一种自整理机器人的制作方法
[0001]
一种自整理机器人,本实用新型属于智能生活电器技术领域,具体涉及一种整理家务的机器人。
背景技术:
[0002]
随着现在的互联网技术不断地提高,在家居环境中增添智能化家居设备变得日趋常规化,目前市面上的智能家居产品大多在于为家居环境中的部分机械化环节提供服务,如:扫地机器人、电动窗帘、家居智能唤醒等等产品。
[0003]
申请号cn201920310799.2,公开了一种扫地机器人的滚刷上盖及扫地机器人,所述扫地机器人的滚刷上盖包括盖本体、插装于扫地机器人壳体的安装部、将所述安装部锁止在所述扫地机器人壳体上的锁扣、解除所述锁扣的锁止功能的释放按键和将所述盖本体弹出所述扫地机器人壳体的弹出部件;所述盖本体和所述安装部固定在一起,所述盖本体和所述安装部能整体相对于所述扫地机器人壳体移动;所述弹出部件的一端抵靠在所述扫地机器人壳体上,另一端抵靠所述安装部,所述锁扣处于锁止状态时,所述弹出部件处于蓄能状态。本实用新型的扫地机器人的滚刷上盖及扫地机器人,能简单、快速地更换滚刷。
[0004]
申请号cn201910265905.4,公开了一种儿童机器人学习玩具,包括机身和机头,所述胳膊远离机身的一端通过螺栓固定安装有手掌部,所述手掌部正面的中心处镶嵌有语音播放器,所述机身正面的中心处镶嵌有写字板,所述机身顶部的中心处通过螺栓固定安装有转轴,所述机头底部的中心处通过螺栓固定安装有轴套,所述轴套套接在转轴顶部,所述轴套与转轴转动连接,所述机头正面的中心处镶嵌有显示屏,此儿童机器人学习玩具通过显示屏展示儿童学习内容,同时通过语音播放器将展示内容对应的信息通过声音的形式播放出来,然后儿童根据在显示屏上看到的信息用笔在写字板上书写,这样能够同时调动儿童的手、耳、眼和脑,加强了儿童的学习效果。
[0005]
上述智能机器人虽然能实现特定的一些功能,如扫地,供儿童学习,人机对话等,但目前城市生活中的年轻人工作繁重,回到家时已经很累了,好多年轻人不愿意整理家务,导致居家环境很乱,上述机器人还是不够实用。
技术实现要素:
[0006]
本实用新型的目的在于:提供一种自整理机器人,以解决城市生活中年轻人由于上班辛苦而不愿整理家务的问题。
[0007]
本实用新型采用的技术方案如下:
[0008]
一种自整理机器人,包括运动基座机构,所述运动基座机构的上部设置有至少四根立杆,所述立杆的上部设置有上基座平台,所述上基座平台上设置有滑动机构,所述滑动机构上设置有夹臂基座,所述夹臂基座上设置有反向倒l型的夹臂杆,所述夹臂杆上设置有夹取机构。
[0009]
工作过程:通过运动基座机构的设置能在水平任意方向运动,滑动机构及夹臂基
座的设置使夹取机构能在水平方向上来回移动,夹取机构还可以上下移动,使机器人有超过3个自由度的工作范围,可以自主夹取放置各类物品,实现整理家务的功能。
[0010]
优选的,所述夹取机构的下方设置有托载转向机构。用于运载部分较重物品。
[0011]
更为优选的,所述托载转向机构包括位于夹取机构下方的托载平台,位于所述托载平台下部的转向轮,位于所述托载平台上部的两根竖杆,位于每根所述竖杆顶部水平设置的导杆及位于所述下基座平台上的转向齿轮及位于所述下基座平台上并驱动所述转向齿轮转动的第三电机,每根所述导杆均与所述转向齿轮的齿轮轴相连。第三电机驱动转向齿轮转动,转向齿轮带动齿轮轴及导杆、竖杆和托载平台转动,转向轮跟随托载平台一起转动,同时转向轮外侧的与其铰接的转向轮座对托载平台起支撑作用。
[0012]
优选的,所述滑动机构包括位于所述上基座平台上方的两根固定在固定座上的丝杆,位于所述两根丝杆之间的一根固定在轴承套上的螺杆,位于所述螺杆一端的第二电机,位于所述丝杆上方的滑动平台,位于所述滑动平台下部且与所述丝杆滑动连接的滑套及位于所述滑动平台的下部且所述螺杆相啮合的环套。第二电机驱动螺杆转动,螺杆转动带动环套及固定在环套上的滑动平台移动,之后第二电机反转,带动滑动平台向反向移动,两根丝杆及滑套对滑动平台起导向作用,使其始终保持平稳。
[0013]
优选的,所述夹取机构包括位于所述夹臂杆端部的直齿夹套,位于所述直齿夹套外侧的带齿电机,位于所述直齿夹套内的活动的直齿杆及位于所述直齿杆下部的机械手,所述直齿杆上的直齿与所述带齿电机相啮合。带齿电机运行,带动直齿在直齿夹套内移动,从而带动机械手移动,带齿电机反向运行,带动直齿在直齿夹套内反向移动,从而带动机械手向相反的方向移动,即带动机械手上移或下移实现夹取或放置物品。
[0014]
优选的,所述运动基座机构包括下基座平台,位于所述下基座平台下部的四个轮子及驱动所述轮子运动的驱动机构。驱动机构驱动下基座平台在水平面内任意方向移动。
[0015]
优选的,所述驱动机构包括位于所述下基座平台上的第一电机,与所述第一电机相连的主动齿轮,位于所述轮子之间的连接轴上的从动齿轮及位于所述主动齿轮与所述从动齿轮上的齿轮带。第一电机驱动主动齿轮转动,主动齿轮转动带动齿轮带转动,从而带动从动齿轮及后方的两个轮子转动,利用链条传动原理运动。
[0016]
一种自整理机器人的控制方法,包括如下步骤:
[0017]
(1)在自整理机器人进入工作环境中第一次开机时,先进行自检查,之后对居家环境进行检测,向自整理机器人中录入工作路线并保存;
[0018]
(2)物品识别和录入,通过传感器和摄像头对物品的特征进行扫描拍照,之后录入本地物品库中,通过相似物品的大小、颜色、常用位置等对相似物品进行简单物理区分,如大小剪刀、红黑色笔、主卧的袜子和次卧的袜子都会在物品库中有不同的定义;
[0019]
(3)机器人的常规工作可以由使用者设定工作时间,一班默认在工作日的上午10:00-12:00,下午14:30-16:30,周末的夜间00:01开始工作,常规工作时,会按照本地路线在室内进行巡航检测,对物品库内的物品进行全面扫描检查,对其位置错误的物品进行归置操作,将所有位置错误的物品的归置操作结束后,机器人会返回原定位置进入待机状态,等待;
[0020]
(4)机器人也可以在人员在家时进行配合使用者的协助工作,可以用语音操作或者是指令操作让机器人进行配合,在机器人接收到使用者的操作指令之后,机器人便在物
品库内搜索指令所需的物品,按本地路线行进,然后通过电机的驱动使夹取机构对物品进行存取操作,然后送至使用者手中或者送回至存放处,至此为完成一次指令操作,等待使用者的下一次操作指令,长时间内无新指令时,则返回原定位置进入待机状态,等待下一次的工作时间或者人工唤醒再进行下一次的工作。
[0021]
优选的,机器人在启动后会开始工作,通过机器人自带的摄像头和传感器规避室内的墙壁和家居等障碍物,在行进过程中记录前进的距离和转向等信息,通过多次的路径重复以此获得机器人的二维工作路线。
[0022]
优选的,更换家具摆放或更换房屋导致路线变化时,人工导入更新后的路线。
[0023]
优选的,对于一些机器无法轻易识别的物品列入未知物品栏中,提醒使用者对其进行人工录入,具体为,添置的新物品可以放置在载物台上,点按添置按钮即可使机器人对载物台的物品进行特征录入至物品库内。
[0024]
优选的,无法轻易识别的物品是指原始物品预设列表未能列出的物品,如某些新面世的物品;比如一些类似物品,诸如老虎钳和核桃夹、工具箱和医药箱、笔记本和平板电脑等等类似物品或仅仅通过照片机器无法识别的物品。
[0025]
优选的,通过双击“ok”键即可呼出菜单栏,通过方向键选中物品库,使用者可以根据使用习惯对物品库中的物品名称进行更改,以更好的适配语音操作。
[0026]
优选的,通过选中未知物品栏,对物质物品进行命名,使得机器人可以对更多的物品进行整理。
[0027]
优选的,通过选中本地路线和家居环境栏,可以点选机器人拍摄的家居环境中的储藏式储物空间,并对其进行编号或者命名处理(诸如:电视柜1号抽屉、衣柜2号门、鞋柜3号门等等),得益于机器人的机械手可以对绝大多数的抽屉和柜门进行开合工作,机器人在获取到新的储物空间后会进行工作环境更新,进行更多的整理工作。
[0028]
优选的,通过在本地路线中进行位置点选,设置待清洗衣物的放置位置,机器人根据摄像头的拍摄和传感器的信号进行工作,只针对该位置衣物进行送洗操作,以避免机器人误洗。
[0029]
一种自整理机器人的控制装置,包括:
[0030]
第一信号检测模块,用于检测机器人的工作位置信号,以实时反馈给控制模块确定行进位置;
[0031]
第二信号检测模块,用于检测机器人的机械手位置信号,以实时反馈给控制模块确定机械手与物品的距离;
[0032]
第一图像检测模块,用于获取物品特征信号和机械手位置信号,以实时反馈给控制模块确定机械手的工作状态;
[0033]
第二图像检测模块,用于获取机器人行进环境图像信号,以实时反馈给控制模块确定机器人行进方向;
[0034]
操作控制模块,用以控制机器人机械手的姿态改变;
[0035]
辅助操作控制模块,用以控制机器人机械手工作所需要的空间位置;
[0036]
运动控制模块,用以控制机器人工作时的路线行进和方向变化;
[0037]
人机界面,通过人机界面输入信号完成对机器人的人工控制;
[0038]
控制模块通过第一信号检测模块、第二信号检测模块、第一图像检测模块和第二
图像检测模块所获取的信号按照预设模式来完成机器人的信息录入工作,其中,控制模块通过所获取的信号来完成路线图、物品库和环境信息的存储;
[0039]
运动控制模块,由控制模块控制其电机运转来带动机器人的行进以及转向;
[0040]
操作控制模块和辅助操作控制模块,由控制模块通过第二信号检测模块和第一图像检测模块所获取的信号来控制其电机的运转来改变机器人机械手的空间位置和机械手姿态;
[0041]
人机控制界面,通过人工操作对机器人输入指令,由控制模块控制机器人完成任务。
[0042]
优选的,预设模式包括第一预设模式:工作路线的录入,由第一信号检测模块和第二图像检测模块的信号来确定机器人的可行进路线和方向,通过多次的重复来完成机器人对二维工作路线的生成;第二预设模式:物品信息的录入,由第二信号检测模块和第一图像检测模块的信号来获取拍摄物品的照片信息以及机械手的位置信号,将信号组合存入系统,完成物品的命名和位置信号的生成;第三预设模式:环境信息的录入,由第一图像检测模块和第二图像检测模块的信号来获取室内的墙体位置信息和存储空间位置信息,以此完成机器人的工作环境信息的录入。
[0043]
综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
[0044]
1、本实用新型中,机器人带有机器夹臂,有超过3个自由度的工作范围,可以自主夹取放置各类物品,机器人还有放置平台用于运载部分较重物品;
[0045]
2、机器人通过多次记忆取放物品的位置来记忆人们的日常生活摆放习惯,借助图像识别技术来对家中物品进行识别记忆,对于无法识别的物品进行拍照,通过使用者的语音辅助来对未识别物品记忆;
[0046]
3、在记住家中物品之后,机器人的主要工作时间是在夜间和使用者上班或者不在家的时候,在室内无人时,按照本地路线图进行巡视,然后依据顺序对家中凌乱物品进行摆放,收取换洗衣物并投入洗衣机洗涤、晾晒等等任务,在家中有人存在时则依据语音唤醒和指令进行工作,配合使用者进行各种生产生活等各种事宜;
[0047]
4、给家庭生活中增添一个不添乱的助手。
附图说明
[0048]
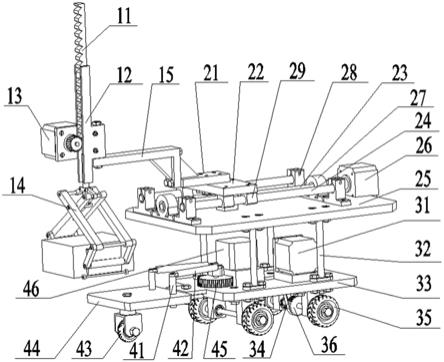
图1为本实用新型一种自整理机器人的结构示意图;
[0049]
图2为本实用新型一种自整理机器人的控制方法的流程图;
[0050]
图3为本实用新型一种自整理机器人的控制装置的方框图。
[0051]
图中标记:11-直齿杆,12-直齿夹套,13-带齿电机,14-机械手,15-夹臂杆,21-夹臂基座,22-滑动平台,23-螺杆,24-丝杆,25-上基座平台,26-第二电机,27-轴承套,28-固定座,29-滑套,31-第一电机,32-立杆,33-下基座平台,34-齿轮带,35-轮子,36-从动齿轮,41-竖杆,42-导杆,43-转向轮,44-托载平台,45-转向齿轮,46-第三电机。
具体实施方式
[0052]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本
实用新型,并不用于限定本实用新型。
[0053]
实施例1
[0054]
如图1所示,一种自整理机器人,包括运动基座机构,所述运动基座机构的上部设置有至少四根立杆32,所述立杆32的上部设置有上基座平台25,所述上基座平台25上设置有滑动机构,所述滑动机构上设置有夹臂基座21,所述夹臂基座21上设置有反向倒l型的夹臂杆15,所述夹臂杆15上设置有夹取机构。本申请的技术方案中:自整理机器人带有机器夹臂,有超过3个自由度的工作范围,可以自主夹取放置各类物品。
[0055]
工作过程:通过运动基座机构的设置能在水平任意方向运动,滑动机构及夹臂基座21的设置使夹取机构能在水平方向上来回移动,夹取机构还可以上下移动,使机器人有超过3个自由度的工作范围,可以自主夹取放置各类物品,实现整理家务的功能。
[0056]
实施例2
[0057]
如图1所示,在实施例1的基础上,所述夹取机构的下方设置有托载转向机构。用于运载部分较重物品。
[0058]
实施例3
[0059]
如图1所示,在实施例2的基础上,所述托载转向机构包括位于夹取机构下方的托载平台44,位于所述托载平台44下部的转向轮43,位于所述托载平台44上部的两根竖杆41,位于每根所述竖杆41顶部水平设置的导杆42及位于所述下基座平台33上的转向齿轮45及位于所述下基座平台33上并驱动所述转向齿轮45转动的第三电机46,每根所述导杆42均与所述转向齿轮45的齿轮轴相连。第三电机46驱动转向齿轮45转动,转向齿轮45带34动齿轮轴及导杆42、竖杆41和托载平台44转动,转向轮43跟随托载平台44一起转动,同时转向轮43外侧的与其铰接的转向轮43座对托载平台44起支撑作用。
[0060]
实施例4
[0061]
如图1所示,在实施例1的基础上,所述滑动机构包括位于所述上基座平台25上方的两根固定在固定座28上的丝杆24,位于所述两根丝杆24之间的一根固定在轴承套27上的螺杆23,位于所述螺杆23一端的第二电机26,位于所述丝杆24上方的滑动平台22,位于所述滑动平台22下部且与所述丝杆24滑动连接的滑套29及位于所述滑动平台22的下部且所述螺杆23相啮合的环套。第二电机26驱动螺杆23转动,螺杆23转动带动环套及固定在环套上的滑动平台22移动,之后第二电机26反转,带动滑动平台22向反向移动,两根丝杆24及滑套29对滑动平台22起导向作用,使其始终保持平稳。
[0062]
实施例5
[0063]
如图1所示,在实施例1的基础上,所述夹取机构包括位于所述夹臂杆15端部的直齿夹套12,位于所述直齿夹套12外侧的带齿电机13,位于所述直齿夹套12内的活动的直齿杆11及位于所述直齿杆11下部的机械手14,所述直齿杆11上的直齿与所述带齿电机13相啮合。带齿电机13运行,带动直齿在直齿夹套12内移动,从而带动机械手14移动,带齿电机13反向运行,带动直齿在直齿夹套12内反向移动,从而带动机械手14向相反的方向移动,即带动机械手14上移或下移实现夹取或放置物品。
[0064]
实施例6
[0065]
如图1所示,在实施例1的基础上,所述运动基座机构包括下基座平台33,位于所述下基座平台33下部的四个轮子35及驱动所述轮子35运动的驱动机构。驱动机构驱动下基座
平台33在水平面内任意方向移动。
[0066]
实施例7
[0067]
如图1所示,在实施例6的基础上,所述驱动机构包括位于所述下基座平台33上的第一电机31,与所述第一电机31相连的主动齿轮,位于所述轮子35之间的连接轴上的从动齿轮36及位于所述主动齿轮与所述从动齿轮36上的齿轮带34。第一电机31驱动主动齿轮转动,主动齿轮转动带动齿轮带34转动,从而带动从动齿轮36及后方的两个轮子35转动,利用链条传动原理运动。
[0068]
实施例8
[0069]
一种自整理机器人的控制方法,包括如下步骤:
[0070]
(1)在自整理机器人进入工作环境中第一次开机时,先进行自检查,之后对居家环境进行检测,向自整理机器人中录入工作路线并保存;
[0071]
(2)物品识别和录入,通过传感器和摄像头对物品的特征进行扫描拍照,之后录入本地物品库中,通过相似物品的大小、颜色、常用位置等对相似物品进行简单物理区分,如大小剪刀、红黑色笔、主卧的袜子和次卧的袜子都会在物品库中有不同的定义;
[0072]
(3)机器人的常规工作可以由使用者设定工作时间,一班默认在工作日的上午10:00-12:00,下午14:30-16:30,周末的夜间00:01开始工作,常规工作时,会按照本地路线在室内进行巡航检测,对物品库内的物品进行全面扫描检查,对其位置错误的物品进行归置操作,将所有位置错误的物品的归置操作结束后,机器人会返回原定位置进入待机状态,等待;
[0073]
(4)机器人也可以在人员在家时进行配合使用者的协助工作,可以用语音操作或者是指令操作让机器人进行配合,在机器人接收到使用者的操作指令之后,机器人便在物品库内搜索指令所需的物品,按本地路线行进,然后通过电机的驱动使夹取机构对物品进行存取操作,然后送至使用者手中或者送回至存放处,至此为完成一次指令操作,等待使用者的下一次操作指令,长时间内无新指令时,则返回原定位置进入待机状态,等待下一次的工作时间或者人工唤醒再进行下一次的工作。
[0074]
优选的,机器人在启动后会开始工作,通过机器人自带的摄像头和传感器规避室内的墙壁和家居等障碍物,在行进过程中记录前进的距离和转向等信息,通过多次的路径重复以此获得机器人的二维工作路线。
[0075]
优选的,更换家具摆放或更换房屋导致路线变化时,人工导入更新后的路线。
[0076]
优选的,对于一些机器无法轻易识别的物品列入未知物品栏中,提醒使用者对其进行人工录入,具体为,添置的新物品可以放置在载物台上,点按添置按钮即可使机器人对载物台的物品进行特征录入至物品库内。
[0077]
优选的,无法轻易识别的物品是指原始物品预设列表未能列出的物品,如某些新面世的物品;比如一些类似物品,诸如老虎钳和核桃夹、工具箱和医药箱、笔记本和平板电脑等等类似物品或仅仅通过照片机器无法识别的物品。
[0078]
优选的,通过双击“ok”键即可呼出菜单栏,通过方向键选中物品库,使用者可以根据使用习惯对物品库中的物品名称进行更改,以更好的适配语音操作。
[0079]
优选的,通过选中未知物品栏,对物质物品进行命名,使得机器人可以对更多的物品进行整理。
[0080]
优选的,通过选中本地路线和家居环境栏,可以点选机器人拍摄的家居环境中的储藏式储物空间,并对其进行编号或者命名处理(诸如:电视柜1号抽屉、衣柜2号门、鞋柜3号门等等),得益于机器人的机械手可以对绝大多数的抽屉和柜门进行开合工作,机器人在获取到新的储物空间后会进行工作环境更新,进行更多的整理工作。
[0081]
优选的,通过在本地路线中进行位置点选,设置待清洗衣物的放置位置,机器人根据摄像头的拍摄和传感器的信号进行工作,只针对该位置衣物进行送洗操作,以避免机器人误洗。
[0082]
实施例9
[0083]
一种自整理机器人的控制装置,包括:
[0084]
第一信号检测模块,用于检测机器人的工作位置信号,以实时反馈给控制模块确定行进位置;
[0085]
第二信号检测模块,用于检测机器人的机械手位置信号,以实时反馈给控制模块确定机械手与物品的距离;
[0086]
第一图像检测模块,用于获取物品特征信号和机械手位置信号,以实时反馈给控制模块确定机械手的工作状态;
[0087]
第二图像检测模块,用于获取机器人行进环境图像信号,以实时反馈给控制模块确定机器人行进方向;
[0088]
操作控制模块,用以控制机器人机械手的姿态改变;
[0089]
辅助操作控制模块,用以控制机器人机械手工作所需要的空间位置;
[0090]
运动控制模块,用以控制机器人工作时的路线行进和方向变化;
[0091]
人机界面,通过人机界面输入信号完成对机器人的人工控制;
[0092]
控制模块通过第一信号检测模块、第二信号检测模块、第一图像检测模块和第二图像检测模块所获取的信号按照预设模式来完成机器人的信息录入工作,其中,控制模块通过所获取的信号来完成路线图、物品库和环境信息的存储;
[0093]
运动控制模块,由控制模块控制其电机运转来带动机器人的行进以及转向;
[0094]
操作控制模块和辅助操作控制模块,由控制模块通过第二信号检测模块和第一图像检测模块所获取的信号来控制其电机的运转来改变机器人机械手的空间位置和机械手姿态;
[0095]
人机控制界面,通过人工操作对机器人输入指令,由控制模块控制机器人完成任务。
[0096]
优选的,预设模式包括第一预设模式:工作路线的录入,由第一信号检测模块和第二图像检测模块的信号来确定机器人的可行进路线和方向,通过多次的重复来完成机器人对二维工作路线的生成;第二预设模式:物品信息的录入,由第二信号检测模块和第一图像检测模块的信号来获取拍摄物品的照片信息以及机械手的位置信号,将信号组合存入系统,完成物品的命名和位置信号的生成;第三预设模式:环境信息的录入,由第一图像检测模块和第二图像检测模块的信号来获取室内的墙体位置信息和存储空间位置信息,以此完成机器人的工作环境信息的录入。
[0097]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型
的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1