一种放射科用站、卧两用脊柱扫描辅助装置
1.本实用新型涉及医疗设备辅助工装技术领域,具体涉及一种放射科用站、卧两用脊柱扫描辅助装置。
背景技术:
2.脊柱是身体的支柱,位于背部正中,上端接颅骨,下端达尾骨尖;脊柱为人体的中轴骨骼,是身体的支柱,有负重、减震、保护和运动等功能。脊柱作为人体重要的组成部分,一旦脊柱出现病变将会导致患者行走不便、失去平衡。腰酸背痛、产生疲劳,个别严重的将会影响到患者的呼吸器官和内脏的发育,因此脊柱出现病变及时治疗和矫正至关重要,脊柱校正手术属于脊柱领域的高难度手术,所以手术前的评估规划就更显关键。其中,脊柱评估的一种手段就是通过x射线对脊柱进行扫描。
3.目前,主要通过x射线摄影设备对人体进行扫描,扫描过程中,将患者的脊柱病变部分和摄影设备相对应,确保拍出的图像更为清晰,以便医护人员对病情更好的判断,因此,设计一种能够及时调整患者距离地面的装置显得至关重要,通过将患者移动到与摄影设备相对应位置,并对脊柱病变部位进行正位照射;另一方面,根据患者脊柱病变严重程度,设计一种能够同时保证患者站、卧两种方式的辅助摄影设备对人体进行照射的装置显得至关重要。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提供放射科用站、卧两用脊柱扫描辅助装置,通过设置扶手、侧翼,有效解决患者脊柱病变位置不能与摄影装置及时对应、且不能根据患者病情严重程度提供站、卧两种承载方式的难题。
5.本实用新型公开了一种放射科用站、卧两用脊柱扫描辅助装置,包括底架,底架下方设置有万向轮,底架上固定有背板,且底架的上方设置有踏板;底架上安装有用于升、降踏板的执行机构,背板上设置有通过驱动源调节高度的扶手。
6.在具体设置上述驱动源时,驱动源具有两种实施(实现)方式,第一种:驱动源包括螺纹轴,扶手上设置有用于和螺纹轴相匹配的螺纹孔;螺纹轴的一端与背板转接,螺纹轴的另一端与马达连接。第二种:驱动源包括电动伸缩缸,电动伸缩缸的缸身固定于背板上,且电动伸缩缸的伸缩轴与扶手固定。
7.在具体设置上述执行机构时,执行机构包括皮带,踏板上配置有两个以上的螺纹孔,螺杆穿过螺纹孔与底架固定;相邻两螺杆通过皮带传动连接,首尾两螺杆无皮带连接,其中一螺杆上传动连接有电机。
8.在具体设置上述扶手时,扶手的升降部端缘上开设有用于容纳扶手扶持部的空腔,扶手的扶持部可在空腔内滑动。
9.在具体设置上述背板、扶手时,扶手靠近背板的侧面上安装有滚轮,且滚轮与槽道滑动适配。
10.在具体设置上述踏板时,踏板上铰接有一块以上的侧翼,在侧翼的下方安装有可对侧翼进行支撑的折叠结构。
11.在具体设置上述折叠结构时,折叠结构包括两支臂,两支臂中心通过销轴铰接,形成“剪刀”结构;“剪刀”结构的一顶部端缘与侧翼的底部铰接,另一顶部端缘与侧翼的底部滑动连接;其中一支臂上铰接有双向电动推杆,双向电动推杆的两伸缩杆分别与两支臂铰接。
12.在具体设置上述背板时,背板上固定有顶架,顶架表面向外延伸有和螺杆相同数量的凸缘,且凸缘和螺杆的自由端固定。
13.本实用新型的有益效果在于以下几点:
14.第一,本技术的使用方法:第一,首先,将本技术推动摄影架前,患者站上踏板并背靠背板,通过执行机构将踏板、患者移动到和摄影架上照射部位相对应的位置;其次,通过驱动源将扶手进行升降。第二,首先,将侧翼翻转到与踏板齐平,患者以卧姿躺于踏板、侧翼组成的平面结构上,同样通过执行机构将踏板、侧翼、患者移动到和摄影架上照射部位相对应的位置;其次,通过执行机构调整患者的升降时,相应通过折叠结构对侧翼进行支撑。
15.第二,本技术通过将扶手可调节的设置于背板上,可以根据患者的身高及时调整扶手的位置,有效提高患者在被扫描时的舒适度、以及增强对患者的支撑力度;另一方面,本技术通过结合侧翼和折叠结构,可以通过翻转侧翼的方式对踏板的面积大小进行改变,脊柱病变严重的患者需要平躺,此时需要将侧翼转动到与踏板齐平,踏板的俯视面积增大,确保踏板、侧翼共同组成的平面结构能够提供足够大的平面,以便将患者身躯进行有效承载;当患者的脊柱病变较轻,只需使用踏板即可。通过站、卧两种方式进一步提高了本技术的实用性和适用性。
附图说明
16.图1a为本实用新型的第一角度侧面结构示意图。
17.图1b为本实用新型的第二角度侧面结构示意图。
18.图1c为执行机构驱动螺杆的结构示意图。
19.图2为扶手安装于背板的安装结构示意图。
20.图3为扶手设置为可调节后的结构示意图。
21.图4为驱动源的第一种实施方式的结构示意图。
22.图5为驱动源的第二种实施方式的结构示意图。
23.图6为滚轮在槽道中运动的结构示意图。
24.图7为侧翼和踏板的装配结构示意图。
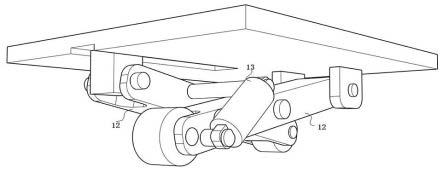
25.图8为折叠结构的安装结构示意图。
26.图9为顶架的结构示意图。
27.图10为本实用新型在使用时的结构示意图。
28.图中,底架1、万向轮2、背板3、踏板4、螺杆5、皮带6、扶手7、升降部7.1、扶持部7.2、螺纹轴8、电动伸缩缸9、滚轮10、侧翼11、支臂12、双向电动推杆13、顶架14。
具体实施方式
29.为了清楚的理解本技术技术方案,下面将结合具体实施例和附图对本技术提供的一种放射科用站、卧两用脊柱扫描辅助装置进行详细说明。
30.以下实施例中所使用的术语只是为了描述特定实施例的目的,而并非旨在作为对本技术的限制。如在本技术的说明书和所附权利要求书中所使用的那样,单数表达形式“一个”、“一种”、“上述”、“该”和“这一”旨在也包括例如“一个或多个”这种表达形式,除非其上下文中明确地有相反指示。还应当理解,在本技术以下各实施例中,“至少一个”、“一个或多个”是指一个、两个或两个以上。
31.在本说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“一个实施例”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
32.实施例1
33.参考图1a至图1c,示意本技术中放射科用站、卧两用脊柱扫描辅助装置,包括底架1,底架1下方设置有三个以上的万向轮2(万向轮2上配置有可将万向轮2进行锁定的刹车结构,本实施例中,万向轮2采用型号ts-wxl-1zz5d),当本实施例中的整体结构需要移动到指定位置时,通过万向轮2可使本实施例中的整体结构发生位置改变、动作锁止;底架1上焊接有背板3,脊柱无明显变形的患者进行脊柱x射线扫描时,要求患者紧靠背板3,自然站立,头略抬高,通过背板3设置可确保患者站立时不会出现抖动现象,进而提高x射线扫描图像的清晰度,甚至通过背板3为脊柱出现病变的患者站立提供支撑,在一定程度上缓解了患者的疲劳。底架1的上方设置有踏板4,踏板4上配置有两个以上的螺纹孔(本实施例中螺纹孔设置为4个),且螺纹孔容纳或者供螺杆5穿过,螺杆5竖直焊接于踏板4上,本实施例中4个螺杆5同步正、反转时,踏板4在螺纹孔的转向驱动和4个螺杆5的多点限位进行升降动作,同时,底架1上安装有用于同步驱动4个螺杆5进行转动的执行机构,如图1c,执行机构包括皮带6,相邻两螺杆5通过皮带6传动连接,且为节省成本,减少皮带6的数量使用,首尾两螺杆5无皮带6连接,其中一螺杆5上传动连接有电机,电机固定于底架1上,电机启动,在皮带6的传动作用下,带动各螺杆5实现同步转动。针对上述患者站立较为困难的难题(主要防止患者身体出现向两侧跌倒的风险),如图2,背板3上设置有两扶手7,考虑到患者的身高略有差异,因此,背板3的两旁侧配置有可容纳扶手7的竖向槽道,且扶手7沿槽道可滑动,患者可以根据自己的身高随意调节扶手7的位置,直到患者能够以最舒服的姿势靠扶在扶手7上。扶手7的升降需要有驱动源进行推动,本实施例中为了增强本技术的多样性,驱动源有两种实现(实施)方式。第一种:参考图4,驱动源包括螺纹轴8,扶手7侧缘向外侧延伸有凸缘,凸缘上形成有用于和螺纹轴8相匹配的螺纹孔;螺纹轴8穿过凸缘上螺纹孔,且螺纹轴8的一端缘与背板3延伸出的挡板转接,螺纹轴8的另一端通过联轴器与马达动力轴连接,螺纹轴8在马达驱动作用下实现转动,进而扶手7在螺纹轴8和背板3的共同限制作用下实现升降动作。第二种:参考图5,驱动源包括电动伸缩缸9,电动伸缩缸9的缸身栓接于背板3上,且电动伸缩缸9的伸缩轴与扶手7的侧缘焊接,通过控制电动伸缩缸9的伸缩轴伸缩量,进而推动扶手7在背
板3上实现移动。无论上述那种实现方式,它们最终实现的共同效果就是能够保证扶手7在背板3上实现可调节,充分适应不同身高的患者,保证患者在使用过程中的舒适性。
34.实施例2
35.为避免肱骨、肩挡住胸椎,患者在检测时需要保证双臂伸展,作为本实施例的优化,扶手7的扶持部7.2和升降部7.1设置为可伸缩调节,如图3,扶手7的升降部7.1端缘上开设有用于容纳扶手7扶持部7.2的空腔,扶手7的扶持部7.2可在空腔内滑动,患者可以根据自己的臂展将扶手7的扶持部7.2移动到空腔的合适位置,增强了本技术的实用性。
36.实施例3
37.考虑到扶手7在背板3上移动的过程中,可能由于摩擦力等因数导致扶手7在背板3上移动不够顺畅,基于此,扶手7靠近背板3的侧面上安装有滚轮10,且滚轮10与槽道滑动适配,槽道相当于限制滚轮10发生横向偏移的轨道,滚轮10在槽道中运动的示意图参考图6。
38.实施例4
39.在将本技术的实施例1至实施例3现场实践(使用)过程中,患者和医护人员发现上述实施例应用的场景通常为脊柱变形不是太严重的情况下,一旦患者的脊柱变形严重,患者在通常情况下是很难进行站立的,只能使患者保持平躺(卧姿)然后进行x射线扫描,基于此,如图7,踏板4的周侧面上铰接有侧翼11,侧翼11的数量视具体情况而定,本实施例中侧翼11的数量为两块,脊柱病变严重的患者需要平躺,此时需要将侧翼11转动到与踏板4齐平,踏板4的俯视面积增大,确保踏板4、侧翼11共同组成的平面结构能够提供足够大的平面,以便将患者身躯进行有效承载;当患者使用完毕后,将侧翼11翻转折叠,避免侧翼11不使用时出现占用空间的弊端,侧翼11翻转折叠后,若不及时将侧翼11进行锁定将会造成侧翼11翻转到原位,可以将侧翼11和踏板4进行可拆装连接,具体的,可拆装的方式可以为绳索绑接、销轴插接等(绳索、销轴均为市面上常规产品,图中不再示出)。考虑到侧翼11展开到踏板4一侧后,由于侧翼11的底部缺少支撑力,当患者平躺到侧翼11上方时,很容易造成侧翼11的折断,考虑到上述因数,在侧翼11的下方安装有折叠结构,如图8所示,折叠结构包括两支臂12,两支臂12中心通过销轴铰接,形成“剪刀”结构;“剪刀”结构的一顶部端缘与侧翼11的底部铰接,另一顶部端缘与侧翼11的底部滑动连接;其中一支臂12上铰接(第一铰接点)有双向电动推杆13(型号:ynt-03-010),双向电动推杆13的两伸缩杆分别与两支臂12铰接(第二铰接点、第三铰接点)。当侧翼11和踏板4齐平后,启动双向电动推杆13,双向电动推杆13的两伸缩杆向外伸出,双向电动推杆13在第一铰接点、第二铰接点、第三铰接点的共同限制作用下,带动“剪刀”结构实现剪切运动,保证“剪刀”结构由折叠状态向伸展状态转变过程中和地面进行接触,最终通过折叠结构实现对侧翼11的支撑。
40.实施例5
41.考虑到背板3和螺杆5安装时的稳固性,如图9所示,背板3上焊接有顶架14,顶架14表面向外延伸有和螺杆5相同数量的凸缘,且凸缘和螺杆5的自由端焊接,避免背板3被患者靠压时出现挤压变形。
42.通过图10示出了本技术的整体结构示意图,本技术具有两种使用方法:方法一(患者的脊柱变形不严重):首先,将本技术推动摄影架前,患者站上踏板4并背靠背板3,通过执行机构将踏板4、患者移动到和摄影架上照射部位相对应的位置;其次,通过驱动源将扶手7进行升降(根据不同身高的患者,需要将扶手7升降到不同的位置,根据实际情况而定)。方
法二(患者的脊柱变形严重):首先,将侧翼11翻转到与踏板4齐平,患者以卧姿躺于踏板4、侧翼11组成的平面结构上,同样通过执行机构将踏板4、侧翼11、患者移动到和摄影架上照射部位相对应的位置;其次,通过执行机构调整患者的升降时,相应通过折叠结构对侧翼11进行支撑。
43.值得注意的是,本实施例中所涉及到的电器设备与发电装置、控制器电连接,发电装置、控制器均为市面上常见的现有技术,此处不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1