双料带自动焊接设备的制作方法
[0001]
本实用新型涉及焊接设备领域,特别涉及一种双料带自动焊接设备。
背景技术:
[0002]
3c产品是近几年来伴随着电子产业的发展而新兴起的,主要是指计算机类(computer)、通信类(communication)、消费类(consumer)电子产品,在这一行业中,科技的发展日新月异,升级换代频繁,几乎每个月都要推出大量新产品,这也就成为产品设计的热点领域。
[0003]
目前,针对3c产品有专门的3c行业,3c产品一般是通过大量的零部件组装形成,而焊接则是制造这些3c产品零部件所必不可少的工序之一。
[0004]
对于3c领域的单个产品,客户要求不能有任何连料点。现有的生产工艺是:人工手动将单个产品摆放进焊接模具内,再配合转盘进行焊接作业,现有工艺无法实现双料带自动化焊接,按照此方法生产出来的产品是零散的、厚度薄容易变形,而且用人多、效率低,由此,现有的生产方式不适合现代化生产的要求。
技术实现要素:
[0005]
本实用新型的目的是提供一种能够实现连线生产、节省人力、提高效率良率、便于生产管控的双料带自动焊接设备,至少能够解决上述问题之一
[0006]
根据本实用新型的一个方面,提供了一种双料带自动焊接设备,包括机台以及设置于机台的第一拉料装置、第二拉料装置、焊接装置、焊接治具和切断装置,焊接装置与焊接治具相配合,焊接治具包括相互配合的上模具和下模具,切断装置与下模具相配合,下模具包括转盘、转盘旋转驱动机构和转盘顶升驱动机构,转盘安装于转盘旋转驱动机构,转盘顶升驱动机构安装于转盘旋转驱动机构外周;
[0007]
第一拉料装置配置为传送第一料带;
[0008]
第二拉料装置配置为传送第二料带;
[0009]
切断装置配置为切断第二料带,使得第二料带上的第二工件落入转盘;
[0010]
转盘旋转驱动机构配置为驱动转盘旋转,使得转盘上的第二工件传送至上模具的正下方;
[0011]
转盘顶升驱动机构配置为将转盘向上顶升,使得转盘上的第二工件与第一料带贴合;
[0012]
焊接装置配置为对第一料带和第二工件进行焊接,使得第二工件焊接于第一料带的下方。
[0013]
由此,本实用新型的双料带自动焊接设备的工作原理为:本实用新型的双料带为十字进料方式,第一拉料装置带动第一料带移动至焊接治具的上模具与下模具之间,第二拉料装置带动第二料带移动至移动至切断装置的切断模具下方,在切断装置的作用下,第二料带上的第二工件被切断且直接落到转盘上,转盘旋转驱动机构驱动转盘旋转,使得转
盘上的第二工件传送至上模具的正下方,转盘顶升驱动机构将转盘向上顶升,使得转盘上的第二工件与第一料带贴合,焊接装置开始进行焊接作业,将第二工件焊接于第一料带上,以此循环。本实用新型的焊接设备可连续进行自动化生产、节约生产人力、提高生产效率与良率。
[0014]
在一些实施方式中,下模具还包括设置于转盘上方的工件承载模具,所述工件承载模具上设有与第二工件相配合的定位件。由此,工件承载模具能有效的对落入模具的第二工件进行限位,便于后续工作的高效进行。
[0015]
在一些实施方式中,工件承载模具为多个。由此,可以提高生产效率。
[0016]
在一些实施方式中,工件承载模具为4个,4个工件承载模具呈“十字”分布,其中两个工件承载模具的长度方向与第一料带的运输方向相同,另外两个工件承载模具的长度方向与第二料带的运输方向相同。
[0017]
在一些实施方式中,焊接装置包括焊接镜头和升降调节机构,焊接镜头位于上模具的正上方,焊接镜头向下发射出光路,作用于上模具与下模具之间的第一料带,升降调节机构安装于机台,焊接镜头安装于升降调节机构,升降调节机构用于调节焊接镜头与焊接治具之间的距离。由此,本实用新型的焊接装置可依产品的焊接范围进行多变距调整。
[0018]
在一些实施方式中,焊接装置为两个。由此,每进行一次焊接工作可以同时将两个工件承载模具上的第二工件焊接于第一料带,生产效率高。
[0019]
在一些实施方式中,升降调节机构包括丝杆螺母组件、滑块、导向条和第二驱动件,导向条为中空结构,丝杆螺母组件安装于导向条的内部,丝杆螺母组件包括丝杆和螺母,丝杆可转动地安装于导向条,螺母套设于丝杆的外周,焊接镜头安装于滑块,滑块与螺母固定连接,滑块与导向条滑动配合,第二驱动件安装于导向条且驱动端与丝杆动力连接。由此,升降调节机构的工作原理为:第二驱动件驱动丝杆旋转,带动套设于丝杆外周的螺母旋转,带动滑块以及安装于滑块的焊接镜头一起沿着导向条上下滑动,进而实现焊接镜头的位置调节,即实现焦距调整。
[0020]
在一些实施方式中,第二驱动件为调节手柄或者伺服电机。由此,当第二驱动件为调节手柄时,焊接镜头焦距的调节方式为手动调节;当第二驱动件为伺服电机时,焊接镜头焦距的调节方式为电动或者自动调节。
[0021]
在一些实施方式中,双料带自动焊接设备还包括设置于机台的第一导料装置,第一导料装置与第一拉料装置相配合。由此,在第一拉料装置的作用下,产品料带先经过第一导料装置进入焊接治具,然后再移动到焊接镜头正下方的焊接位置。第一导料装置与第一拉料装置的配合能够顺利实现第一料带的进出料。
[0022]
在一些实施方式中,双料带自动焊接设备还包括设置于机台的第二导料装置,第二导料装置与第二拉料装置相配合。由此,在第二拉料装置的作用下,第二料带先经过第二导料装置进入切断装置,然后空料带再从第二拉料装置输出。第二导料装置与第二拉料装置的配合能够顺利实现第二料带的进出料。
[0023]
在一些实施方式中,双料带自动焊接设备还包括控制器,控制器与第一拉料装置、第二拉料装置、焊接装置、焊接治具以及切断装置均连接,用于控制各装置的工作。由此,本实用新型的控制器可以为plc,plc控制器可以灵活调整焊接时间和料带前进的速度,使之相互配合,高效完成焊接工作。
[0024]
本实用新型的有益效果:
[0025]
本实用新型的双料带自动焊接设备的工作原理为:本实用新型的双料带为十字进料方式,第一拉料装置带动第一料带移动至焊接治具的上模具与下模具之间,第二拉料装置带动第二料带移动至移动至切断装置的切断模具下方,在切断装置的作用下,第二料带上的第二工件被切断且直接落到转盘上,转盘旋转驱动机构驱动转盘旋转,使得转盘上的第二工件传送至上模具的正下方,转盘顶升驱动机构将转盘向上顶升,使得转盘上的第二工件与第一料带贴合,焊接装置开始进行焊接作业,将第二工件焊接于第一料带上,以此循环。本实用新型的焊接设备可连续进行自动化生产、节约生产人力、提高生产效率与良率。
附图说明
[0026]
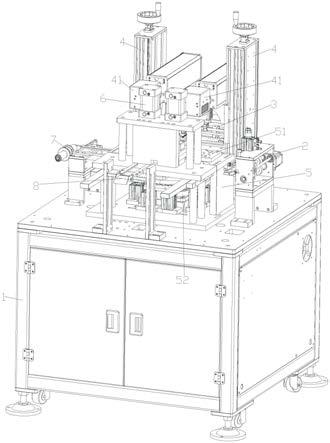
图1为本实用新型一实施方式的双料带自动焊接设备的立体结构示意图之一;
[0027]
图2为图1所示的双料带自动焊接设备去掉机台后的立体结构示意图;
[0028]
图3为图2所示的双料带自动焊接设备的去掉焊接装置后的简化立体结构示意图之一;
[0029]
图4为图2所示的双料带自动焊接设备的去掉焊接装置后的简化立体结构示意图之二;
[0030]
图5为图4所示的双料带自动焊接设备进一步简化后的立体结构示意图;
[0031]
图6为图1所示的双料带自动焊接设备的焊接装置的立体结构示意图;
[0032]
图7为图1所示的双料带自动焊接设备的第一料带的放大结构示意图;
[0033]
图8为图1所示的双料带自动焊接设备的第二料带的放大结构示意图。
[0034]
图1~8中的附图标记:1-机台;2-第一拉料装置;3-第二拉料装置;4
-ꢀ
焊接装置;5-焊接治具;6-切断装置;7-第一导料装置;8-第二导料装置; 9-第一料带;10-第二料带;11-第一工件;12-第二工件;41-焊接镜头;42
-ꢀ
升降调节机构;51-上模具;52-下模具;421-滑块;422-导向条;423-第二驱动件;521-转盘;522-转盘旋转驱动机构;523-转盘顶升驱动机构;524
-ꢀ
工件承载模具;524a-定位件。
具体实施方式
[0035]
下面结合附图对本实用新型作进一步详细的说明。
[0036]
图1~8示意性地显示了根据本实用新型的一种实施方式的双料带自动焊接设备。
[0037]
如图1~8所示,该双料带自动焊接设备包括机台1以及安装于机台1 的第一拉料装置2、第二拉料装置3、焊接装置4、焊接治具5和切断装置 6。焊接装置4与焊接治具5相配合。焊接治具5包括相互配合的上模具51 和下模具52,切断装置6与下模具52相配合。
[0038]
下模具52包括转盘521、转盘旋转驱动机构522和转盘顶升驱动机构 523。转盘521安装于转盘旋转驱动机构522,转盘顶升驱动机构523安装于转盘旋转驱动机构522外周。
[0039]
本实施方式的转盘旋转驱动机构522可以为广东吉嘉精密科技有限公司生产的gsn系列中空旋转平台(比如,gsn200-10k/18k-sv)与伺服电机等的组合,转盘521的底部套设于该中空旋转平台。
[0040]
本实施方式的转盘顶升驱动机构523可以由多个顶升气缸以及安装于顶升气缸上端部的顶升板组成,顶升板与转盘521的底部通过螺栓等固定连接,顶升气缸驱动顶升板上
升,进而使得转盘521向上顶升。
[0041]
第一拉料装置2配置为传送第一料带9;
[0042]
第二拉料装置3配置为传送第二料带10;
[0043]
切断装置6配置为切断第二料带10,使得第二料带10上的第二工件 12落入转盘521;
[0044]
转盘旋转驱动机构522配置为驱动转盘521旋转,使得转盘521上的第二工件12传送至上模具51的正下方;
[0045]
转盘顶升驱动机构523配置为将转盘521向上顶升,使得转盘521上的第二工件12与第一料带9贴合;
[0046]
焊接装置4配置为对第一料带9和第二工件12进行焊接,使得第二工件12焊接于第一料带9的下方。
[0047]
下模具52还包括设置于转盘521上方的工件承载模具524,所述工件承载模具524上设有与第二工件12相配合的定位件524a。由此,工件承载模具524能有效的对落入模具的第二工件12进行限位,便于后续工作的高效进行。
[0048]
如图5所示,工件承载模具524为多个。本实施方式的工件承载模具 524为4个,4个工件承载模具524呈“十字”分布,其中两个工件承载模具524的长度方向与第一料带9的运输方向相同,另外两个工件承载模具 524的长度方向与第二料带10的运输方向相同。
[0049]
如图1和图2所示,本实施方式的焊接装置4为两个。由此,每进行一次焊接工作可以同时将两个工件承载模具524上的第二工件12焊接于第一料带9,生产效率高。
[0050]
本实施方式的焊接装置4包括焊接镜头41和升降调节机构42。焊接镜头41位于上模具51的正上方,焊接镜头41向下发射出光路,作用于上模具51与下模具52之间的第一料带9,升降调节机构42安装于机台1,焊接镜头41安装于升降调节机构42,升降调节机构42用于调节焊接镜头41 与焊接治具5之间的距离。由此,本实用新型的焊接装置4可依产品的焊接范围进行多变距调整。
[0051]
本实施方式的升降调节机构42包括丝杆螺母组件、滑块421、导向条 422和第二驱动件423。导向条422为中空结构,丝杆螺母组件安装于导向条422的内部。丝杆螺母组件包括丝杆和螺母。丝杆可转动地安装于导向条422,螺母套设于丝杆的外周。焊接镜头41安装于滑块421,滑块421 与螺母固定连接。滑块421套设于导向条422且与导向条422滑动配合。第二驱动件423安装于导向条422且驱动端与丝杆动力连接。由此,升降调节机构42的工作原理为:第二驱动件423驱动丝杆旋转,带动套设于丝杆外周的螺母旋转,带动滑块421以及安装于滑块421的焊接镜头41一起沿着导向条422上下滑动,进而实现焊接镜头41的位置调节,即实现焦距调整。
[0052]
第二驱动件423为调节手柄或者伺服电机。由此,当第二驱动件423 为调节手柄时,焊接镜头41焦距的调节方式为手动调节;当第二驱动件423 为伺服电机时,焊接镜头41焦距的调节方式为电动或者自动调节。本实施方式的第二驱动件423为手柄。
[0053]
如图3~4所示,本实施方式的切断装置6为市面上常用的用于切断的切断治具,具体结构为:切断装置6包括切断上模、切断下模、安装架以及第一驱动件。安装架安装于机台1,切断上模与切断下模相配合且均安装于安装架。第二料带10在第二拉料装置3和第二导料装置8的作用下被传送至切断上模与切断下模之间。第一驱动件安装于安装架的顶部且
驱动端与切断上模连接,用于驱动切断上模下压。切断下模上开设有与下方的工件承载模具524相配合的开孔,切断后的第二工件12会从该开孔落入到工件承载模具524。本实施方式的第一驱动件可以为伸缩气缸。由此,本实用新型的切断装置6的作用为对第二料带10进行切断。
[0054]
双料带自动焊接设备还包括设置于机台1的第一导料装置7,第一导料装置7与第一拉料装置2相配合。本实施方式的第一拉料装置2可以为市面上常用的拉料器,可以与传感器等的配合来实现精准的第一料带9传送功能。第一导轮装置可以为导料板。由此,在第一拉料装置2的作用下,产品料带先经过第一导料装置7进入焊接治具5,然后再移动到焊接镜头 41正下方的焊接位置。第一导料装置7与第一拉料装置2的配合能够顺利实现第一料带9的进出料。
[0055]
双料带自动焊接设备还包括设置于机台1的第二导料装置8,第二导料装置8与第二拉料装置3相配合。本实施方式的第二拉料装置3可以为市面上常用的拉料器,可以与传感器等的配合来实现精准的第二料带10传送功能。本实施方式的第二导轮装置可以为导料板。由此,在第二拉料装置3 的作用下,第二料带10先经过第二导料装置8进入切断装置6,然后空料带再从第二拉料装置3输出。第二导料装置8与第二拉料装置3的配合能够顺利实现第二料带10的进出料。
[0056]
双料带自动焊接设备还包括控制器,控制器与第一拉料装置2、第二拉料装置3、焊接装置4、焊接治具5以及切断装置6均连接,用于控制各装置的工作。由此,本实用新型的控制器可以为plc,plc控制器可以灵活调整焊接时间和料带前进的速度,使之相互配合,高效完成焊接工作。
[0057]
本实施方式的双料带自动焊接设备的工作原理为:
[0058]
本实用新型的双料带为十字进料方式,第一拉料装置2带动第一料带9 移动至焊接治具5的上模具51与下模具52之间,第二拉料装置3带动第二料带10移动至移动至切断装置6的上下切断模具之间,在切断装置6的作用下,第二料带10上的第二工件12被切断且直接落到转盘521上方的工件承载模具524上,转盘旋转驱动机构522驱动转盘521旋转,使得转盘521上的第二工件12传送至上模具51的正下方,转盘顶升驱动机构523 将转盘521向上顶升,使得转盘521上的第二工件12与第一料带9贴合,两个焊接装置4同时开始进行焊接作业,将两个工件承载模具524上的第二工件12焊接于第一料带9上,以此循环。
[0059]
本实用新型的焊接设备可连续进行自动化生产、节约生产人力、提高生产效率与良率。
[0060]
以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1