一种三轴自动对焦的防抖潜望马达的制作方法
1.本实用新型涉及镜头马达的技术领域,特别涉及一种三轴自动对焦的防抖潜望马达。
背景技术:
2.音圈马达是一种利用来自永久磁钢的磁场与通电线圈导体产生的磁场中磁极间的相互作用产生有规律的运动的装置,广泛用于手机摄像头等电子装置中。随着科技的发展,现今许多电子装置(例如平板计算机或智能型手机)皆具有照相或录像的功能。通过长焦距镜头系统的设置,用户可以拍出不同效果的照片,使得具有长焦距的镜头系统的电子装置也逐渐受到大众的喜爱。
3.当需要将焦距较长的镜头设置于前述电子装置中时,会造成电子装置厚度的增加,不利于电子装置的轻薄化,而且现有底座上功能性单一,在于外壳安装时对准精度差。因此一般是在镜头系统中设置反射组件(棱镜马达),通过反射方式将入射光导向镜头系统中的感测组件上。通过这样的配置,可以减少电子装置的厚度。然而,当电子装置受到晃动时,入射光抵达感测组件上的位置可能会偏移到一预定位置外,导致镜头系统所产生的成像不清楚。另外目前潜望式相机结构利用棱镜马达的旋转加上潜望式马达的两个方向移动来实现三轴运动控制的目的,但问题在于棱镜马达的旋转会造成成像暗角,以及两个部件因为运动方式差异造成的控制问题,因此相对位置的尺寸精度要求更加苛刻,加工和组装难度增加,或会造成制造成本和组装成本的增加。
技术实现要素:
4.针对现有技术中存在的不足之处,本实用新型的目的是提供一种三轴自动对焦的防抖潜望马达,使得该马达整体集成度高,便于集中检测,避免出现技术暗角情况,满足高质量摄像头的要求,同时降低工装和加工的难度,大大降低成本。为了实现根据本实用新型的上述目的和其他优点,提供了一种三轴自动对焦的防抖潜望马达,包括:
5.底座、设置于所述底座上的框架、设置于所述底座内的载体及与所述底座相嵌合的外壳;
6.所述框架内侧面上设置有y轴驱动组件,框架上远离y轴驱动组件的侧面上设置有x轴驱动组件,框架靠近底座的一端面上设置有z 轴驱动组件;
7.所述底座包括底板、固定于所述底板上的多个导向立柱及设置于每个导向立柱之间的线圈固定柱,所述底板的中间部位开设有载体避让槽;
8.所述z轴驱动组件60相贴设置有z轴闭环电路组件,所述载体 40上贴附有y轴闭环电路组件,所述z轴闭环电路组件包括z轴电路板及设置于所述z轴电路板上的z轴霍尔芯片与x轴霍尔芯片,所述y轴闭环电路组件包括y轴电路板及设置于所述y轴电路板上的y 轴霍尔芯片。
9.优选的,所述y轴驱动组件包括第一y轴驱动件及与所述第一y 轴驱动件间隔且平
行设置的第二y轴驱动件,所述第一y轴驱动件与第二y轴驱动件的结构相同。
10.优选的,所述第一y轴驱动件包括贴附设置于框架内壁上的y轴驱动磁石及与与y轴驱动磁间隔设置的y轴驱动线圈,所述y轴驱动线圈缠绕于载体外侧面上。
11.优选的,所述x轴驱动组件包括第一x轴驱动件及与所述第一x 轴驱动件间隔且平行设置的第二x轴驱动件,且所述第一x轴驱动与第二x轴驱动件的结构相同。
12.优选的,所述第一x轴驱动件包括镶嵌于所述框架外侧面上的x 轴驱动磁石及与所述x轴驱动磁石对向设置的x驱动线圈,所述x 驱动线圈贴附设置于底座的内壁上。
13.优选的,所述z轴驱动组件包括第一z轴驱动件及与所述第一z 轴驱动件间隔且平行设置的第二z轴驱动件,且所述第一z轴驱动与第二z轴驱动件的结构相同。
14.优选的,所述第一z轴驱动件包括镶嵌于框架靠近底座端面上的 z轴驱动磁石及与所述z轴驱动磁石对向设置的z轴驱动线圈,所述 z轴驱动线圈缠绕于所述底座上。
15.优选的,所述框架上端面上固定有第一弹簧组件,且框架靠近底座端面上固定有第二弹簧组件,所述第一弹簧组件一端固定于框架上,另一端固定于载体上端面上,所述第二弹簧组件一端固定于框架上,另一端固定于载体下端面上。
16.优选的,所述第一弹簧组件包括多个第一弹簧,所述第一弹簧固定于框架上端面的边角处,每个所述第一弹簧之间间隔设置且结构相同。
17.优选的,所述第一弹簧包括固定于框架上的固定主板、与所述固定主板一端通过固定板连接的第一载体固定板及与所述固定主板另一端通过弹簧链连接的悬针固定座,所述第一载体固定板固定于载体上。
18.优选的,所述第二弹簧组件包括固定于框架上的第二弹簧及与所述第二弹簧平行且间固定于框架上的第三弹簧,所述第二弹簧与第三弹簧的结构相同。
19.优选的,所述第二弹簧包括固定于载体上的第二载体固定板及分别一体式连接于第二载体固定板两端上的第二弹簧链,所述第二弹簧链上固接有框架固定板,所述框架固定板固定于框架上。
20.优选的,所述外壳包括一平面板及沿所述平面板边沿向竖直方向延伸的挡板,外壳一挡板上开设有让位区间,且外壳上与所述让位区间相对的一挡板上开设有摄像孔。
21.优选的,所述底座上设置有四个悬丝,所述悬丝一端贯穿底座,另一端沿竖直方向延伸且延伸至第一弹簧组件上,每个悬丝分别一一对应第一弹簧。
22.优选的,所述z轴驱动组件相贴设置有z轴闭环电路组件,所述载体上贴附有y轴闭环电路组件,所述z轴闭环电路组件包括z轴电路板及设置于所述z轴电路板上的z轴霍尔芯片与x轴霍尔芯片,所述y轴闭环电路组件包括y轴电路板及设置于所述y轴电路板上的y 轴霍尔芯片。
23.优选的,每个第一焊盘一侧设置有点胶凸台,所述点胶凸台的一侧开设有悬丝插孔,每个悬丝插孔中插入有悬丝。
24.优选的,所述底板一侧边一体式连接有棱镜马达安装板,且底板靠近棱镜马达安装板一端上固接有限位块。
25.本实用新型与现有技术相比,其有益效果是:通过底座使得z轴驱动组件全部安装于底座上,使得该马达整体结构更加紧凑,y轴驱动组件与z轴驱动组件中驱动线圈通过底座上的第一焊接盘与第二焊接盘焊接通电,而且底座上的导向立柱使得外壳在安装时更加
精准快速,而且通过y轴驱动组件、x轴驱动组件及z轴驱动组件的三轴驱动控制,具有对焦精准度及有对焦更快、功耗更低等特点,而且该三轴驱动控制均设置于马达上,简化了棱镜马达的结构,对于产品特性检测以及部分控制都可简化其要求,因此,使装置整体的集成度得以提高,便于特性和故障的集中检测、验证;取消棱镜马达的运动,避免现有技术暗角情况的出现;整体装置加工和组装难度降低,也降低了开模等制造成本,位于y轴驱动组件、x轴驱动组件及z轴驱动组件驱动中的驱动磁石同时起到霍尔感应的作用,不仅克服了常规防抖马达结构中常常遇到的驱动磁石与霍尔磁石磁性相互间磁气干扰的问题,成功实现了三轴防抖控制的构架和功能,同时赋予了马达整体更为宽松的尺寸设计空间。由于降低了部品点数,在一定程度上节约了成本,在组装上也更为容易简单。
附图说明
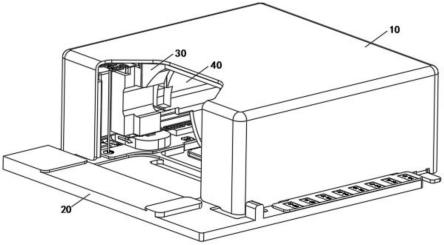
26.图1为根据本实用新型的三轴自动对焦的防抖潜望马达的三维结构示意图;
27.图2为根据本实用新型的三轴自动对焦的防抖潜望马达的三维爆炸结构示意图;
28.图3为根据本实用新型的三轴自动对焦的防抖潜望马达的第二弹簧组件的三维结构示意图;
29.图4为根据本实用新型的三轴自动对焦的防抖潜望马达的底座的三维结构示意图。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.参照图1-4,一种三轴自动对焦的防抖潜望马达,包括:底座20、设置于所述底座20上的框架30、设置于所述底座20内的载体40及与所述底座20相嵌合的外壳10;所述框架30内侧面上设置有y轴驱动组件100,框架30上远离y轴驱动组件100的侧面上设置有x 轴驱动组件50,框架30靠近底座20的一端面上设置有z轴驱动组件60;所述底座20包括底板22、固定于所述底板22上的多个导向立柱23及设置于每个导向立柱23之间的线圈固定柱212,所述底板 22的中间部位开设有载体避让槽27;所述z轴驱动组件60相贴设置有z轴闭环电路组件,所述载体40上贴附有y轴闭环电路组件,所述z轴闭环电路组件包括z轴电路板及设置于所述z轴电路板上的z 轴霍尔芯片与x轴霍尔芯片,通过y轴电路板及z轴电路板上设置有三个霍尔芯片与三个电容,z轴霍尔芯片,通过对对向设置的驱动磁石磁场强弱感应来反馈和演算镜头在z轴方向的驱动位置,并进一步通过向z轴驱动线圈输入电流的大小来控制镜头达到图像最清晰的位置点(z轴自动对焦)。而x、y轴霍尔芯片则通过磁场强弱感应来反馈和演算镜头在x、y轴方向上的位置抖动偏位,并进一步通过向 x、y轴驱动线圈输入一定电流大小来调整和纠正镜头的偏位,以此达到防抖的目的(x、y轴防抖),所述z轴电路为pcb板,所述y轴闭环电路组件80包括y轴电路板及设置于所述y轴电路板上的y轴霍尔芯片,在使用时y轴电路板与z轴电路板相连接,通过y轴电路板与z轴电路板相连接的方式使得马达快速精准对焦、和图像防抖,成像更清晰,符合轻薄、高质量摄像头的拍摄要求,所述y轴电
路板为fcb板,所述fcb板包括一平面段及与所述平面段两端一体式固接的侧向段,所述侧向段沿竖直方向延伸,且所述侧与载体40侧面相贴附,通过该y轴驱动组件100、x轴驱动组件5及z轴驱动组件60 构成三轴控制该马达可以在三轴上位置移动,且该三个驱动组件均位于马达上,简化了棱镜马达的结构,对于产品特性检测以及部分控制都可简化其要求,因此,使装置整体的集成度得以提高,便于特性和故障的集中检测、验证;取消棱镜马达的运动,避免现有技术暗角情况的出现;整体装置加工和组装难度降低,也降低了开模等制造成本,而且通过该y轴驱动组件100、x轴驱动组件5及z轴驱动组件60三轴闭环控制,使得该马达具有对焦精准度及有对焦更快、功耗更低等特点。
32.进一步的,所述y轴驱动组件100包括第一y轴驱动件及与所述第一y轴驱动件间隔且平行设置的第二y轴驱动件,所述第一y轴驱动件与第二y轴驱动件的结构相同,所述第一y轴驱动件包括贴附设置于框架30内壁上的y轴驱动磁石及与与y轴驱动磁对向设置的y 轴驱动线圈,当y轴驱动线圈通入电流后,y轴驱动线圈与y轴驱动磁石之间就会产生电磁力,根据弗莱明左手法则,由于电磁力的作用驱使y轴动子沿y轴方向作直线移动,即使载体40最终停留于y轴驱动线圈与y轴驱动磁石之间产生的电磁力与第一弹簧组件90、第二弹簧组件70的弹性力的合力达到相均衡状态时的位置点。通过向 y轴驱动线圈通入既定的电流,可控制绕线载体移动量,达到调整和纠正镜头的偏位,以此达到防抖的目的,所述y轴驱动线圈缠绕于载体40外侧面上,该y轴驱动磁石同时起到霍尔感应的作用,不仅克服了常规防抖马达结构中常常遇到的驱动磁石与霍尔磁石磁性相互间磁气干扰的问题,成功实现了三轴防抖控制的构架和功能,同时赋予了马达整体更为宽松的尺寸设计空间。由于降低了部品点数,在一定程度上节约了成本,在组装上也更为容易简单。
33.进一步的,所述x轴驱动组件50包括第一x轴驱动件及与所述第一x轴驱动件隔且平行设置的第二x轴驱动件,且所述第一x轴驱动与第二x轴驱动件的结构相同,所述第一x轴驱动件包括镶嵌于所述框架30外侧面上的x轴驱动磁石及与所述x轴驱动磁石对向设置的x轴驱动线圈,当x轴驱动线圈通入电流后,x轴驱动线圈与x轴驱动磁石之间就会产生电磁力,根据弗莱明左手法则,由于电磁力的作用驱使x轴动子沿x轴方向作直线移动,即使绕线载体最终停留于 x轴驱动线圈与x轴驱动磁石之间产生的电磁力与四角悬丝的弹性力的合力达到相均衡状态时的位置点。通过向x轴环状线圈通入既定的电流,可控制绕线载体移动量,达到调整和纠正镜头的偏位,以此达到防抖的目的,所述x驱动线圈贴附设置于底座20的内壁上,该x 轴驱动磁石同时起到霍尔感应的作用,不仅克服了常规防抖马达结构中常常遇到的驱动磁石与霍尔磁石磁性相互间磁气干扰的问题,成功实现了三轴防抖控制的构架和功能,同时赋予了马达整体更为宽松的尺寸设计空间。由于降低了部品点数,在一定程度上节约了成本,在组装上也更为容易简单。
34.进一步的,所述z轴驱动组件60包括第一z轴驱动件及与所述第一z轴驱动件间隔且平行设置的第二z轴驱动件,且所述第一z轴驱动与第二z轴驱动件的结构相同,所述第一z轴驱动件包括镶嵌于框架30靠近底座20端面上的z轴驱动磁石及与所述z轴驱动磁石对向设置的z轴驱动线圈,当z轴驱动线圈通入电流后,z轴驱动线圈与z轴驱动磁石之间就会产生电磁力,根据弗莱明左手法则,由于电磁力的作用驱使z轴动子沿镜头光轴方向(即z轴)作直线移动,即使绕线载体最终停留z轴于驱动线圈与z轴驱动磁石之间产生的电磁力与四角悬丝的弹性力的合力达到相均衡状态时的位置点。通过向z 轴驱动线圈通入既定的电
流,可控制使绕线载体移动至目标位置,从而达到自动调焦的目的。所述z轴驱动线圈缠绕于所述底座20上,该z轴驱动磁石同时起到霍尔感应的作用,不仅克服了常规防抖马达结构中常常遇到的驱动磁石与霍尔磁石磁性相互间磁气干扰的问题,成功实现了三轴防抖控制的构架和功能,同时赋予了马达整体更为宽松的尺寸设计空间。由于降低了部品点数,在一定程度上节约了成本,在组装上也更为容易简单。
35.进一步的,所述框架30上端面上固定有第一弹簧组件90,且框架30靠近底座20端面上固定有第二弹簧组件70,所述第一弹簧组件90一端固定于框架30上,另一端固定于载体40上端面上,所述第二弹簧组件70一端固定于框架30上,另一端固定于载体40下端面上。
36.进一步的,所述第一弹簧组件90包括多个第一弹簧91,所述第一弹簧91固定于框架30上端面的边角处,每个所述第一弹簧91之间间隔设置且结构相同,所述第一弹簧91包括固定于框架30上的固定主板911、与所述固定主板911一端通过固定板连接的第一载体固定板913及与所述固定主板911另一端通过弹簧链连接的悬针固定座 912,所述第一载体固定板913固定于载体40上。
37.进一步的,所述第二弹簧组件70包括固定于框架30上的第二弹簧71及与所述第二弹簧71平行且间固定于框架30上的第三弹簧,所述第二弹簧71与第三弹簧的结构相同,所述第二弹簧71包括固定于载体40上的第二载体固定板711及分别一体式连接于第二载体固定板711两端上的第二弹簧链,所述第二弹簧链上固接有框架固定板 712,所述框架固定板712固定于框架30上。
38.进一步的,所述外壳10包括一平面板11及沿所述平面板11边沿向竖直方向延伸的挡板12,外壳10一挡板12上开设有让位区间,且外壳10上与所述让位区间相对的一挡板12上开设有摄像孔。
39.进一步的,所述底座20上设置有四个悬丝21,所述悬丝21一端贯穿底座20,另一端沿竖直方向延伸且延伸至第一弹簧组件90上,每个悬丝21分别一一对应第一弹簧91,所述四个悬丝21的电流分为两进两出,且所述悬丝21电流进出方向通过z轴电路板上走线决定。
40.这里说明的设备数量和处理规模是用来简化本实用新型的说明的,对本实用新型的应用、修改和变化对本领域的技术人员来说是显而易见的。
41.尽管本实用新型的实施方案已公开如上,但其并不仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1