一种自动机整体升降抓料机械手的制作方法
1.本实用新型涉及一种机械手,特别是指一种整体升降式抓料机械手。
背景技术:
2.机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。一般的取料机械手其传动关节较多,不能负荷较大重量的物料,而此是为传统技术的主要缺点。
技术实现要素:
3.本实用新型所采用的技术方案为:一种自动机整体升降抓料机械手,其包括升降单元、横移单元以及抓料单元,其中,该抓料单元设置在该横移单元端部,该横移单元设置在该升降单元顶部,该升降单元连接在物料工作间一侧。
4.该升降单元包括升降驱动电机、丝杠、顶部固定板以及两个侧滑轨,其中,该升降驱动电机固定设置在该物料工作间上,该丝杠连接在该升降驱动电机与该顶部固定板之间,每一个该侧滑轨都包括固定滑轨以及滑板,该滑板滑动设置在该固定滑轨中,该固定滑轨固定设置在该物料工作间上。
5.该横移单元包括滑轨以及滑杆,该滑杆滑动设置在该滑轨中。
6.该升降单元的该顶部固定板以及该滑板固定连接在该滑轨上,通过上述的结构,使该升降单元能够驱动该横移单元整体上升或者下降。
7.在具体实施的时候,该横移单元还包括横移驱动器,该横移驱动器包括横移驱动电机、主驱动轮、从动轮、皮带以及连接器,其中,该横移驱动电机、该主驱动轮、该从动轮同时设置在该滑轨上,该主驱动轮连接在该横移驱动电机的输出轴上,该皮带连接在该主驱动轮与该从动轮之间,该连接器连接在该皮带与该滑杆之间。
8.该抓料单元固定连接在该滑杆端部,在具体实施的时候,该抓料单元包括若干横梁杆以及若干取料杆,其中,若干该横梁杆固定连接在该滑杆上,若干该取料杆架设在若干该横梁杆上,每一条该取料杆上都设置有若干取料爪,在具体实施的时候,该抓料单元包括两条该横梁杆,两条该横梁杆相互平行,在具体实施的时候,该取料爪为吸盘。
9.本实用新型的有益效果为:本实用新型的使该升降单元能够驱动该横移单元整体上升或者下降,同时,该横移单元能够驱动该抓料单元整体左右横移,本实用新型为垂直整体升降式的机械手,其可适应各种不同高度治具和测试架自动适应抓取高度,本实用新型整体安装在物料工作间上,整体结构平稳能够进行大重量大负荷的工作。
附图说明
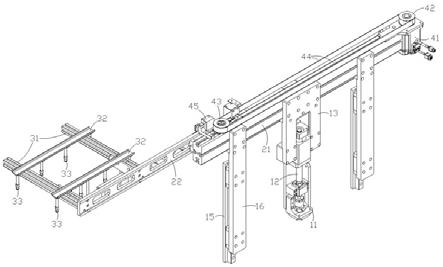
10.图1为本实用新型的装配结构示意图。
11.图2为本实用新型的结构示意图。
具体实施方式
12.如图1至2所示,一种自动机整体升降抓料机械手,其包括升降单元10、横移单元20以及抓料单元30,其中,该抓料单元30设置在该横移单元20端部,该横移单元20设置在该升降单元10顶部,该升降单元10连接在物料工作间100一侧。
13.该升降单元10包括升降驱动电机11、丝杠12、顶部固定板13以及两个侧滑轨14,其中,该升降驱动电机11固定设置在该物料工作间100上,该丝杠12连接在该升降驱动电机11与该顶部固定板13之间。
14.每一个该侧滑轨14都包括固定滑轨15以及滑板16,该滑板16滑动设置在该固定滑轨15中,该固定滑轨15固定设置在该物料工作间100上。
15.该横移单元20包括滑轨21以及滑杆22,该滑杆22滑动设置在该滑轨21中。
16.该升降单元10的该顶部固定板13以及该滑板16固定连接在该滑轨21上,通过上述的结构,使该升降单元10能够驱动该横移单元20整体上升或者下降。
17.在具体实施的时候,该横移单元20还包括横移驱动器40,该横移驱动器40包括横移驱动电机41、主驱动轮42、从动轮43、皮带44以及连接器45,其中,该横移驱动电机41、该主驱动轮42、该从动轮43同时设置在该滑轨21上,该主驱动轮42连接在该横移驱动电机41的输出轴上,该皮带44连接在该主驱动轮42与该从动轮43之间,该连接器45连接在该皮带44与该滑杆22之间。
18.该抓料单元30固定连接在该滑杆22端部。
19.在具体实施的时候,该抓料单元30包括若干横梁杆31以及若干取料杆32,其中,若干该横梁杆31固定连接在该滑杆22上,若干该取料杆32架设在若干该横梁杆31上,每一条该取料杆32上都设置有若干取料爪33。
20.在具体实施的时候,该抓料单元30包括两条该横梁杆31,两条该横梁杆31相互平行,在具体实施的时候,该取料爪33为吸盘。
21.本实用新型的使该升降单元10能够驱动该横移单元20整体上升或者下降,同时,该横移单元20能够驱动该抓料单元30整体左右横移,本实用新型为垂直整体升降式的机械手,其可适应各种不同高度治具和测试架自动适应抓取高度,本实用新型整体安装在物料工作间100上,整体结构平稳能够进行大重量大负荷的工作。
技术特征:
1.一种自动机整体升降抓料机械手,其特征在于:包括升降单元、横移单元以及抓料单元,其中,该抓料单元设置在该横移单元端部,该横移单元设置在该升降单元顶部,该升降单元连接在物料工作间一侧,该升降单元包括升降驱动电机、丝杠、顶部固定板以及两个侧滑轨,其中,该升降驱动电机固定设置在该物料工作间上,该丝杠连接在该升降驱动电机与该顶部固定板之间,每一个该侧滑轨都包括固定滑轨以及滑板,该滑板滑动设置在该固定滑轨中,该固定滑轨固定设置在该物料工作间上,该横移单元包括滑轨以及滑杆,该滑杆滑动设置在该滑轨中,该升降单元的该顶部固定板以及该滑板固定连接在该滑轨上,该横移驱动器包括横移驱动电机、主驱动轮、从动轮、皮带以及连接器,其中,该横移驱动电机、该主驱动轮、该从动轮同时设置在该滑轨上,该主驱动轮连接在该横移驱动电机的输出轴上,该皮带连接在该主驱动轮与该从动轮之间,该连接器连接在该皮带与该滑杆之间,该抓料单元固定连接在该滑杆端部,该抓料单元包括若干横梁杆以及若干取料杆,其中,若干该横梁杆固定连接在该滑杆上,若干该取料杆架设在若干该横梁杆上,每一条该取料杆上都设置有若干取料爪。2.如权利要求1所述的一种自动机整体升降抓料机械手,其特征在于:该抓料单元包括两条该横梁杆,两条该横梁杆相互平行。3.如权利要求1所述的一种自动机整体升降抓料机械手,其特征在于:该取料爪为吸盘。
技术总结
本实用新型涉及一种自动机整体升降抓料机械手,其包括升降单元、横移单元以及抓料单元,其中,该抓料单元设置在该横移单元端部,该横移单元设置在该升降单元顶部,该升降单元连接在物料工作间一侧,本实用新型为垂直整体升降式的机械手,其可适应各种不同高度治具和测试架自动适应抓取高度,本实用新型整体安装在物料工作间上,整体结构平稳能够进行大重量大负荷的工作。负荷的工作。负荷的工作。
技术研发人员:袁卫成
受保护的技术使用者:深圳市众博信科技有限公司
技术研发日:2020.12.31
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1