工件转移机构的制作方法
1.本实用新型涉及工件转移设备技术领域,尤其涉及一种工件转移机构。
背景技术:
2.在生产制造过程中,经常会使用转移机构对工件进行转移操作,采用机械结构对工件进行转移可有效地节省劳动力,提高生产效率。
3.但是,现有的工件转移机构动作单一,转移工件时只能简单地将上道工序的工件放置到下道工序上,工件的摆放角度不能满足摆放要求,导致转移机构应用场合受限,不能满足工件摆放角度有要求的场合使用,严重影响生产效率。
技术实现要素:
4.本实用新型的目的是克服现有技术存在的缺陷,提供一种工件转移机构。
5.为了实现上述目的,本实用新型提供如下技术方案:
6.本实用新型公开的工件转移机构,包括:
7.布设有固定轴的基架、与所述固定轴旋转连接的转臂;
8.所述基架上部固连有驱动所述转臂旋转的电机部件;
9.所述转臂远离所述固定轴端旋转连接有工件抓取装置;
10.所述工件抓取装置具有能够升降的夹爪,用于抓取工件;
11.其中,所述固定轴固连有a带轮,所述工件抓取装置固连有b带轮,所述a带轮和所述b带轮之间通过传动带传动,以便所述转臂转动地转移工件时,所述a带轮通过所述传动带驱动所述b带轮旋转、以使所述工件抓取装置带动所述夹爪自转。
12.进一步的,所述b带轮直径等于所述a带轮的二分之一直径。
13.进一步的,所述电机部件包括伺服电机、减速机、联轴器;
14.所述基架顶端固连有所述减速机,所述减速机上部固连有所述伺服电机,所述减速机下部通过所述联轴器与使所述转臂固定连接。
15.进一步的,所述传动带为齿形带。
16.进一步的,所述工件抓取装置包括所述夹爪、固连有所述b带轮的转轴;
17.所述转轴与所述转臂旋转连接,且所述转臂上部固连有气缸;
18.所述夹爪安装有贯穿所述转轴的连杆,所述连杆与所述气缸活塞杆固定连接。
19.进一步的,所述转臂包括第一转臂分体和第二转臂分体;以及
20.固定连接所述第一转臂分体和所述第二转臂分体的连接板;
21.所述第一转臂分体和所述第二转臂分体一端均匀所述固定轴旋转连接,所述第一转臂分体和所述第二转臂分体一端另一端均与所述转轴旋转连接。
22.进一步的,所述第一转臂分体和所述第二转臂分体之间的间距大于所述a带轮和所述b带轮的厚度。
23.进一步的,还包括用于张紧传动带的张紧装置。
24.进一步的,所述张紧装置包括固定板和活动板;以及
25.装设在所述活动板上与所述传动带滚动接触的滚轮;
26.所述转臂固连有所述固定板,所述转臂上部滑动连接有所述活动板,所述固定板旋转连接有调节杆,用于驱动所述活动板位移、以使所述滚轮张紧所述传动带。
27.进一步的,所述调节杆一端与所述固定板旋转连接,另一端形成有外螺纹,所述调节杆与所述活动板螺纹传动。
28.在上述技术方案中,本实用新型提供的工件转移机构,有益效果:
29.本实用新型设计的基架设置有固定轴,固定轴上固连有a带轮,转臂一端与固定轴旋转连接,基架通过电机部件驱动转臂旋转,转臂另一端与工件抓取装置旋转连接,工件抓取装置固连有b带轮,a带轮和b带轮之间通过传动带传动,转移工件时,电机部件驱动转臂旋转,a带轮相对于转臂静止,在转臂旋转的同时,a带轮作为主动轮通过传动带驱动b带轮旋转,进而实现转臂将工件从上道工序转移到下道工序过程中工件抓取装置的夹爪完成自转动作,大大地节约了转移工件操作时间,便于工件摆放角度有要求的场合使用,动作精准、效率高,结构可靠,使用方便。
附图说明
30.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
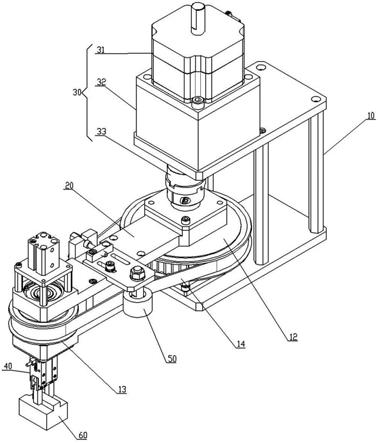
31.图1是本实用新型公开的工件转移机构的轴测图;
32.图2是本实用新型公开的工件转移机构的主视图;
33.图3是本实用新型公开的工件转移机构的左视图;
34.图4是本实用新型公开的工件转移机构的右视图;
35.图5是本实用新型公开的工件转移机构的俯视图。
36.附图标记说明:
37.10、基架;11、固定轴;12、a带轮;13、b带轮;14、传动带;
38.20、转臂;21、第一转臂分体;22、第二转臂分体;23、连接板;24、气缸;
39.30、电机部件;31、伺服电机;32、减速机;33、联轴器;
40.40、工件抓取装置;41、夹爪;42、转轴;43、连杆;
41.50、张紧装置;51、固定板;52、活动板;53、滚轮;54、调节杆;
42.60、工件。
具体实施方式
43.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
44.参见图1所示;
45.实用新型工件转移机构,包括:
46.布设有固定轴11的基架10、与固定轴11旋转连接的转臂20;
47.基架10上部固连有驱动转臂20旋转的电机部件30;
48.转臂20远离固定轴11端旋转连接有工件抓取装置40;
49.工件抓取装置40具有能够升降的夹爪41,用于抓取工件60;
50.其中,固定轴11固连有a带轮12,工件抓取装置40固连有b带轮13,a带轮12和b带轮13之间通过传动带14传动,以便转臂20转动地转移工件60时,a带轮12通过传动带14驱动b带轮13旋转、以使工件抓取装置40带动夹爪41自转。
51.具体的,参见图1所示,该结构中包括基架10、转臂20、电机部件30、工件抓取装置40;
52.基架10一侧设置有固定轴11,固定轴11上固连有a带轮12,基架10位于固定轴11上方固连有电机部件30;
53.转臂20一端与固定轴11旋转连接,并且电机部件30通过联轴器33与转臂20固定连接,转臂20另一端与工件抓取装置40旋转连接,转臂20对应工件抓取装置40的上方固连有气缸24,通过气缸24驱动工件抓取装置40夹爪41升降;
54.工件抓取装置40固连有b带轮13,a带轮12和b带轮13之间通过传动带14传动;
55.工作时,电机部件30驱动转臂20旋转,a带轮12相对于转臂20静止,在转臂20旋转的同时,a带轮12作为主动轮通过传动带14驱动b带轮13旋转,进而实现,转臂20将工件60从上道工序转移到下道工序过程中工件抓取装置40的夹爪41完成自转动作,便于工件摆放角度有要求的场合使用,节约操作时间,提高了工作效率,参见图1所示;
56.优选的,b带轮13直径等于a带轮12的二分之一直径。
57.具体的,将b带轮13直径设置成等于a带轮12的二分之一直径,当转臂20旋转90
°
地转移工件60时,a带轮12静止不动,转臂20围绕a带轮12旋转四分之一圈,a带轮12通过传动带14驱动b带轮13旋转,使b带轮13旋转二分之一圈,进而实现工件抓取装置40的夹爪41自转180
°
,满足了在转移工件60的同时完成工件60自转的工况需求,节约时间,有利于提高生产效率;
58.参见图1所示;
59.优选的,电机部件30包括伺服电机31、减速机32、联轴器33;
60.基架10顶端固连有减速机32,减速机32上部固连有伺服电机31,减速机32下部通过联轴器33与使转臂20固定连接。通过伺服电机31与控制系统连接,速度可控,位置精度高;
61.参见图1所示;
62.优选的,传动带14为齿形带。通过齿形带传动,齿形带与a带轮12和b带轮13之间没有相对滑动,从而保证了同步传动,传动比恒定。
63.参见图3、4所示;
64.优选的,工件抓取装置40包括夹爪41、固连有b带轮13的转轴42;
65.转轴42与转臂20旋转连接,且转臂20上部固连有气缸24;
66.夹爪41安装有贯穿转轴42的连杆43,连杆43与气缸24活塞杆固定连接。工作时,通过气缸43的活塞杆伸出或缩回,实现控制夹爪41升降。
67.参见图3所示;
68.优选的,转臂20包括第一转臂分体21和第二转臂分体22;以及
69.固定连接第一转臂分体21和第二转臂分体22的连接板23;
70.第一转臂分体21和第二转臂分体22一端均匀固定轴11旋转连接,第一转臂分体21和第二转臂分体22一端另一端均与转轴42旋转连接。
71.具体的,该结构中,转臂20为分体结构,转臂20包括第一转臂分体21和第二转臂分体22,第一转臂分体21和第二转臂分体22之间通过连接板23固定连接,并且,第一转臂分体21和第二转臂分体22之间的间距大于a带轮12和b带轮13的厚度。a带轮12和b带轮13可以装设在第一转臂分体21和第二转臂分体22之间,结构紧凑;
72.参见图1所示;
73.优选的,还包括用于张紧传动带14的张紧装置50;通过张紧装置50保证传动带14传动精度。
74.参见图5所示;
75.优选的,张紧装置50包括固定板51和活动板52;以及
76.装设在活动板52上与传动带14滚动接触的滚轮53;
77.转臂20固连有固定板51,转臂20上部滑动连接有活动板52,固定板51旋转连接有调节杆54,用于驱动活动板52位移、以使滚轮53张紧传动带14。优选的,调节杆54一端与固定板51旋转连接,另一端形成有外螺纹,调节杆54与活动板52螺纹传动。具体的,转臂20的第二转臂分体22一侧固连有固定板51,第二转臂分体22的上表面固连有定位销,活动板52通过长条孔与第二转臂分体22上表面的定位销滑动连接,张紧时,旋转固定板51上的调节杆54,调节杆54螺旋转动地驱动活动板52朝向固定板51方向位移,进而张紧传动带14,操作简单,使用方便
78.在上述技术方案中,本实用新型提供的工件转移机构;
79.工作原理:
80.当将工件60从上道工序转移到下道工序时,工件抓取装置40位于上道工序上方;
81.参见图3所示,气缸24活塞杆伸出,驱动连杆43推动夹爪41下降,夹爪41抓取工件60,工件60被抓取后,气缸24活塞杆缩回,驱动连杆43拉动夹爪41上升;
82.伺服电机31驱动转臂20旋转90
°
,a带轮12静止不动,转臂20围绕a带轮12旋转四分之一圈,a带轮12通过传动带14驱动b带轮13旋转,使b带轮13旋转二分之一圈,进而使夹爪41自转180
°
;
83.转臂20旋转90
°
后位于下道工序上方,气缸24活塞杆伸出,驱动连杆43推动夹爪41下降,夹爪41松开工件60,工件60转移完毕;
84.有益效果:
85.本实用新型设计的基架设置有固定轴,固定轴上固连有a带轮,转臂一端与固定轴旋转连接,基架通过电机部件驱动转臂旋转,转臂另一端与工件抓取装置旋转连接,工件抓取装置固连有b带轮,a带轮和b带轮之间通过传动带传动,转移工件时,电机部件驱动转臂旋转,a带轮相对于转臂静止,在转臂旋转的同时,a带轮作为主动轮通过传动带驱动b带轮旋转,进而实现转臂将工件从上道工序转移到下道工序过程中工件抓取装置的夹爪完成自转动作,大大地节约了转移工件操作时间,便于工件摆放角度有要求的场合使用,动作精准、效率高,结构可靠,使用方便。
86.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的
方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1