一种基于互联网服务消费的机器人的制作方法
1.本发明涉及机器人技术领域,尤其涉及一种基于互联网服务消费的机器人。
背景技术:
2.随着我国互联网科技的进步,越来越多的消费服务机器人被广泛的应用在各大商场,为消费者提供消费信息服务;
3.现有技术申请公开号为cn110962142a的中国发明专利公开了基于互联网服务消费的机器人,包括机身,所述机身前表面底端两侧均设置有防尘罩,所述机身前表面底端开设有第一安装槽,所述第一安装槽位于防尘罩两侧,所述第一安装槽内部底端设置有第一弹簧,所述第一弹簧顶端设置有第一按杆,所述第一按杆顶端设置有限制环,所述第一按杆贯穿限制环,所述限制环位于第一安装槽内部,所述第一按杆底端一侧设置有第一限制杆,所述第一限制杆一端贯穿第一安装槽,所述第一限制杆顶端一侧设置有顶头,所述顶头顶端位于防尘罩端;
4.其虽然可以实现消费信息的提供,随着消费机器人在商场的移动,容易出现无线通信信号的减弱,影响信息的传输,不利于对消费者实时提供服务,机器人在转移楼层时一般要乘坐斜面电梯或者台阶式的电梯,机器人在以上两种电梯上不稳定,容易摔倒,损毁机器人或者伤害到周围的人,现有的机器人显示高度固定,不能适应不同身高的顾客,且显示时容易反光,不利于顾客观看显示信息。
技术实现要素:
5.本发明的目的是为了解决现有技术中在实际使用时,随着消费机器人在商场的移动,容易出现无线通信信号的减弱,影响信息的传输,不利于对消费者实时提供服务,机器人在转移楼层时一般要乘坐斜面电梯或者台阶式的电梯,机器人在以上两种电梯上不稳定,容易摔倒,损毁机器人或者伤害到周围的人,现有的机器人显示高度固定,不能适应不同身高的顾客,且显示时容易反光,不利于顾客观看显示信息的问题,而提出的一种基于互联网服务消费的机器人。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种基于互联网服务消费的机器人,包括:
8.机身,底端通过转身单元连接重心控制单元,所述重心控制单元的底部安装有移动单元,且重心控制单元的底部安装有两个底固控制单元,两个底固控制单元的底部安装有底固组件;
9.供电单元,安装在机身的内部;
10.显示高度调整单元,设有两个且分别安装在机身的顶部两侧,且显示高度调整单元上安装有锁止单元,且两个显示高度调整单元远离机身的一端连接显示单元的两侧;
11.机头控制单元,包含有安装机头、弧面显示屏、托环、锥形帽、帽沿、安装内板、控制器、斜架、无线通信模块和导线,所述机身的顶部中心固定连接有空心的安装机头,所述安
装机头的顶部边沿设有托环,所述安装机头的前侧缺口处安装有弧面显示屏,所述锥形帽的底部边沿设有帽沿,所述锥形帽内固定有安装内板,所述安装内板上通过斜架安装有控制器和无线通信模块,所述控制器连接导线的一端,所述安装内板的底部通过锥形帽固定组件安装在安装机头的顶部。
12.转身单元可以方便机身转动,重心控制单元可以改变机身的中心,提高机身的稳定度,底固控制单元控制底固组件的离地高度,底固组件将机身位置固定,避免倾倒,供电单元为各个用电器件供电,方便移动,显示高度调整单元可以改变显示单元的高度,方便服务不同身高的顾客,锁止单元可以将显示高度调整单元锁止,避免显示单元高度保持时对显示高度调整单元的压力过大,显示单元可以调整显示角度,避免显示界面反光,通过锥形帽固定组件可以将安装内板固定在安装机头的顶部,通过锥形帽固定组件方便锥形帽的拆卸,方便维护安装内板上的控制器和无线通信模块,锥形帽采用胶质材料,避免干涉无线通信信号,将无线通信模块设置在顶部,方便无线信号的收发,避免通信中断,弧面显示屏可以模拟人的面部表情,提高服务温馨度,帽沿可以对顶部光线进行遮挡,避免弧面显示屏反光,同时导线可以在锥形帽从安装机头上拆掉时保持电力的供应,托环用于托住帽沿的底部。
13.优选的,所述锥形帽固定组件包含有固定块二、伸缩杆、弹簧、卡球和卡接杆,所述安装内板的底部固定连接卡接杆的顶端,所述卡接杆的底部穿过安装机头的顶部安装孔,所述卡接杆为空心杆,所述导线的另一端穿过卡接杆,所述卡接杆的底部两侧分别开设有弧形卡槽,所述安装机头的内部上侧固定有两个固定块二,两个固定块二分别通过伸缩杆连接两个卡球,所述伸缩杆上套接有弹簧,两个卡球与对应的弧形卡槽卡接。
14.将安装内板下侧的卡接杆对准安装机头的顶部安装孔,卡接杆的底端将伸缩杆和弹簧压缩,挤开两个卡球,待弧形卡槽与卡球卡接完成对安装内板和锥形帽的快速固定,用力拉锥形帽时可以克服弹簧的阻力,使卡球与弧形卡槽脱离,完成拆卸,拆卸方便快捷。
15.优选的,所述重心控制单元包含有顶盘、上活动板、下活动块、活动轴、底盘、铰接座一、电动推杆和铰接座二,所述顶盘安装在机身的底部且连接转身单元,所述顶盘的底板中心固定连接有上活动板,所述底盘的顶部中心固定连接有下活动块,所述下活动块通过活动轴活动连接上活动板,所述顶盘的底部一侧通过铰接座一活动连接电动推杆的顶端,所述电动推杆的底端通过铰接座二活动连接底盘的上侧。
16.电动推杆伸长,可以使上活动板通过活动轴相对于下活动块活动,顶盘倾斜,从而改变机身的重心,在斜面电梯上向上活动时,让机身重心向前倾斜,而在向下活动时向后仰,提高机身在斜面的稳定性。
17.优选的,所述底固控制单元包含有滑柱、上安装板、控制电机、螺纹杆、活动板、滑环、缓冲伸缩杆、缓冲弹簧和下安装板,所述底盘上开设有两个底孔,每个底孔的边沿顶部通过滑柱连接上安装板的底部,所述上安装板的上侧中心固定连接有控制电机,所述控制电机的底部输出轴连接螺纹杆的顶端,所述活动板的侧面设有与滑柱滑动连接的滑环,所述螺纹杆的中部与活动板中部螺孔螺纹连接,所述活动板的底部通过不少于两个的缓冲伸缩杆连接下安装板,所述缓冲伸缩杆上套接有缓冲弹簧,所述下安装板穿过底孔。
18.控制电机工作带动螺纹杆转动,由于螺纹作用可以带着活动板和滑环沿着滑柱上下活动,从而通过缓冲伸缩杆带动下安装板上下移动,控制改变底固组件的离地高度,缓冲
弹簧可以控制缓冲伸缩杆伸缩缓冲,帮助底固组件稳定缓慢的接触地面。
19.优选的,所述底固组件包含有负压泵、硬质气管、吸盘和电磁铁,其中一个下安装板的底部安装有电磁铁,另一个下安装板的中心贯穿设有硬质气管,所述硬质气管的底部连通吸盘,所述硬质气管的侧面安装有电磁泄压阀,所述硬质气管的顶部通过软管连接负压泵的进气口,所述负压泵安装在底盘的上侧。
20.在乘坐斜面电梯或者台阶式的电梯时,通过电磁铁可以磁性吸附在电梯上,避免乘坐电梯时不稳定而倾倒,负压泵通过硬质气管可以将吸盘抽真空,可以帮助吸附在瓷板砖的地面上,保持机器人站立稳定,通过电磁泄压阀可以对吸盘泄压,取消吸附。
21.优选的,所述显示高度调整单元包含有高度调整电机、主动齿轮、轴承一、转动空心筒、从动齿轮、转动筒、调整空心臂、线夹和线缆,所述机身的顶部两侧分别通过轴承一转动连接有转动空心筒,所述转动空心筒位于机身内的一端固定连接有从动齿轮,所述机身内顶部两侧分别设有高度调整电机,所述高度调整电机的输出轴连接主动齿轮,所述主动齿轮与从动齿轮啮合连接,所述转动空心筒位于机身外的一端固定连接有转动筒的侧面中部,所述转动筒的一侧连接调整空心臂的一端,所述调整空心臂内通过线夹固定连接线缆的一端,所述线缆的另一端从转动空心筒内穿过。
22.高度调整电机工作可以带动主动齿轮转动,主动齿轮通过从动齿轮的传动带动转动空心筒,转动空心筒可以通过转动筒带动调整空心臂前后摆动,从而调整显示单元的显示高度,线夹将线缆固定在调整空心臂内,实现电信号的连通。
23.优选的,所述锁止单元包含有固定块一、电动伸缩杆、连接头、拉杆、固定环、端面卡环和安装盘,所述机身内通过固定块一固定连接电动伸缩杆的一端,所述电动伸缩杆的另一端通过连接头连接拉杆的一端,所述拉杆的另一端穿过转动空心筒延伸至转动筒的外侧并且连接安装盘的中部,所述转动筒的外侧面安装有固定环,所述安装盘的内侧面固定有对应固定环的端面卡环,所述端面卡环靠近固定环的一侧设有摩擦纹。
24.电动伸缩杆缩短,通过连接头拉动拉杆,拉杆将安装盘拉向转动筒,端面卡环压向固定环产生摩擦力,对转动筒和调整空心臂位置固定,避免调整空心臂重力过大损坏高度调整电机。
25.优选的,所述显示单元包含有电机固定框、旋动电机、转轴、轴承二、转动块、显示安装框、显示器和操作按钮,所述电机固定框的前侧开设有方槽,方槽内两侧分别通过电机固定框固定有旋动电机,所述旋动电机的侧面输出轴连接转轴,所述转轴通过轴承二转动连接电机固定框的侧面,所述转轴的外端通过转动块连接调整空心臂的另一端,所述方槽的前侧镶嵌有显示器,所述电机固定框的底部安装有操作按钮。
26.旋动电机工作可以带动转轴转动,由于调整空心臂和转动块位置固定,所以电机固定框的角度改变,从而改变显示器的角度,避免显示器在某一角度反光,操作按钮可以控制旋动电机工作,从而改变显示角度,避开反光。
27.优选的,还包括弧形挡板、卡杆和卡孔,所述顶盘的侧面开设有卡孔,所述顶盘的侧面设有两个弧形挡板,两个弧形挡板的内侧设有卡杆,所述卡杆与卡孔卡接,两个弧形挡板构成一个遮挡重心控制单元的环形罩。卡杆与卡孔配合,对弧形挡板固定,通过弧形挡板可以遮挡住机器人的下部,避免零件外漏。
28.优选的,一种基于互联网服务消费的机器人的使用方法,具体包括以下步骤:
29.s1:通过移动单元使整个机器人移动,在经过斜坡时使用重心控制单元改变机身的倾斜度,从而改变中心,保证机身在斜坡时处于平稳状态;
30.s2:通过显示高度调整单元可以改变显示单元的高度,锁止单元可以在显示单元的高度改变后进行状态锁止;
31.s3:底固控制单元改变底固组件的高度,底固组件在机身位置不变时固定在地面;
32.s4:通过转身单元改变机身的朝向,从而改变弧面显示屏和显示单元的朝向。
33.与现有技术相比,本发明提供了一种基于互联网服务消费的机器人,具备以下有益效果:
34.1、该基于互联网服务消费的机器人,转身单元可以方便机身转动,重心控制单元可以改变机身的中心,提高机身的稳定度,底固控制单元控制底固组件的离地高度,底固组件将机身位置固定,避免倾倒,供电单元为各个用电器件供电,方便移动。
35.2、该基于互联网服务消费的机器人,显示高度调整单元可以改变显示单元的高度,方便服务不同身高的顾客,锁止单元可以将显示高度调整单元锁止,避免显示单元高度保持时对显示高度调整单元的压力过大,显示单元可以调整显示角度,避免显示界面反光。
36.3、该基于互联网服务消费的机器人,通过锥形帽固定组件可以将安装内板固定在安装机头的顶部,通过锥形帽固定组件方便锥形帽的拆卸,方便维护安装内板上的控制器和无线通信模块,锥形帽采用胶质材料,避免干涉无线通信信号,将无线通信模块设置在顶部,方便无线信号的收发,避免通信中断,弧面显示屏可以模拟人的面部表情,提高服务温馨度,帽沿可以对顶部光线进行遮挡,避免弧面显示屏反光,同时导线可以在锥形帽从安装机头上拆掉时保持电力的供应。
37.4、该基于互联网服务消费的机器人,将无线通信模块往高处安置,减小出现无线通信信号的减弱的概率,避免无线信息传输的滞后,方便为消费者提供良好的服务,乘坐斜面电梯或者台阶式的电梯时机器人行走稳定,避免摔倒,避免损毁机器人或者伤害到周围的人,显示高度可调,使用人群广,可以避免显示反光,方便顾客观看显示信息。
38.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本发明服务质量提高,便捷性功能多样。
附图说明
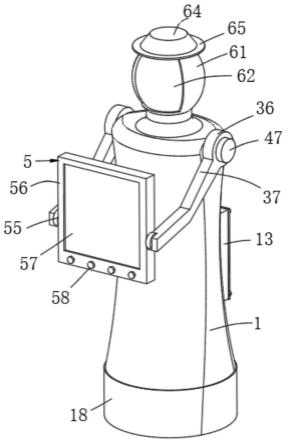
39.图1为本发明提出的一种基于互联网服务消费的机器人的结构示意图;
40.图2为本发明提出的一种基于互联网服务消费的机器人的后侧结构示意图;
41.图3为本发明提出的一种基于互联网服务消费的机器人的转身单元结构示意图;
42.图4为本发明提出的一种基于互联网服务消费的机器人的局部结构示意图;
43.图5为本发明提出的一种基于互联网服务消费的机器人的底部结构示意图;
44.图6为本发明提出的一种基于互联网服务消费的机器人的机头控制单元和锥形帽固定组件结构示意图;
45.图7为本发明提出的一种基于互联网服务消费的机器人的显示高度调整单元和锁止单元结构示意图;
46.图8为本发明提出的一种基于互联网服务消费的机器人的显示单元局部结构示意图;
47.图9为本发明提出的一种基于互联网服务消费的机器人的供电单元结构示意图。
48.图中:1机身、2供电单元、21拱形限位框、22电池框、23蓄电池、24活动座一、25活动杆、26活动座二、27缓冲滑块、28拉伸弹簧、29滑轨、210限位块、211顶缓震垫、212侧缓震块、3显示高度调整单元、31高度调整电机、32主动齿轮、33轴承一、34转动空心筒、35从动齿轮、36转动筒、37调整空心臂、38线夹、39线缆、4锁止单元、41固定块一、42电动伸缩杆、43连接头、44拉杆、45固定环、46端面卡环、47安装盘、5显示单元、51电机固定框、52旋动电机、53转轴、54轴承二、55转动块、56显示安装框、57显示器、58操作按钮、6机头控制单元、61安装机头、62弧面显示屏、63托环、64锥形帽、65帽沿、66安装内板、67控制器、68斜架、69无线通信模块、610导线、7锥形帽固定组件、71固定块二、72伸缩杆、73弹簧、74卡球、75卡接杆、8重心控制单元、81顶盘、82上活动板、83下活动块、84活动轴、85底盘、86铰接座一、87电动推杆、88铰接座二、9底固控制单元、91滑柱、92上安装板、93控制电机、94螺纹杆、95活动板、96滑环、97缓冲伸缩杆、98缓冲弹簧、99下安装板、10底固组件、101负压泵、102硬质气管、103吸盘、104电磁铁、11转身单元、111轴承三、112转身轴、113锥齿轮一、114锥齿轮二、115转身电机、12移动单元、121轴承四、122舵轴、123齿轮一、124转动电机、125齿轮二、126动力轮、127安装梁、128安装轮架、129动力电机、13安装口、14盖板、15拆卸螺栓、16usb接口、17充电口、18弧形挡板、19卡杆、20卡孔。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
50.实施例:
51.实施例一,参照图1-9,一种基于互联网服务消费的机器人,包括:
52.机身1,底端通过转身单元11连接重心控制单元8,重心控制单元8的底部安装有移动单元12,且重心控制单元8的底部安装有两个底固控制单元9,两个底固控制单元9的底部安装有底固组件10;
53.重心控制单元8包含有顶盘81、上活动板82、下活动块83、活动轴84、底盘85、铰接座一86、电动推杆87和铰接座二88,顶盘81安装在机身1的底部且连接转身单元11,顶盘81的底板中心固定连接有上活动板82,底盘85的顶部中心固定连接有下活动块83,下活动块83通过活动轴84活动连接上活动板82,顶盘81的底部一侧通过铰接座一86活动连接电动推杆87的顶端,电动推杆87的底端通过铰接座二88活动连接底盘85的上侧。
54.电动推杆87伸长,可以使上活动板82通过活动轴84相对于下活动块83活动,顶盘81倾斜,从而改变机身1的重心,在斜面电梯上向上活动时,让机身1重心向前倾斜,而在向下活动时向后仰,提高机身1在斜面的稳定性。
55.底固控制单元9包含有滑柱91、上安装板92、控制电机93、螺纹杆94、活动板95、滑环96、缓冲伸缩杆97、缓冲弹簧98和下安装板99,底盘85上开设有两个底孔,每个底孔的边沿顶部通过滑柱91连接上安装板92的底部,上安装板92的上侧中心固定连接有控制电机93,控制电机93的底部输出轴连接螺纹杆94的顶端,活动板95的侧面设有与滑柱91滑动连接的滑环96,螺纹杆94的中部与活动板95中部螺孔螺纹连接,活动板95的底部通过不少于两个的缓冲伸缩杆97连接下安装板99,缓冲伸缩杆97上套接有缓冲弹簧98,下安装板99穿
过底孔。
56.控制电机93工作带动螺纹杆94转动,由于螺纹作用可以带着活动板95和滑环96沿着滑柱91上下活动,从而通过缓冲伸缩杆97带动下安装板99上下移动,控制改变底固组件10的离地高度,缓冲弹簧98可以控制缓冲伸缩杆97伸缩缓冲,帮助底固组件10稳定缓慢的接触地面。
57.底固组件10包含有负压泵101、硬质气管102、吸盘103和电磁铁104,其中一个下安装板99的底部安装有电磁铁104,另一个下安装板99的中心贯穿设有硬质气管102,硬质气管102的底部连通吸盘103,硬质气管102的侧面安装有电磁泄压阀,硬质气管102的顶部通过软管连接负压泵101的进气口,负压泵101安装在底盘85的上侧。
58.在乘坐斜面电梯或者台阶式的电梯时,通过电磁铁104可以磁性吸附在电梯上,避免乘坐电梯时不稳定而倾倒,负压泵101通过硬质气管102可以将吸盘103抽真空,可以帮助吸附在瓷板砖的地面上,保持机器人站立稳定,通过电磁泄压阀可以对吸盘103泄压,取消吸附。
59.供电单元2,安装在机身1的内部;
60.显示高度调整单元3,设有两个且分别安装在机身1的顶部两侧,且显示高度调整单元3上安装有锁止单元4,且两个显示高度调整单元3远离机身1的一端连接显示单元5的两侧;
61.显示高度调整单元3包含有高度调整电机31、主动齿轮32、轴承一33、转动空心筒34、从动齿轮35、转动筒36、调整空心臂37、线夹38和线缆39,机身1的顶部两侧分别通过轴承一33转动连接有转动空心筒34,转动空心筒34位于机身1内的一端固定连接有从动齿轮35,机身1内顶部两侧分别设有高度调整电机31,高度调整电机31的输出轴连接主动齿轮32,主动齿轮32与从动齿轮35啮合连接,转动空心筒34位于机身1外的一端固定连接有转动筒36的侧面中部,转动筒36的一侧连接调整空心臂37的一端,调整空心臂37内通过线夹38固定连接线缆39的一端,线缆39的另一端从转动空心筒34内穿过。
62.高度调整电机31工作可以带动主动齿轮32转动,主动齿轮32通过从动齿轮35的传动带动转动空心筒34,转动空心筒34可以通过转动筒36带动调整空心臂37前后摆动,从而调整显示单元5的显示高度,线夹38将线缆39固定在调整空心臂37内,实现电信号的连通。
63.锁止单元4包含有固定块一41、电动伸缩杆42、连接头43、拉杆44、固定环45、端面卡环46和安装盘47,机身1内通过固定块一41固定连接电动伸缩杆42的一端,电动伸缩杆42的另一端通过连接头43连接拉杆44的一端,拉杆44的另一端穿过转动空心筒34延伸至转动筒36的外侧并且连接安装盘47的中部,转动筒36的外侧面安装有固定环45,安装盘47的内侧面固定有对应固定环45的端面卡环46,端面卡环46靠近固定环45的一侧设有摩擦纹。
64.电动伸缩杆42缩短,通过连接头43拉动拉杆44,拉杆44将安装盘47拉向转动筒36,端面卡环46压向固定环45产生摩擦力,对转动筒36和调整空心臂37位置固定,避免调整空心臂37重力过大损坏高度调整电机31。
65.显示单元5包含有电机固定框51、旋动电机52、转轴53、轴承二54、转动块55、显示安装框56、显示器57和操作按钮58,电机固定框51的前侧开设有方槽,方槽内两侧分别通过电机固定框51固定有旋动电机52,旋动电机52的侧面输出轴连接转轴53,转轴53通过轴承二54转动连接电机固定框51的侧面,转轴53的外端通过转动块55连接调整空心臂37的另一
端,方槽的前侧镶嵌有显示器57,电机固定框51的底部安装有操作按钮58。
66.旋动电机52工作可以带动转轴53转动,由于调整空心臂37和转动块55位置固定,所以电机固定框51的角度改变,从而改变显示器57的角度,避免显示器57在某一角度反光,操作按钮58可以控制旋动电机52工作,从而改变显示角度,避开反光。
67.还包括弧形挡板18、卡杆19和卡孔20,顶盘81的侧面开设有卡孔20,顶盘81的侧面设有两个弧形挡板18,两个弧形挡板18的内侧设有卡杆19,卡杆19与卡孔20卡接,两个弧形挡板18构成一个遮挡重心控制单元8的环形罩。卡杆19与卡孔20配合,对弧形挡板18固定,通过弧形挡板18可以遮挡住机器人的下部,避免零件外漏。
68.机头控制单元6,包含有安装机头61、弧面显示屏62、托环63、锥形帽64、帽沿65、安装内板66、控制器67、斜架68、无线通信模块69和导线610,机身1的顶部中心固定连接有空心的安装机头61,安装机头61的顶部边沿设有托环63,安装机头61的前侧缺口处安装有弧面显示屏62,锥形帽64的底部边沿设有帽沿65,锥形帽64内固定有安装内板66,安装内板66上通过斜架68安装有控制器67和无线通信模块69,控制器67连接导线610的一端,安装内板66的底部通过锥形帽固定组件7安装在安装机头61的顶部,安装机头61的后侧设有usb接口16,usb接口16连接控制器67,方便交换数据。
69.锥形帽固定组件7包含有固定块二71、伸缩杆72、弹簧73、卡球74和卡接杆75,安装内板66的底部固定连接卡接杆75的顶端,卡接杆75的底部穿过安装机头61的顶部安装孔,卡接杆75为空心杆,导线610的另一端穿过卡接杆75,卡接杆75的底部两侧分别开设有弧形卡槽,安装机头61的内部上侧固定有两个固定块二71,两个固定块二71分别通过伸缩杆72连接两个卡球74,伸缩杆72上套接有弹簧73,两个卡球74与对应的弧形卡槽卡接。
70.将安装内板66下侧的卡接杆75对准安装机头61的顶部安装孔,卡接杆75的底端将伸缩杆72和弹簧73压缩,挤开两个卡球74,待弧形卡槽与卡球74卡接完成对安装内板66和锥形帽64的快速固定,用力拉锥形帽64时可以克服弹簧73的阻力,使卡球74与弧形卡槽脱离,完成拆卸,拆卸方便快捷。
71.转身单元11可以方便机身1转动,重心控制单元8可以改变机身1的中心,提高机身1的稳定度,底固控制单元9控制底固组件10的离地高度,底固组件10将机身1位置固定,避免倾倒,供电单元2为各个用电器件供电,方便移动,显示高度调整单元3可以改变显示单元5的高度,方便服务不同身高的顾客,锁止单元4可以将显示高度调整单元3锁止,避免显示单元5高度保持时对显示高度调整单元3的压力过大,显示单元5可以调整显示角度,避免显示界面反光,通过锥形帽固定组件7可以将安装内板66固定在安装机头61的顶部,通过锥形帽固定组件7方便锥形帽64的拆卸,方便维护安装内板66上的控制器67和无线通信模块69,锥形帽64采用胶质材料,避免干涉无线通信信号,将无线通信模块69设置在顶部,方便无线信号的收发,避免通信中断,弧面显示屏62可以模拟人的面部表情,提高服务温馨度,帽沿65可以对顶部光线进行遮挡,避免弧面显示屏62反光,同时导线610可以在锥形帽64从安装机头61上拆掉时保持电力的供应,托环63用于托住帽沿65的底部。
72.一种基于互联网服务消费的机器人的使用方法,具体包括以下步骤:
73.s1:通过移动单元12使整个机器人移动,在经过斜坡时使用重心控制单元8改变机身1的倾斜度,从而改变中心,保证机身1在斜坡时处于平稳状态;
74.s2:通过显示高度调整单元3可以改变显示单元5的高度,锁止单元4可以在显示单
元5的高度改变后进行状态锁止;
75.s3:底固控制单元9改变底固组件10的高度,底固组件10在机身1位置不变时固定在地面;
76.s4:通过转身单元11改变机身1的朝向,从而改变弧面显示屏62和显示单元5的朝向。
77.实施例二,参照图1-9,一种基于互联网服务消费的机器人,本实施例是对实施例一的进一步说明;
78.转身单元11包含有轴承三111、转身轴112、锥齿轮一113、锥齿轮二114和转身电机115,机身1内底部中心通过轴承三111转动连接有转身轴112,转身轴112的底端连接顶盘81的中心,转身轴112的顶部连接锥齿轮一113,机身1内底部设有转身电机115,转身电机115的输出轴连接锥齿轮二114,锥齿轮二114与锥齿轮一113啮合连接,转身电机115工作通过锥齿轮二114与锥齿轮一113的啮合传动可以使机身1相对于顶盘81转动,实现顶盘81的转身。
79.实施例三,参照图1-9,一种基于互联网服务消费的机器人,本实施例是对实施例一的进一步说明;
80.移动单元12包含有轴承四121、舵轴122、齿轮一123、转动电机124、齿轮二125、动力轮126、安装梁127、安装轮架128和动力电机129,底盘85的一侧通过轴承四121转动连接有舵轴122,舵轴122的底端安装有舵轮,舵轴122的顶部连接齿轮一123,底盘85上设有转动电机124,转动电机124的输出轴连接齿轮二125,齿轮二125与齿轮一123啮合连接,底盘85的另一侧通过螺钉固定有安装梁127,安装梁127的顶部两端通过安装轮架128转动连接有动力轮126,动力轮126连接安装轮架128侧面的动力电机129输出轴,通过动力电机129提供动力带动动力轮126转动,推着机器人活动,转动电机124工作通过齿轮二125与齿轮一123的传动改变舵轮朝向,从而控制移动方向。
81.实施例四,参照图1-9,一种基于互联网服务消费的机器人,本实施例是对实施例一的进一步说明;
82.供电单元2包含有拱形限位框21、电池框22、蓄电池23、活动座一24、活动杆25、活动座二26、缓冲滑块27、拉伸弹簧28、滑轨29、限位块210、顶缓震垫211和侧缓震块212,机身1的内部固定有拱形限位框21,拱形限位框21内设有电池框22,电池框22内安装有蓄电池23,且电池框22的底部设有两个活动座一24,每个活动座一24分别与两个活动杆25的顶部活动连接,两个活动杆25的底部分别通过活动座二26活动连接两个缓冲滑块27,两个缓冲滑块27之间通过拉伸弹簧28连接,缓冲滑块27的底部与滑轨29滑动连接,滑轨29固定在机身1的内部且两端分别固定有限位块210,竖向震动产生时,两个缓冲滑块27在滑轨29上相互远离,通过拉伸弹簧28缓冲震动,限位块210避免缓冲滑块27与滑轨29脱离,电池框22的两侧分别设有侧缓震块212,且电池框22的顶部设有顶缓震垫211,避免侧向和顶部的磕碰,避免损坏到蓄电池23,蓄电池23为各个用电器件供电,机身1的后侧设有对应电池框22的安装口13。安装口13外端四角通过拆卸螺栓15连接盖板14,方便蓄电池23的维护和更换,且机身1的后侧设有充电口17,通过充电口17方便给带有充电电路的蓄电池23充电。
83.值得注意的,以上实施例中控制器67采用plc控制器,控制器67控制高度调整电机31、电动伸缩杆42、旋动电机52、显示器57、弧面显示屏62、无线通信模块69、电动推杆87、控
制电机93、负压泵101、电磁铁104、转身电机115、电磁泄压阀、转动电机124和动力电机129工作采用现有技术中常用的方法,以上电机均采用伺服电机。
84.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1