一种实现无损抓取的气动软体机器人系统
1.本实用新型涉及机器人技术领域,尤其涉及一种实现无损抓取的气动软体机器人系统。
背景技术:
2.随着科学技术的发展,机器人技术逐渐融入我们的日常并得到广泛应用。传统的刚性机器人由于灵活性欠缺、环境适应性差,在某些特殊用途方面具有很大局限性。相较于传统的刚性机器人,软体机器人是与目标对象交互的新型执行部件,具有柔软、自由度大、易变形等优点,使其得以适应不同形状的对象,降低了损伤柔软易碎物体的可能性。受到全世界科研机构和学者们的广泛关注。
3.然而目前气动软体机器人在抓取物体时,缺乏有效的信息感知能力,极大限制了无损抓取时的效果。经文献检索发现,申请号为 201810679643.1的中国专利申请公开了一种安装多个压力传感器和弯曲传感器气动软体手指,该装置通过机器学习方法可以进行形状估计、抓持力反馈,进而控制抓持力的大小。申请号为201711432810.4 的中国专利申请公开了一种可自主均衡接触力的软体机器人,意在针对因五指力不均衡而导致物体破损的情况。但是上述装置仍存在一些不足,主要有以下缺陷:
4.(1)上述装置只能在软体机器人(手指)接触到物体后进行力的感知,进而控制抓持力的大小,而对接触前软体机器人(手指)的运动速度无法适宜控制,若运动速度过慢,则会影响抓取效率;若运动速度过快,将会在接触瞬间具有较大碰撞力,造成对易碎物体的损伤。
5.(2)上述装置安装过多传感器以实现形状估计、抓持力反馈,势必会对软体机器人(手指)的柔软性造成一定影响,在一定程度上制约了软体机器人(手指)本身特性。
6.(3)上述装置采用注塑法制作软体机器人,制作流程复杂,制备可重复性差,且混合后的材料刚度难以准确控制。
技术实现要素:
7.软体机器人(手指)的控制系统对于发挥软体机器人(手指)的优势是至关重要,但上述装置并未清晰明确的给出控制方案,增加了使用难度和不可靠性。针对上述技术问题,本实用新型的目的在于提供一种实现无损抓取的气动软体机器人系统。
8.一种实现无损抓取的气动软体机器人系统包括:气动软体机器人,所述气动软体机器人具有两根气动手指;其中,两个气动手指的结构与形状均相同,且相对设置,共用一个气压源,构成所述气动软体机器人的夹持部,用于夹取物体;
9.每根所述气动手指包括:腔体层、应变限制层和传感器层;气动手指的最外层至最内层依次为腔体层、应变限制层和传感器层;最内层的传感器层直接与被夹持物体接触;
10.所述腔体层包括多个气腔;多个气腔沿着所述应变限制层竖直均匀设置;多个气腔之间依靠一个气道相互连通;气体通过所述气道充入各气腔中,各气腔随着充入气体的
增多体积逐渐增大,相邻两个气腔之间由于体积增大产生挤压,使整个腔体层向所述气动手指的内侧弯曲;
11.所述应变限制层采用邵氏刚度65a的硅橡胶材料,其长度和宽度与腔体层长度、宽度相同;而所述腔体层采用邵氏刚度为50a的硅橡胶材料,当充气时,腔体层结构的气腔内壁发生膨胀产生较大变形,空腔之间互相挤压,而由于应变限制层(其材料比腔体层更厚也更硬一点)的弹性形变要小很多,因此能够限制整个气动柔性手指轴向变形,从而整个手指将向应变限制层一侧弯曲运动;
12.所述传感器层设有压力传感器和激光测距传感器;所述压力传感器用于测量气动手指最内层的传感器层与被夹持物体之间的压力;所述激光测距传感器用于测量气动手指最内层的传感器层与被夹持物体之间的距离。
13.进一步地,所述腔体层、应变限制层和传感器层通过硅橡胶粘在一起。
14.所述腔体层、应变限制层和传感器层均由3d打印制作。
15.进一步地,所述压力传感器采用柔性薄膜压力传感器,通过导线外接测量电路。
16.所述激光测距传感器采用基于柔性电路板的vl53l0芯片,采用柔性fpc排线作为导线连接测量电路。
17.进一步地,所述压力传感器与所述激光测距传感器均通过硅橡胶固定在传感器层上。
18.包括实现无损抓取的气动软体机器人的控制电路,所述控制电路包括:
19.24v电源、220v电源、5v电源、气泵、单片机、mos驱动电路、电磁比例调压阀、压力传感器、激光测距传感器和气动软体机器人;
20.24v电源连接电磁比例调压阀的电源输入端,220v电源连接气泵的输入端,气泵的输出端连接电磁比例调压阀的气压输入端,电磁比例调压阀的气压输出端连接气动软体机器人;5v电源分别连接单片机、压力传感器和激光测距传感器,所述压力传感器和激光测距传感器均通过硅胶粘于气动软体机器人上,单片机的输出端连接mos 驱动电路的输入端,mos驱动电路的输出端连接电磁比例调压阀的信号输入端。
21.一种实现无损抓取的气动软体机器人方法,用于所述的一种实现无损抓取的气动软体机器人系统,具体步骤包括:
22.s1、通电之后,电磁比例调压阀控制气压输出的大小,将输出的气压输给软体机器人,实现驱动软体机器人运动;
23.s2、激光测距传感器检测气动软体机器人与被抓物体之间的距离,并将所述距离发送至单片机;
24.s3、单片机将所测距离与距离阈值进行比较,若所测距离小于距离阈值,则执行步骤s5;否则执行步骤s4;
25.s4、以一定比例调节单片机的输出电压,并将所述输出电压通过 mos管放大电路输入到电磁比例调压阀中,并返回步骤s1;
26.s5、压力传感器检测气动软体机器人抓取部位的压力值并发送至单片机;
27.s6、单片机将所测压力值与抓取临界值进行比较,若所测压力值达到抓取临界值,则执行步骤s8;否则执行步骤s7;
28.s7、单片机控制程序发出充气指令至气泵,气泵对气动软体机器人充气,并返回步
骤s5;
29.s8、单片机控制程序发出保持此压力指令,控制气动软体机器人以所述压力完成抓取。
30.本实用新型的有益效果是:本实用新型设计一款实现无损抓取的气动软体机器人,并给出控制方案。本装置的优点在于设计了新颖的多腔体型气动软体机器人,其曲率均匀变化、应力集中减弱;制作过程采用先进的3d打印polyjet技术,与传统开模、注塑方法相比,通过该技术打印可以控制软体机器人的材料刚度,可靠性高,一体成型,便于重复制备。为了实现无损抓取,本装置安装激光测距传感器检测机器人与抓取物体之间距离远近,使得机器人运动速度与距离远近成一定比例,既能防止因抓取瞬间碰撞力过大而损坏柔软易碎物体,同时可以防止抓取过慢,兼具抓取效率;安装薄膜压力传感器测量接触力的大小,形成稳定的闭环控制,防止在抓取过程中损坏物体。最后本实用新型提出一套系统控制电路图和操作流程图,保证了系统的稳定可靠运行。本实用新型充分发挥了气动软体机器人柔软、自由度大、形状适应性好等优点,在细节处理方面非常到位,可以实现对柔软易碎物体的无损抓取。
附图说明
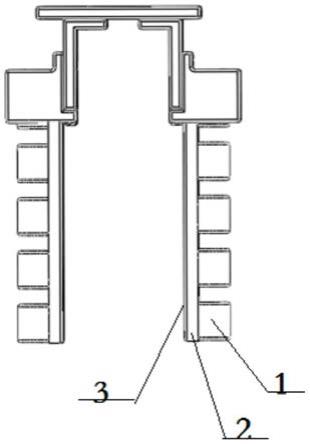
31.图1是本实用新型具体实施例实现无损抓取的气动软体机器人系统抓取示意图;
32.图2是本实用新型具体实施例腔体层正视图
33.图3是本实用新型具体实施例腔体层俯视图;
34.图4是本实用新型具体实施例腔体层的透视图;
35.图5是本实用新型具体实施例腔体层的弯曲示意图;
36.图6是本实用新型具体实施例传感器层的俯视图
37.图7是本实用新型具体实施例传感器层侧视图;
38.图8是本实用新型具体实施例传感器层下视图;
39.图9是本实用新型具体实施例实现无损抓取的气动软体机器人的控制电路;
40.图10是本实用新型具体实施例实现无损抓取的气动软体机器人方法流程图。
具体实施方式
41.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
42.以下结合具体实施例对本实用新型的具体实现进行详细描述:
43.请参考图1,图1是本实用新型具体实施例实现无损抓取的气动软体机器人系统抓取示意图;具体实施例一种实现无损抓取的气动软体机器人系统由两个(一对)机器人气动手指组成,类似于人的两个手指头,两个气动手指共用同一个压力源,同时从电磁比例调压阀输出端的通气管接收输出气压,因此两根手指就可以同时弯曲,进行物体夹取操作。下面就其中一根气动手指展开详细阐述。
44.每根气动手指分为三部分,分别是腔体层1、应变限制层2和传感器层3,这三个层皆由3d打印制作,采用3d打印技术制作软体机器人,使用stratasys公司的polyjet技术(3d
打印技术的一种),此技术的打印机可调节硅橡胶材料与硬质材料的比例,以产生邵氏刚度选择范围为30a
‑
95a之间的硅橡胶材料(应变限制层的硅橡胶材料刚度更大一点)。与传统开模、注塑方法制作的软体机器人相比,通过该技术打印可以控制软体机器人的材料刚度,可靠性高,一体成型,便于重复制备。由于气动软体机器人内部的中空结构,打印完毕后要从驱动器腔体内移除支撑材料,采用stratasys公司推荐的化学浸渍法,即:将3d打印部件浸泡在2%氢氧化钠和1%偏硅酸钠的溶液中并搅拌,在此过程后,采用高压水去除残余的支撑材料。
45.其中腔体层1采用邵氏刚度为50a的硅橡胶材料,模型图请参考模型图2
‑
5。
46.请参考图2
‑
图3,软体机器人的腔体层1结构由多个排布均匀的气腔组成,每个气腔的排列方向与底部成垂直角度,这些垂直角度排列的气腔内部依靠一个气道相互连通。
47.请参考图4、腔体层1的截面结构是半圆形。这样设计有两个好处:(1)相比于变截面型结构,半圆形结构可以保证常曲率弯曲(若截面是变化的,则弯曲时曲率肯定处处不相同),从而保证了充气量与弯曲量之间均匀变化。(2)相比于长方形、梯形等截面结构,半圆形结构可以减少应力集中(应力集中:指物体中应力局部增高的现象,一般出现在物体形状急剧变化的地方),使软体机器人的寿命增长。
48.为提高抓取稳定性和抓取效率,具体实施例中仿照人手长度设计软体机器人腔体层1的长度l2为10cm,宽度l6为2.5cm,高度l3 为2.5cm;设计软体机器人腔体层1的侧壁与上壁的壁厚l7为3.5mm (若壁厚过厚,那么要充很多气才能弯曲,不利于抓取效率;若壁厚过薄,充气易破),腔体层1中每一个腔室长度l4为1.5cm,下壁壁厚l5为5.5mm(下壁比上壁需要略厚,这样有利于向下弯曲)。弯曲示意图请参考图5。
49.具体实施例中的应变限制层2采用邵氏刚度65a的硅橡胶材料,其长度和宽度与腔体层1长度、宽度相同,厚度为0.5cm。应变限制层2的弹性形变比腔体层要小很多,因此能够限制整个气动软体机器人轴向变形,从而整个机器人(手指)将向应变限制层一侧弯曲运动。
50.具体实施例中的传感器层3是软体机器人重要部件,传感器层3 用于放置压力传感器和激光测距传感器(请参考图6
‑
图8)。传感器层3最大厚度l8为0.3cm,内部预留出压力传感器和激光测距传感器的凹槽(l9压力传感器,l10激光测距传感器),便于放置,其中凹槽的深度不能太深也不能太薄,太深则容易在抓取时造成传感器层破损,太薄则影响力传感器的测量精度。在传感器层3底部预留一个小洞l11,放置激光测距传感器的激光探头。最后将腔体层、应变限制层、传感器层通过硅橡胶粘在一起。
51.压力传感器与激光测距传感器均通过硅橡胶固定在传感器层3 上。
52.其中,压力传感器采用柔性薄膜压力传感器,通过导线外接测量电路,压力传感器用来反馈压力的大小,形成闭环控制。
53.激光测距传感器采用vl53l0芯片,但目前市面上出售的只有基于硬质电路板的激光测距传感器成品,尚未有基于柔性电路板的传感器成品。然而软体机器人的软体特性要求机器人要尽可能减少刚性部件,所以我们自行设计基于vl53l0芯片的柔性电路板且采用柔性 fpc排线作为导线连接,并自行制作焊接。
54.激光测距传感器作用:现有技术明显的缺陷在于只安装了压力传感器。软体机器人接触到物体之前,瞬间碰撞力无法预测,若这时软体机器人在气压驱动下运动速度很快,
如果在某一瞬间内气压给的很大,那么软体机器人运动速度就很快,如果在某一瞬间气压给的比较小,那么软体机器人运动速度就会变慢),那么碰撞到物体的力就会很大,就会对柔软易碎物体造成损伤;如果软体机器人运动速度很慢,又会影响抓取效率,例如会严重影响对流水线产品的抓取效率。因此激光测距传感器作用是检测机器人与抓取物体之间距离远近,使得机器人运动速度与距离远近成一定比例,轻轻的接触不损伤物体(距离远就快点运动,距离近就慢点运动)。
55.请参考图9,图9是本实用新型具体实施例实现无损抓取的气动软体机器人的控制电路。实现无损抓取的气动软体机器人的控制电路包括:
56.24v电源、220v电源、5v电源、气泵、单片机、mos驱动电路、电磁比例调压阀、压力传感器、激光测距传感器以及气动软体机器人;
57.24v电源连接电磁比例调压阀的电源输入端,220v电源连接气泵的输入端,气泵的输出端连接电磁比例调压阀的气压输入端,电磁比例调压阀的气压输出端连接气动软体机器人;5v电源分别连接单片机、压力传感器和激光测距传感器,所述压力传感器和激光测距传感器均通过硅胶粘于气动软体机器人上,单片机的输出端连接mos 驱动电路的输入端,mos驱动电路的输出端连接电磁比例调压阀的信号输入端。
58.电磁比例调压阀(将电信号转换为气压输出)控制气压输出的大小,将输出的气压输给软体机器人,驱动软体机器人运动。软体机器人上面有压力传感器和激光测距传感器,这两个传感器的数据输入到单片机里,单片机计算此时应该输出多大的气压值(单片机引脚上的电压大小代表气压大小),随后将单片机引脚的电压通过mos管放大电路输入到电磁比例调压阀中。
59.请参考图10,图10是本实用新型具体实施例实现无损抓取的气动软体机器人方法流程图;一种实现无损抓取的气动软体机器人方法,用于一种实现无损抓取的气动软体机器人系统,具体步骤包括:
60.s1、通电之后,电磁比例调压阀控制气压输出的大小,将输出的气压输给软体机器人,实现驱动软体机器人运动;
61.s2、激光测距传感器检测气动软体机器人与被抓物体之间的距离,并将所述距离发送至单片机;
62.s3、单片机将所测距离与距离阈值进行比较,若所测距离小于距离阈值,则执行步骤s6;否则执行步骤s5;
63.s5、以一定比例调节单片机的输出电压,并将所述输出电压通过 mos管放大电路输入到电磁比例调压阀中,并返回步骤s1;
64.s6、压力传感器检测气动软体机器人抓取部位的压力值并发送至单片机;
65.s7、单片机将所测压力值与抓取临界值进行比较,若所测压力值达到抓取临界值,则执行步骤s9;否则执行步骤s8;
66.s8、单片机控制程序发出充气指令至气泵,气泵对气动软体机器人充气,并返回步骤s6;
67.s9、单片机控制程序发出保持此压力指令,控制气动软体机器人以所述压力完成抓取。
68.本实用新型的创新点在于:
69.(1)设计新颖多腔体型气动软体机器人,具有曲率均匀变化、应力集中减弱、增长使用寿命等优点。
70.(2)气动软体机器人采用3d打印polyjet技术制作,与传统开模、注塑方法相比,通过该技术打印可以控制软体机器人的材料刚度,可靠性高,一体成型,便于重复制备。
71.(3)合理设计软体机器人的传感器层,便于安放薄膜压力传感器和激光测距传感器。
72.(4)安装了薄膜压力传感器:便于机器人与物体接触后反馈压力大小,形成闭环控制。
73.(5)安装了激光测距传感器:检测机器人与抓取物体之间距离远近,使得机器人运动速度与距离远近成一定比例,既能防止因碰撞力过大而损坏柔软易碎物体,同时兼具抓取效率。
74.(6)制作激光测距传感器,与传统激光测距传感器不同,本实用新型专利所述激光测距传感器基于柔性电路板自行制作,最大限度减少软体机器人的刚性部件,防止刚性增加。
75.(7)提出一套系统控制电路图和方法操作流程图,保证了系统的稳定可靠运行。
76.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1