可感测低频力与高频力的力感测装置的制作方法
1.本发明涉及一种可同时感测低频作用力与高频作用力的力感测装置。
背景技术:
2.工件在被加工时,工件所承受的力量,通常会包含多个不同频率的力量,例如低频的进给力及高频的切削力。进给力是刀具自工件表面往工件内部推抵的力量,通常属于低频力。切削力是刀具切削工件的力量,通常属于高频力。
3.进行加工的过程中,有时会发生实际加工情况与预测加工情况有差异的情形。因此,加工过程中需对制作工艺中的进给力及切削力进行即时监控,同步掌握进给力及切削力的变异的信息,作为后续补偿控制与健康诊断的依据。
技术实现要素:
4.有鉴于以上的问题,本发明提出一种可感测低频力与高频力的力感测装置。本发明的力感测装置通过使一感测部与另一感测部具有不同共振频率的设计,可使一感测部在承受一低频的作用力时会产生较大的振幅,且使另一感测部在承受另一高频的作用力时会产生较大的振幅。因此,本发明提出的力感测装置能同时灵敏地感测出多个不同频率的作用力。
5.本发明的一实施例提出一种力感测装置,包括一中央部、至少一固定部、至少一第一感测部、一第二感测部、至少一第一机电元件及至少一第二机电元件。中央部可承受一第一力量及一第二力量,其中第一力量的一第一频率低于第二力量的一第二频率。至少一第一感测部具有一第一自然频率,其中至少一第一感测部连接中央部。第二感测部具有一第二自然频率,其中第二感测部连接至少一第一感测部且连接固定部。至少一第一机电元件设置于至少一第一感测部且用以感测至少一第一感测部的第一振幅。至少一第二机电元件设置于第二感测部且用以感测第二感测部的第二振幅。当中央部承受第一力量时,第一振幅大于第二振幅,当中央部承受第二力量时,第一振幅小于第二振幅。
6.根据本发明的一实施例的力感测装置,在中央部承受较低频的第一力量时,第一感测部会产生较大的第一振幅,以提升感测第一力量时的灵敏度。此外,本发明的一实施例的力感测装置,在中央部承受较高频的第二力量时,第二感测部会产生较大的第二振幅,以提升感测第二力量时的灵敏度。因此,本发明的一实施例的力感测装置可借着准确地同时感测低频的第一力量及高频的第二力量,进而可供控制模块对制作工艺中所产生的进给力与切削力的变异进行即时监控,并提供后续的补偿控制与健康诊断。
7.以上的关于本发明内容的说明及以下的实施方式的说明是用以示范与解释本发明的精神与原理,并且提供本发明的权利要求更进一步的解释。
附图说明
8.图1为本发明的一实施例的加工系统的立体示意图;
9.图2为图1的加工系统的立体分解示意图;
10.图3为图2的加工系统中的力感测装置的部分的立体示意图;
11.图4为图3的力感测装置的部分的俯视示意图;
12.图5为图4的力感测装置的部分沿v-v线剖面的侧视剖面示意图;
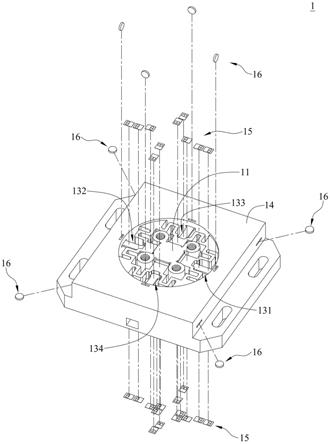
13.图6为图2的加工系统中的力感测装置的立体分解示意图;
14.图7为图6的力感测装置的仰视示意图;
15.图8为图6的力感测装置的俯视示意图。
16.符号说明
17.100
…
加工系统
[0018]1…
力感测装置
[0019]
11
…
中央部
[0020]
121、122
…
固定部
[0021]
131、132、133、134
…
第一感测部
[0022]
1311、1321、1331、1341
…
扭转部
[0023]
1312、1322、1332、1342
…
弹性部
[0024]
1313、1314、1323、1324、1333、1334、1343、1344
…
支撑部
[0025]
14
…
第二感测部
[0026]
141、142、143、144、145、146、147、148
…
凹槽
[0027]
15、1511、1512、1513、1514、1521a、1521b、1522a、1522b、1523a、1523b、1524a、1524b、1531a、1531b、1532a、1532b、1533a、1533b、1534a、1534b、1541a、1541b、1542a、1542b
…
第一机电元件
[0028]
16、161、162、163、164、165、166、167、168
…
第二机电元件
[0029]2…
工件载台
[0030]
20
…
螺钉
[0031]3…
信号处理模块
[0032]4…
底盖
[0033]
d1
…
第一轴向
[0034]
d2
…
第二轴向
[0035]
n
…
法向量
[0036]
p1、p3
…
内端点
[0037]
p2、p4
…
外端点
[0038]
t1、t2、t3
…
厚度
具体实施方式
[0039]
以下在实施方式中详细叙述本发明的实施例的详细特征,其内容足以使任何本领域中具通常知识者了解本发明的实施例的技术内容并据以实施,且根据本说明书所揭露的内容、权利要求及附图,任何本领域中具通常知识者可轻易地理解本发明。以下的实施例是进一步详细说明本发明,但非用以限制本发明的范畴。
[0040]
在本说明书的所谓的示意图中,由于用以说明而可有其尺寸、比例及角度等较为
夸张的情形,但并非用以限定本发明。在未违背本发明要旨的情况下能够有各种变更。实施例及附图的描述中所提及的上下前后方位为用以说明,而并非用以限定本发明。
[0041]
请参照图1及图2。图1绘示依照本发明的一实施例的加工系统的立体示意图。图2绘示依照图1的加工系统的立体分解示意图。
[0042]
在本实施例中,加工系统100包括一力感测装置1、一工件载台2、一信号处理模块3及一底盖4。力感测装置1可同时感测低频力与高频力。工件载台2可通过多个螺钉20锁固于力感测装置1。信号处理模块3设置于力感测装置1的一侧,且电连接于力感测装置1。底盖4设置于力感测装置1的底部。
[0043]
工件载台2可载置预计被加工的工件。当工件被加工时,工件所承受的力量可传递至工件载台2,工件载台2所承受的力量可传递至力感测装置1。力感测装置1可感测所承受的力量。信号处理模块3可处理力感测装置1所感测的信号,以得知力感测装置1所承受的力量的类型与大小,使控制模块可对工件所承受的切削力与进给力进行即时监控,同步掌握进给力及切削力的变异的信息并提供后续的补偿控制与健康诊断。
[0044]
请参照图2、图3、图4及图5。图3绘示依照图2的加工系统中的力感测装置的部分的立体示意图。图4绘示依照图3的力感测装置的部分的俯视示意图。图5绘示依照图4的力感测装置的部分沿v-v线剖面的侧视剖面示意图。
[0045]
如图2及图3所示,力感测装置1包括一中央部11、多个固定部121、122、多个第一感测部131、132、133、134及一第二感测部14。第二感测部14的形状为环状且围绕中央部11。多个第一感测部131、132、133、134分别连接中央部11与第二感测部14。固定部121、122分别连接第二感测部14的相对两侧。当中央部承受一力量或一力矩时,第一感测部131、132、133、134会产生第一振幅且第二感测部14会产生第二振幅。在本实施例中,中央部11、多个固定部121、122、多个第一感测部131、132、133、134及第二感测部14以一体成型的方式形成,但不以此为限。此外,所述第二感测部14的环状,其外边缘与内边缘的形状不以本实施例为限,可为多边形或圆形。
[0046]
如图4及图5所示,进一步说明图2的力感测装置1中的中央部11、固定部121、122、第一感测部131、132、133、134及第二感测部14彼此的相应关系。
[0047]
在本实施例中,中央部11的法向量n平行于图中的z轴。第一感测部131位于中央部11的正x轴方向。第一感测部131包括一扭转部1311、一弹性部1312及两个支撑部1313、1314。扭转部1311连接中央部11。弹性部1312位于两个支撑部1313、1314之间。弹性部1312的内端点p1沿一第一轴向d1连接扭转部1311且弹性部1312的外端点p2沿第一轴向d1连接第二感测部14。所述第一轴向d1与所述中央部11的法向量n垂直,且平行于图中的x轴。各支撑部1313、1314的内端点p3连接扭转部1311且各支撑部1313、1314的外端点p4连接第二感测部14。各支撑部1313、1314在图中的xy平面上曲折延伸。当中央部11承受一与第一轴向d1平行的力矩tx时,支撑部1313、1314可降低传递至弹性部1312的力矩,以使弹性部1312在测量与第一轴向d1平行的轴向力fx时,能有较高的准确度。弹性部1312沿z轴方向的厚度t1小于扭转部1311沿z轴方向的厚度t2以及各支撑部1313、1314沿z轴方向的厚度t3。此种配置可增加弹性部1312在测量各种力量时的灵敏度。举例而言,当中央部11承受与第一轴向d1平行的一轴向力时,因为弹性部1312的厚度较小,因此弹性部1312沿第一轴向d1会有较大的应变。如此,可增加弹性部1312测量沿第一轴向d1的力量时的灵敏度。此外,当中央部11
承受与第一轴向d1平行的一轴向力时,因为扭转部1311沿z轴方向的厚度t2较大,所以扭转部1311沿第一轴向d1的一应变小于弹性部1312沿第一轴向d1的一应变。如此,可降低轴向力对扭转部1311的测量准确度的影响。
[0048]
第一感测部132位于中央部11的负x轴方向。第一感测部132包括一扭转部1321、一弹性部1322及两个支撑部1323、1324。此外,第一感测部132的结构与第一感测部131的结构相同,第一感测部132与第一感测部131为轴对称地配置(对称轴为平行y轴且通过中央部11的中心的一轴线),故第一感测部132的进一步结构特征在此不予赘述。
[0049]
第一感测部133位于中央部11的正y轴方向。第一感测部133包括一扭转部1331、一弹性部1332及两个支撑部1333、1334。弹性部1332的内端点p1沿一第二轴向d2连接扭转部1331且弹性部1332的外端点p2沿第二轴向d2连接第二感测部14。所述第二轴向d2与第一轴向d1及所述中央部11的法向量n相互垂直,且平行于图中的y轴。当中央部11承受一与第二轴向d2平行的力矩ty时,支撑部1333、1334可分散传递至弹性部1332的力矩,以降低所述力矩对弹性部1332的影响,进而使弹性部1332在测量与第二轴向d2平行的轴向力fy时,能有较高的准确度。当中央部11承受与第二轴向d2平行的一轴向力fy时,因为扭转部1331沿z轴方向的厚度t2较大,扭转部1331沿第二轴向d2的一应变小于弹性部1332沿第二轴向d2的一应变。此外,第一感测部133与第一感测部131、132彼此类似,故第一感测部133的进一步结构特征在此不予赘述。
[0050]
第一感测部134位于中央部11的负y轴方向。第一感测部134包括一扭转部1341、一弹性部1342及两个支撑部1343、1344。此外,第一感测部134与第一感测部131、132、133彼此类似,故第一感测部134的进一步结构特征在此不予赘述。
[0051]
中央部11可同时承受一第一力量及一第二力量。第一力量具有一第一频率f1且第二力量具有一第二频率f2,其中第一力量的一第一频率f1小于第二力量的一第二频率f2。当力感测装置1应用于特定的机械加工设备时,可调整第一感测部131、132、133、134的刚性或质量及调整第二感测部14的刚性或质量,使得第一感测部131、132、133、134的第一自然频率fn1相近于所述第一力量的第一频率f1,并且使第二感测部14的第二自然频率fn2相近于所述第二力量的第二频率f2。如此,便能同时提升力感测装置1在测量第一力量,例如是进给力,及第二力量,例如是切削力,时的准确度及灵敏度。在不同机器设备上进行加工的一些实施例中,第一感测部131、132、133、134的第一自然频率的范围可以是1~10hz且第二感测部14的第二自然频率的范围可以是10~8000hz。
[0052]
在一实施例中,当力感测装置1应用于切削的工具机时,第一力量可为对工件加工的低频进给力(频率为f1)且第二力量可为对工件加工的高频切削力(频率为f2)。由于第一感测部131、132、133、134为低刚性(low stiffness)的结构且第二感测部14为高刚性(high stiffness)的结构,即第一感测部131、132、133、134的刚性小于第二感测部14的刚性。因此,第二感测部14的第二自然频率fn2可远大于第一感测部131、132、133、134的第一自然频率fn1。如此,当力感测装置1同时承受低频的进给力及高频的切削力时,可以在相隔很远的二个频率范围内,容易的区分第一感测部131、132、133、134所产生的第一振幅及第二感测部14的产生的第二振幅。更进一步地说,当第一感测部131、132、133、134的刚性小于第二感测部14的刚性时,第一振幅所对应的频率会落在一较低的频率范围内,例如1hz~10hz,且第二振幅所对应的频率落在一较高的频率范围内,例如10hz~8000hz。
[0053]
本发明不对低刚性的第一感测部131、132、133、134的结构与外型及高刚性的第二感测部14结构与外型进行限制。举例而言,在一未绘示的实施例中,第二感测部14可以是环绕中央部11的方形环状结构且第一感测部131、132、133、134可为连接中央部11与第二感测部14的直线型梁状结构。在另一未绘示的实施例中,第二感测部14可以长方体型结构且第一感测部131、132、133、134可为连接中央部11与第二感测部14的中空型柱状结构。此外,第一感测部131、132、133、134也可具有凹槽或穿孔的结构,使得第一感测部131、132、133、134的刚性可远小于第二感测部14的刚性。本实施例的第二感测部14的环状结构,其外边缘与内边缘的形状不以本实施例为限,可为多边形或圆形。
[0054]
当中央部11承受的第一力量为一低频的进给力时,借着调整第一感测部131、132、133、134的刚性(例如,改变第一感测部131、132、133、134沿z轴方向的厚度)与调整第二感测部14的刚性(例如,改变第二感测部14沿第一轴向d1的截面积),可使得第一感测部131、132、133、134的第一自然频率fn1与低频进给力的频率f1相近且使得第二感测部14的第二自然频率fn2远离低频进给力的频率f1。如此一来,第一感测部131、132、133、134产生很大的第一振幅。相对地,由于第二感测部14的第二自然频率fn2远离低频进给力的频率f1,第二感测部14无法产生很大的第二振幅。进一步调整第二感测部14的刚性,可使第二感测部14的第二自然频率fn2更加远离低频进给力的第一频率f1,进而使第一感测部131、132、133、134的第一振幅大于第二感测部14的第二振幅。较佳地调整第一感测部131、132、133、134的刚性后,可使第一感测部131、132、133、134的一第一自然频率fn1实质上等于低频进给力的频率f1。如此,当中央部11承受低频进给力时,可通过第一感测部131、132、133、134的自然共振现象来放大第一振幅,进而优化第一感测部131、132、133、134的测量灵敏度。
[0055]
当中央部11承受的第二力量为一高频的切削力时,借着调整第一感测部131、132、133、134的刚性与调整第二感测部14的刚性,可使得第一感测部131、132、133、134的第一自然频率fn1远离高频切削力的频率f2且使得第二感测部14的第二自然频率fn2与高频切削力的频率f2相近。如此一来,第二感测部14会产生很大的第二振幅。相对地,由于第一感测部131、132、133、134的第一自然频率fn1远离高频切削力的频率f2,第一感测部131、132、133、134无法产生很大的第一振幅。进一步调整第一感测部131、132、133、134的刚性,可使第一感测部131、132、133、134的第一自然频率fn1更加远离高频切削力的第二频率f2,进而使第一感测部131、132、133、134的第一振幅小于第二感测部14的第二振幅。较佳地调整第二感测部14的刚性后,可使第二感测部14的一第二自然频率fn2实质上等于高频切削力的频率f2。如此,当中央部11承受高频切削力时,可通过第二感测部14的自然共振现象来放大第二振幅,进而优化第二感测部14的测量灵敏度。
[0056]
当中央部11同时承受的第一力量为一低频的进给力与的第二力量为一高频的切削力时,借着调整第一感测部131、132、133、134的刚性与调整第二感测部14的刚性,可使得第一感测部131、132、133、134的第一自然频率fn1与低频进给力的频率f1相近且使得第二感测部14的第二自然频率fn2与高频切削力的频率f2相近。如此一来,第一感测部131、132、133、134产生很大的第一振幅。相对地,第二感测部14也会产生很大的第二振幅。较佳地调整第一感测部131、132、133、134的刚性及第二感测部14的刚性后,可使第一感测部131、132、133、134的一第一自然频率fn1实质上等于低频进给力的频率f1且使第二感测部14的第二自然频率fn2实质上等于高频切削力的频率f2。如此,当中央部11同时承受低频进给力
与高频切削力时,可通过第一感测部131、132、133、134的自然共振现象来放大第一振幅及通过第二感测部14的自然共振现象来放大第二振幅,进而同时优化第一感测部131、132、133、134的测量灵敏度及第二感测部14的测量灵敏度。
[0057]
参照图6、图7及图8。图6绘示依照图2的加工系统中的力感测装置的立体分解示意图。图7绘示依照图6的力感测装置的仰视示意图。图8绘示依照图6的力感测装置的俯视示意图。如图6所示,力感测装置1还包括多个第一机电元件15及多个第二机电元件16。多个第一机电元件15设置于第一感测部131、132、133、134且用以感测第一感测部131、132、133、134的一第一振幅。多个第二机电元件16设置于第二感测部14且用以感测第二感测部14的一第二振幅。
[0058]
当中央部11承受第一力量,例如是具有低频特性的进给力时,可通过第一感测部131、132、133、134的自然共振现象来放大第一振幅,使第一机电元件15产生较大的第一电性信号,进而优化第一感测部131、132、133、134的测量灵敏度。当中央部11承受第二力量,例如是具有高频特性的切削力时,可通过第二感测部14的自然共振现象来放大第二振幅,使第二机电元件16产生较大的第二电性信号,进而优化第二感测部14的测量灵敏度。当中央部11同时承受第一力量及第二力量时,可同时放大第一振幅及第二振幅,使第一机电元件15产生较大的第一电性信号且使第二机电元件16产生较大的第二电性信号,以便能同时优化第一感测部131、132、133、134的测量灵敏度及第二感测部14的测量灵敏度。
[0059]
图7及图8绘示图6中多个第一机电元件15设置于第一感测部131、132、133、134的细节,且绘示多个第二机电元件16设置于第二感测部14的细节。第一机电元件15可为压阻元件。第一机电元件15包含第一机电元件1511、1512、1513、1514、1521a、1521b、1522a、1522b、1523a、1523b、1524a、1524b、1531a、1531b、1532a、1532b、1533a、1533b、1534a、1534b、1541a、1541b、1542a、1542b。第二机电元件16可为压电元件。第二机电元件16包含第二机电元件161、162、163、164、165、166、167、168。
[0060]
如图7所示,第一机电元件1511、1512沿y轴方向并列,且设置于中央部11与扭转部1311的交接处。第一机电元件1513、1514沿y轴方向并列,且设置于中央部11与扭转部1321的交接处。
[0061]
第一机电元件1511、1512、1513、1514用以测量中央部11承受与其法向量n平行的一力矩,亦即z轴方向力矩tz。当第一机电元件1511、1514测量到所在位置处于压缩状态且第一机电元件1512、1513测量到所在位置处于拉伸状态时,表示中央部11承受正z轴方向力矩。相反地,当第一机电元件1511、1514测量到所在位置处于拉伸状态且第一机电元件1512、1513测量到所在位置处于压缩状态时,表示中央部11承受负z轴方向力矩。当上述两种状态缓慢交替出现时,表示中央部11承受低频的z轴方向的力矩。换言之,中央部11在较长的周期内承受着正z轴方向的力矩与负z轴方向的力矩。
[0062]
如图7所示,第一机电元件1521a设置于扭转部1311的朝向负z轴方向的表面且邻近中央部11。第一机电元件1522a设置于扭转部1321的朝向负z轴方向的表面且邻近中央部11。如图8所示,第一机电元件1521b设置于扭转部1311的朝向正z轴方向的表面且邻近中央部11。第一机电元件1522b设置于扭转部1321的朝向正z轴方向的表面且邻近中央部11。
[0063]
如图7及图8所示,第一机电元件1521a、1522a、1521b、1522b用以测量中央部11承受与第二轴向d2平行的一力矩,亦即y轴方向力矩ty。当第一机电元件1522a、1521b测量到
所在位置处于压缩状态且第一机电元件1521a、1522b测量到所在位置处于拉伸状态时,表示中央部11承受正y轴方向力矩。相反地,当第一机电元件1522a、1521b测量到所在位置处于拉伸状态且第一机电元件1521a、1522b测量到所在位置处于压缩状态时,表示中央部11承受负y轴方向力矩。当上述两种状态缓慢交替出现时,表示中央部11承受低频的y轴方向的力矩。换言之,中央部11在较长的周期内承受着正y轴方向的力矩与负y轴方向的力矩。
[0064]
如图7所示,第一机电元件1523a设置于扭转部1331的朝向负z轴方向的表面且邻近中央部11。第一机电元件1524a设置于扭转部1341的朝向负z轴方向的表面且邻近中央部11。如图8所示,第一机电元件1523b设置于扭转部1331的朝向正z轴方向的表面且邻近中央部11。第一机电元件1524b设置于扭转部1341的朝向正z轴方向的表面且邻近中央部11。
[0065]
如图7及图8所示,第一机电元件1523a、1524a、1523b、1524b用以测量中央部11承受与第一轴向d1平行的一力矩,亦即x轴方向力矩tx。当第一机电元件1523a、1524b测量到所在位置处于压缩状态且第一机电元件1524a、1523b测量到所在位置处于拉伸状态时,表示中央部11承受正x轴方向力矩。相反地,当第一机电元件1523a、1524b测量到所在位置处于拉伸状态且第一机电元件1524a、1523b测量到所在位置处于压缩状态时,表示中央部11承受负x轴方向力矩。当上述两种状态缓慢交替出现时,表示中央部11承受低频的x轴方向的力矩。换言之,中央部11在较长的周期内承受着正x轴方向的力矩与负x轴方向的力矩。
[0066]
如图7所示,第一机电元件1531a设置于弹性部1312的朝向负z轴方向的表面且邻近扭转部1311。第一机电元件1532a设置于弹性部1322的朝向负z轴方向的表面且邻近扭转部1321。如图8所示,第一机电元件1531b设置于弹性部1312的朝向正z轴方向的表面且邻近扭转部1311。第一机电元件1532b设置于弹性部1322的朝向正z轴方向的表面且邻近扭转部1321。
[0067]
如图7及图8所示,第一机电元件1531a、1532a、1531b、1532b用以测量中央部11承受与第一轴向d1平行的一轴向力,亦即x轴方向轴向力fx。当第一机电元件1531a、1531b测量到所在位置处于压缩状态且第一机电元件1532a、1532b测量到所在位置处于拉伸状态时,表示中央部11承受正x轴方向轴向力。相反地,当第一机电元件1531a、1531b测量到所在位置处于拉伸状态且第一机电元件1532a、1532b测量到所在位置处于压缩状态时,表示中央部11承受负x轴方向轴向力。当上述两种状态缓慢交替出现时,表示中央部11承受低频的x轴方向的轴向力。换言之,中央部11在较长的周期内承受着正x轴方向的轴向力与负x轴方向的轴向力。
[0068]
如图7所示,第一机电元件1533a设置于弹性部1332的朝向负z轴方向的表面且邻近扭转部1331。第一机电元件1534a设置于弹性部1342的朝向负z轴方向的表面且邻近扭转部1341。如图8所示,第一机电元件1533b设置于弹性部1332的朝向正z轴方向的表面且邻近扭转部1331。第一机电元件1534b设置于弹性部1342的朝向正z轴方向的表面且邻近扭转部1341。
[0069]
如图7及图8所示,第一机电元件1533a、1534a、1533b、1534b用以测量中央部11承受与第二轴向d2平行的一轴向力,亦即y轴方向轴向力fy。当第一机电元件1533a、1533b测量到所在位置处于压缩状态且第一机电元件1534a、1534b测量到所在位置处于拉伸状态时,表示中央部11承受正y轴方向轴向力。相反地,当第一机电元件1533a、1533b测量到所在位置处于拉伸状态且第一机电元件1534a、1534b测量到所在位置处于压缩状态时,表示中
央部11承受负y轴方向轴向力。当上述两种状态缓慢交替出现时,表示中央部11承受低频的y轴方向的轴向力。换言之,中央部11在较长的周期内承受着正y轴方向的轴向力与负y轴方向的轴向力。
[0070]
如图7所示,第一机电元件1541a设置于弹性部1312的朝向负z轴方向的表面且邻近第二感测部14。第一机电元件1542a设置于弹性部1322的朝向负z轴方向的表面且邻近第二感测部14。如图8所示,第一机电元件1541b设置于弹性部1312的朝向正z轴方向的表面且邻近第二感测部14。第一机电元件1542b设置于弹性部1322的朝向正z轴方向的表面且邻近第二感测部14。
[0071]
如图7及图8所示,第一机电元件1541a、1542a、1541b、1542b用以测量中央部11承受与其法向量n平行的一轴向力,亦即z轴方向轴向力fz。当第一机电元件1541a、1542a测量到所在位置处于压缩状态且第一机电元件1541b、1542b测量到所在位置处于拉伸状态时,表示中央部11承受正z轴方向轴向力。相反地,当第一机电元件1541a、1542a测量到所在位置处于拉伸状态且第一机电元件1541b、1542b测量到所在位置处于压缩状态时,表示中央部11承受负z轴方向轴向力。当上述两种状态缓面交替出现时,表示中央部11承受低频的z轴方向的轴向力。换言之,中央部11在较长的周期内承受着正z轴方向的轴向力与负z轴方向的轴向力。
[0072]
如图8所示,第二机电元件161设置于第二感测部14的凹槽141内且邻近弹性部1312。第二机电元件162设置于第二感测部14的凹槽142内且邻近弹性部1322。
[0073]
第二机电元件161、162用以测量中央部11承受与第一轴向d1平行的一轴向力,亦即x轴方向轴向力fx。当第二机电元件161测量到所在位置处于压缩状态且第二机电元件162测量到所在位置处于拉伸状态时,表示中央部11承受正x轴方向轴向力。相反地,当第二机电元件161测量到所在位置处于拉伸状态且第二机电元件162测量到所在位置处于压缩状态时,表示中央部11承受负x轴方向轴向力。当上述两种状态快速交替出现时,表示中央部11承受高频的x轴方向的轴向力。换言之,中央部11在较短的周期内承受着正x轴方向的轴向力与负x轴方向的轴向力。
[0074]
如图8所示,第二机电元件163设置于第二感测部14的凹槽143内且邻近弹性部1332。第二机电元件164设置于第二感测部14的凹槽144内且邻近弹性部1342。
[0075]
第二机电元件163、164用以测量中央部11承受与第二轴向d2平行的一轴向力,亦即y轴方向轴向力fy。当第二机电元件163测量到所在位置处于压缩状态且第二机电元件164测量到所在位置处于拉伸状态时,表示中央部11承受正y轴方向轴向力。相反地,当第二机电元件163测量到所在位置处于拉伸状态且第二机电元件164测量到所在位置处于压缩状态时,表示中央部11承受负y轴方向轴向力。当上述两种状态快速交替出现时,表示中央部11承受高频的y轴方向的轴向力。换言之,中央部11在较短的周期内承受着正y轴方向的轴向力与负y轴方向的轴向力。
[0076]
此外,第二机电元件161、162、163、164用以测量中央部11承受与其法向量n平行的一力矩,亦即z轴方向的一力矩tz。当第二机电元件161、162、163、164测量到所在位置处于拉伸状态时,表示中央部11承受正z轴方向力矩。当第二机电元件161、162、163、164测量到所在位置处于压缩状态时,表示中央部11承受负z轴方向力矩。当上述状态反复出现时,表示中央部11承受高频的z轴方向的力矩。换言之,中央部11在较短的周期内承受着正z轴方
向的力矩与负z轴方向的力矩。
[0077]
再者,第二机电元件165设置于第二感测部14的凹槽145内,且邻近第一感测部131的支撑部1313及第一感测部134的支撑部1344。支撑部1313及支撑部1344彼此相邻。第二机电元件166设置于第二感测部14的凹槽146内,且邻近第一感测部131的支撑部1314及第一感测部133的支撑部1333。支撑部1314及支撑部1333彼此相邻。第二机电元件167设置于第二感测部14的凹槽147内,且邻近第一感测部132的支撑部1323及第一感测部133的支撑部1334。支撑部1323及支撑部1334彼此相邻。第二机电元件168设置于第二感测部14的凹槽148内,且邻近第一感测部132的支撑部1324及第一感测部134的支撑部1343。支撑部1324及支撑部1343彼此相邻。
[0078]
第二机电元件165、166、167、168用以测量中央部11所承受的力矩,例如与第一轴向d1平行的一力矩(亦即x轴方向力矩tx),或与第二轴向d2平行的一力矩(亦即y轴方向力矩ty)。此外,第二机电元件165、166、167、168亦可用以测量中央部11承受与其法向量n平行的一轴向力,亦即z轴方向轴向力fz。
[0079]
当第二机电元件165、168测量到所在位置处于压缩状态且第二机电元件166、167测量到所在位置处于拉伸状态时,表示中央部11承受正x轴方向力矩tx。相反地,当第二机电元件165、168测量到所在位置处于拉伸状态且第二机电元件166、167测量到所在位置处于压缩状态时,表示中央部11承受负x轴方向力矩。当上述两种状态快速交替出现时,表示中央部11承受高频的x轴方向的力矩。换言之,中央部11在较短的周期内承受着正x轴方向的力矩与负x轴方向的力矩。
[0080]
当第二机电元件165、166测量到所在位置处于压缩状态且第二机电元件167、168测量到所在位置处于拉伸状态时,表示中央部11承受正y轴方向力矩ty。相反地,当第二机电元件165、166测量到所在位置处于拉伸状态且第二机电元件167、168测量到所在位置处于压缩状态时,表示中央部11承受负y轴方向力矩。当上述两种状态快速交替出现时,表示中央部11承受高频的y轴方向的力矩。换言之,中央部11在较短的周期内承受着正y轴方向的力矩与负y轴方向的力矩。
[0081]
当第二机电元件165、166、167、168测量到所在位置处于拉伸状态时,表示中央部11承受正z轴方向轴向力fz。相反地,当第二机电元件165、166、167、168测量到所在位置处于压缩状态时,表示中央部11承受负z轴方向轴向力。当上述两种状态快速交替出现时,表示中央部11承受高频的z轴方向的轴向力。换言之,中央部11在较短的周期内承受着正z轴方向的轴向力与负z轴方向的轴向力。
[0082]
另外,于其他实施例中,亦可视需求而省略设置第一机电元件1521b、1522b、1523b、1524b、1531b、1532b、1533b、1534b、1541b、1542b,但不以此为限。
[0083]
综上所述,本发明的一实施例的力感测装置,在中央部承受较低频的第一力量时,第一感测部会产生较大的第一振幅,以提升感测第一力量时的灵敏度。此外,本发明的一实施例的力感测装置,在中央部承受较高频的第二力量时,第二感测部会产生较大的第二振幅,以提升感测第二力量时的灵敏度。因此,本发明的一实施例的力感测装置可借着准确地同时感测低频的第一力量及高频的第二力量,进而可供控制模块对制作工艺中所产生的进给力与切削力的变异进行即时监控,并提供后续的补偿控制与健康诊断。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1