一种协助机器人用的耐磨装饰环的制作方法
1.本实用新型涉及协助机器人技术领域,尤其涉及一种协助机器人用的耐磨装饰环。
背景技术:
2.单调、重复性高、危险性强的工作正逐渐被传统的工业机器人取代,而协作机器人一般是指参与人类活动、协助人类共同完成工作的一种机器人,协助机器人也将慢慢渗入各个工业领域。随着协助机器人应用领域的逐渐变广,市场对其性能以及外观的要求也越来越高。协助机器人是通过多个模组组装形成的,协助机器人关节与连杆之间会产生缝隙,关节与关节间之间也会产生缝隙,目前处理这些缝隙一般是通过耐磨塑料环和橡胶装饰环联用进行处理的。如图1所示,耐磨环一般是采用耐磨塑料制作而成,耐磨环上设置有缺口,使用时,将耐磨环从缺口处打开,然后卡进缝隙里。但往往因为缺口打开幅度太大,耐磨环不能恢复到原来的形状,此时就需要将具有伸缩弹性的橡胶装饰环套在耐磨环上,从而把耐磨环环固定在缝隙里。现有的这种处理方式存在以下缺陷:需要耐磨塑料环和橡胶装饰环配套使用,结构较复杂,安装操作步骤较多。
技术实现要素:
3.为了克服现有技术的不足,本实用新型的目的在于提供一种协助机器人用的耐磨装饰环,结构简单,使用方便。
4.本实用新型的目的采用如下技术方案实现:
5.一种协助机器人用的耐磨装饰环,包括第一分环和第二分环;所述第一分环的内圈设置有若干第一避空部;所述第一分环的一端设置有至少一个第一缺口,所述第一分环的另一端设置有至少一个第一突出部;所述第二分环的内圈设置有若干第二避空部;所述第二分环的一端设置有至少一个第二缺口,所述第二分环的另一端设置有至少一个第二突出部;所述第一缺口与所述第二突出部过盈配合可拆卸连接,所述第二缺口与所述第一突出部过盈配合可拆卸连接,使得所述第一分环和所述第二分环形成闭环结构。
6.进一步地,所述第一突出部和所述第二突出部均包括一体成型的矩形部和圆头部。
7.进一步地,若干所述第一避空部沿所述第一分环的内圈均匀分布;若干所述第二避空部沿所述第二分环的内圈均匀分布。
8.进一步地,所述第一避空部和所述第二避空部均为拱门形避空部。
9.进一步地,所述第一分环和所述第二分环均为半圆形分环。
10.进一步地,所述第一分环的一端设置有一个第一缺口,所述第一分环的另一端设置有一个第一突出部;所述第二分环的一端设置有一个第二缺口,所述第二分环的另一端设置有一个第二突出部。
11.进一步地,所述第一分环的一端设置有两个第一缺口,所述第一分环的另一端设
置有两个第一突出部;所述第二分环的一端设置有两个第二缺口,所述第二分环的另一端设置有两个第二突出部。
12.进一步地,所述第一分环与所述第一突出部一体成型。
13.进一步地,所述第二分环与所述第二突出部一体成型。
14.进一步地,所述第一分环为聚乙烯塑料环或聚酰胺树脂环;所述第二分环为聚乙烯塑料环或聚酰胺树脂环。
15.相比现有技术,本实用新型的有益效果在于:
16.本实用新型所提供的协助机器人用的耐磨装饰环用于填充协助机器人关节与连杆的缝隙,或者用于填充关节与关节间连接产生的缝隙,从而使得协助机器人的外表美观。本实用新型的装饰环是通过第一分环和第二分环实现连接的,在安装时,第一分环和第二分环分别相对卡进关节与连杆之间的缝隙,或者卡进关节与关节间连接产生的缝隙,第一分环和第二分环对好扣合位置,即第一缺口与第二突出部对接,第二缺口与第一突出部对接,接着再由外至内施加压力,第一分环和第二分环便会扣合成一个整体的环,通过这样简单的方式即实现了安装。在拆卸时,只要用工具在装饰环扣合处轻轻撬一下就可拆下来了,非常简单。即本实用新型所提供的协助机器人用的耐磨装饰环结构简单,使用方便,能够节省人力物力。
附图说明
17.图1为现有装饰环中耐磨塑料环的示意图;
18.图2为现有装饰环与模组之间的拆分示意图;
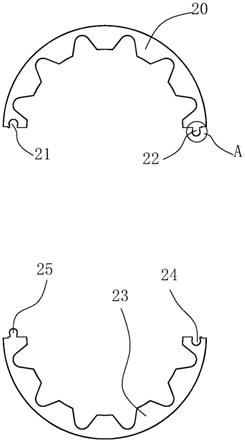
19.图3为本实用新型实施例所提供的装饰环的拆分示意图;
20.图4为本实用新型实施例所提供的装饰环与模组之间的拆分示意图;
21.图5为图3圆圈a处的放大示意图。
22.图中:10、缺口;11、耐磨塑料环;12、橡胶装饰环;20、第一分环;21、第一缺口;22、第一突出部;23、第二分环;24、第二缺口;25、第二突出部;26、圆头部;27、矩形部;30、第一模组;31、第二模组;32、缝隙。
具体实施方式
23.下面,结合附图以及具体实施方式,对本实用新型做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
24.如图1
‑
2所示,现有的协助机器人用耐磨环一般是采用耐磨塑料制作而成,耐磨塑料环11上设置有缺口10,使用时,将耐磨塑料环11从缺口10处打开,然后卡进缝隙32里。但往往因为缺口10打开幅度太大,耐磨塑料环11不能恢复到原来的形状,此时就需要将具有伸缩弹性的橡胶装饰环12套在耐磨塑料环11上,从而把耐磨塑料环11固定在缝隙32里。即现有的协助机器人在填充缝隙32时,需要耐磨塑料环11和橡胶装饰环12配套使用,结构较复杂,安装操作步骤较多。为了解决此问题,本实用新型实施例提供了新的方案,具体如下所述。
25.如图3
‑
5所示,一种协助机器人用的耐磨装饰环,包括第一分环20和第二分环23;
第一分环20的内圈设置有若干第一避空部;第一分环20的一端设置有至少一个第一缺口21,第一分环20的另一端设置有至少一个第一突出部22;第二分环23的内圈设置有若干第二避空部;第二分环23的一端设置有至少一个第二缺口24,第二分环23的另一端设置有至少一个第二突出部25;第一缺口21与第二突出部25过盈配合可拆卸连接,第二缺口24与第一突出部22过盈配合可拆卸连接,使得第一分环20和第二分环23形成闭环结构。
26.在本实用新型实施例中,过盈配合包括最小过盈等于零的配合,即包括第一缺口21和第二突出部25两者刚好匹配卡接的情况,也包括第二突出部25稍稍大于第一缺口21,使得第二突出部25紧紧地卡接在第一缺口21内的情况。
27.本实用新型实施例所提供的协助机器人用的耐磨装饰环,在安装时,第一分环20和第二分环23分别相对卡进关节与连杆之间的缝隙32,或者卡进关节与关节间连接产生的缝隙32,第一分环20和第二分环23对好扣合位置,即第一缺口21与第二突出部25对接,第二缺口24与第一突出部22对接,接着再由外至内施加压力,第一分环20和第二分环23便会扣合成一个整体的环,通过这样简单的方式即实现了安装。在拆卸时,只要用工具在装饰环扣合处轻轻撬一下就可拆下来了,非常简单。第一分环20上设置有第一避空部,第二分环23上设置有第二避空部,第一避空部和第二避空部可以避空第一模组30和第二模组31连接时用的螺栓的螺栓头,使得装饰环与机器人的连接整体性更好,美观大方。
28.作为进一步的实施方式,第一突出部22和第二突出部25均包括一体成型的矩形部27和圆头部26,这样的结构简单,也方便连接和拆卸。当然,第一突出部22和第二突出部25也可以采取其他形状,例如仅设置为圆形、仅设置为矩形,或者设置为五边形、六边形均可,只要能实现第一突出部22和第二缺口24的匹配连接,实现第二突出部25和第一缺口21的匹配连接,以及它们之间的拆卸即可。
29.作为进一步的实施方式,若干第一避空部沿第一分环20的内圈均匀分布;若干第二避空部沿第二分环23的内圈均匀分布。避空部的设置是为了避免装饰环在安装时与模组上的螺栓头形成干涉,为螺栓头提供了置放空间。当然,避空部可以根据机器人的实际情况进行专门设计,根据螺栓头的实际形状和位置进行相应的布局。但是第一避空部和第二避空部采取均匀分布的设置方式,通用性广,基本适合用于不同模组之间的缝隙32。
30.作为进一步的实施方式,第一避空部和第二避空部均为拱门形避空部,设置为拱门形避空部能够很好地为螺栓头提供空间,不会对螺栓头造成干涉。当然,第一避空部和第二避空部也可以设置为其他形状,只要能为螺栓头避空就行。
31.作为进一步的实施方式,第一分环20和第二分环23均为半圆形分环,第一分环20和第二分环23连接时形成一个整体的圆环,通用性强,且两个分环结构对称,连接稳定性更高。当然,第一分环20可以设置成小半圆环,第二分环23可以设置为大板圆环。或者,如果模组之间的缝隙32为正方形缝隙32,可以将第一分环20设置为矩形半环,第二分环23设置为矩形半环,第一分环20和第二分环23结合后形成一个整体的矩形环。第一分环20和第二分环23连接后甚至可以是完整的五边形环、六边形环等,只要能填充缝隙32,与缝隙32匹配,起美观作用即可,可以灵活设计。
32.作为进一步的实施方式,第一分环20的一端设置有一个第一缺口21,第一分环20的另一端设置有一个第一突出部22;第二分环23的一端设置有一个第二缺口24,第二分环23的另一端设置有一个第二突出部25。一个第一缺口21与一个第二突出部25对接,一个第
二缺口24与一个第一突出部22对接,结构简单,安装方便。但是,第一缺口21、第二缺口24、第一突出部22、第二突出部25的数量也是可以变化的,例如:第一分环20的一端设置有两个第一缺口21,第一分环20的另一端设置有两个第一突出部22;第二分环23的一端设置有两个第二缺口24,第二分环23的另一端设置有两个第二突出部25,设置多个缺口和多个突出部分别对接,进一步提高连接稳定性。特别是对于装饰环比较大的情况下,设多个突出部进行连接能够避免第一分环20与第二分环23连接不稳的情况。
33.作为进一步的实施方式,第一分环20与第一突出部22一体成型,第二分环23与第二突出部25一体成型,一体成型的设置方式整体性好,加工方便。
34.作为进一步的实施方式,第一分环20为聚乙烯塑料环或聚酰胺树脂环;第二分环23为聚乙烯塑料环或聚酰胺树脂环。pe塑料和pa树脂的弹性好,两个半环相互扣合或拆卸的过程中,突出部和缺口很容易就会变形(张开)和恢复原形(闭合),弹性好的pe和pa使得变形容易实现。在第一分环20和第二分环23制作过程中只要控制好装饰环的厚度和机器人关节与连杆之间的缝隙32匹配,或装饰环的厚度和关节与关节间连接产生缝隙32的匹配,两分环即可连接稳固。
35.本实用新型实施例所提供的协助机器人用的耐磨装饰环用于填充协助机器人关节与连杆的缝隙32,或者用于填充关节与关节间连接产生的缝隙32,从而使得协助机器人的外表美观。本实用新型的装饰环是通过第一分环20和第二分环23实现连接的,在安装时,第一分环20和第二分环23分别相对卡进关节与连杆之间的缝隙32,或者卡进关节与关节间连接产生的缝隙32,第一分环20和第二分环23对好扣合位置,即第一缺口21与第二突出部25对接,第二缺口24与第一突出部22对接,接着再由外至内施加压力,第一分环20和第二分环23便会扣合成一个整体的环,通过这样简单的方式即实现了安装。在拆卸时,只要用工具在装饰环扣合处轻轻撬一下就可拆下来了,非常简单。即本实用新型实施例所提供的协助机器人用的耐磨装饰环结构简单,使用方便,能够节省人力物力。
36.上述实施方式仅为本实用新型的优选实施方式,不能以此来限定本实用新型保护的范围,本领域的技术人员在本实用新型的基础上所做的任何非实质性的变化及替换均属于本实用新型所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1