一种适应食品抓取的机器人末端执行器装置
1.本技术涉及食品分拣末端执行器技术领域,尤其是涉及的是一种适应食品抓取的机器人末端执行器装置。
背景技术:
2.在食品、医药等轻工业领域中,存在着大量重复性高的劳动,例如分拣、拾取装箱的工序,这些工作一般由人工完成,不仅劳动强度大,而且会具有一定的污染风险,导致企业成本也较高,随着生产技术的提高,人工作业越来越不满足生产需求,工业机器人的需求越来越大。
3.分拣包装作业时流水线上不可或缺的环节,随着经济发展和制造业竞争的加剧,人工包装产品的弊端日益显露,人工包装不仅速度慢,影响效益,且长时间的单调工作容易使人疲劳,引发人身安全隐患。因此目前逐渐将机器人、运动控制、机器视觉等先进技术应用到食品生产行业,搭建自动分拣包装系统。然而由于食品行业中分拣品的繁杂,且机器人末端执行器抓取装置较为单一,难以适应不同分拣品的分拣,而使其需要多个不同抓取方式的机器人,这就导致成本相应的增加。
技术实现要素:
4.本技术的其他特征和优点将在随后的说明书中阐述,并且部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的目的和其他优点可通过说明书以及其他说明书附图中所特别指出的结构来实现和获得。
5.本技术的目的在于克服上述不足,提供一种适应食品抓取的机器人末端执行器装置,以解决现有机器人末端执行器抓取装置较为单一,难以适应不同分拣品的分拣的问题。
6.为实现上述目的,本技术的技术解决方案是:一种适应食品抓取的机器人末端执行器装置,包括底座以及双头连接架,所述底座的一端转动连接有第一轴支架,所述第一轴支架的另一端转动连接有第二轴支架,所述第二轴支架的另一端转动连接有第三轴支架;所述双头连接架与第三轴支架转动连接,所述双头连接架的两端分别设置有装夹机构以及吸附机构,所述第三轴支架设有内凹的让位槽,所述让位槽的深度大于装夹机构与吸附机构,所述装夹机构包括装夹体、固定装夹器以及活动装夹器,所述活动装夹器与装夹体滑动连接,并相对固定装夹器移动,所述吸附机构包括吸附主体、可拆卸设置在吸附主体两侧的吸附副体,所述吸附主体与吸附副体上均设有若干个吸盘,所述吸盘通过气管与气泵相连接。
7.在一些实施例中,所述双头连接架对应第三轴支架的位置设有旋转座,所述旋转座与第三轴支架转动连接,所述旋转座通过调节电机驱动。
8.在一些实施例中,所述双头连接架的两端分别设置有夹具接头和吸附接头,所述夹具接头与装夹机构相连接,所述吸附接头与吸附机构相连接,所述夹具接头与吸附接头均通过转动电机驱动旋转。
9.在一些实施例中,所述装夹体的一端设置有内凹的活动槽,所述装夹体的一侧设置有贯穿至活动槽的导孔,所述装夹器穿过导孔嵌入活动槽内,并相对固定装夹器移动。
10.在一些实施例中,所述活动槽内设置有管体,所述管体的一端设置有内凹的管腔,所述管体的一侧设置有贯穿至管腔的管孔,所述装夹器包括活动夹板以及滑块,所述夹板设置于滑块上,所述滑块嵌入活动槽内,所述滑块对应管体的位置贯穿有活动孔,所述活动孔对应管孔的位置设置有驱动连接块,所述驱动连接块穿过管孔,所述驱动连接块的端部设有气缸,所述气缸嵌入管腔内,所述管体上设有可伸缩的密封套,所述密封套用于密封管孔,将管腔的底部与气缸形成密封空间。
11.在一些实施例中,所述密封套包括可伸缩的伸缩套,所述伸缩套内表面设有凸出的密封带,所述密封带嵌套于管孔上,所述密封带的端部设置密封环,所述密封环紧贴气缸,所述密封环对应气缸的气口贯穿有气孔。
12.在一些实施例中,所述活动夹板与滑块之间设置加强筋。
13.在一些实施例中,所述吸附主体对应吸附副体的侧面设有内凹的连接槽,所述连接槽的槽底设置有向两侧内凹的限位槽,所述吸附副体对应连接槽的位置设置有连接条,所述连接条对应限位槽的位置设置有限位条,所述连接条嵌入连接槽内,所述限位条嵌入限位槽内,所述吸附主体的两端分别滑动连接有卡块,所述卡块用于将限位条卡在限位槽内。
14.在一些实施例中,所述吸附主体对应卡块的位置设有内凹的滑槽,所述卡块嵌入滑槽内,所述限位条端部对应卡块的位置设有内凹的卡槽,所述卡块嵌入卡槽内。
15.在一些实施例中,所述第三轴支架靠近第二轴支架的一端设置有连接柱,所述连接柱表面设置有内凹的限位环,所述第二轴支架对应限位环的位置设置有快换机构,所述快换机构包括快换壳体,所述快换壳体固定于第二轴支架上,所述快换壳体朝向第二轴支架的一端设置有内凹的活动槽,所述活动槽的槽底贯穿有活动孔,所述活动槽内嵌套有活动杆,所述活动杆的一端嵌入限位环内,所述活动杆的另一端穿过活动孔,所述活动杆上设置有推块,所述活动槽内嵌套有弹簧,所述弹簧的一端支撑于活动槽的槽底,所述弹簧的另一端支撑于推块上。
16.通过采用上述的技术方案,本技术的有益效果是:本技术第一轴支架、第二轴支架以及第三轴支架的设置,可使双头连接架能够经过多轴的方向转动和移动,使双头连接架能够在分拣工作时实现对食品的分拣动作。第三轴支架的让位槽可对双头连接架转动方向时对装夹机构以及吸附机构进行让位。双头连接架上设置的装夹机构与吸附机构可根据分拣的食品进行使用,当需要通过装夹的方式进行分拣食品时,可转动双头连接架,使装夹机构转动至食品的位置,当需要通过吸附的方式进行分拣食品时,可转动双头连接架,使吸附机构转动至食品的位置。在吸附机构设置的吸附主体与吸附副体的可拆卸结构,使得需要分拣面积较大的平面食品时,可通过安装吸附副体增加吸附面积,以便于适用面积较大的平面食品,当分拣面积较大小的平面食品时,可通过拆下吸附副体,减小吸附面积,以便于适用面积较小的平面食品。
17.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
18.无疑的,本技术的此类目的与其他目的在下文以多种附图与绘图来描述的较佳实
施例细节说明后将变为更加显见。
19.为让本技术的上述和其他目的、特征和优点能更明显易懂,下文特举一个或数个较佳实施例,并配合所示附图,作详细说明如下。
附图说明
20.附图用来提供对本技术的进一步理解,并且构成说明书的一部分,与本技术的实施例共同用于解释本技术,并不构成对本技术的限制。
21.在附图中,相同的部件使用相同的附图标记,并且附图是示意性的,并不一定按照实际的比例绘制。
22.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本技术的一个或数个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据此类附图获得其他的附图。
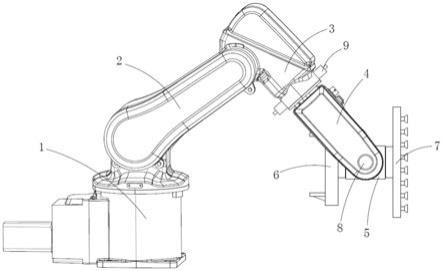
23.图1为本技术一些实施例的适应食品抓取的机器人末端执行器装置的结构示意图;
24.图2为本技术一些实施例的第三轴支架的剖面结构示意图;
25.图3为本技术一些实施例的双头连接架、装夹机构和吸附机构的结构示意图;
26.图4为本技术一些实施例的双头连接架的结构示意图;
27.图5为本技术一些实施例的装夹机构的结构示意图;
28.图6为本技术一些实施例的管体的结构示意图;
29.图7为本技术一些实施例的活动装夹器的底部结构示意图;
30.图8为本技术一些实施例的密封套的结构示意图;
31.图9为本技术一些实施例的吸附机构的分解结构示意图;
32.图10为本技术一些实施例的图9中的放大结构示意图;
33.图11为本技术一些实施例的第二轴支架与第三轴支架的分解图结构示意图;
34.图12为本技术一些实施例的快换机构的剖面结构示意图。
35.附图标记说明:
36.1、底座;
37.2、第一轴支架;
38.3、第二轴支架;
39.4、第三轴支架;
40.41、让位槽;42、连接柱;43、限位环;
41.5、双头连接架;
42.51、旋转座;52、夹具接头;53、吸附接头;
43.6、装夹机构;
44.61、装夹体;611、活动槽;612、导孔;
45.62、固定装夹器;
46.63、活动装夹器;631、活动夹板;632、滑块;633、加强筋;634、活动孔;635、驱动连接块;636、气缸;
47.64、管体;641、管腔;642、管孔;
48.65、密封套;651、伸缩套;652、密封带;653、密封环;654、气孔;
49.7、吸附机构;
50.71、吸附主体;711、连接槽;712、限位槽;713、卡块;714、滑槽;
51.72、吸附副体;721、连接条;722、限位条;723、卡槽;
52.73、吸盘;
53.8、调节电机;
54.9、快换机构;
55.91、快换壳体;92、活动槽;93、活动孔;94、活动杆;95、推块;96、弹簧。
具体实施方式
56.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合具体实施方式对本技术进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本技术,但并不用于限定本技术。
57.另外,在本技术的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
58.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。但注明直接连接则说明连接地两个主体之间并不通过过渡结构构建连接关系,只通过连接结构相连形成一个整体。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
59.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。
60.下面参照附图说明本技术的具体实施方式。
61.参照图1-5、9,图1为本技术一些实施例的适应食品抓取的机器人末端执行器装置的结构示意图;图2为本技术一些实施例的第三轴支架的剖面结构示意图;图3为本技术一些实施例的双头连接架、装夹机构和吸附机构的结构示意图;图4为本技术一些实施例的双头连接架的结构示意图;图5为本技术一些实施例的装夹机构的结构示意图;图9为本技术一些实施例的吸附机构的分解结构示意图。
62.根据本技术的一些实施例,本技术提供了一种适应食品抓取的机器人末端执行器
装置,包括底座1以及双头连接架5。该底座1的一端转动连接有第一轴支架2,该第一轴支架2的另一端转动连接有第二轴支架3,该第二轴支架3的另一端转动连接有第三轴支架4;该双头连接架5与第三轴支架4转动连接,该双头连接架5的两端分别设置有装夹机构6以及吸附机构7,该第三轴支架4设有内凹的让位槽41,该让位槽41的深度大于装夹机构6与吸附机构7,该装夹机构6包括装夹体61、固定装夹器62以及活动装夹器63,该活动装夹器63与装夹体61滑动连接,并相对固定装夹器62移动,该吸附机构7包括吸附主体71、可拆卸设置在吸附主体71两侧的吸附副体72,该吸附主体71与吸附副体72上均设有若干个吸盘73,该吸盘73通过气管与气泵相连接。
63.底座1用于支撑第一轴支架2、第二轴支架3、第三轴支架4以及双头连接架5。第一轴支架2、第二轴支架3以及第三轴支架4的设置,可使双头连接架5能够经过多轴的方向转动和移动,使双头连接架5能够在分拣工作时实现对食品的分拣动作。第三轴支架4的让位槽41可对双头连接架5转动方向时对装夹机构6以及吸附机构7进行让位。双头连接架5上设置的装夹机构6与吸附机构7可根据分拣的食品进行使用,当需要通过装夹的方式进行分拣食品时,可转动双头连接架5,使装夹机构6转动至食品的位置,当需要通过吸附的方式进行分拣食品时,可转动双头连接架5,使吸附机构7转动至食品的位置。在吸附机构7设置的吸附主体71与吸附副体72的可拆卸结构,使得需要分拣面积较大的平面食品时,可通过安装吸附副体72增加吸附面积,以便于适用面积较大的平面食品,当分拣面积较大小的平面食品时,可通过拆下吸附副体72,减小吸附面积,以便于适用面积较小的平面食品。通过气泵的驱动能够进行吸气,并通过吸气的方式,由吸盘73与食品表面接触的位置进行吸附形成负压,从而能够将食品吸起来。
64.参照图1、3、4,图1为本技术一些实施例的适应食品抓取的机器人末端执行器装置的结构示意图;图3为本技术一些实施例的双头连接架、装夹机构和吸附机构的结构示意图;图4为本技术一些实施例的双头连接架的结构示意图。
65.根据本技术的一些实施例,可选的,该双头连接架5对应第三轴支架4的位置设有旋转座51,该旋转座51与第三轴支架4转动连接,该旋转座51通过调节电机8驱动。
66.根据本技术的一些实施例,可选的,该双头连接架5的两端分别设置有夹具接头52和吸附接头53,该夹具接头52与装夹机构6相连接,该吸附接头53与吸附机构7相连接,该夹具接头52与吸附接头53均通过转动电机驱动旋转,其中转动电机安装于双头连接架5内。
67.参照图5-8,图5为本技术一些实施例的装夹机构的结构示意图;图6为本技术一些实施例的管体的结构示意图;图7为本技术一些实施例的活动装夹器的底部结构示意图;图8为本技术一些实施例的密封套的结构示意图。
68.根据本技术的一些实施例,可选的,该装夹体61的一端设置有内凹的活动槽611,该装夹体61的一侧设置有贯穿至活动槽611的导孔612,该装夹器63穿过导孔612嵌入活动槽611内,并相对固定装夹器62移动。活动槽611与导孔612的设置,可限制装夹器63在装夹体61上的移动。
69.根据本技术的一些实施例,可选的,该活动槽611内设置有管体64,该管体64的一端设置有内凹的管腔641,该管体64的一侧设置有贯穿至管腔641的管孔642,该装夹器63包括活动夹板631以及滑块632,该夹板631设置于滑块632上,该滑块632嵌入活动槽611内,该滑块632对应管体64的位置贯穿有活动孔634,该活动孔634对应管孔642的位置设置有驱动
连接块635,该驱动连接块635穿过管孔642,该驱动连接块635的端部设有气缸636,该气缸636嵌入管腔641内,该管体64上设有可伸缩的密封套65,该密封套65用于密封管孔642,将管腔641的底部与气缸636形成密封空间。管腔641的底部与气缸636形成的密封空间,在气缸636相该密封空间充气或者吸气时,便可使其内部气压增大或者减小,从而驱动滑块632在管体64上进行滑动,滑块632便会带动活动夹板631相对固定装夹器62移动,从而实现装夹的作用,该驱动结构可节省空间,并减少零件的使用,使其本身具有轻盈的效果,以便于搬运。
70.根据本技术的一些实施例,可选的,该密封套65包括可伸缩的伸缩套651,该伸缩套651内表面设有凸出的密封带652,该密封带652嵌套于管孔642上,该密封带652的端部设置密封环653,该密封环653紧贴气缸636,该密封环653对应气缸636的气口贯穿有气孔654。伸缩套651的设置可使密封带652将管孔642密封住,从而使管腔641的底部与气缸636形成密封空间,以便于实现驱动的作用。
71.根据本技术的一些实施例,可选的,该活动夹板631与滑块632之间设置加强筋633。加强筋633的设置可提高活动夹板631的支撑能力。
72.参照图9-10,图9为本技术一些实施例的吸附机构的分解结构示意图;图10为本技术一些实施例的图9中的放大结构示意图。
73.根据本技术的一些实施例,可选的,该吸附主体71对应吸附副体72的侧面设有内凹的连接槽711,该连接槽711的槽底设置有向两侧内凹的限位槽712,该吸附副体72对应连接槽711的位置设置有连接条721,该连接条721对应限位槽712的位置设置有限位条722,该连接条721嵌入连接槽711内,该限位条722嵌入限位槽712内,该吸附主体71的两端分别滑动连接有卡块713,该卡块713用于将限位条722卡在限位槽712内。在与限位槽712的配合下,可限制限位条722的横向移动,并通过卡块713的设置,可限制限位条722的纵向移动,从而能够将吸附副体72固定在吸附主体71上。
74.根据本技术的一些实施例,可选的,该吸附主体71对应卡块713的位置设有内凹的滑槽714,该卡块713嵌入滑槽714内,该限位条722端部对应卡块713的位置设有内凹的卡槽723,该卡块713嵌入卡槽723内。在卡槽723的设置下,可使卡块713限制限位条722的纵向移动时,吸附主体71与吸附副体72的端部连接处能够更加平滑。
75.参照图11-12,图11为本技术一些实施例的第二轴支架与第三轴支架的分解图结构示意图;图12为本技术一些实施例的快换机构的剖面结构示意图。
76.根据本技术的一些实施例,可选的,该第三轴支架4靠近第二轴支架3的一端设置有连接柱42,该连接柱42表面设置有内凹的限位环43,该第二轴支架3对应限位环43的位置设置有快换机构9,该快换机构9包括快换壳体91,该快换壳体91固定于第二轴支架3上,该快换壳体91朝向第二轴支架3的一端设置有内凹的活动槽92,该活动槽92的槽底贯穿有活动孔93,该活动槽92内嵌套有活动杆94,该活动杆94的一端嵌入限位环43内,该活动杆94的另一端穿过活动孔93,该活动杆94上设置有推块95,该活动槽92内嵌套有弹簧96,该弹簧96的一端支撑于活动槽92的槽底,该弹簧96的另一端支撑于推块95上。在弹簧96的弹力作用下,能够将推块95朝向限位环43的方向推动,从而能够保证活动杆94嵌入限位环43内时的稳定性,通过快换机构9的设置,使得向外拉动活动杆94时,能够使活动杆94脱离限位环43,从而能够将第三轴支架4取出脱离第二轴支架3。
77.应该理解的是,本技术所公开的实施例不限于这里所公开的特定处理步骤或材料,而应当延伸到相关领域的普通技术人员所理解的此类特征的等同替代。还应当理解的是,在此使用的术语仅用于描述特定实施例的目的,而并不意味着限制。
78.说明书中提到的“实施例”意指结合实施例描述的特定特征、或特性包括在本技术的至少一个实施例中。因此,说明书通篇各个地方出现的短语或“实施例”并不一定均指同一个实施例。
79.此外,所描述的特征或特性可以任何其他合适的方式结合到一个或多个实施例中。在上面的描述中,提供一些具体的细节,例如厚度、数量等,以提供对本技术的实施例的全面理解。然而,相关领域的技术人员将明白,本技术无需上述一个或多个具体的细节便可实现或者也可采用其他方法、组件、材料等实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1