一种便捷更换刀具的快速换刀数控机床的制作方法
1.本发明涉及数控机床领域,尤其涉及一种便捷更换刀具的快速换刀数控机床。
背景技术:
2.数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床,随着技术的不断更替,现有的数控机床具有自动更换刀具的功能,刀具输送机构将存放在刀具盘中的刀具取出,依靠机械手将刀具输送机构中夹取的刀具更换到数控机床的控刀机构中,智能方便。
3.现有的数控机床在进行自动更换刀具的步骤中,需要先后进行以下步骤,控刀机构对待更换的刀具进行冷却清洗,控刀机构将待更换的刀具移动至刀具输送机构一侧,刀具输送机构将刀具盘中需要更换上的刀具取出,刀具输送机构将该刀具提送到控刀机构一侧,刀具输送机构将控刀机构中待更换的刀具摘下,刀具输送机构将需要更换上的刀具插入控刀机构中,完成一套刀具自动更换工作步骤繁琐,并且消耗大量的时间用于各种步骤的定位工作,若在进行换刀步骤中出现定位偏差的现象,将出现刀具掉落或刀具未夹紧的现象发生,从而影响数控机床在后续工作中的顺利进行。
技术实现要素:
4.本发明提供一种便捷更换刀具的快速换刀数控机床,以解决数控机床完成一套刀具自动更换工作步骤繁琐,并且消耗大量的时间用于各种步骤的定位工作的技术问题。
5.为达上述目的:一种便捷更换刀具的快速换刀数控机床,包括有数控机床本体、进退机构、控刀机构、安装块、导向筒、卡刀筒、输液管、换刀机构、载刀块、机械夹和刀具输送机构,数控机床本体的左侧安装有进退机构,数控机床本体的后侧安装有输送载刀块并提供刀具的刀具输送机构,每个载刀块上各安装有一个不同类型的刀具,载刀块的上侧开设有环形的第三卡槽结构,载刀块的下侧开设有插接刀具的第四卡槽结构,在安装块左侧的视觉摄像头监控下,数控机床本体的中部通过控刀机构调控安装块带动刀具进行竖向位移和角度调节,安装块的中部固接有导向筒,安装块的下侧通过旋转驱动组件连接有卡刀筒,卡刀筒的内侧连接有锁定载刀块的锁定组件,卡刀筒的上侧滑动连接有环形盖板,并且环形盖板与卡刀筒之间设置有环形的蓄液槽结构,安装块的内部贯穿有输液管,数控机床本体的上侧安装有冷却液输送机构,输液管的上端通过进液管接通冷却液输送机构,环绕卡刀筒的边沿贯穿有若干个喷头,每个喷头均接通蓄液槽结构,数控机床本体的右侧设置有换刀机构,换刀机构的上侧安装有机械夹,换刀机构的下侧连接有接收从锁定组件中退出的载刀块的承托组件。
6.进一步的,导向筒的内侧设有若干个为载刀块提供减速阻力的第一导向槽,卡刀筒的内侧设有若干个为载刀块提供减速阻力的第二导向槽,第一导向槽和第二导向槽均设置为螺旋结构。
7.进一步的,控刀机构包括有升降滑块和第一电动转轴,数控机床本体的中部滑动
连接有升降滑块,升降滑块的前侧连接有第一电动转轴,第一电动转轴的前端固接安装块。
8.进一步的,换刀机构包括有第二电动转轴、第一固定臂和第二固定臂,数控机床本体的右侧连接有第二电动转轴,第二电动转轴的转轴部件上端固接有第一固定臂,第一固定臂的后端连接机械夹,第二电动转轴的转轴部件下端固接有第二固定臂,第二固定臂连接承托组件。
9.进一步的,载刀块的外表面设置有若干个与第一导向槽和第二导向槽相对应的导向凸块结构,并且导向凸块外周面的下部由外向内渐变式收缩。
10.进一步的,载刀块的每个导向凸块结构中部各开设一个用于定位的第一卡槽结构,载刀块的每个第一卡槽结构中部各开设一个用于锁定的第二卡槽结构。
11.进一步的,旋转驱动组件包括有驱动电机、直齿轮、转环和齿环,安装块的右侧固接有驱动电机,驱动电机的下端固接有直齿轮,安装块的下侧滑动连接有转环,转环的外表面固接有齿环,直齿轮与齿环相啮合。
12.进一步的,锁定组件包括有电动推杆、锁杆、卡板和第一弹簧件,卡刀筒的每个第二导向槽中各固接有一个电动推杆,每个电动推杆的伸缩端各固接有一个锁杆,每个锁杆的外端外表面各套设有一个卡板,每个卡板与相邻的锁杆之间各固接有一个第一弹簧件,第一弹簧件套设在相邻的锁杆外表面。
13.进一步的,卡板的形状与第一卡槽结构适配,用于对载刀块固定。
14.进一步的,承托组件包括有固定架、固定块、侧滑块、第二弹簧件、电动滑块和托板,第二固定臂的后端固接有固定架,固定架的左侧和右侧各固接有一个固定块,两个固定块的下侧各滑动连接有一个侧滑块,两个侧滑块与相邻的固定块之间各固接有一个第二弹簧件,两个侧滑块的相向侧各滑动连接有一个电动滑块,两个电动滑块的上侧各固接有一个托板。
15.本说明书实施例至少可以实现以下有益效果:在本发明相比现有技术,仅需进行一次定位工作,本数控机床中的刀具分别插设在一个载刀块中,在进行换刀工作时,先机械夹将刀具输送机构中需要安装的载刀块及刀具夹持,随后控刀机构将安装块中待进行更换的载刀块及刀具向上升起,同时换刀机构分别将机械夹和承托组件移动至安装块的上下两侧,接着机械夹将需要安装的载刀块松开,使该载刀块携带刀具向下掉落至安装块中的导向筒中,同时安装块中待更换的刀具从卡刀筒中向下掉落至承托组件中,并冷却液输送机构通过喷头对待更换的刀具进行冷却清洗,之后换刀机构分别同时带动机械夹和承托组件复位远离安装块,同时导向筒中的载刀块携带刀具向下滑落至卡刀筒中,锁定组件将其锁紧在卡刀筒中,完成换刀工作,于导向筒和卡刀筒中均设置有螺旋结构的导向槽,载刀块携带刀具沿导向筒和卡刀筒向下移动过程中受阻力而下移缓慢,避免载刀块下落过快发生剧烈磕碰,通过上述换刀工作,快速的完成一套刀具自动更换的工作,并且无需消耗大量的时间用于各种步骤的定位工作,从而避免换刀步骤中出现定位偏差的现象发生,保障数控机床在后续工作中的顺利进行。
附图说明
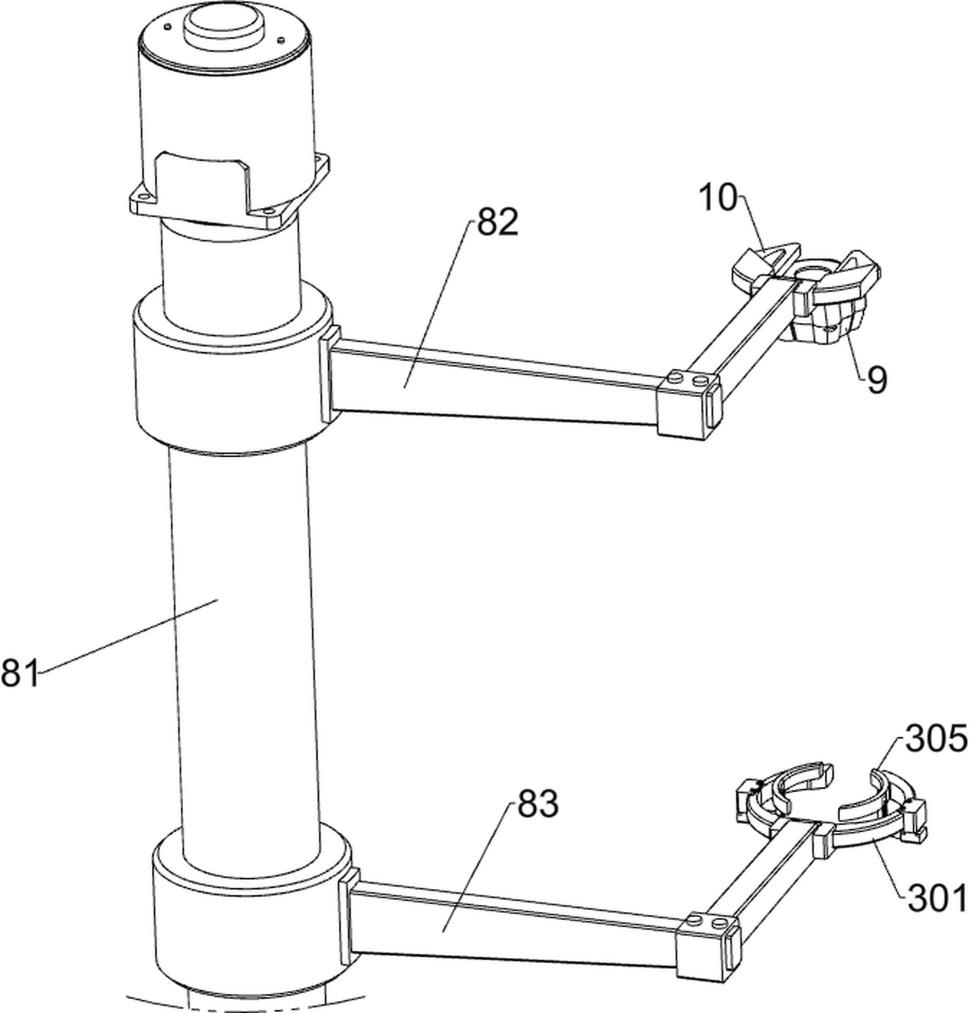
16.图1为本技术的立体结构示意图。
17.图2为本技术的旋转驱动组件立体结构示意图。
18.图3为本技术的安装块剖面图。
19.图4为本技术的导向筒立体结构示意图。
20.图5为本技术的卡刀筒剖面图。
21.图6为本技术的锁定组件立体结构示意图。
22.图7为本技术的锁定组件爆炸图。
23.图8为本技术的换刀机构立体结构示意图。
24.图9为本技术的载刀块立体结构示意图。
25.图10为本技术的载刀块仰视立体结构示意图。
26.图11为本技术的承托组件立体结构示意图。
27.图12为本技术的承托组件局部立体结构示意图。
28.附图标记中:1-数控机床本体,2-进退机构,31-升降滑块,32-第一电动转轴,4-安装块,41-视觉摄像头,5-导向筒,51-第一导向槽,6-卡刀筒,61-第二导向槽,62-环形盖板,622-蓄液槽,7-输液管,71-进液管,72-冷却液输送机构,73-喷头,81-第二电动转轴,82-第一固定臂,83-第二固定臂,9-载刀块,91-导向凸块,911-第一卡槽,912-第二卡槽,92-第三卡槽,93-第四卡槽,10-机械夹,11-刀具输送机构,101-驱动电机,102-直齿轮,103-转环,104-齿环,201-电动推杆,202-锁杆,203-卡板,204-第一弹簧件,301-固定架,3011-固定块,302-侧滑块,303-第二弹簧件,304-电动滑块,305-托板。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚;完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.一种便捷更换刀具的快速换刀数控机床,如图1-图12所示,包括有旋转驱动组件、锁定组件、承托组件、数控机床本体1、进退机构2、控刀机构、安装块4、导向筒5、卡刀筒6、输液管7、换刀机构、载刀块9、机械夹10和刀具输送机构11,数控机床本体1的左侧安装有进退机构2,数控机床本体1的中部设置有调控刀具的控刀机构,控刀机构的前侧连接有安装块4,安装块4的左侧安装有视觉摄像头41,安装块4的中部固接有导向筒5,安装块4的下侧连接有旋转驱动组件,旋转驱动组件的内部连接有卡刀筒6,卡刀筒6的内侧连接有锁定组件,卡刀筒6的上侧滑动连接有环形盖板62,环形盖板62与卡刀筒6之间设置有蓄液槽622结构,安装块4的内部贯穿有输液管7,数控机床本体1的上侧安装有冷却液输送机构72,输液管7的上端通过进液管71接通冷却液输送机构72,环绕卡刀筒6的边沿贯穿有若干个喷头73,每个喷头73均接通蓄液槽622结构,数控机床本体1的右侧设置有换刀机构,换刀机构的上侧安装有机械夹10,换刀机构的下侧连接有承托组件,数控机床本体1的后侧安装有输送载刀块9并提供刀具的刀具输送机构11,导向筒5的内侧开设有若干个螺旋结构的第一导向槽51,卡刀筒6的内侧开设有若干个螺旋结构的第二导向槽61,导向筒5的第一导向槽51与卡刀筒6的第二导向槽61共同对载刀块9的更换工作引导,并让输送载刀块9在导向筒5和环绕卡刀筒6内缓慢移动。
31.如图1和图2所示,控刀机构由升降滑块31和第一电动转轴32组成,数控机床本体1
的中部滑动连接有升降滑块31,升降滑块31的前侧连接有第一电动转轴32,第一电动转轴32的前端螺栓连接安装块4,由升降滑块31和第一电动转轴32方便对安装块4进行竖向位移和角度调节工作。
32.如图1和图8所示,换刀机构由第二电动转轴81、第一固定臂82和第二固定臂83组成,数控机床本体1的右侧连接有第二电动转轴81,第二电动转轴81的转轴部件上端固接有第一固定臂82,第一固定臂82的后端连接机械夹10,机械夹10将需换上的载刀块9和刀具夹持至导向筒5中,第二电动转轴81的转轴部件下端固接有第二固定臂83,第二固定臂83连接承托组件,承托组件将从卡刀筒6中换下的载刀块9和刀具接住。
33.如图9和图10所示,载刀块9的外表面设置有若干个导向凸块91结构,并且导向凸块91外周面的下部由外向内渐变式收缩,载刀块9在更换工作中通过导向凸块91分别沿第一导向槽51和第二导向槽61,在导向筒5和卡刀筒6中移动,载刀块9的每个导向凸块91结构中部各开设一个第一卡槽911结构,并且载刀块9的每个第一卡槽911结构中部各开设一个第二卡槽912结构,锁定组件通过载刀块9的第一卡槽911结构对其进行定位工作,锁定组件通过载刀块9的第二卡槽912结构对其进行锁紧工作,载刀块9的上侧开设有环形的第三卡槽92结构,机械夹10通过第三卡槽92结构将载刀块9夹持,载刀块9的下侧开设有第四卡槽93结构,载刀块9通过第四卡槽93结构连接不同的刀具。
34.如图3所示,旋转驱动组件由驱动电机101、直齿轮102、转环103和齿环104组成,安装块4的右侧螺栓连接有驱动电机101,驱动电机101的下端固接有直齿轮102,安装块4的下侧滑动连接有转环103,转环103的外表面螺栓连接有齿环104,直齿轮102与齿环104相啮合。
35.如图5-图7所示,锁定组件由电动推杆201、锁杆202、卡板203和第一弹簧件204组成,卡刀筒6的每个第二导向槽61中各固接有一个电动推杆201,每个电动推杆201的伸缩端各螺栓连接有一个锁杆202,锁杆202通过载刀块9的第二卡槽912结构对其进行锁紧工作,每个锁杆202的外端外表面各套设有一个卡板203,卡板的形状与第一卡槽结构适配,卡板203通过载刀块9的第一卡槽911结构对其进行定位工作,每个卡板203与相邻的锁杆202之间各固接有一个第一弹簧件204,第一弹簧件204套设在相邻的锁杆202外表面。
36.如图11和图12所示,承托组件由固定架301、固定块3011、侧滑块302、第二弹簧件303、电动滑块304和托板305组成,第二固定臂83的后端螺栓连接有固定架301,固定架301的左侧和右侧各螺栓连接有一个固定块3011,两个固定块3011的下侧各滑动连接有一个侧滑块302,两个侧滑块302与相邻的固定块3011之间各固接有一个第二弹簧件303,两个侧滑块302的相向侧各滑动连接有一个电动滑块304,两个电动滑块304的上侧各螺栓连接有一个托板305,两个托板305均通过载刀块9的第一卡槽911结构,将从卡刀筒6中换下的载刀块9接住。
37.以下将本便捷更换刀具的快速换刀数控机床简称为数控机床,本数控机床的数控机床本体1后侧安装有输送载刀块9和刀具的刀具输送机构11,每个载刀块9通过第四卡槽93各安装有一个不同类型的刀具,在起初的上刀工作中,机械夹10通过载刀块9上的第三卡槽92,将刀具输送机构11中的载刀块9及其携带的刀具夹持,接着第二电动转轴81同时带动第一固定臂82和第二固定臂83向左旋转一百八十度,第一固定臂82将机械夹10旋转至导向筒5的上方,接着机械夹10将载刀块9松开,使载刀块9携带刀具向下掉落至导向筒5内,载刀
块9通过导向凸块91先后沿导向筒5的第一导向槽51和卡刀筒6的第二导向槽61,向下滑落至卡刀筒6中,直到载刀块9外表面的第一卡槽911被卡在相应的卡板203上方,之后电动推杆201推动锁杆202向载刀块9方向移动,同时锁杆202带动第一弹簧件204向卡板203方向压缩,使锁杆202穿过卡板203的中部锁定在载刀块9的第二卡槽912中,使载刀块9及其所携带的刀具被锁定在卡刀筒6中,完成上刀工作。
38.上刀工作中,载刀块9沿第一导向槽51和第二导向槽61向下滑动期间,第一导向槽51和第二导向槽61均设置为螺旋结构,载刀块9携带刀具沿第一导向槽51和第二导向槽61向下移动过程中,受阻力而下移缓慢,避免载刀块9下落过快发生剧烈磕碰。
39.完成上刀工作后,驱动电机101的输出轴带动直齿轮102转动,直齿轮102啮合齿环104带动转环103旋转,转环103带动卡刀筒6及其所连接的载刀块9进行转动,在视觉摄像头41的监控下,实现转动的转环103对载刀块9及其所携带的刀具进行轴向角度调节工作,同时第一电动转轴32通过安装块4带动载刀块9及其所携带的刀具进行工作角度调节工作,并升降滑块31通过第一电动转轴32和安装块4带动载刀块9及其所携带的刀具,进行竖向位移调节工作,并配合进退机构2,对进退机构2中夹持的目标坯体进行自动化加工。
40.在完成一项刀具的工作后,开始换刀工作,首先驱动电机101的输出轴带动直齿轮102转动,使转环103带动卡刀筒6进行旋转,直到导向筒5的第一导向槽51与卡刀筒6的第二导向槽61相对齐,同时第一电动转轴32调节安装块4和卡刀筒6复位至竖直朝向状态,并升降滑块31带动第一电动转轴32、安装块4和卡刀筒6复位至上侧,同时机械夹10将刀具输送机构11中需要安装的载刀块9及其携带的刀具夹持,随后第二电动转轴81同时带动第一固定臂82和第二固定臂83向左旋转一百八十度,第一固定臂82和第二固定臂83,分别将机械夹10和承托组件旋转至导向筒5的上下两侧,完成定位工作,接着机械夹10将需要安装的载刀块9松开,使该载刀块9携带刀具向下掉落至导向筒5内,同时电动推杆201带动锁杆202、卡板203和第一弹簧件204向远离载刀块9方向移动,将锁杆202和卡板203抽离待更换的载刀块9,使该载刀块9沿卡刀筒6的第二导向槽61向下滑落并掉落在承托组件中,接着电动推杆201快速带动锁杆202和卡板203移动复位,使卡板203将沿导向筒5向下滑落的载刀块9接住,最后电动推杆201推动锁杆202带动第一弹簧件204向卡板203方向压缩,使锁杆202穿过卡板203的中部锁定在该载刀块9的第二卡槽912中,实现在仅需进行一次定位的条件下,多项工作同步进行,快速完成换刀工作。
41.待更换的载刀块9沿卡刀筒6的第二导向槽61向下滑落期间,载刀块9带动其所连接的刀具沿第二导向槽61的螺旋结构旋转,同时冷却液输送机构72通过进液管71向输液管7中输送冷却液,并输液管7将冷却液转移至环形盖板62内的蓄液槽622中,使冷却液通过喷头73喷淋在待更换的载刀块9及其所连接的刀具上,完成对刀具的冷却清洗工作。
42.从卡刀筒6中滑落的载刀块9掉落在承托组件中,两个托板305通过载刀块9外表面的第一卡槽911将其卡住,同时托板305受到载刀块9的重力带动电动滑块304和侧滑块302向下移动,使第二弹簧件303被拉伸,之后第二电动转轴81同时带动第一固定臂82和第二固定臂83向右旋转一百八十度进行复位,在承托组件携带换下的载刀块9和刀具进入刀具输送机构11中后,刀具输送机构11中的机械手将承托组件中的载刀块9夹持,同时两个电动滑块304分别带动两个托板305向两侧打开,使托板305将载刀块9松开,最后刀具输送机构11中的机械手将该载刀块9取走,结束换刀工作。
43.以上所述,为本发明较佳的具体实施方式,但并非本发明唯一的具体实施方式,本发明的保护范围并不局限于此,任何熟悉本领域的技术人员在本发明揭露的技术范围内结合现有技术或公众常识,根据本发明的技术方案及其发明构思加以等同、等效替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1