合结构1224被设置成在邻间间隙中接合牙齿1001和1002。同样地,邻间接合结构
1224太大而不能适配于邻间间隙中。在这种情况下,邻间接合结构1224包括弹性材料;因此,邻间接合结构变形以适配于间隙中,通过结构1224沿牙齿1201和1202的表面的弯曲来表示,从而提供变形恢复力以向牙齿1201和1202提供牙齿移动力。如图12a所示,虽然邻间接合结构1224被示出为变形的三角楔形,但应理解的是,邻间接合结构1224在变形之前和变形之后可呈现多种形状,例如被成形为沿循牙齿1201和1202的邻间区域的轮廓。还应理解的是,参照图12a和图12b,邻间接合结构1214和1224可被设置在牙齿的任一侧,诸如舌侧、颊侧或咬合侧,而附加的邻间接合结构可被设置成同时地接合邻间区域的各侧的组合,例如位于邻间区域的舌侧和颊侧两者上。此外,可设置类似的矫治器,其中矫治器的壁和邻间接合结构均是弹性的,因此均可变形以施加力。
218.邻间接合结构还可被用于在多个单独的牙齿表面上施加力。图13a示出矫治器1310,其中第一邻间接合结构1314穿过两颗牙齿1301与1302之间的邻间区域,而第二邻间接合结构1315穿过两颗牙齿1303与1304之间的邻间区域。两个邻间接合结构1314和1315联接到矫治器1310的壁,并且被设置成使得这两个结构之间的距离小于相应的邻间间隙之间的初始距离。因此,邻间接合结构和/或矫治器壁被扭曲而而脱离其平衡位置,从而产生驱策牙齿1302和1303如图所示地移动的恢复力,进而通过封闭间隙1305来移动两颗牙齿而使其对齐。可使用多个矫治器来以这种方式连续施加牙齿移动力;例如,矫治器1320包括邻间接合结构1324和1325,(考虑到患者牙齿的干涉移动)这两个邻间接合结构被移位至不同位置。矫治器1320的邻间接合结构因而可继续沿期望的轨迹驱策患者的牙齿。应理解的是,通过将牙齿1302和1303移动得相距更近,牙齿1302和1303分别被移动得距离牙齿1301和1304更远。这样可以从牙齿1302和1303消除施加于牙齿1301和1304上的力,这可引起牙齿1301和1304进一步移动到更好的对齐状态;例如,这些牙齿可跟随其相邻牙齿朝向间隙1305以改善牙齿间距的整体平衡。
219.参照图13a所述的牙齿移动力不仅可通过多个邻间接合结构来施加,还可分别通过各个邻间接合结构来施加。例如,图13b示出具有单个邻间接合结构1334的矫治器1330,其中单个邻间接合结构1334被设置成跨越牙齿1351与1352之间的邻间空间。邻间接合结构1334被设置成将力施加在牙齿1352上以沿预期方向驱策该牙齿;例如使其进入空间1355中。例如,矫治器可基于位于矫治器上某位置处的一个或多个牙齿接纳腔的锚固来施加牙齿移动力,如图8b所示。可选地,这些锚固件可包括相应的邻间接合结构。通过考虑到牙齿的干涉运动而将邻间接合结构重新定位,一系列的矫正器能够继续沿预期轨迹驱策牙齿1352。如上文参照图13a所讨论的,牙齿1352的移动还可消除牙齿1352与1351之间的力,从而使两颗牙齿移位至较好的对齐状态。
220.虽然邻间接合结构(如结构1334和1344)可在某些情况下横越牙齿的表面施加力,但在其它情况下,邻间接合结构可在多个位置中接合牙齿的邻间区域以施加多个力,从而产生净力和/或净力矩以引起牙齿移动。例如,图13c示出多颗牙齿1361、1362和1363,其中矫治器包括接合牙齿1362的一个或多个邻间接合结构,以便将牙齿1362沿近远中向推向牙齿1363。一个或多个邻间接合结构在牙齿1362的表面上的接触产生了多个力。舌侧上的第一力1364同时沿颊的方向和近远中向驱策牙齿1362,而第二力1365同时沿舌的方向和近远中向驱策牙齿1362。所述多个力的颊分量和舌分量部分地或完全地消除,而同时加入近远中力以产生合力1366而沿近远中向驱策牙齿1362朝向牙齿1363。因此,本文所述的牙齿移
动力和力矩例如能够作为两个或更多牙齿移动力或力矩的合力而被产生。
221.诸如本文所述的增材制造等直接制造技术特别有利于制造邻间结构,因为这样的结构能够生产出现有技术(如间接制造)中不能获得的性能。例如,牙齿的邻间间隙很窄,且因此成形为适配在这些间隙中的邻间结构应该足够薄来与之配合。邻间接合结构还常常需要具有小曲率半径的尖锐弯曲表面。例如,根据现有技术制造的聚合物矫治器被局限于可实现的曲率半径,其中矫治器的一部分的曲率半径被材料的厚度所约束。这种约束尤其与矫治器的力施加部相关(如本文所述的邻间接合结构所使用的)。例如,对比现有的聚合物矫治器,本文公开并根据本文公开的方法制造的矫治器能够生产出包括牙齿接合结构的结构,其中曲率半径小于结构的厚度的三分之一。
222.图14示出具有突出部1430的示例性结构1400,该突出部1430具有曲率半径1440。该结构还包括厚度1420,曲率半径1440小于厚度1420的30%。这使得突出部1430能延伸到诸如邻间间隙之类的空间中,并以现有装置中不能实现的方式来施加力。在一些实施例中,突出部(如突出部1430)可从壳体延伸,以在例如突出部的顶点或侧边处接合牙齿表面。附加地或替代地,突出部可从其它结构延伸;例如,第一突出部可从第二突出部或其它结构延伸,以接触牙齿表面。在某些情况下,突出部同样可从牙齿表面伸出,例如位于矫治器的外表面上的突出部。如需要的话,可制造具有较小曲率半径的其它结构,该曲率半径小于20%、小于10%、甚至小于5%的材料的厚度,从而使矫治器材料能够扩展到之前不可及的牙医领域。虽然结构1400被示为凸形结构,但应理解的是,类似的凹形结构可被制造为具有小于其相应厚度的30%、小于20%、小于10%、甚至小于5%的曲率半径,从而使牙齿接纳腔能够包括甚至对例如尖锐的牙科结构的紧密包围。
223.由直接制造所提供的改进的极限值(关于厚度和曲率半径)允许制造具有紧密地匹配患者牙齿表面的矫治器,从而改善了所述表面的接合。例如,接合表面(例如,邻间接合表面、牙齿接纳腔或咬合面)可被制造成具有匹配待接合的牙齿的表面的不规则形状。例如,可通过制造具有解析度为100微米或更高的相应的不规则形状(例如,突出部和凹陷部)的相应接合表面来匹配100微米或更小的不规则形状。这样的不规则形状具有相对小的曲率半径。现有的聚合物矫治器在这方面具有局限性,因为这样的小结构需要成比例的薄材料(其具有较低承载能力)。相较之下,本文公开的方法和矫治器允许制造这样的结构并且不受设置这种结构的材料的厚度约束。
224.本文公开的每个结构(包括图1、图2以及图5
‑
图14所示的结构)均能以合并、独立或组合的方式运用于诸如聚合物壳式矫治器等矫治器中。本文公开的邻间接合结构特别可由聚合物材料制成并作为这种矫治器的一部分。这样的矫治器可使用本文公开的直接制造技术(例如增材制造等)来制造。
225.尽管本文已经示出和描述了本发明的优选实施例,但是对于本领域普通技术人员来说显而易见的是,这样的实施例仅作为示例而被提供。本领域普通技术人员目前在不脱离本发明的情况下会构想到许多变型、更改和替代方案。应理解的是,本文所述的发明的实施例的各种替代方案可在实施本发明时使用。随附的权利要求书旨在限定本发明的范围,并因此覆盖落入这些权利要求范围内的方法和结构及其等同物。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1